In questo progetto, utilizziamo due sensori fotoresistivi per progettare una semplice auto robot inseguitore di luce. Utilizzando una torcia per illuminare i moduli del resistore fotografico, l’auto robot seguirà la luce per andare avanti, accendere la luce o girare a sinistra proprio come un simpatico gatto gioca con la luce. I moduli fotoresistori sono costituiti da sensori nella parte anteriore della vettura; Puoi programmarlo per seguire la luce più forte.
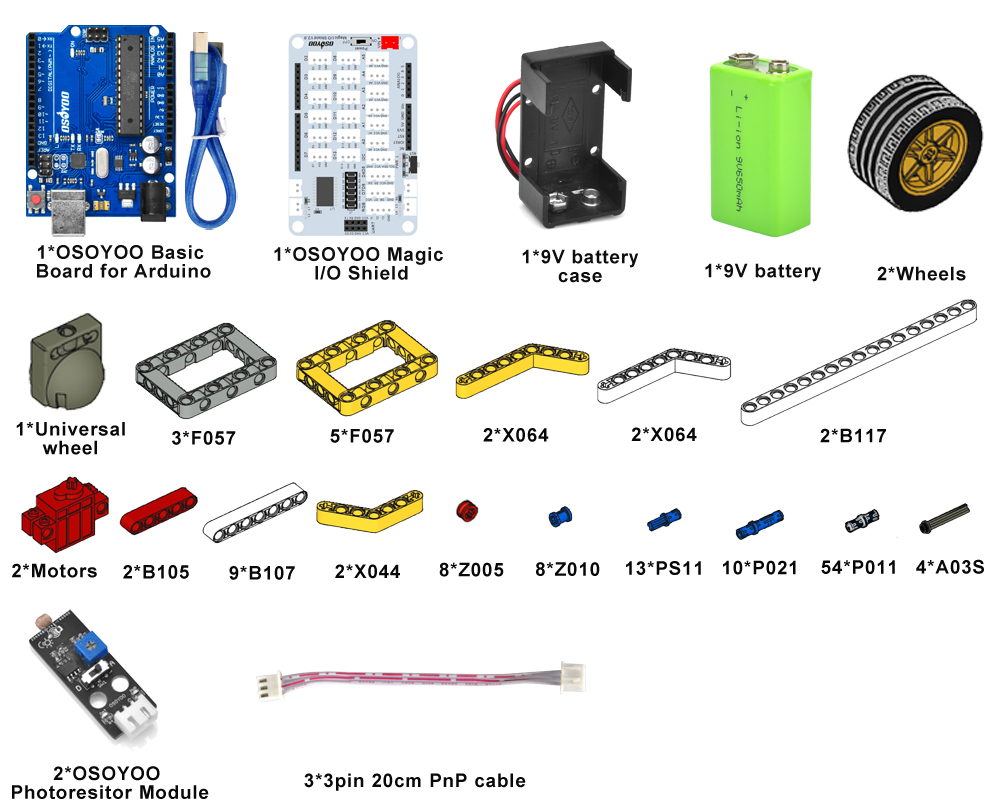
Si prega di preparare le seguenti parti per completare questo progetto NOTA:
1.il colore del blocco di costruzione è soggetto al prodotto reale, che non influisce sull’uso.
