È possibile scaricare il manuale d’uso da:

In questa esercitazione utilizzeremo due sensori di tracciamento OSOYOO per guidare l’auto a muoversi automaticamente lungo la linea nera del terreno bianco. Il software di questa lezione leggerà i dati dei sensori di tracciamento e guiderà automaticamente l’auto a muoversi lungo la linea nera del terreno bianco.
Un robot Line Follower, come suggerisce il nome, è un veicolo a guida automatica che segue una linea nera stampata sul terreno bianco. I sensori di tracciamento del robot controllano se la posizione attuale dell’auto è fuori dal tracciato. In caso affermativo, l’auto compie un movimento negativo per riportare l’auto robotica sul binario.
Se non riuscite a completare l’inquadratura dell’auto, rivedete la lezione 1


Se non si completa il collegamento dei fili di base, si prega di rivedere la lezione 2.
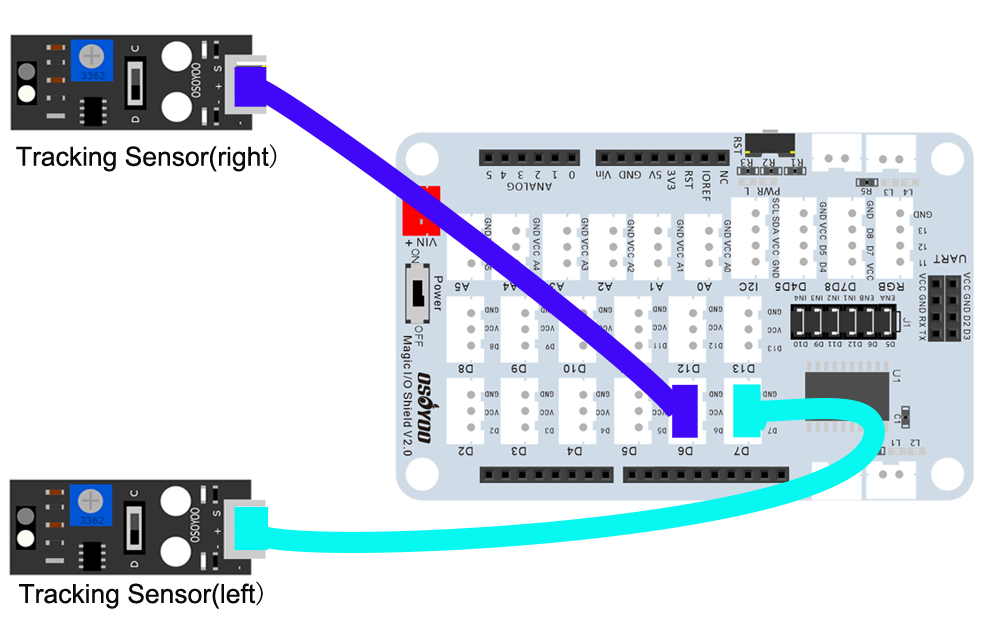
Collegamento:
Sensore di rilevamento sinistro a D7
Sensore di tracciamento destro a D6

FASE 1:
Scaricare https://osoyoo.com/driver/2022008400/lesson3.zip , decomprimerlo e vedere una cartella chiamata lesson3.
FASE 2:
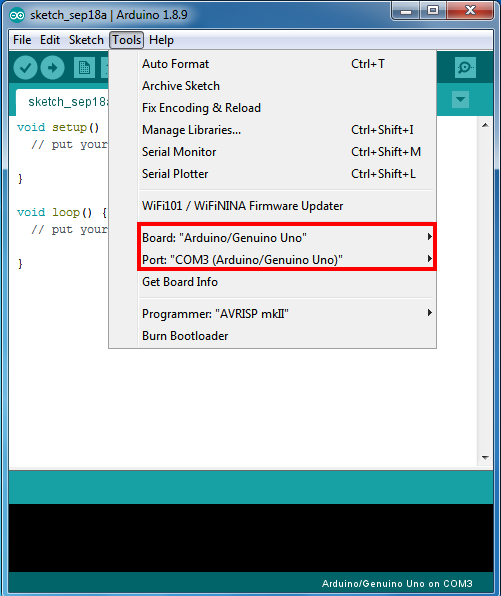
Collegare la scheda UNO R3 al PC con un cavo USB, aprire l’IDE e scegliere la scheda/porta corrispondente al progetto.
Avviso: Spegnere la batteria o scollegare l’adattatore di corrente quando si carica il codice dello sketch sulla scheda di base OSOYOO per Arduino.
