Mecanum Wheel Robot Car Pacchetto completo (con batterie 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
In questa lezione, devi completare la lezione 1 prima di continuare con questa lezione. Utilizziamo il modulo ad ultrasuoni per “vedere” gli ostacoli e misurare la distanza. Se la distanza è inferiore al valore di soglia predefinito, il buzzer emetterà un segnale acustico e l’auto si girerà automaticamente dall’ostacolo.
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2 ruote a sinistra / 2 ruote a destra e motore x 4)
Scheda OSOYOO Mega2560 completamente compatibile con Arduino x 1
Scudo WiFi OSOYOO x 1
Driver del motore OSOYOO modello Y x 1
Servomotore OSOYOO MG90 x 1
Modulo sensore ad ultrasuoni OSOYOO x1
OSOYOO Supporto per montaggio ad ultrasuoni
Scatola batteria OSOYOO x 1
OSOYOO ponticello da 3 pin femmina a femmina x1
OSOYOO 6 pin maschio a ponticello femmina x2
OSOYOO 2 pin XH.25 da femmina a femmina x1
OSOYOO ponticello a 10 pin da maschio a femmina x1
18650 batterie (3,7 V) x 2
Devi completare la lezione 1 (assemblaggio della macchina) prima di continuare con questa lezione. In questa lezione 3, aggiungeremo un servomotore MG90 alla macchina robotica costruita nella lezione 1
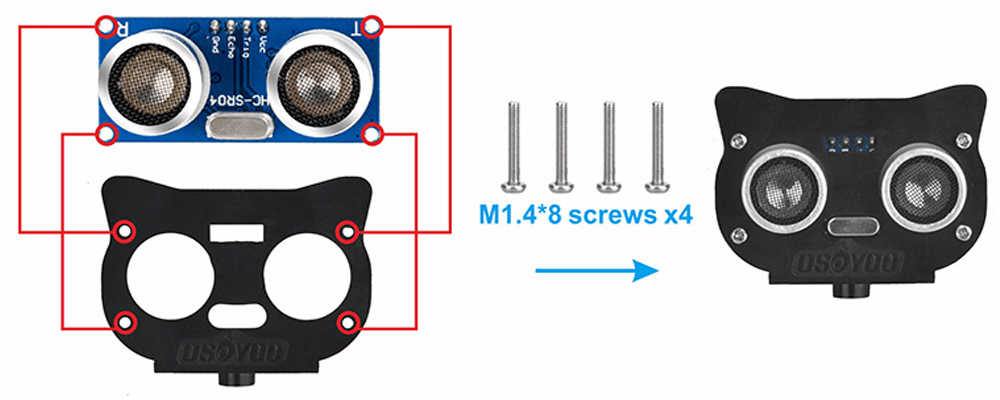
Passo 1: Installa il modulo ultrasonico sul supporto di montaggio con 4 viti M1.4*8 e dadi M1.4.
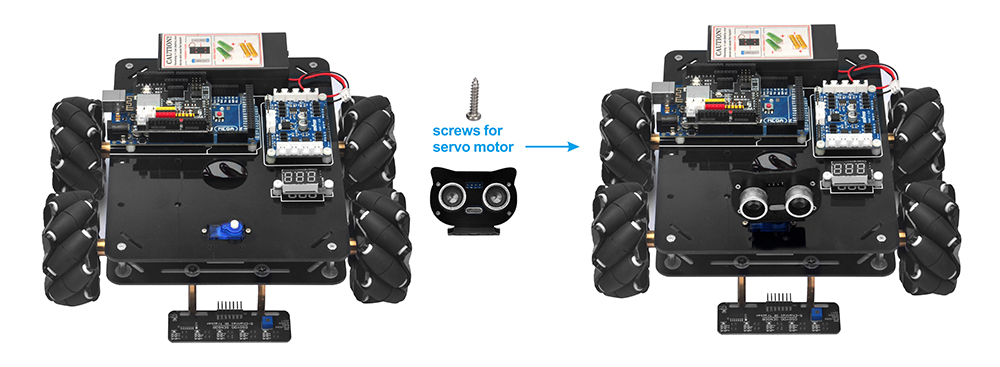
Passo 2: Installa il supporto di montaggio per il modulo ultrasonico sul motore del servomotore con una vite autofilettante M2*4.
