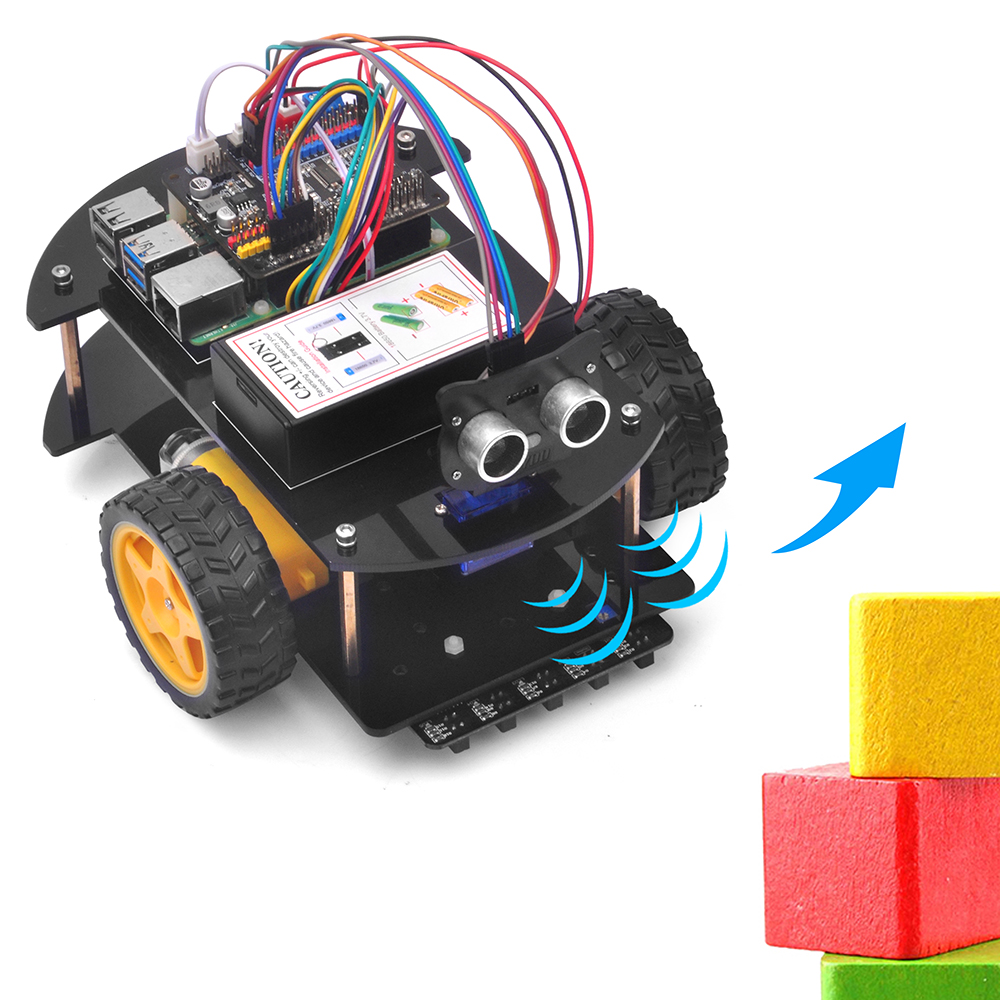
In questa lezione, la nostra auto robot Raspberry Pi utilizzerà il sensore a ultrasuoni per rilevare gli ostacoli e rendere la guida automatica ed evitare collisioni.
I codici di esempio in questa esercitazione sono scritti in Python.
Passo 1: È necessario completare il quadro di base della Lezione 1. Se hai completato l’installazione hardware di lesson2, tienila.