FASE 3:
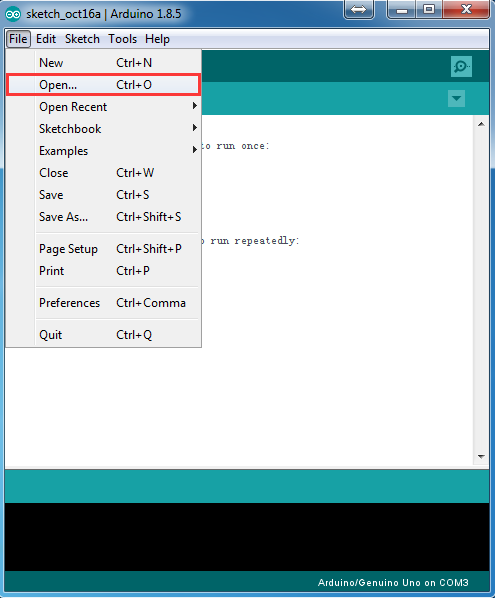
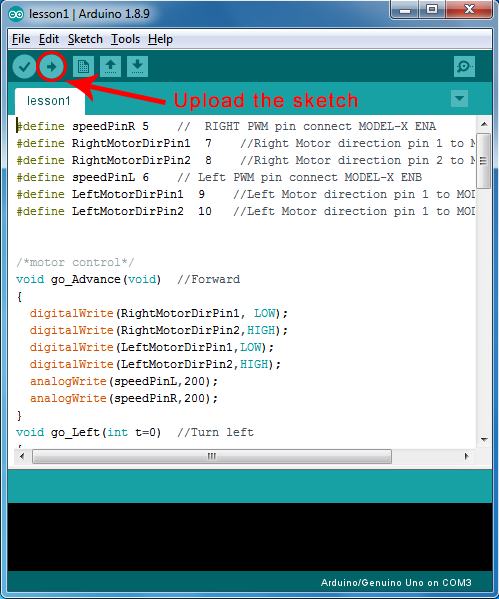
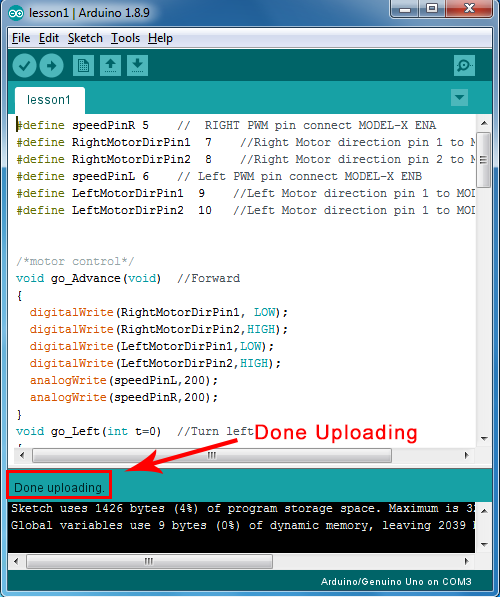
Fare clic su file -> fare clic su Apri -> scegliere il codice “lesson3.ino”, caricare il codice in OSOYOO Basic Board for Arduino e quindi caricare lo sketch sulla scheda.
Avviso: Allineamento del servo
Modificare il valore predefinito 90 nella riga seguente come valore FRONT nell’opzione 2 al passaggio 5 della lezione 2. Se si allinea la direzione della ruota manualmente come opzione 1 nel passaggio 5 della lezione 2, saltare questo passaggio.
#define FRONT 90 // steering to front
FASE 4:
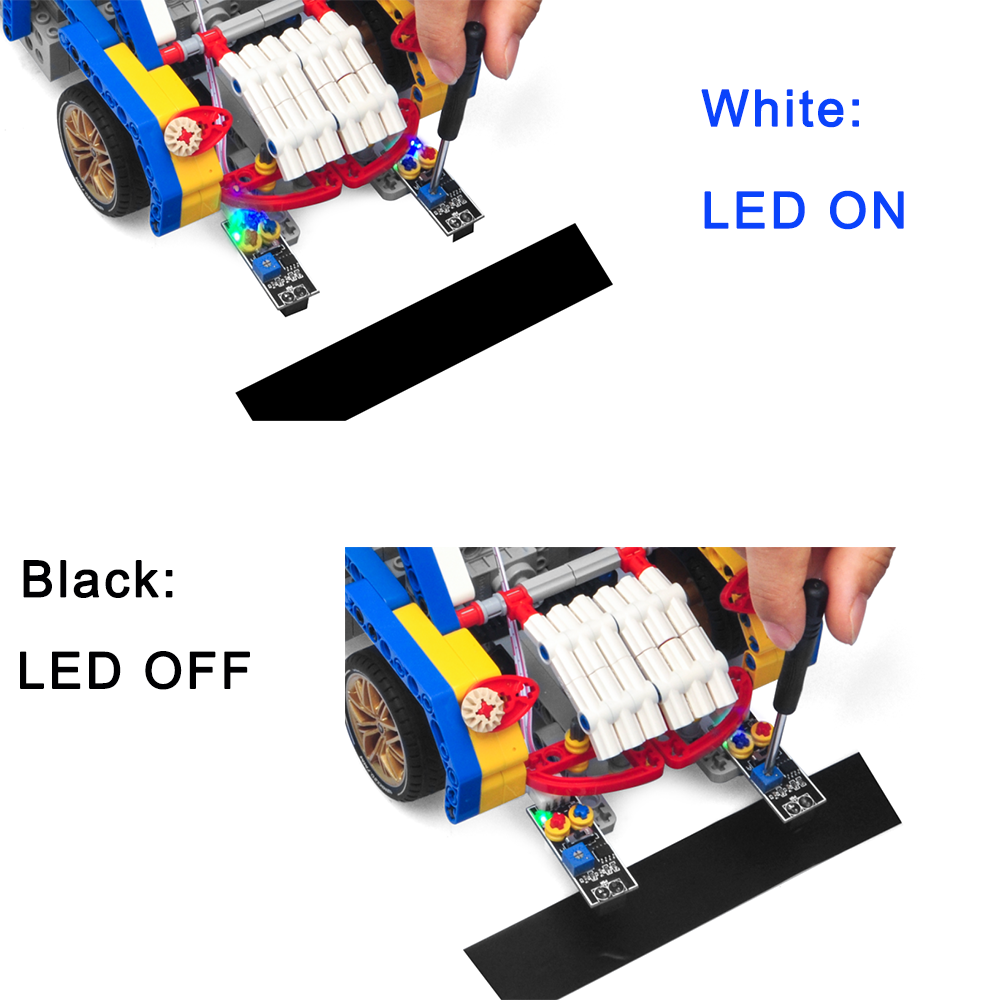
Regolare la sensibilità dei moduli del sensore di tracciamento.
