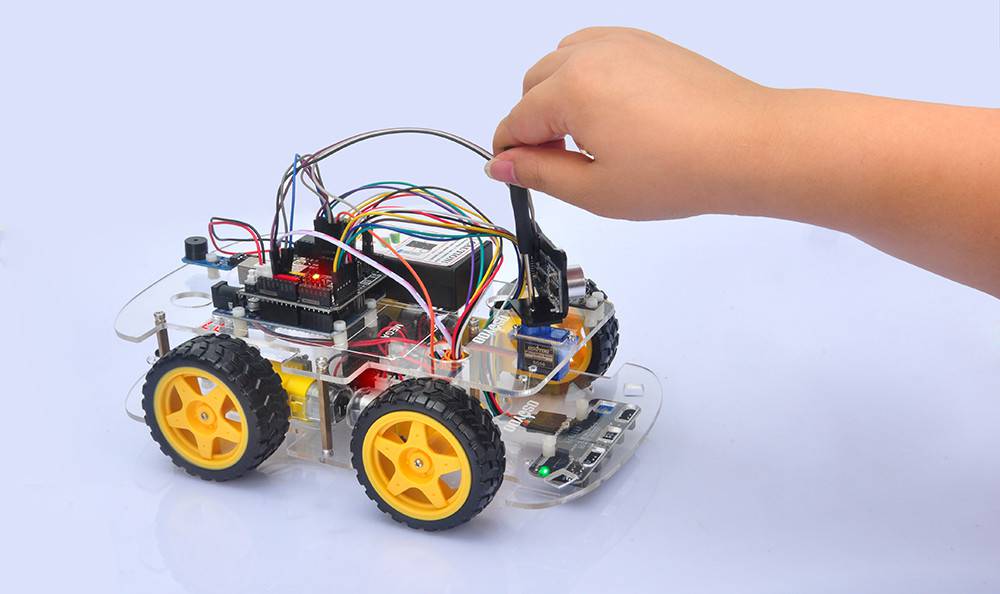
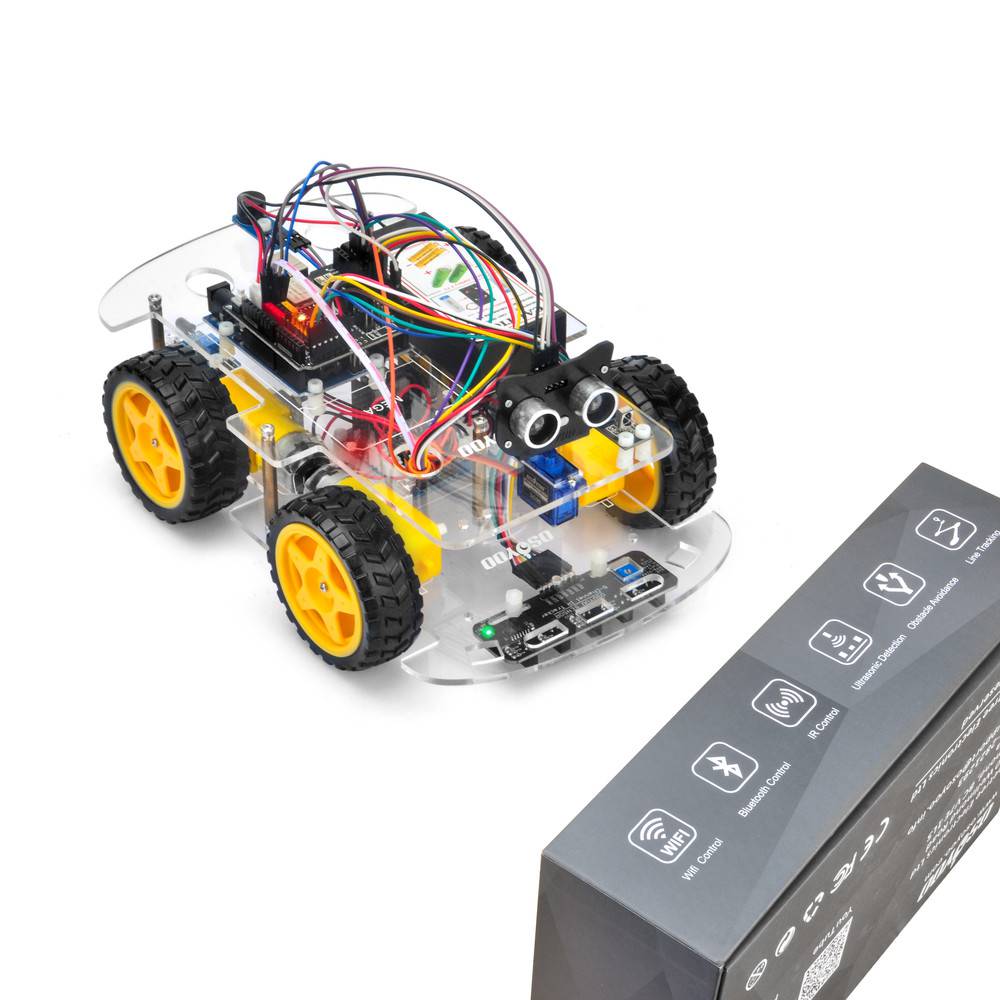
In questa lezione, aggiungeremo un servomotore, un modulo a ultrasuoni e un buzzer al quadro della Lezione 1. Con questi nuovi dispositivi, l’auto può “vedere” un ostacolo attraverso il sensore a ultrasuoni e misurarne la distanza. Se la distanza è inferiore a un valore di soglia predefinito, il cicalino emette un segnale acustico e l’auto si allontana automaticamente dall’ostacolo.