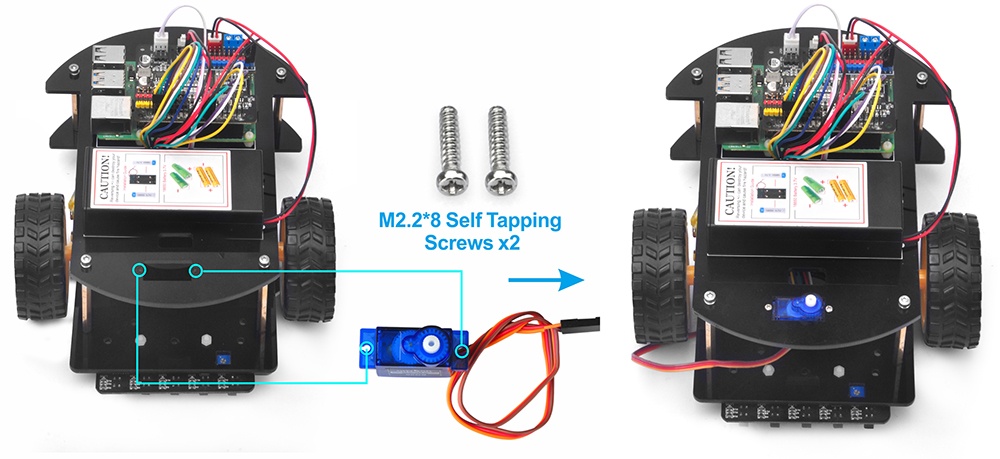
Passo 2: Installare il servomotore nella parte anteriore del telaio superiore dell’auto con viti autofilettanti M2.2 * 8 da 2 pezzi
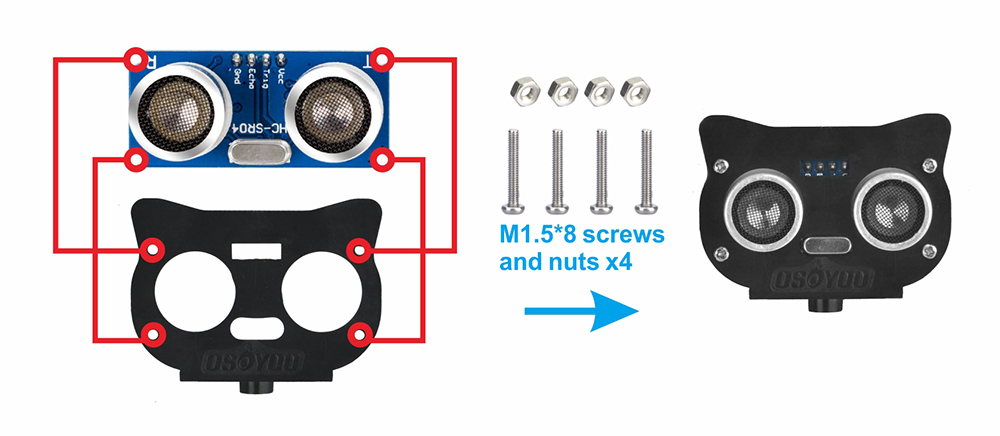
Passaggio 3: Installare il modulo ad ultrasuoni per montare il supporto con vite M1.5*8 da 4 pezzi e dadi M1.5
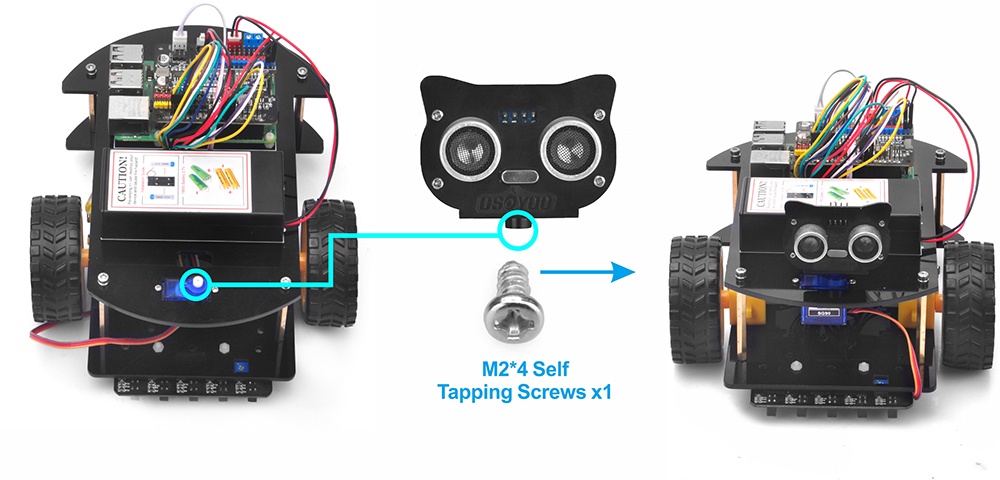
Passaggio 4: Installare il supporto di montaggio per il modulo ad ultrasuoni sul servomotore con vite autofilettante M2 * 4
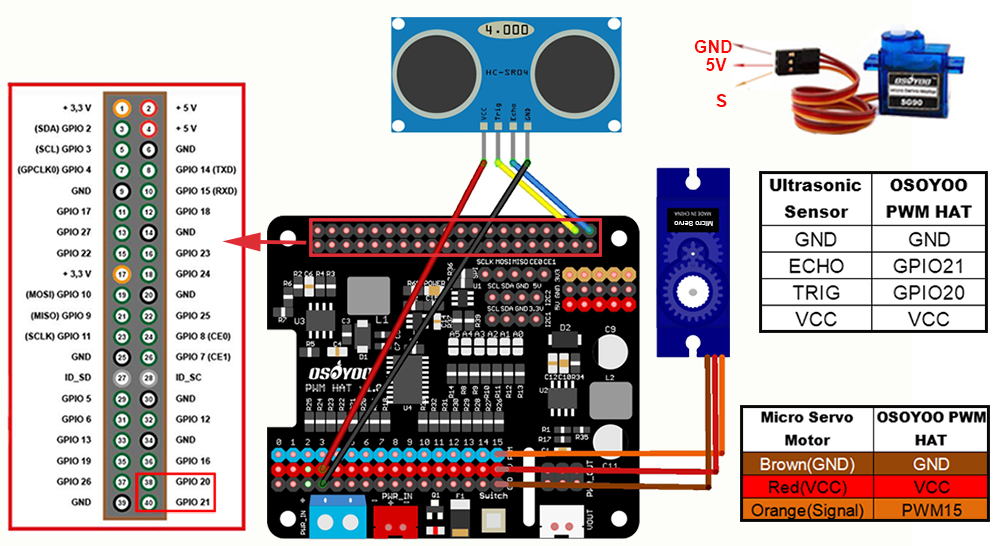
Collegare il servomotore SG90 a PWM 15 e collegare GND e VCC del modulo a ultrasuoni a GND e V+, quindi collegare TRIG e ECHO del modulo a ultrasuoni a GPIO20 e GPIO21 come indicato nel grafico seguente (ricordare: NON rimuovere i fili esistenti installati nella Lezione 1):
Passo 1: Assicurati di aver installato rpi.gpio, la libreria adafruit-pca9685 e abilita I2C nella lezione 1.