2. TUTTI I PRODOTTI OSOYOO PER ARDUINO SONO SCHEDE DI TERZE PARTI CHE SONO COMPLETAMENTE COMPATIBILI CON ARDUINO
Prima di costruire il robot con i blocchi, installare la scheda base OSOYOO per Arduino sotto OSOYOO Magic I/O shield come segue(Attenzione: i pin dello shield I/O sono allineati con la porta di base della scheda prima, quindi premere strettamente lo shield sulla scheda).
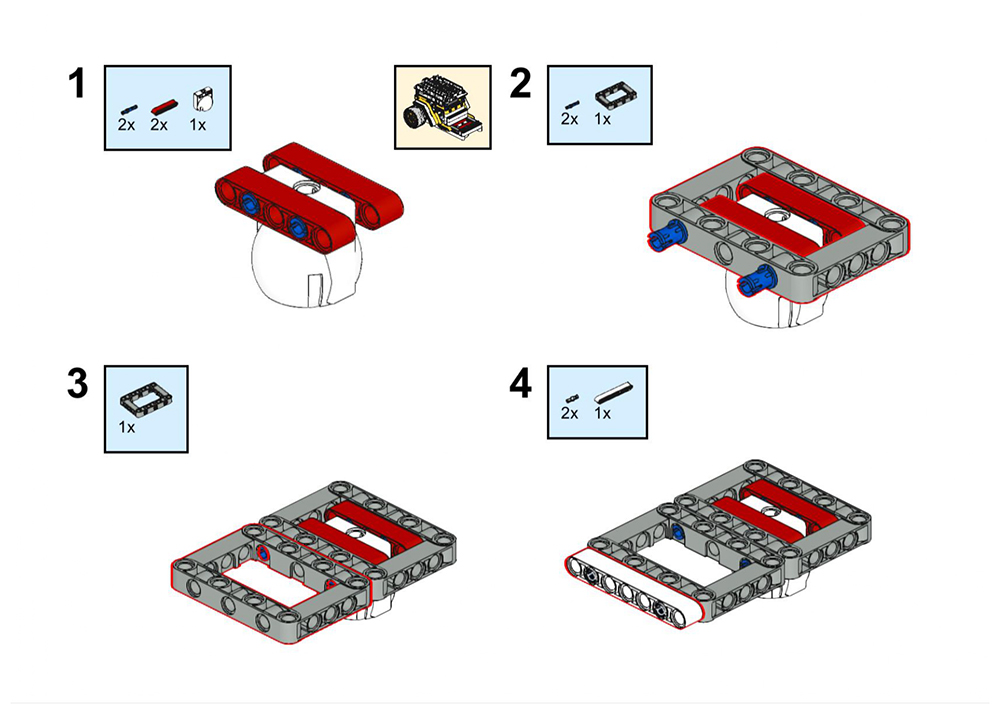
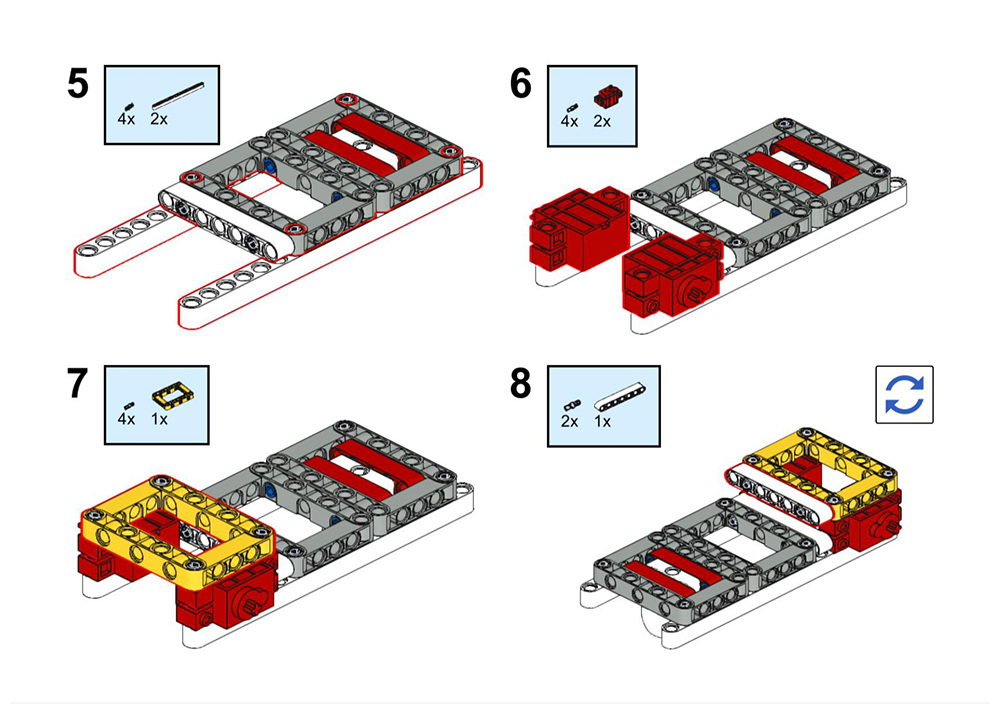
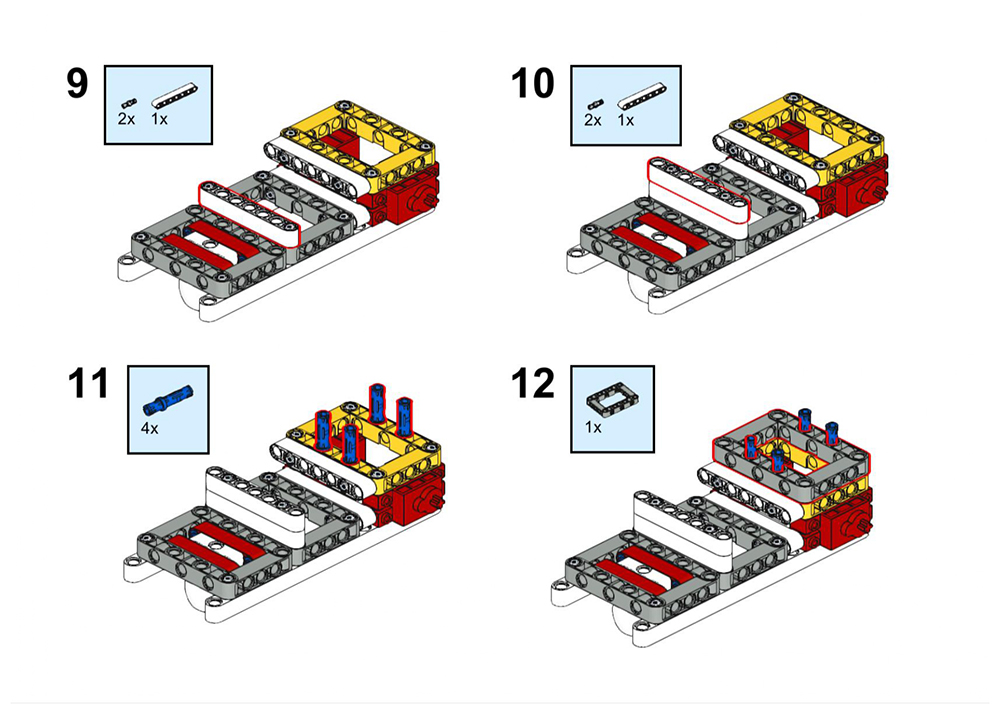
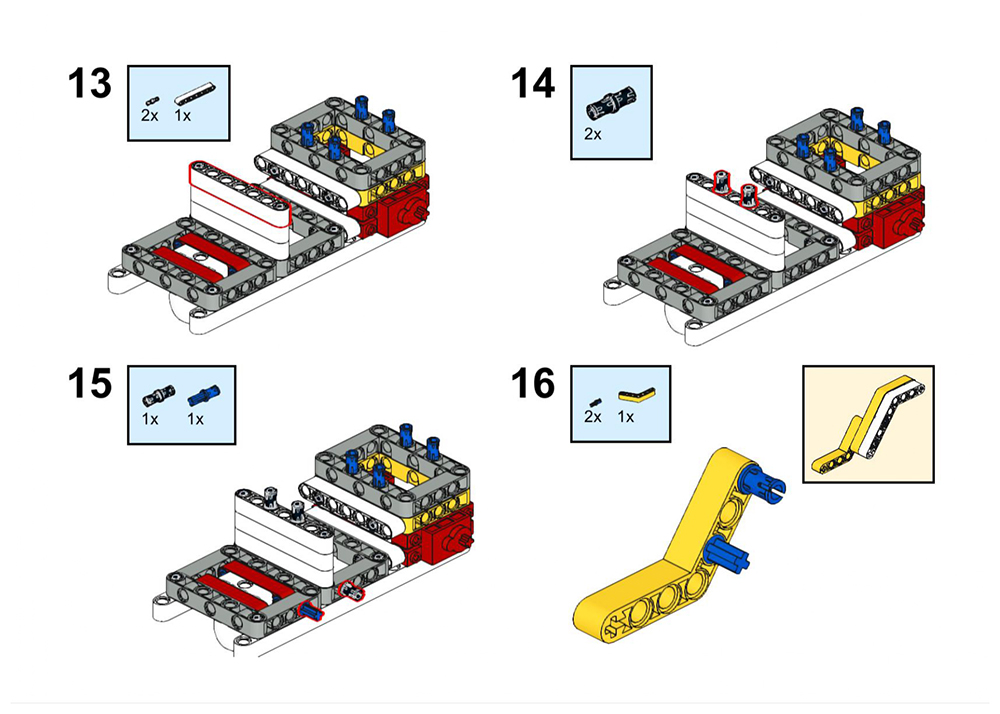
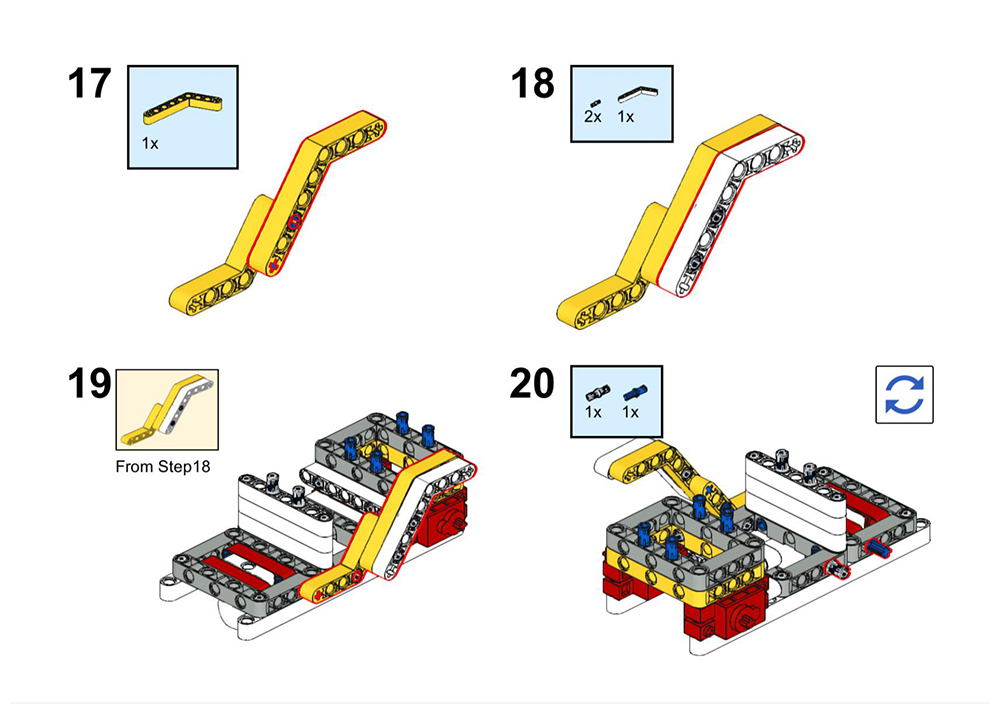
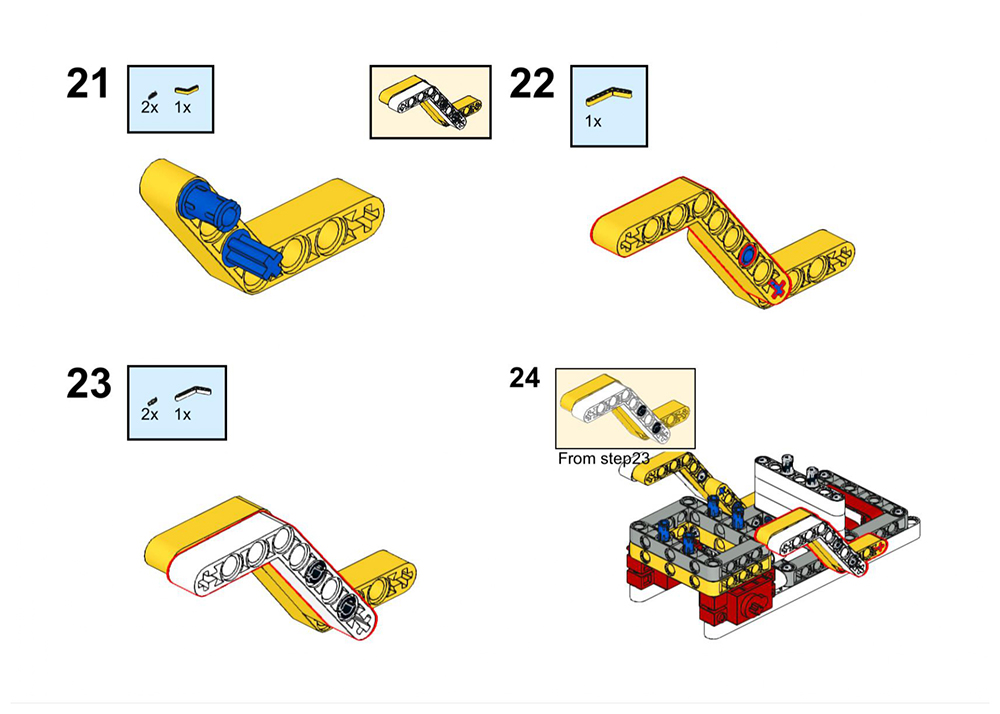
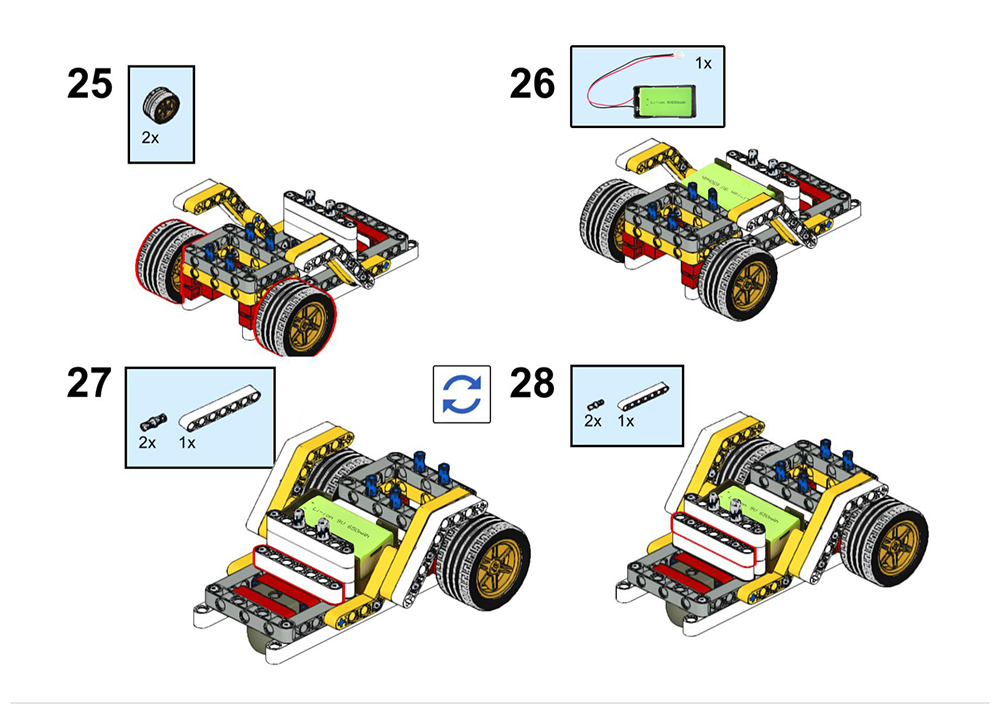
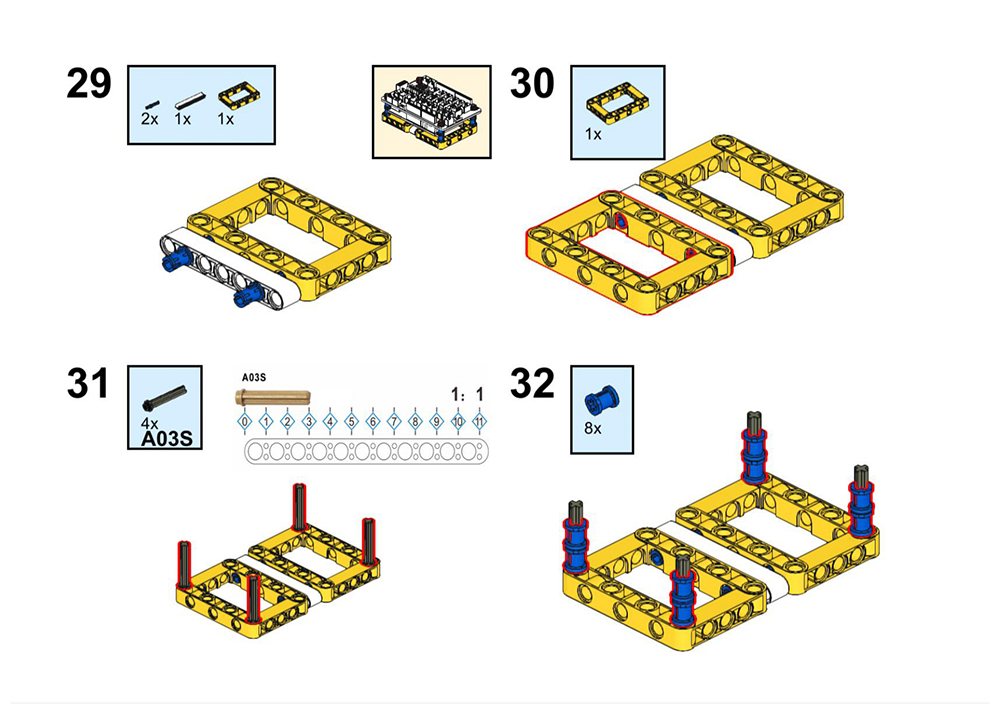
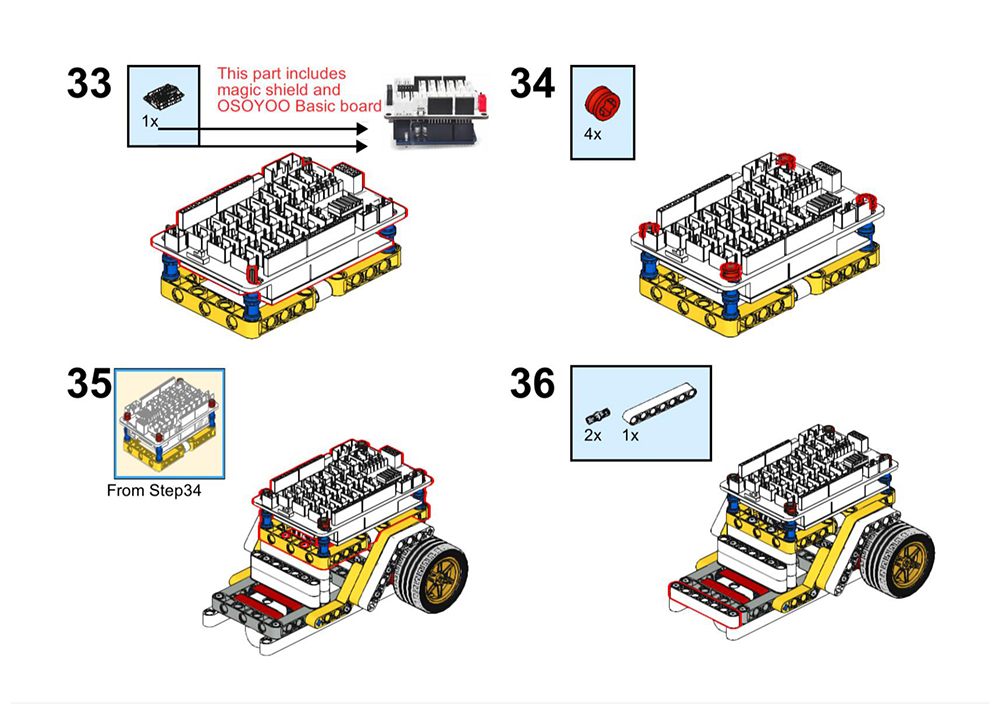
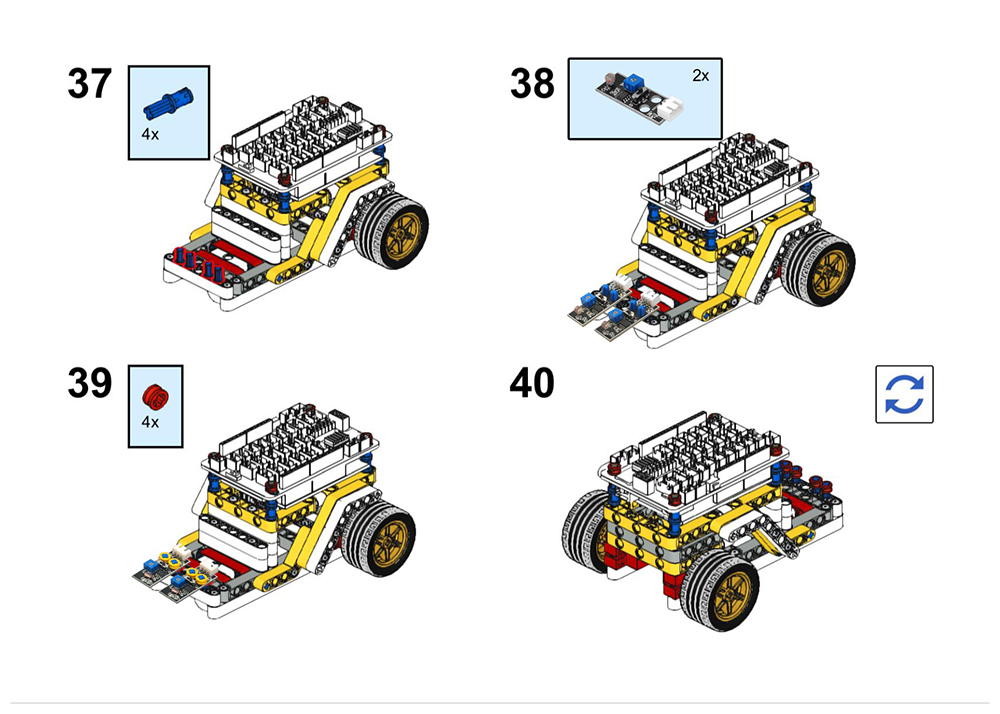