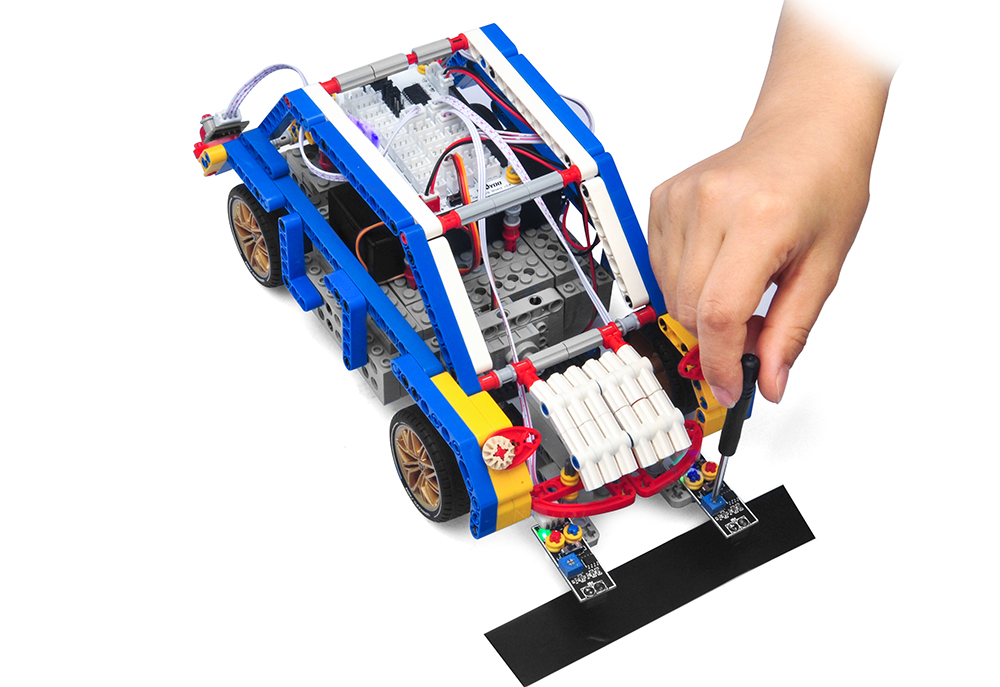
Accendere e tenere accesa la macchina e regolare il potenziometro del sensore di tracciamento con un cacciavite a croce fino a ottenere lo stato di sensibilità migliore: la luce del LED di indicazione del segnale si spegnerà quando il sensore si trova sopra il terreno bianco, mentre il LED di indicazione si accenderà quando il sensore si trova sopra la pista nera.

1. Preparare un binario nero (la larghezza del binario nero è superiore a 20 mm e inferiore a 30 mm) nel terreno bianco. L’angolo di curvatura del binario non può essere superiore a 30 gradi. Se l’angolo è troppo grande, la macchina uscirà dalla pista.
2. Mettere l’auto sul binario, accendere l’interruttore del Motor Shield OSOYOO e l’interruttore della scatola della batteria, l’auto si muoverà lungo il binario nero.
Nota: se l’auto non si muove come indicato sopra, è necessario controllare il collegamento dei fili del sensore di tracciamento e la tensione della batteria (deve essere superiore a 7,2 V).
3. Se si desidera cambiare l’angelo di destra o di sinistra, modificare la riga seguente del codice e caricare nuovamente lo sketch:
int RIGHT=FRONT-70;
int LEFT=FRONT+70;
4. Se si desidera modificare la velocità dell’auto, si prega di rivedere il seguente codice dello sketch (Nota: il valore massimo è 255)
#define SPEED 190
#define HI_SPEED 220