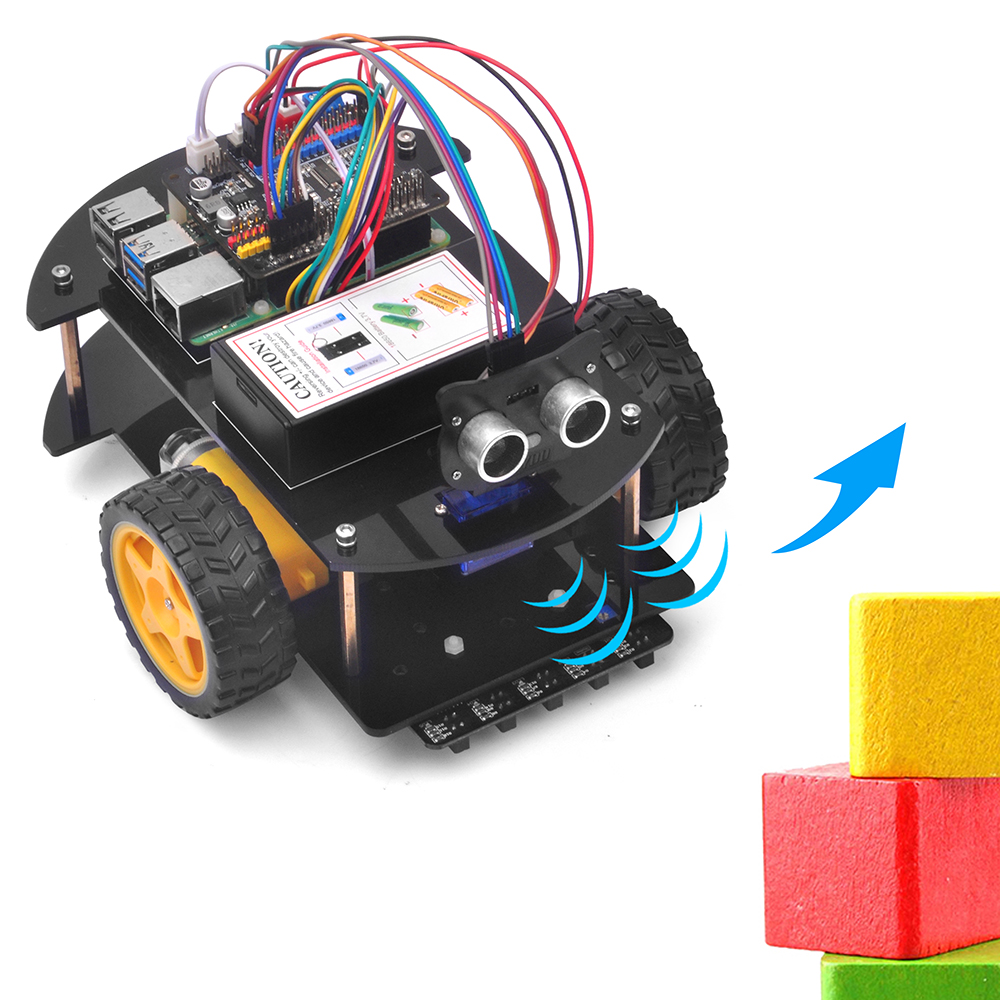
In dieser Lektion verwendet unser Raspberry Pi-Roboterauto einen Ultraschallsensor, um Hindernisse zu erkennen, automatisch zu fahren und Kollisionen zu vermeiden.
Die Beispielcodes in diesem Tutorial sind in Python geschrieben.
Schritt 1: Sie müssen das Grundgerüst von Lektion 1 abschließen. Wenn Sie die Hardware-Installation von lesson2 abgeschlossen haben, bewahren Sie diese bitte auf.