Si prega di seguire i passaggi di costruzione per costruire questa auto robot, Se si desidera ottenere chiari passaggi di costruzione PDF, si prega di scaricare da https://osoyoo.com/picture/Building_Robot_Car/lesson3/LESSON3.pdf
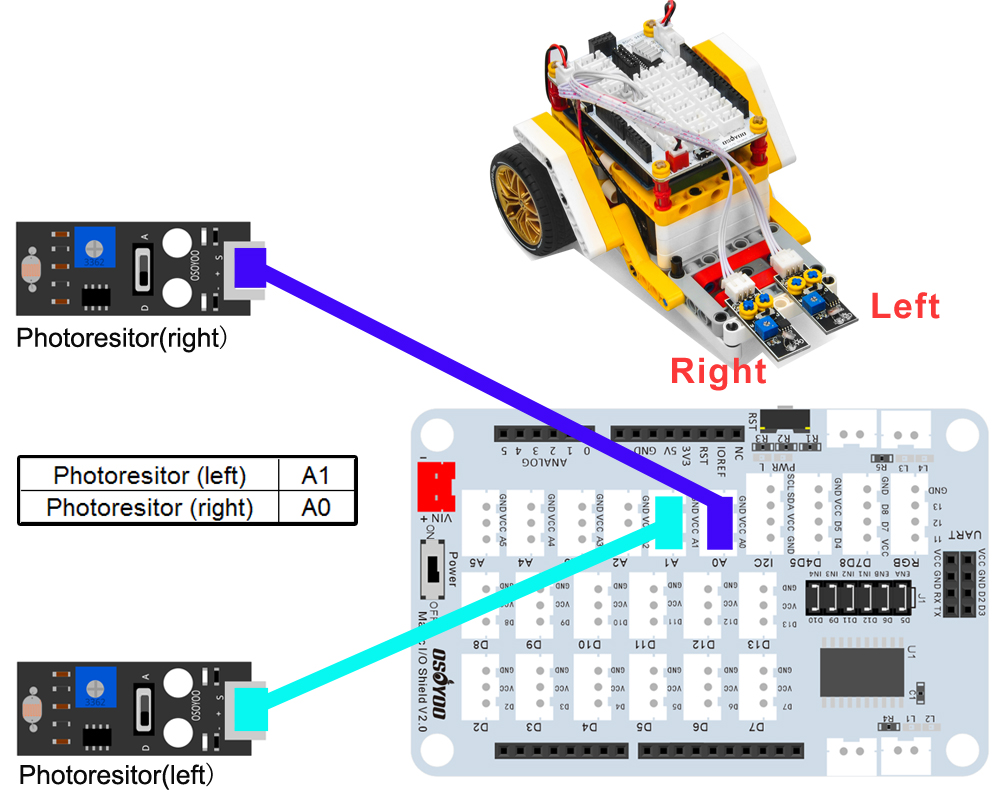
Si prega di collegare i motori e la custodia della batteria da 9 V come lezione1. Quindi collegare la fotoresistenza sinistra all’A1 dello shiel Magic I/O, a destra alla porta A0 con cavi PNP a 3 pin come di seguito (attenzione: ci sono sei tappi jumper su ENA/ENB/IN1/IN2/IN3/IN4):
Passo 1) Scarica mBlock PC da https://mblock.makeblock.com/en-us/download/, seleziona il file di download secondo il tuo computer Tipo di sistema operativo: Passo 2) Scarica il file del dispositivo OSOYOO_UNO.mext da https://osoyoo.com/driver/mblock/osoyoo_uno.mext Passo 3) Esegui il software per PC mBlock facendo doppio clic sull’incantevole icona Panda. Vedrai mBlock UI come immagine seguente. Si prega di eliminare il dispositivo predefinito CyberPi facendo clic sulla croce nel cerchio rosso.
Passo 4) Trascina e rilascia osoyoo_uno_mext file (scaricato nel passaggio 2) nel software mBlock come segue: Ora vedrai un nuovo firmware del dispositivo in mBlock, vedi la seguente immagine:
Ora si vedrà un nuovo firmware del dispositivo in mBlock, vedi immagine seguente:
Ora il software mBlock e il firmware del dispositivo OSOYOO_UNO sono stati installati con successo nel nostro PC!