Passo 1: Installate la struttura di base della smart car come indicato nella Lezione 1 sulla smart car. Se si è già completata l’installazione nella Lezione 1, mantenere tutto com’è, tranne spostare l’ENA da D9 a D3 (serve D9 per il controllo del servo). Se avete installato la Lezione 2 o 3, potete rimuovere i fili. Se avete installato la Lezione 4, potete tenerla.
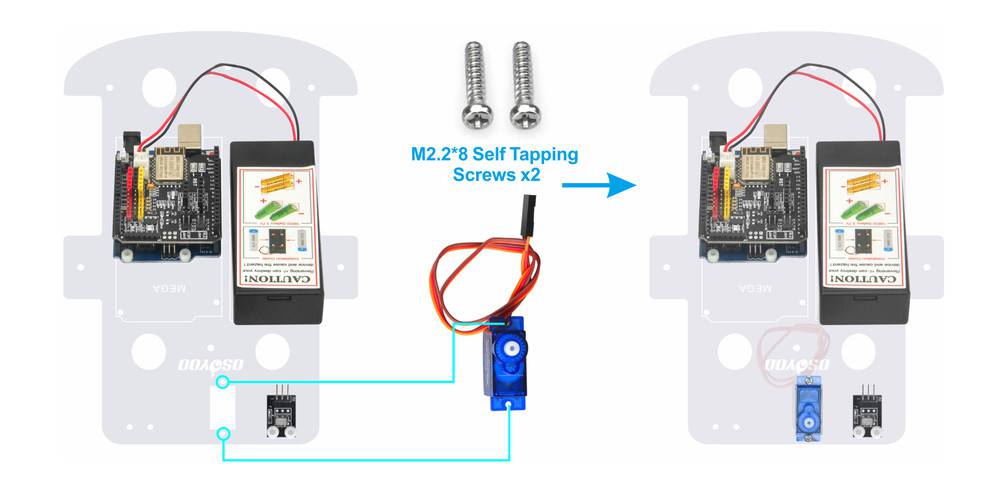
Passo 2: Installare il servomotore nella parte anteriore del telaio superiore dell’auto con 2 viti autofilettanti M2.2*8.