Passo 2: Accendi l’auto robot e scarica il codice python digitando il seguente comando nel tuo terminale Raspberry Pi:
Passo 3: Metti l’auto robot a terra ed esegui il programma:
python picar-obstacle-avoid4.py
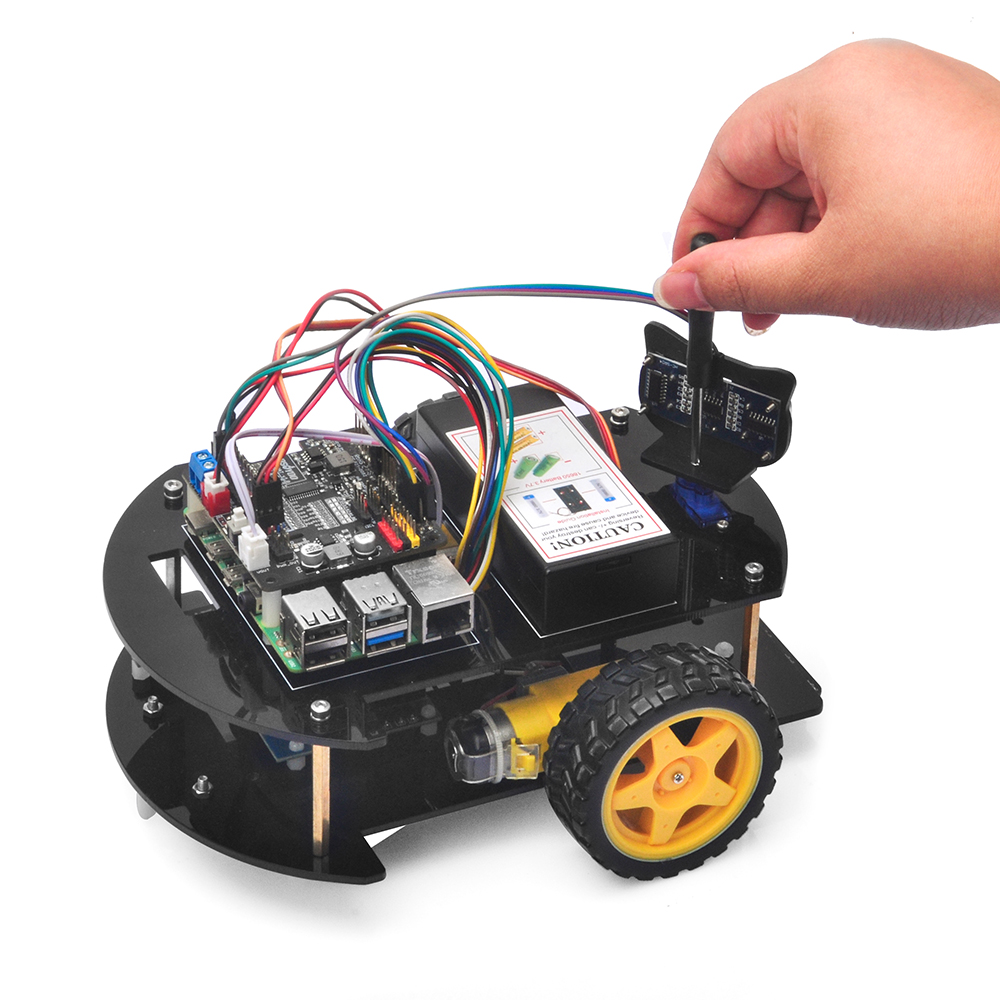
Passo 4: Dopo aver eseguito l’ultimo comando, il servomotore farà sì che il sensore a ultrasuoni sia rivolto a sinistra, poi a destra, quindi al centro e rimanga per alcuni secondi. Se il sensore a ultrasuoni non è rivolto verso la parte anteriore, spegnere immediatamente l’auto robot. Quindi rimuovere il sensore ad ultrasuoni dal servo e reinstallarlo, assicurarsi che sia rivolto verso la parte anteriore e fissarlo con la vite M2 * 4.
Passo 5: Riaccendi l’auto, digita lo stesso comando python picar-obstacle-avoid4.py ed esegui nuovamente il programma. Ora l’auto farà automaticamente evitare gli ostacoli auto guida.