Ora ti mostreremo come usare i blocchi per trasformare l’idea al di sopra dell’idea in realtà.
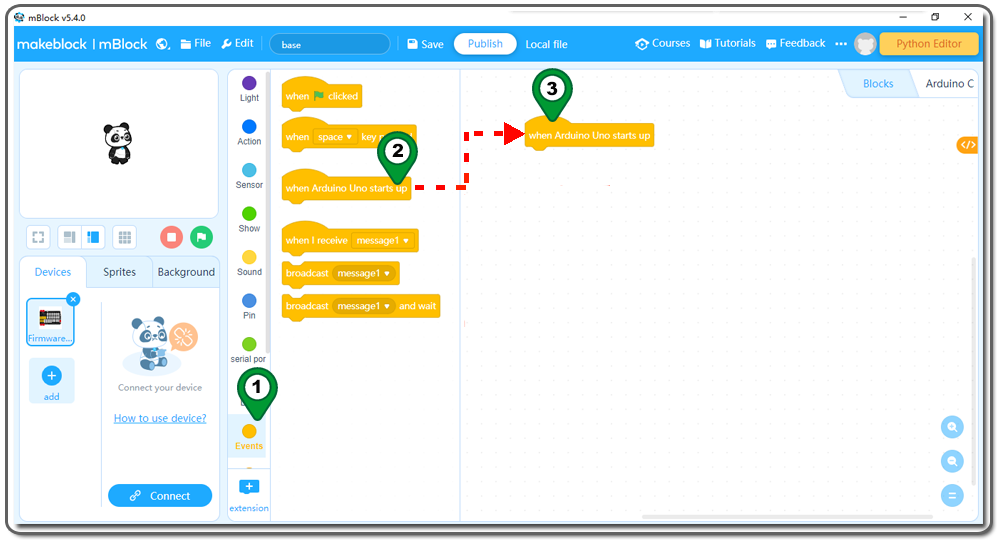
Passo 5) Fare clic su Events, aggiungere il blocco when Arduino Uno starts up in alto:
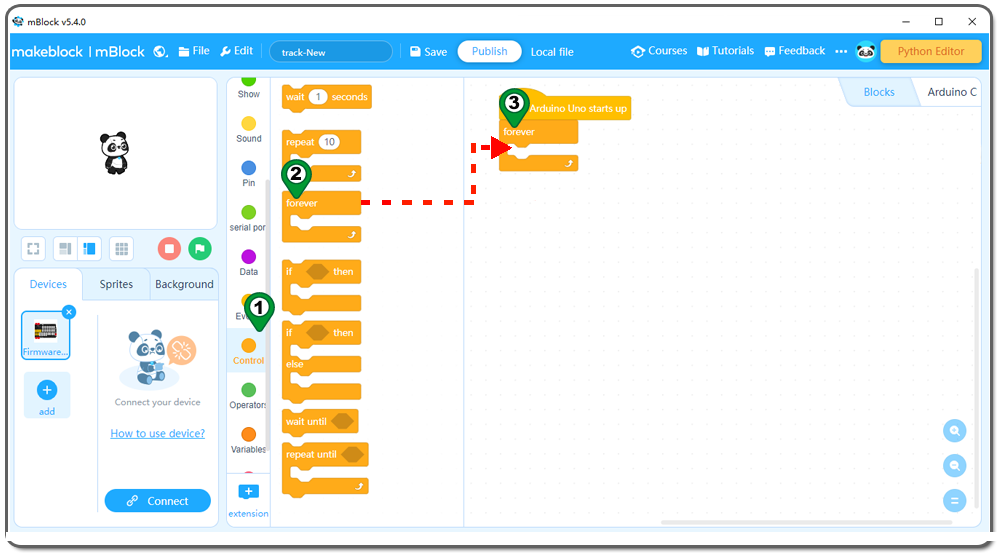
Passo 6): fare clic su Control, quindi trascinare il blocco Forever nell’area di programmazione come segue:
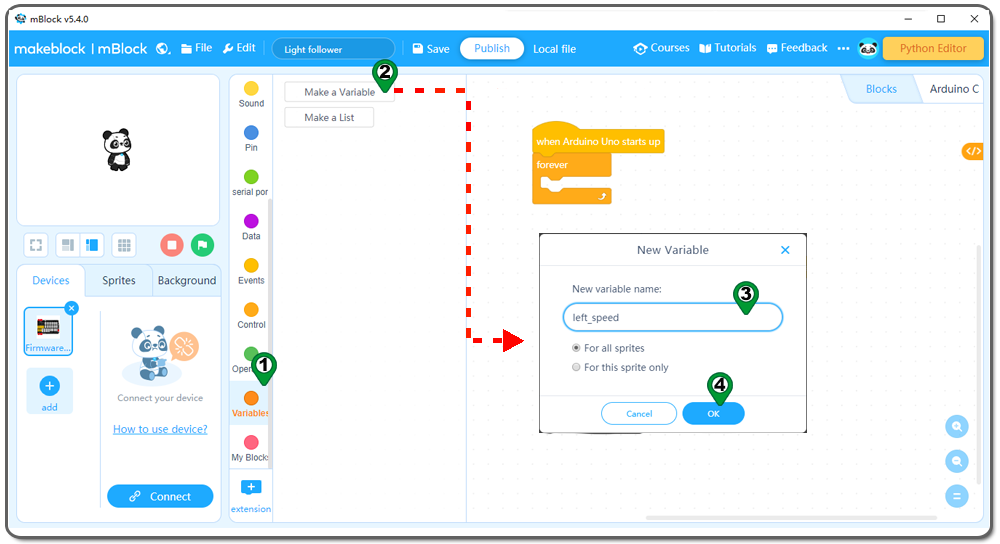
Passo 7):Fate clic su Variable , quindi su Make a Variable, si aprirà una nuova finestra di dialogo, scrivete left_speed, quindi fate clic su OK, per ottenere una nuova variabile left_speed ; utilizzate lo stesso metodo per creare una variabileright_speed F;
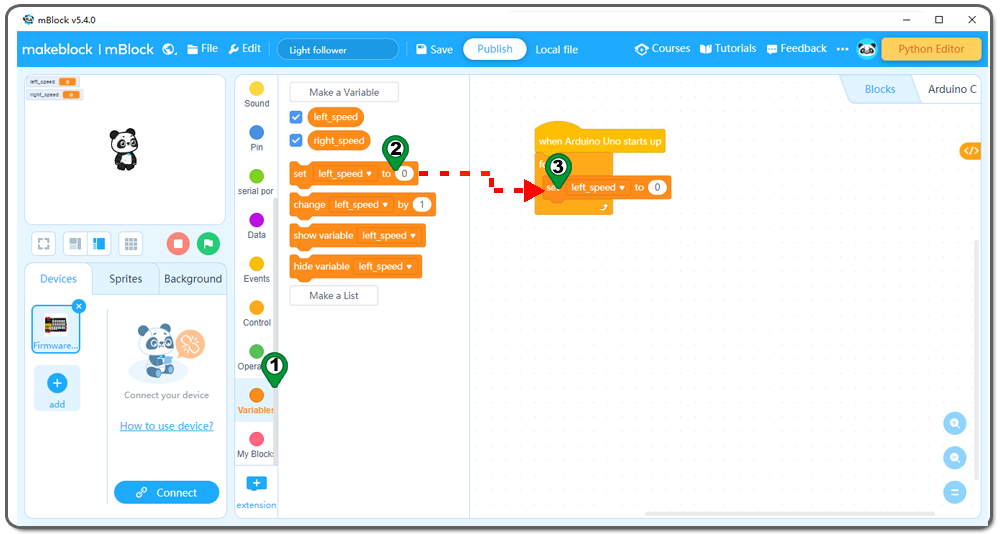
Passo 8): fare nuovamente clic su Variable, quindi trascinare il blocco set left_speed to nell’area di programmazione come segue:
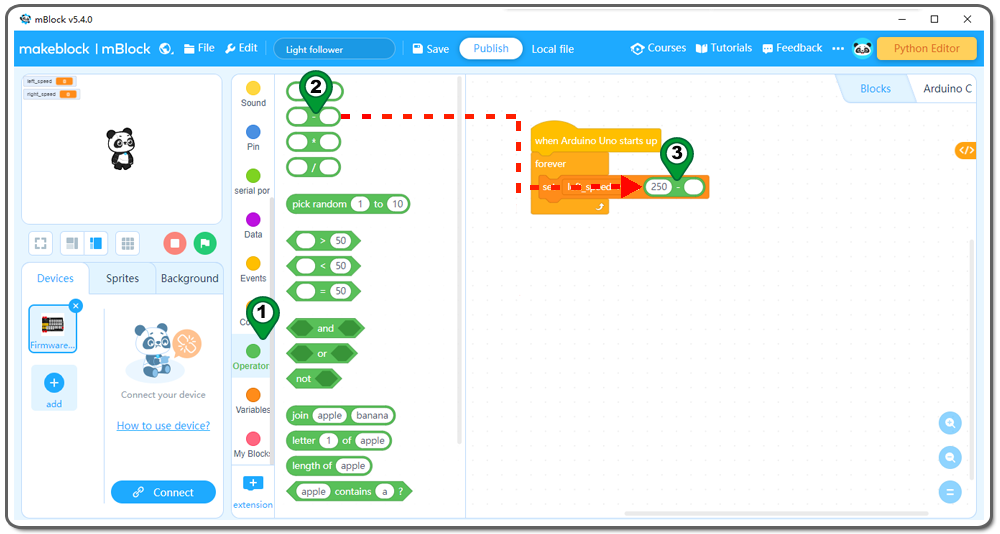
Passo 9): Fare clic su Operation, quindi trascinare e rilasciare il blocco 0-0 nell’area di programmazione, scrivere 250 nella prima area come di seguito indicato.
