Mecanum Wheel Robot Car Full Package (avec batteries 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
Les voitures robots ci-dessus sont contrôlées par Arduino. Si vous avez une carte Raspberry Pi, la voiture robot peut également être contrôlée par Raspberry Pi. Vous pouvez visiter le lien suivant pour apprendre le mouvement de base avec Raspberry Pi.
lien- https://osoyoo.com/?p=31428
Dans cette leçon, vous devez terminer la leçon 1 avant de continuer avec cette leçon. nous utilisons le module à ultrasons pour “voir” l’obstacle et mesurer la distance. Si la distance est inférieure à la valeur de seuil prédéfinie, le buzzer émettra un bip et la voiture se détournera automatiquement de l’obstacle.
Châssis de voiture robotique OSOYOO Mecanum Wheels x 1 (2 roues gauches / 2 roues droites et moteur x 4)
Carte OSOYOO Mega2560 entièrement compatible avec Arduino x 1
Bouclier Wi-Fi OSOYOO x 1
Pilote de moteur OSOYOO modèle Y x 1
Servomoteur OSOYOO MG90 x 1
Module de capteur à ultrasons OSOYOO x1
Support de montage à ultrasons OSOYOO
Boîtier de batterie OSOYOO x 1
Fil de raccordement femelle à femelle OSOYOO 3 broches x1
Fil de connexion OSOYOO 6 broches mâle à femelle x2
OSOYOO 2 broches XH.25 femelle à femelle x1
Fil de connexion OSOYOO 10 broches mâle à femelle x1
Piles 18650 (3,7 V) x 2
Vous devez terminer la leçon 1 (assemblage de la voiture) avant de continuer avec cette leçon. Dans cette leçon 3, nous ajouterons un servomoteur mg90 et à la voiture robotique construite dans la leçon 1.
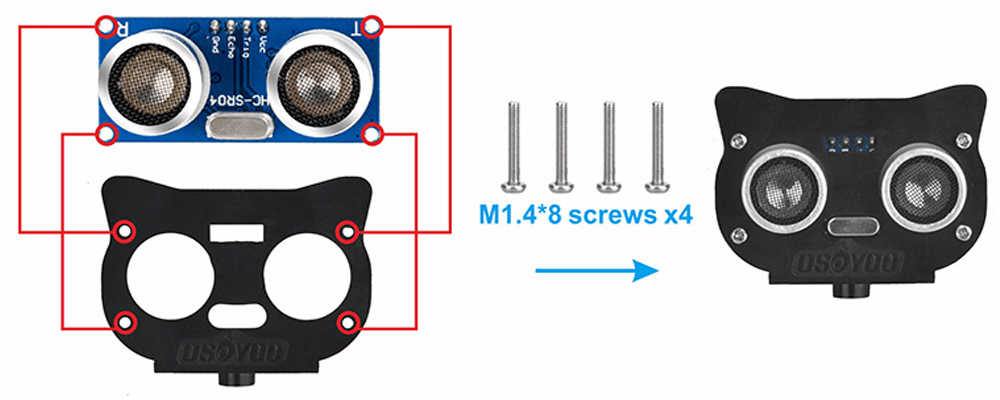
Étape 1 : installez le module à ultrasons pour monter le support avec 4 vis M1.4*8 et écrous M1.4.
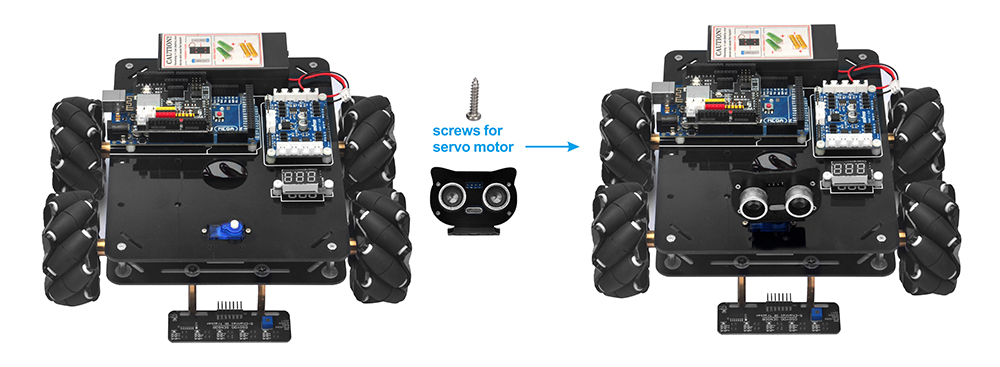
Étape 2 : Installez le support de montage pour le module à ultrasons sur le servomoteur avec une vis autotaraudeuse M2 * 4.