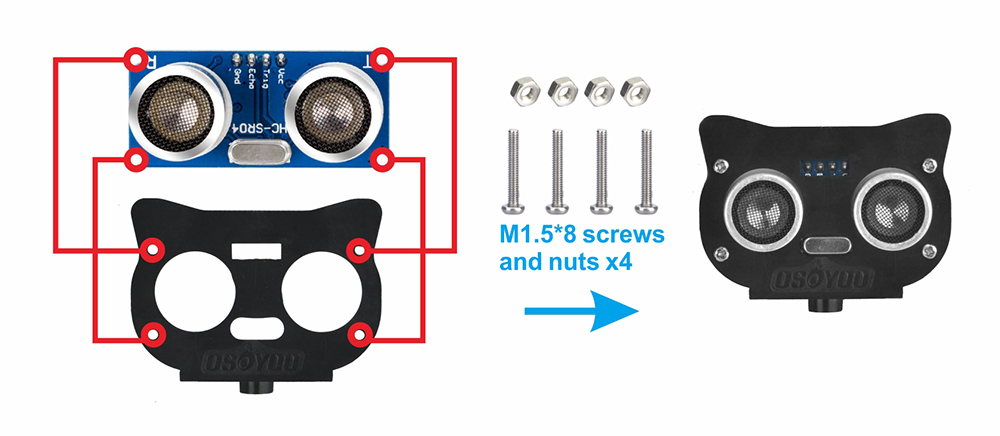
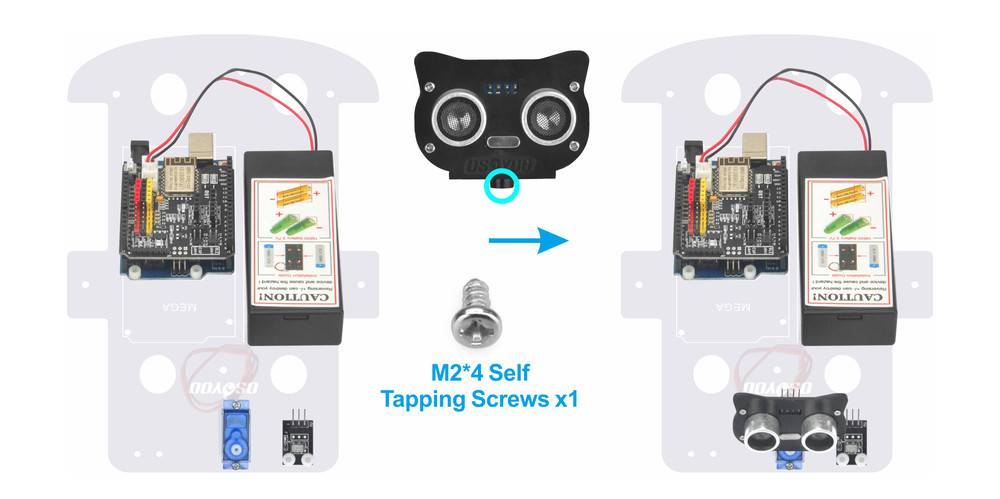
Passo 3: Installare il modulo a ultrasuoni sul supporto di montaggio con 4 pezzi di vite M1,5*8 e dadi M1,5
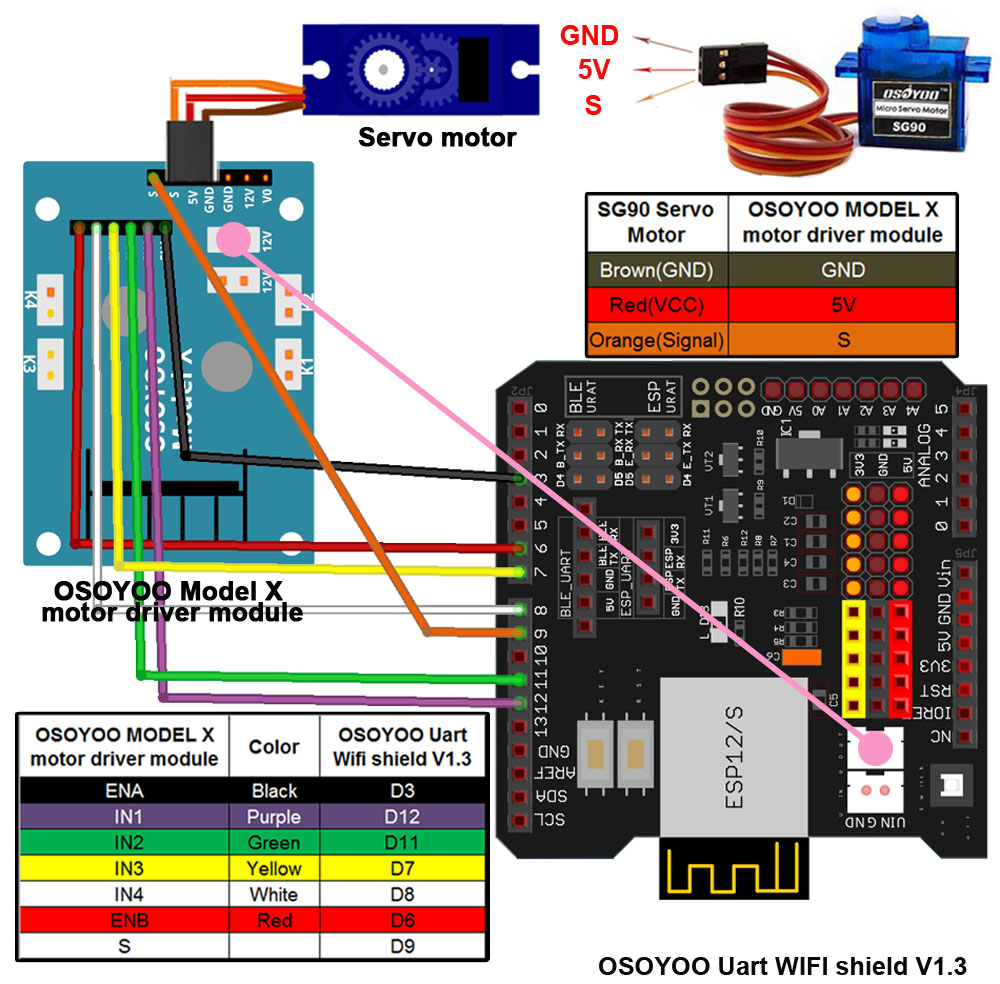
Passo 4: Installare il supporto di montaggio per il modulo a ultrasuoni sul servomotore con una vite autofilettante M2*4. Passo 5: Installare il modulo del cicalino sul retro del telaio superiore con una vite di plastica M3 da 1 pezzo, una colonna di plastica M3 e un dado di plastica M3. Passo 6: Collegare il servomotore SG90, il modulo driver motore OSOYOO MODEL X e lo shield WiFi Uart V1.3 di OSOYOO come indicato di seguito:
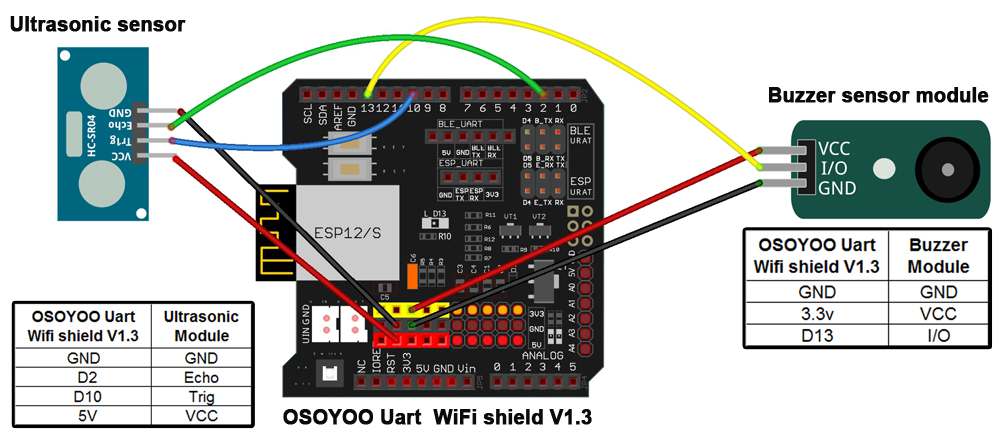
Passo 7: Collegare il modulo a ultrasuoni e il modulo buzzer con lo shield WiFi Uart V1.3 di OSOYOO come indicato nel seguente diagramma di collegamento Passo 8: Fissare le viti sui pilastri in rame per collegare il telaio superiore a quello inferiore, se si rimuovono queste viti.
Passo 1: Installare l’ultimo DE (se si dispone di una versione dell’IDE successiva alla 1.1.16, saltare questo passaggio). Scaricare l’IDE da https://www.arduino.cc/en/Main/Software?setlang=en , quindi installare il software.
Passo 2:Scaricare il codice di esempio da https://osoyoo.com/driver/v2smartcar-lesson5.zip , Decomprimere il file zip smartcar-lesson5.zip, per visualizzare una cartella chiamata v2smartcar-lesson5. .