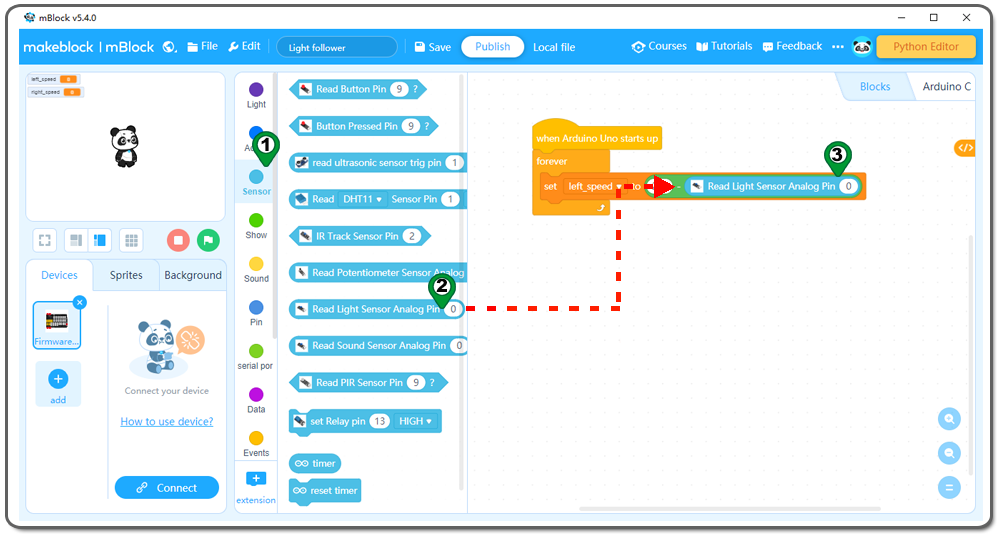
Passo 10): Fare clic su Sensor, quindi trascinare e rilasciare il blocco Read Light Sensor Analog Pin nell’area di programmazione come indicato di seguito.
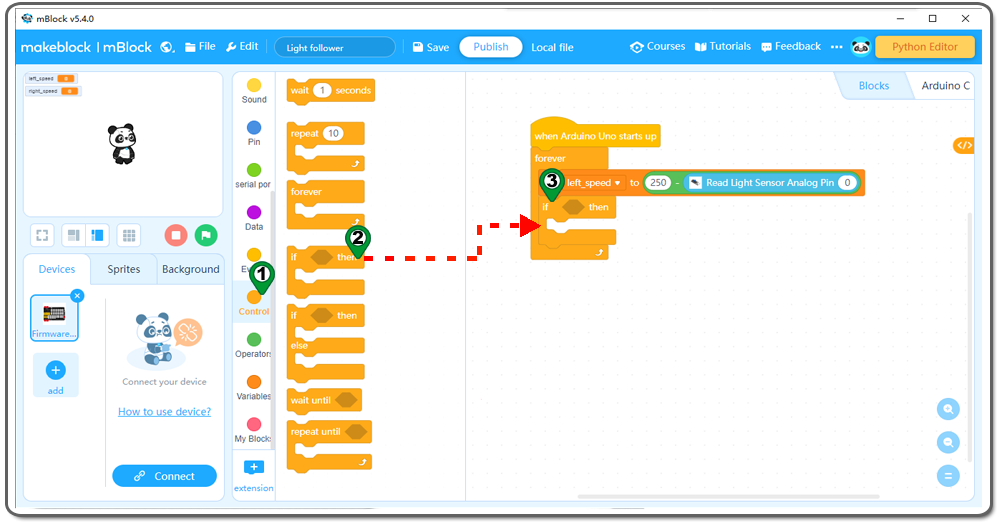
Passo 11 ):Fare clic su Control, aggiungere un blocco if then all’interno del ciclo forever come segue:
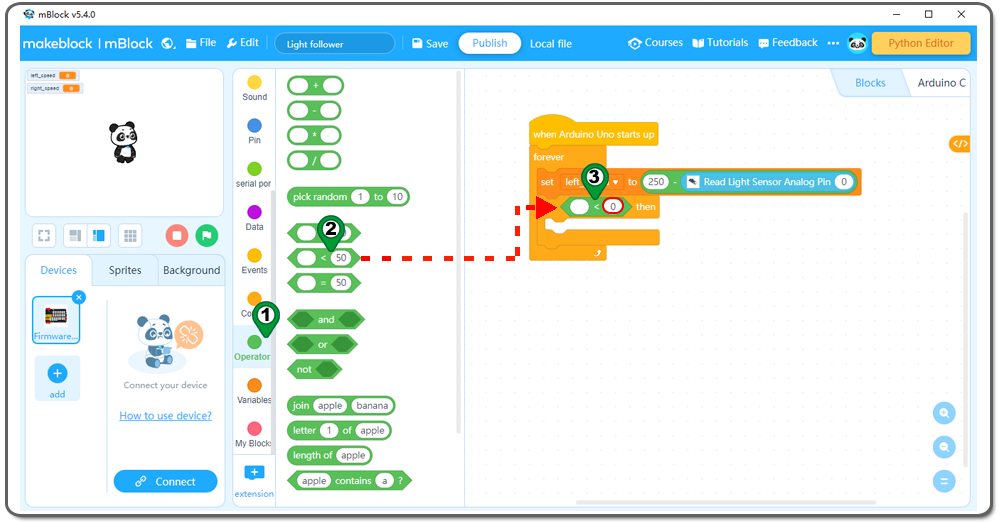
Passo 12 ): fare clic su Operation , quindi trascinare e rilasciare il blocco 0<0 nell’area di programmazione, scrivere 0 nella seconda area come indicato di seguito.