Quando si posiziona l’ultrasuono sotto, le viti autofilettanti si possono facilmente danneggiare.
A. Supportare il motore dal basso, in quanto le viti autofilettanti si possono facilmente danneggiare.
B. Non inserire le viti fino dopo il processo di allineamento
Devi completare il collegamento del circuito della lezione 1 (assemblaggio dell’auto). Non c’è bisogno di cambiare nulla, mantieni solo il collegamento hardware come è
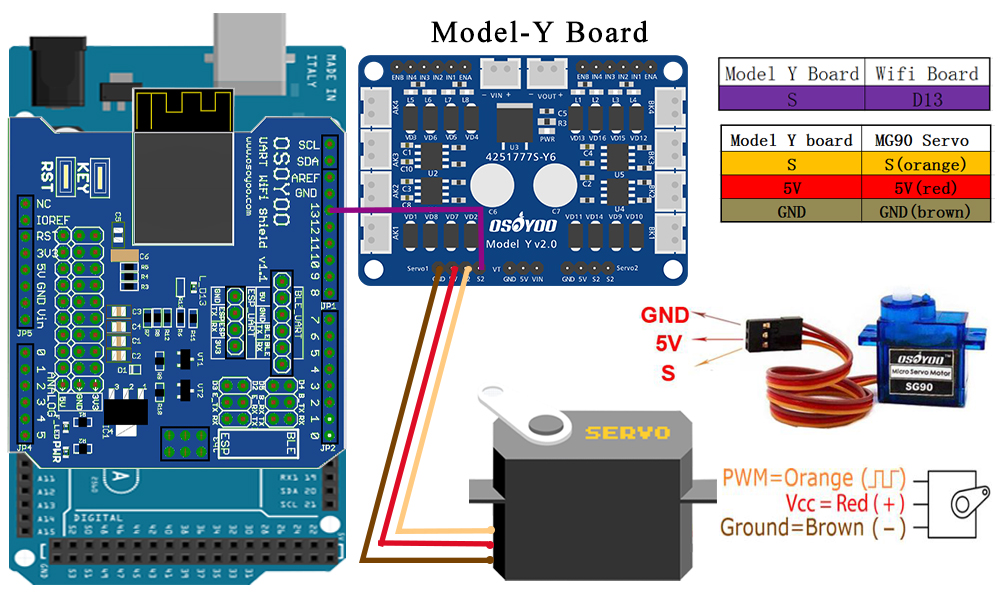
Passo 3: Mantieni tutti i collegamenti della lezione 1 come sono. Prima di collegare i fili, assicurati di aver collegato il motore servo SG90 alla scheda Model Y e alla scheda wifi OSOYOO uart come segue..
(Nota: devi dividere 1 pezzo di fili a ponticello maschio-femmina dal nostro bundle di 10 fili a ponticello. Qualsiasi colore del bundle andrà bene. Il resto dei fili è come pezzi di ricambio per eventuali fili rotti o danneggiati.)
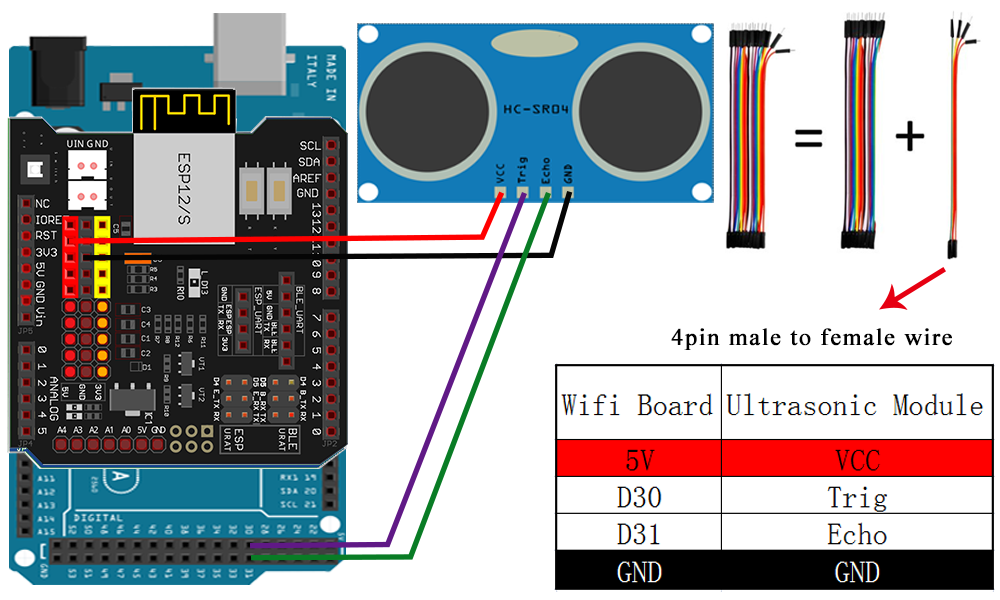
Passaggio 4: Connetti il VCC, Trig, Echo, GND del modulo ultrasonico ai pin 5V, D30, D31, GND dello scudo wifi OSOYOO con 4 cavi maschio-femmina.