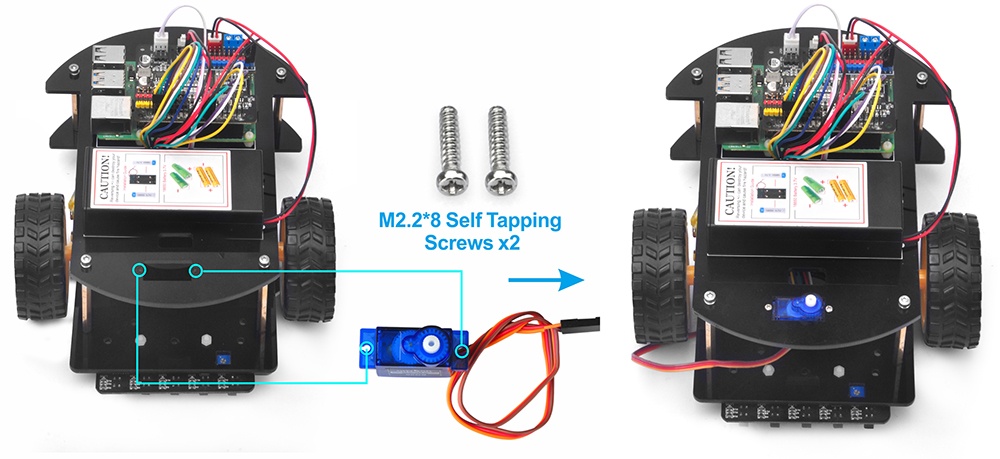
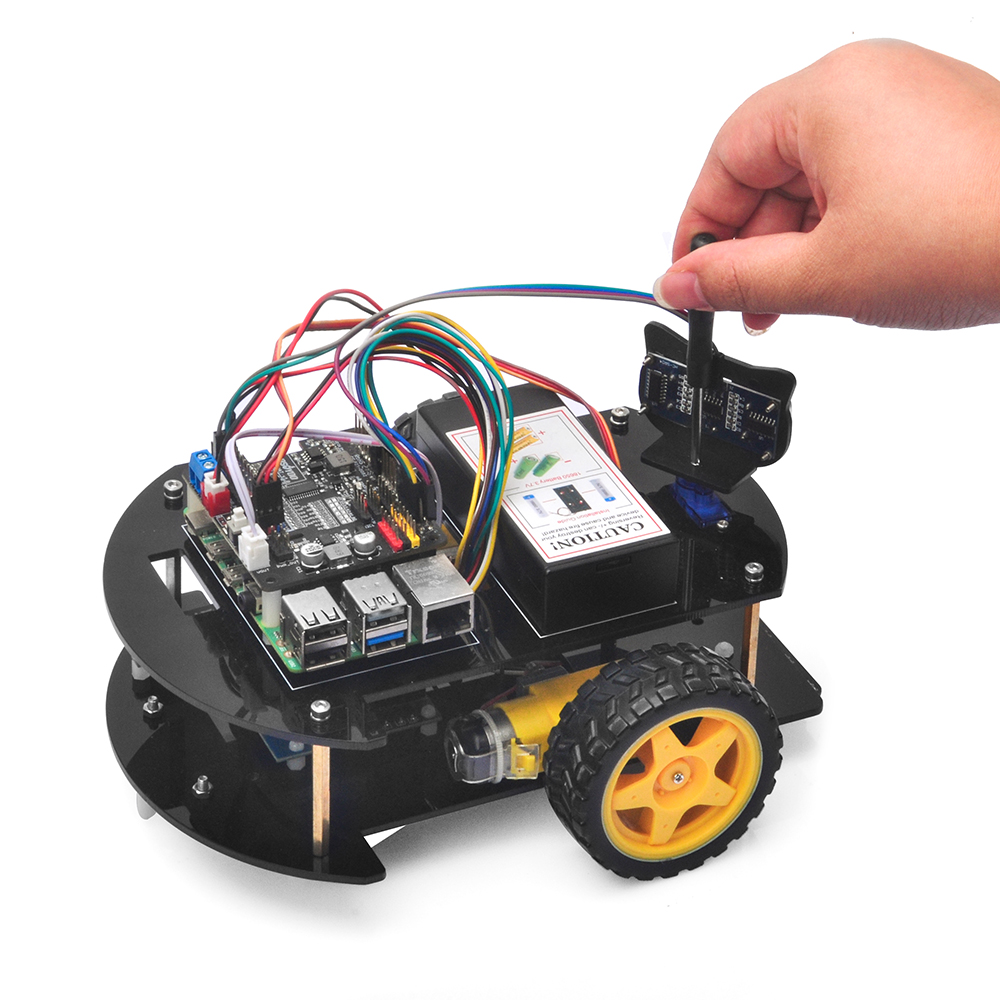
Schritt 2: Installieren Sie den Servomotor an der Vorderseite des oberen Fahrzeugchassis mit 2 Stück M2,2 * 8 selbstschneidenden Schrauben
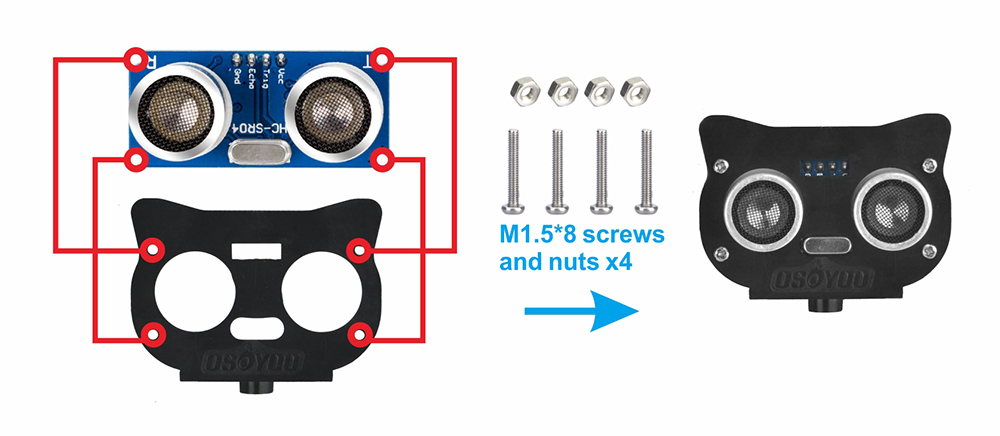
Schritt 3: Installieren Sie das Ultraschallmodul an der Halterung mit 4 Stück M1,5 * 8 Schraube und M1,5 Muttern
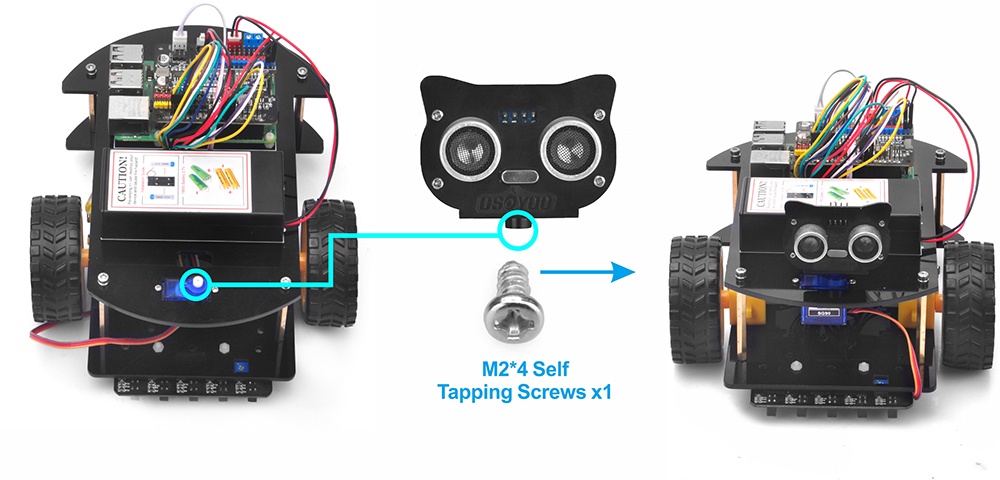
Schritt 4: Montagehalter für Ultraschallmodul am Servomotor mit selbstschneidender M2 * 4-Schraube installieren
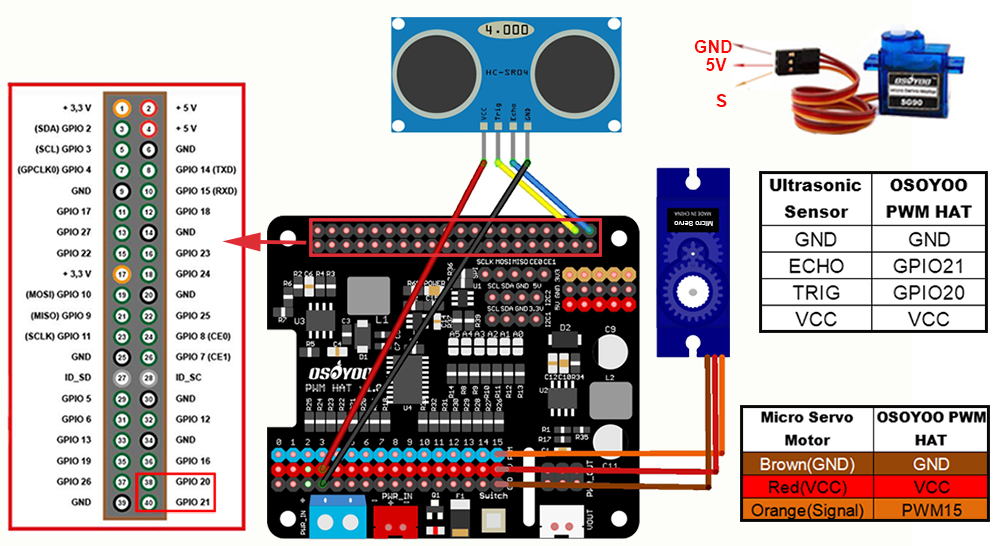