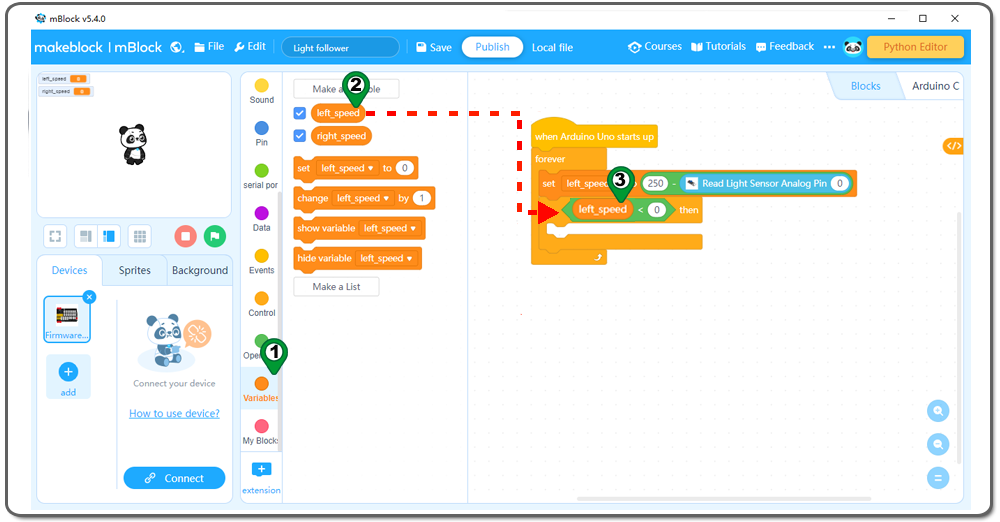
Passo 13 ):fare clic su Variable , quindi trascinare il blocco left_speed nell’area di programmazione come segue:
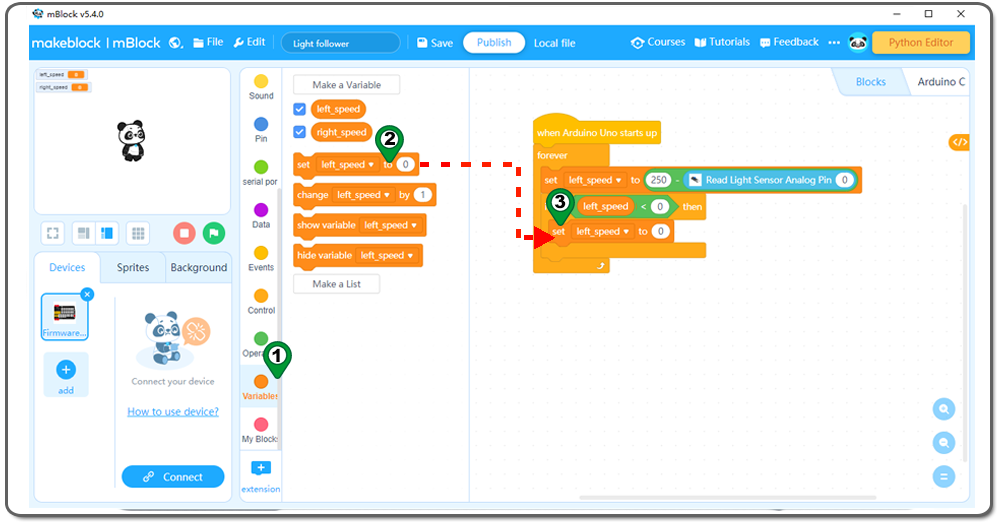
Passo 14 ): fare nuovamente clic su Variable , quindi trascinare il blocco set left_speed to nell’area di programmazione come segue:
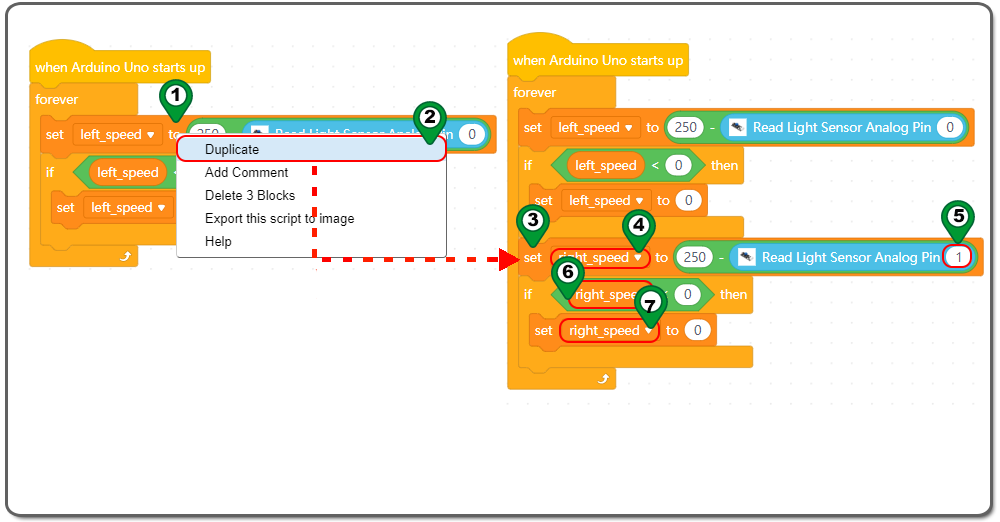
Passo 15 ): Fare clic con il pulsante destro del mouse sul blocco set left_speed to, quindi trascinare e rilasciare il blocco dietro il blocco if then, modificando la velocità sinistra in velocità destra come segue:
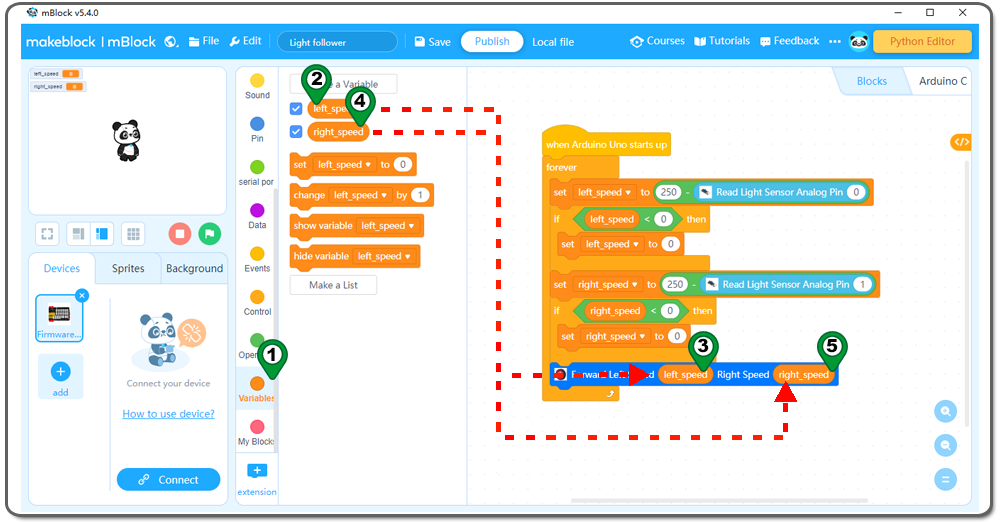
Passo 16 ): Fare nuovamente clic su Action, quindi trascinare il blocco Forward Left Speed 100 Right Speed 100 nell’area di programmazione come segue:
Passo 17): Fare clic su Variable , quindi su left_speed block e right_speed block per programmare l’area come segue:
Ora abbiamo completato la programmazione dei blocchi. I blocchi finali hanno il seguente aspetto:
Ora tutti i blocchi di programmazione sono stati completati! Dall’immagine sopra, la logica è piuttosto semplice:
Quando Arduino viene avviato, il computer entrerà in un loop morto che controllerà lo stato del pulsante, quando il pulsante non viene premuto, il servo si fermerà nella posizione originale (nel mio servo 0 gradi) e l’ascensore è a terra, quando viene premuto il pulsante, il braccio servo ruoterà da 0 gradi alla posizione di 180 gradi e l’ascensore verrà sollevato in aria.