(Nota: devi dividere 4 cavi maschio-femmina dal pacchetto di 10 cavi maschio-femmina. Qualsiasi colore dal pacchetto va bene. Gli altri cavi sono come parti di ricambio in caso di cavi rotti o danneggiati.)
Passo 1: Installa l’ultima versione di Arduino IDE (Se hai già la versione di Arduino IDE dopo la 1.1.16, puoi saltare questo passaggio). Scarica Arduino IDE da https://www.arduino.cc/en/Main/Software?setlang=en e poi installa il software.
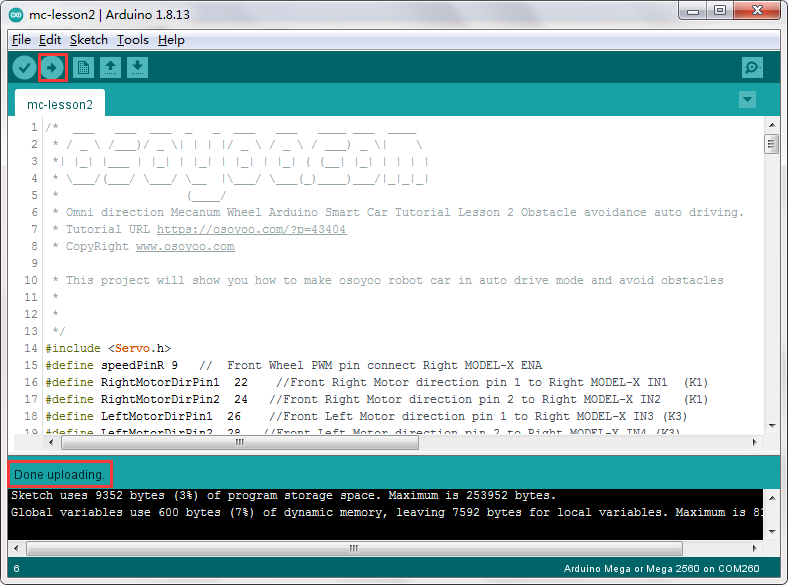
Passo 3: Collega la scheda Mega2560 al PC tramite cavo USB, Apri Arduino IDE -> clicca su file -> clicca su Apri -> scegli il codice “m2-lesson2” nella cartella della lezione e carica il codice in Arduino come segue..
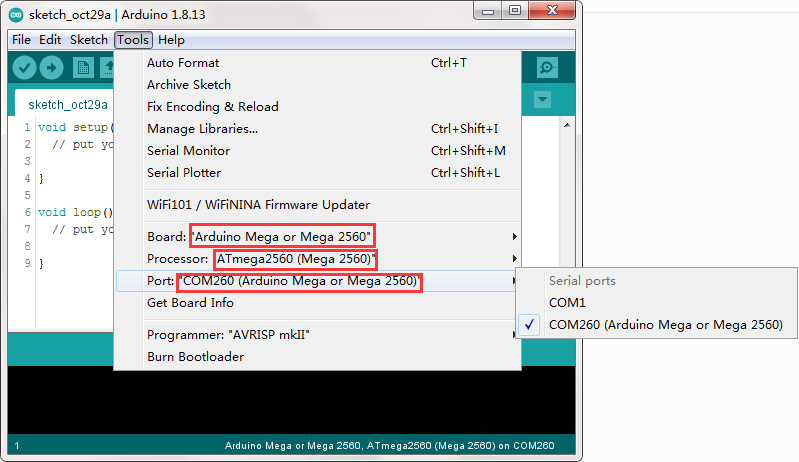
Passo 4: Scegliere la scheda/porta corrispondente per il tuo progetto, caricare lo sketch sulla scheda.