Schließen Sie den SG90-Servomotor an PWM 15 an, und verbinden Sie GND und VCC des Ultraschallmoduls mit GND und V+, dann schließen Sie TRIG und ECHO des Ultraschallmoduls an GPIO20 und GPIO21 an, wie in der folgenden Grafik dargestellt (denken Sie daran: Entfernen Sie KEINE der in Lektion 1 installierten Drähte):
Schritt 1: Stellen Sie sicher, dass Sie rpi.gpio, die Bibliothek adafruit-pca9685 installiert haben, und aktivieren Sie I2C in Lektion 1.
Schritt 2: Schalten Sie das Roboterauto ein und laden Sie den Python-Code herunter, indem Sie den folgenden Befehl in Ihr Raspberry Pi-Terminal eingeben:
Schritt 3: Stellen Sie das Roboterauto auf den Boden und führen Sie das Programm aus:
python picar-obstacle-avoid4.py
Schritt 4: Nach dem Ausführen des letzten Befehls lässt der Servomotor den Ultraschallsensor nach links, dann nach rechts, dann nach Mitte zeigen und einige Sekunden lang bleiben. Wenn der Ultraschallsensor nicht nach vorne zeigt, schalten Sie das Roboterauto bitte sofort aus. Entfernen Sie dann den Ultraschallsensor vom Servo und installieren Sie ihn wieder, stellen Sie sicher, dass er nach vorne zeigt, und befestigen Sie ihn mit einer M2 * 4-Schraube.
Schritt 5: Schalten Sie das Auto wieder ein, geben Sie den gleichen Befehl ein python picar-obstacle-avoid.py und führen Sie das Programm erneut aus. Jetzt wird das Auto automatisch Hindernisvermeidung automatisch fahren.