In questa lezione, ti insegneremo come utilizzare un’APP mobile per controllare un’auto robot tramite protocollo UDP. Il Raspberry Pi eseguirà un programma Python per ottenere un pacchetto UDP da APP.
Imparerai come usare Python per ottenere dati remoti (pacchetto UDP) dall’APP mobile.
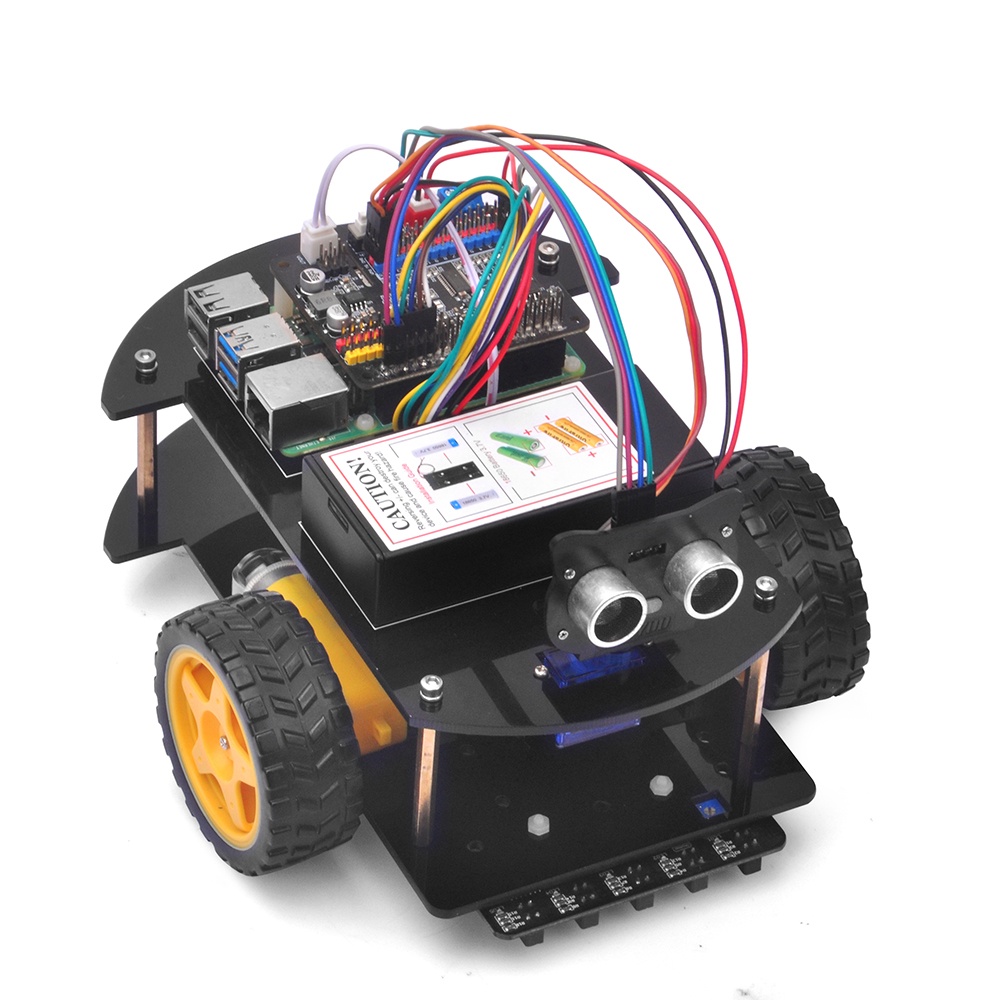
Passo 1: Installa il framework di base dell’auto intelligente come da lezione 3. Se non si installa il modulo sensore di tracciamento, completare l’installazione nella lezione 2.
Passo 1) Assicurati di aver installato rpi.gpio e adafruit-pca9685 library, e abilita I2C nella lezione 1.
Passo 2) Accendi l’auto robot e digita il seguente comando per scaricare il codice di esempio:
Passo 3) Digitare il seguente comando per eseguire il codice di esempio:
python3 picar-udp-control4.py
Dopo che il python sopra è in esecuzione, la tua auto è in attesa di comando dal tuo cellulare.