Lorsque vous placez l’ultrason en dessous, les vis autotaraudeuses se dénudent facilement.
A. Soutenez le moteur par le dessous, car les vis autotaraudeuses se dénudent facilement.
B. N’insérez pas la vis avant la fin du processus d’alignement.
Vous devez terminer la leçon 1 (montage de la voiture) connexion du circuit. Pas besoin de changer quoi que ce soit, gardez simplement la connexion du fil matériel telle quelle.
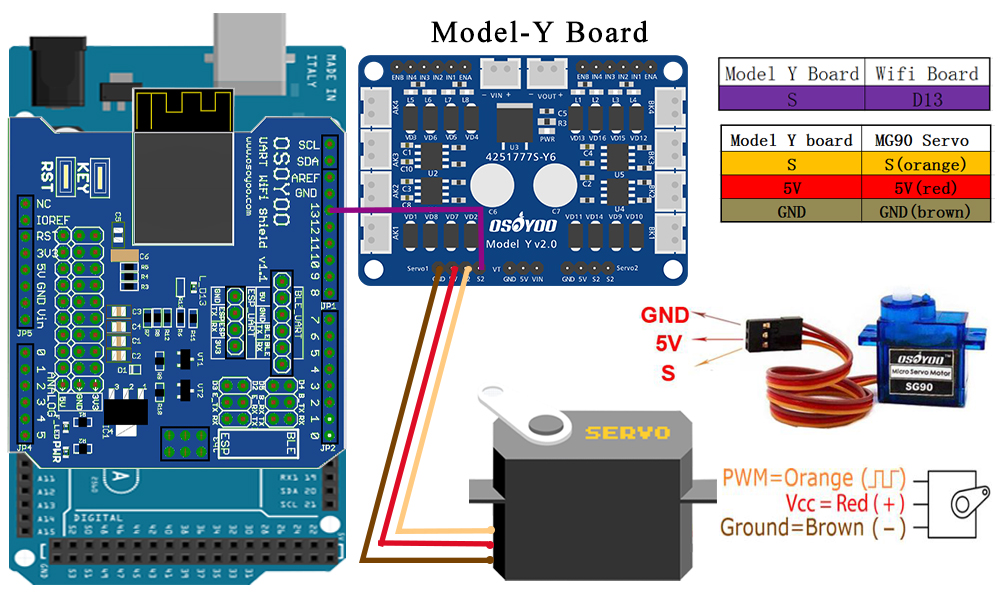
Étape 3 : veuillez conserver toutes les connexions de la leçon 1 telles quelles. Avant de connecter les fils, assurez-vous que vous avez connecté le servomoteur SG90 à la carte modèle Y et au bouclier wifi OSOYOO uart comme suit.
(Remarque : vous avez besoin de séparer 1 pcs de fils de raccordement mâle-femelle de notre lot de 10 fils de raccordement. N’importe quelle couleur du lot sera ok. Le reste des fils sont des pièces de rechange pour les fils potentiellement cassés ou endommagés.)
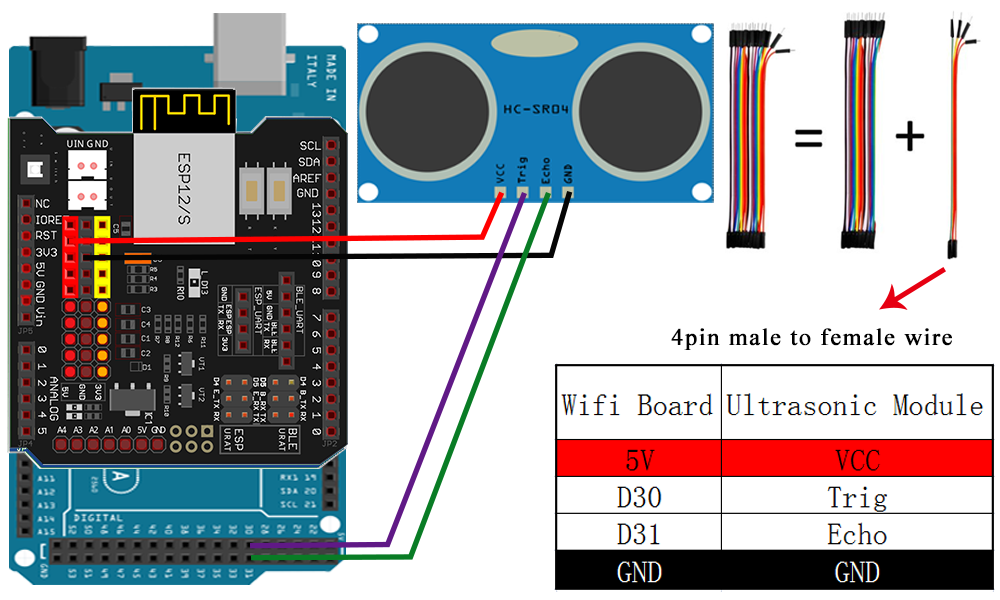
Étape 4 : connectez VCC, Trig, Echo, GND du module à ultrasons à 5 V, D30, D31, GND du bouclier Wi-Fi avec 4 pièces de fils de raccordement mâle-femelle.