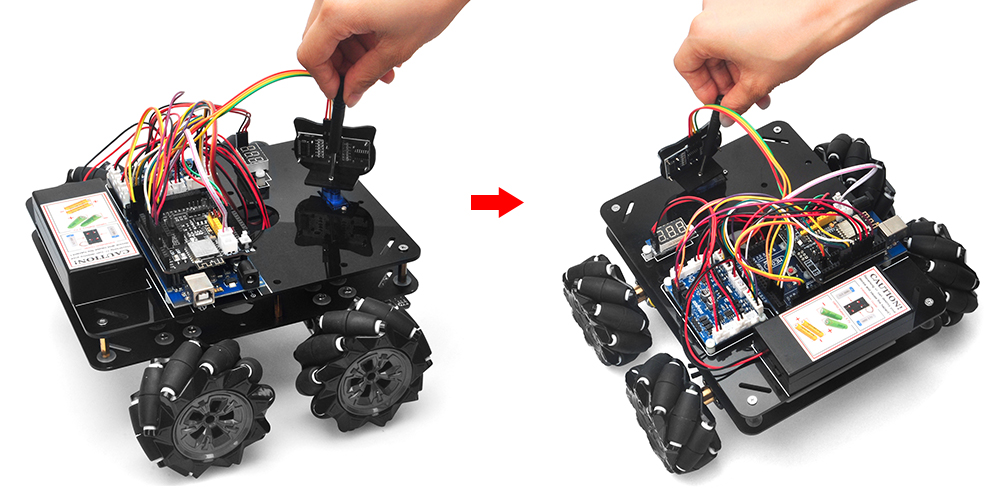
Passaggio 5: Allineamento iniziale della direzione del sensore ad ultrasuoni e del servomotore
Dopo aver acceso la batteria, il servomotore effettuerà alcuni movimenti e infine si fermerà in una direzione per 5 secondi.
Durante questi primi 5 secondi, è necessario assicurarsi che il sensore ad ultrasuoni (due occhi) sia rivolto dritto in avanti.
Se non è dritto in avanti, si deve spegnere immediatamente la batteria e rimuovere il sensore dal servomotore, reinstallarlo e orientarlo nella direzione corretta come nella figura seguente. In caso contrario, il programma di evitamento ostacoli non funzionerà correttamente.
Dopo aver regolato la direzione del sensore, accendere nuovamente la batteria. Se la direzione non è dritta in avanti, spegnere la batteria e procedere nuovamente con l’allineamento della direzione.
Se il modulo ad ultrasuoni si trova nella posizione frontale, significa che non è necessario regolare la posizione del sensore. Basta attendere 5 secondi. Se non viene rilevato alcun ostacolo, l’auto procederà in avanti. Se viene rilevato un ostacolo, l’auto si fermerà, il modulo ad ultrasuoni si sposterà da destra a sinistra per rilevare gli ostacoli circostanti. Il robot deciderà di svoltare a sinistra, a destra o di retrocedere in base ai dati del sensore degli ostacoli e al nostro algoritmo di evitamento degli ostacoli..
A volte la tua auto potrebbe subire una collisione e fare in modo che la posizione del tuo sensore ad ultrasuoni cambi, devi ricordarti di effettuare nuovamente l’allineamento della direzione del sensore.
Il robot deciderà di svoltare a sinistra, a destra o di retrocedere in base ai dati del sensore degli ostacoli e al nostro algoritmo di evitamento degli ostacoli. A volte la tua auto potrebbe subire una collisione e fare in modo che la posizione del tuo sensore ad ultrasuoni cambi, devi ricordarti di effettuare nuovamente l’allineamento della direzione del sensore.
Parametri importanti nel file dello sketch
I seguenti parametri nella riga da 35 a 39 di m2-lesson2.ino sono molto importanti per ottimizzare le prestazioni. Vedere i commenti nelle dichiarazioni #define:
#define FAST_SPEED 170 //entrambi i lati della velocità del motore
#define SPEED 100 //entrambi i lati della velocità del motore
#define TURN_SPEED 150 //entrambi i lati della velocità del motore
#define BACK_SPEED1 150 //velocità di ritorno
#define BACK_SPEED2 100 //velocità di ritorno