Passo 18) Carica il programma sulla scheda base OSOYOO
1) Si prega di collegare la scheda di base OSOYOO al PC con cavo USB in primo luogo. Quindi fare clic sul pulsante Connetti nella parte inferiore del software mBlock, verrà visualizzata una finestra USB,
2) selezionare la casella di controllo Mostra tutti i dispositivi collegabili, quindi verrà visualizzato un menu a discesa del dispositivo,
3) selezionare la porta dal menu a discesa del dispositivo
4) fare clic sul pulsante Connetti per collegare il PC alla scheda di base OSYOOO.
5) Dopo che il PC è collegato alla scheda di base OSYOOO, fare clic sul pulsante Carica nella parte inferiore del software, quindi il codice verrà caricato sulla scheda di base OSOYOO:
Nelle precedenti Lezioni 1 e 2 abbiamo appreso alcuni blocchi di base del programma di controllo e azione. In questa lezione verranno illustrati alcuni nuovi blocchi di programma: i)Read Light Sensor from Analog Pin Block from Sensor category
Questo blocco ha una forma ovale, il che significa che restituisce un valore numerico compreso tra 0 e 255. Il numero zero sul lato destro significa che il sensore leggerà il valore della luce dal pin A0 (sensore di luce sinistro).
ii)Minus calculation block from Operator category
Il blocco precedente calcola il risultato di 250 meno il valore del sensore A0..
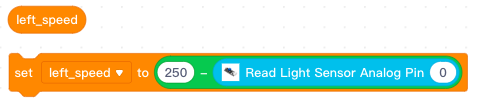
iii)Variable Block and Set Variable to Block in Variable Category:
Il blocco Variable viene spesso definito per salvare un risultato di calcolo per un uso successivo.
Il blocco precedente definisce un blocco variabile “left_speed”, quindi imposta il suo valore sul calcolo di 250 meno il valore di ritorno del sensore di luce A0. Se il valore della luce è più alto, la velocità left_speed è più piccola, quindi l’auto svolterà a sinistra.
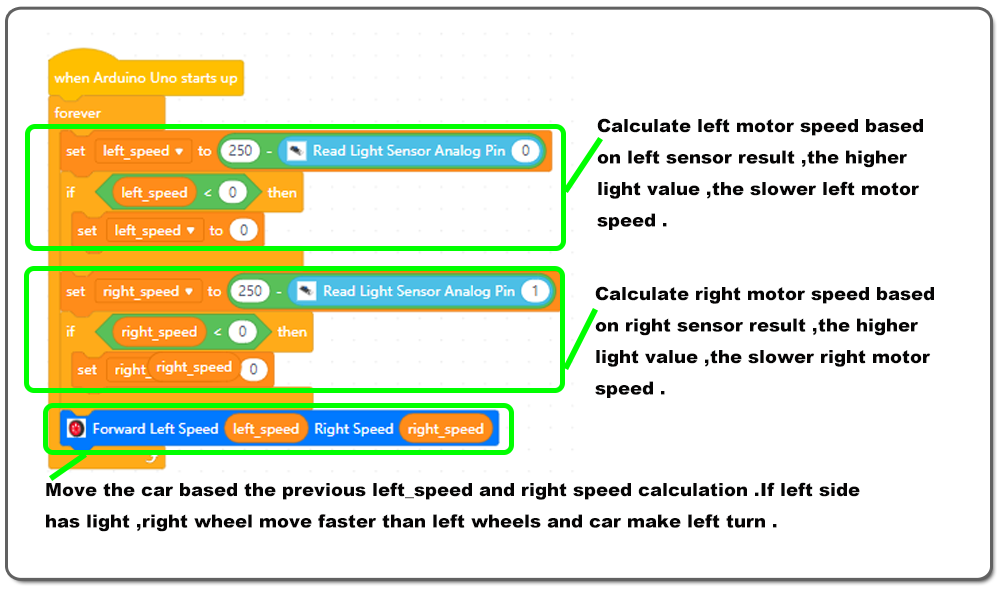
Ecco la spiegazione completa del blocco del programma:
Il principio di funzionamento del fotoresistore è che la luce più forte del rilevamento del fotoresistore, il valore inferiore della lettura del fotoresistore. Il valore della lettura della fotoresistenza è maggiore di 0.
Nel programma impostiamo la velocità del motore sinistro come variabile di left_speed, la velocità del motore destro come variabile di right_speed. La velocità del motore è compresa tra 0-255.
La variabile di left_speed è uguale a 250 meno il valore della lettura del fotoresistore sinistro (A0) e la variabile di right_speed è uguale a 250 meno il valore della lettura del fotoresistore destro (A1). Se le variabili sono minori di 0, il programma imposta queste variabili uguali a 0。
Se il valore della lettura del sensore sinistro (A0) è inferiore a 250, il motore sinistro si sposterà in avanti;
Se il valore della lettura del sensore sinistro (A0) è superiore a 250, il motore sinistro si arresterà;
Se il valore della lettura del sensore destro (A1) è inferiore a 250, il motore destro andrà avanti;
Se il valore della lettura del sensore corretto (A1) è superiore a 250, il motore destro si arresterà;
Se il valore di entrambe le letture del sensore è inferiore a 250, entrambi i motori vanno avanti.
Carica il codice dello sketch followlight.ino su Arduino. Accendi l’auto.
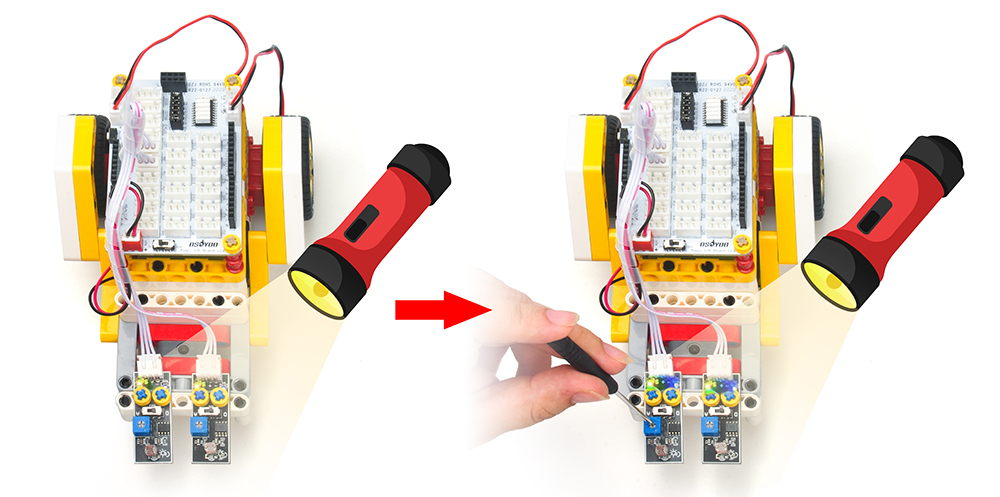
Illuminare il sensore di fotoresistenza anteriore con una torcia. Quindi l’auto seguirà la torcia per fare movimento.
Se la torcia brilla sul sensore fotoresistore, ma l’auto non si muove. Si prega di regolare il regolatore come mostrato nell’immagine. In circostanze normali, la luce gialla e la luce blu saranno accese contemporaneamente quando la torcia è accesa.