(Remarque : vous avez besoin de séparer 4 fils de raccordement mâle-femelle de notre lot de 10 fils de raccordement. N’importe quelle couleur du lot sera correcte. Le reste des fils sont des pièces de rechange pour les fils potentiellement cassés ou endommagés.)
Étape 1 : Installez la dernière version de l’IDE Arduino (si vous disposez d’une version de l’IDE Arduino postérieure à la version 1.1.16, veuillez ignorer cette étape). Téléchargez Arduino IDE à partir de https://www.arduino.cc/en/Main/Software?setlang=en, puis installez le logiciel.
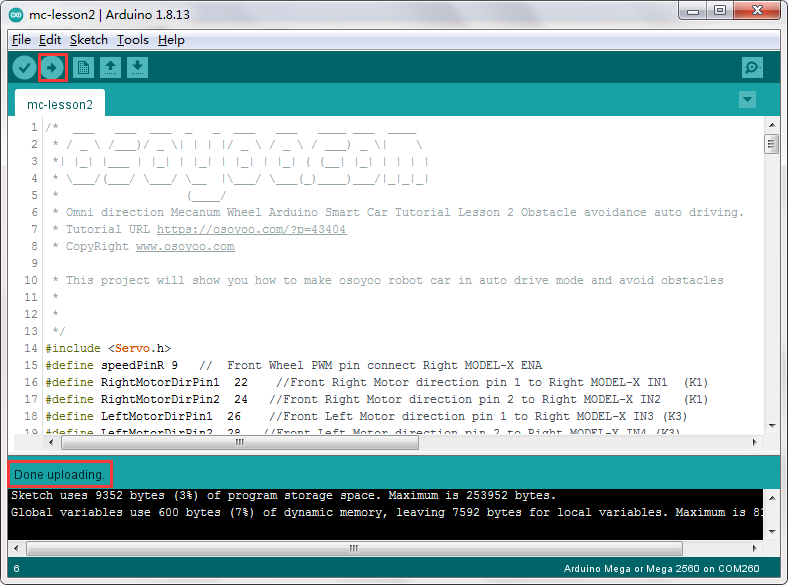
Étape 3 : Connectez la carte Mega2560 au PC avec un câble USB, ouvrez Arduino IDE -> cliquez sur fichier -> cliquez sur Ouvrir -> choisissez le code “m2-lesson2” dans le dossier de la leçon, chargez le code dans Arduino comme suit.
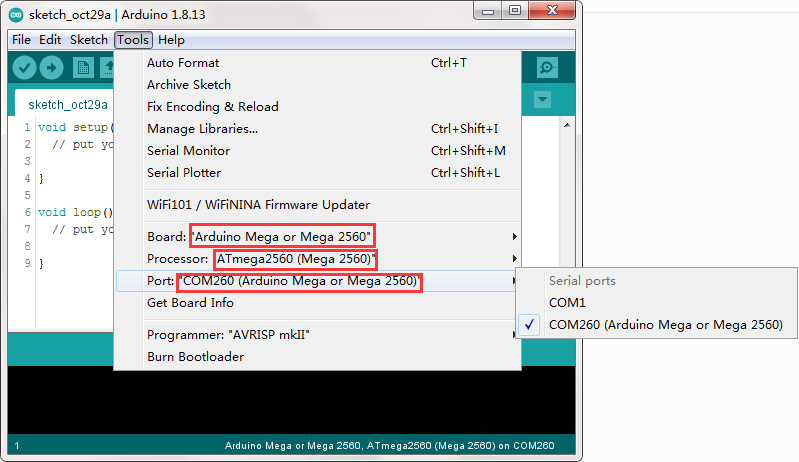
Étape 4 : choisissez la carte/port correspondant à votre projet, téléchargez le croquis sur la carte.