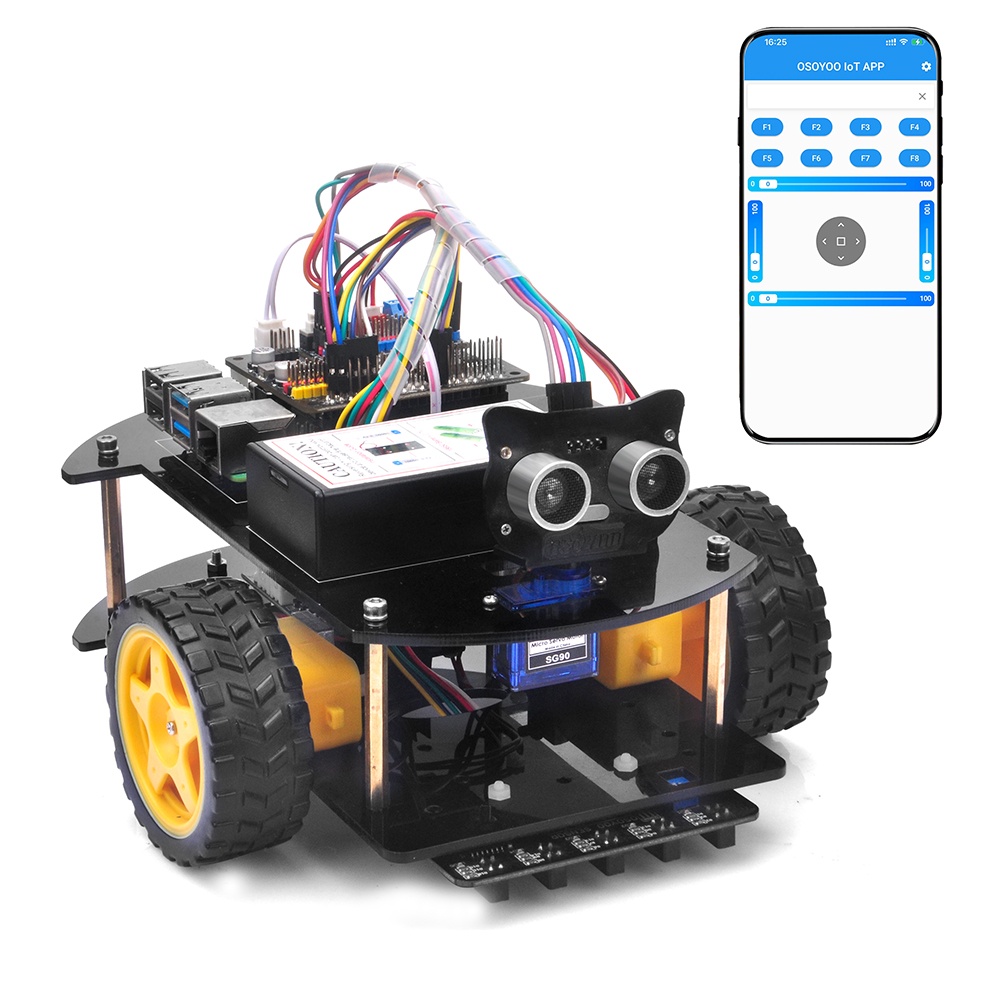
Passo 4) Scarica OSOYOO Wi-Fi UDP Robot Car control APP In Google Play o Apple Store, cerca le parole chiave “OSOYOO IoT UDP Robot APP”, troverai un’icona rossa APP come segue (Nota: se non riuscite a trovare questa APP in Google Play, potete scaricare direttamente l’APP dal seguente link: https://osoyoo.com/driver/udp-app.apk):
Passo 5) Collegare il telefono allo stesso router Wi-Fi SSID del Raspberry Pi. Aprire l’APP, fare clic sull’icona “impostazioni(1)” per accedere all’interfaccia utente, inserire [Raspberry Pi IP address] e [Port] in [8888], fare clic su [Save], quindi fare clic sull’icona indietro(5) per tornare all’interfaccia utente di controllo come segue:
Passo 6)
Ora, metti l’auto a terra e puoi fare clic sui tasti di direzione < > ^ v per far muovere l’auto. Usa || tasto di pausa per fermare il movimento dell’auto.
Se fai clic sul tasto Ostacolo (F8), l’auto eseguirà la guida automatica per evitare gli ostacoli in modo simile alla lezione 3
Se fai clic sul tasto Tracking (F7), l’auto eseguirà il link tracking auto driving simile alla lezione 2
Nota: F1 ~ F6 sono ulteriori funzioni di sviluppo in futuro.
Domande frequenti sull’app IoT UDP e sul codice sketch:
Q1)Come sintonizzare la velocità dell’auto robot? A: Se si desidera modificare le prestazioni di velocità dell’auto robot, modificare i seguenti valori nella riga 19-21 nel file picar-udp-control.py:
high_speed = 4000 # Max pulse length out of 4096
mid_speed = 2000 # Max pulse length out of 4096
low_speed = 1000 # Max pulse length out of 4096
D 2)Cosa succede quando premi i pulsanti in OSOYOO IoT UDP Robot APP ? A: Quando si preme un pulsante dell’APP, l’APP invierà un messaggio di una singola lettera tramite protocollo UDP al dispositivo di destinazione Raspberry Pi
Bottone
Messaggio UDP
F1
/
F2
/
F3
/
F4
/
F5
/
F6
/
▲
Avanzare
▼
Indietro
►
A destra
◄
A sinistra
quadrato
Fermarsi
F7
Inseguimento
F8
ostacolo
Q3)In che modo il programma python Raspberry Pi gestisce il comando UDP?
Le linee da 290 a 318 mentre il ciclo riceve i dati UDP da APP e li danno a cur_status vitali, la funzione ticker nella riga 266 – 280 gestisce il cur_status :
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
Ad esempio, quando viene premuto il tasto APP ▲, cur_status valore è A, quindi la funzione ticker() chiamata in avanti (mid_speed,mid_speed) per far avanzare l’auto.