Étape 5: alignement de la direction initiale du servo du capteur à ultrasons
Après avoir allumé la batterie, le servo effectuera un mouvement et s’arrêtera finalement dans une direction pendant 5 secondes.
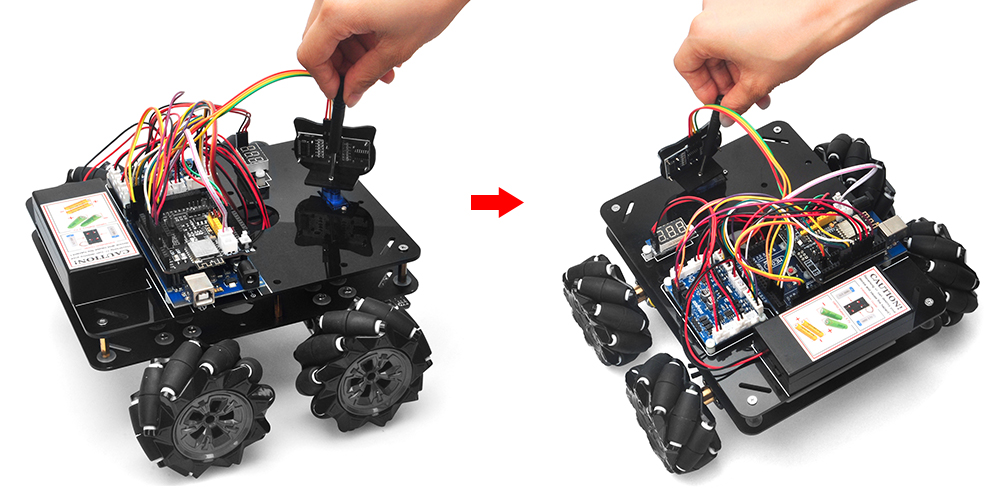
Pendant ces 5 premières secondes, vous devez vous assurer que le capteur à ultrasons (deux yeux) est orienté vers l’avant.
Si ce n’est pas simple, vous devez éteindre la batterie immédiatement et retirer le capteur du servo, le réinstaller et le diriger vers l’avant comme sur l’image suivante. Sinon, le programme d’évitement d’obstacles ne fonctionnera pas correctement.
Après avoir ajusté la direction du capteur, rallumez la batterie. Si sa direction n’est pas simple, éteignez la batterie et recommencez l’alignement de la direction.
Si le module à ultrasons se tourne vers la position de vue de face, cela signifie que vous n’avez plus besoin d’ajuster la position du capteur. Attendez juste 5 secondes. Si aucun obstacle n’est détecté, la voiture avancera. Si des obstacles sont détectés, la voiture s’arrêtera, le module à ultrasons tournera de droite à gauche pour détecter les obstacles environnants. La voiture robot décidera de tourner à gauche, à droite ou en arrière en fonction des données du capteur d’obstacles et de notre algorithme d’évitement d’obstacles.
Parfois, votre voiture peut avoir une collision et faire changer la position de votre capteur à ultrasons, vous devez vous rappeler de refaire l’alignement de la direction du capteur.
La voiture robot décidera de tourner à gauche, à droite ou en arrière en fonction des données du capteur d’obstacles et de notre algorithme d’évitement d’obstacles. Parfois, votre voiture peut avoir une collision et faire changer la position de votre capteur à ultrasons, vous devez vous rappeler de refaire l’alignement de la direction du capteur.
Paramètres importants dans le fichier de croquis
Les paramètres suivants des lignes 35 à 39 de m2-lesson2.ino sont très importants pour ajuster les performances. Voir les commentaires dans les instructions #define :
#define FAST_SPEED 170 //les deux côtés de la vitesse du moteur
#define SPEED 100 //les deux côtés de la vitesse du moteur
#define TURN_SPEED 150 //les deux côtés de la vitesse du moteur
#define BACK_SPEED1 150 //vitesse de retour
#define BACK_SPEED2 100 //vitesse de retour