Passo 3: Collegare Arduino UNO al PC con un cavo USB, aprire Arduino IDE -> fare clic su file -> fare clic su Open -> scegliere il codice “v2smartcar-lesson5.ino” nella cartella smartcar-lesson5, caricare il codice in Arduino. (Avviso: Spegnere l’alimentazione a batteria quando il robot è collegato a un personal computer o a un computer portatile tramite cavo USB.)
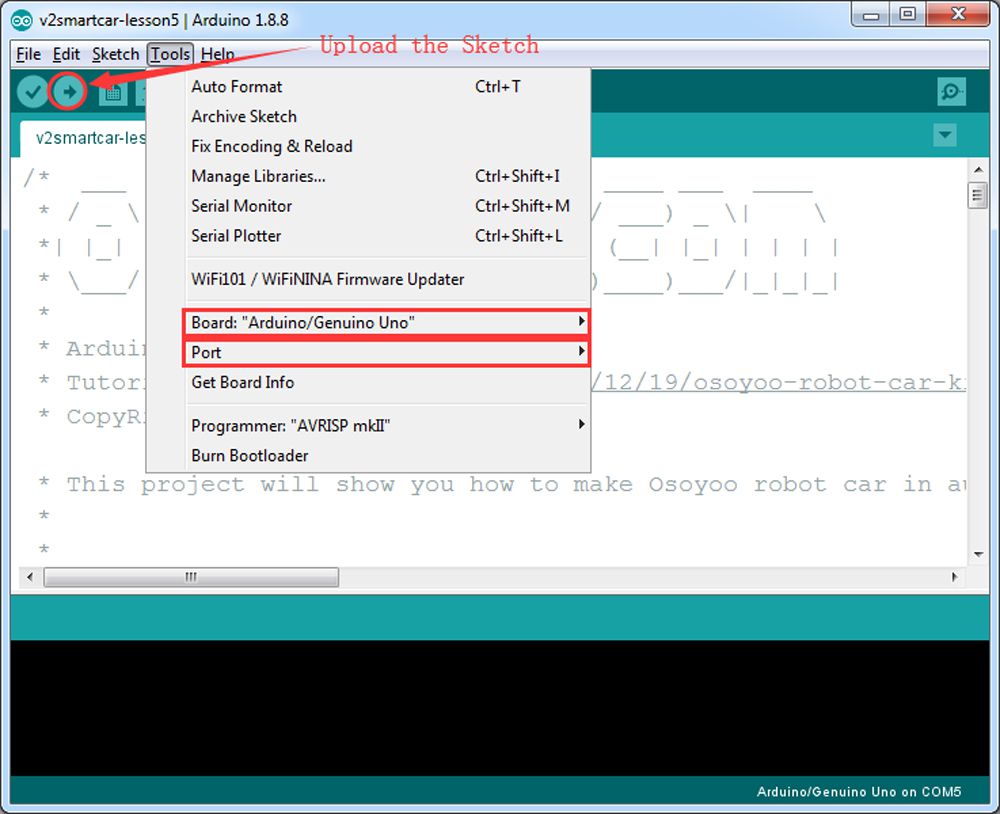
Passo 4: Scegliere la scheda/porta corrispondente al progetto, caricare lo sketch sulla scheda.
Passo 5:Allineamento iniziale della direzione del servo sensore a ultrasuoni
Dopo aver acceso la batteria, si udirà un lungo segnale acustico, quindi il servo compie un movimento e infine si ferma in una direzione per 5 secondi.
Durante i primi 5 secondi, è necessario assicurarsi che il sensore a ultrasuoni (due occhi) sia rivolto in avanti.
Se non è dritto in avanti, è necessario spegnere immediatamente la batteria e rimuovere il sensore dal servo, reinstallarlo e farlo andare dritto in avanti come nell’immagine seguente. In caso contrario, il programma di evitamento degli ostacoli non funzionerà correttamente.
Dopo aver regolato la direzione del sensore, riaccendere la batteria. Dopo aver udito il segnale acustico prolungato, il sensore deve essere rivolto verso la parte anteriore come nell’immagine seguente. Se la direzione non è diretta in avanti, spegnere la batteria e ripetere l’allineamento della direzione.
Test:
Dopo aver acceso l’interruttore della batteria sulla scatola della batteria, se il modulo a ultrasuoni si sposta in posizione frontale, significa che non è più necessario regolare la posizione del sensore. È sufficiente attendere 5 secondi. Se non viene rilevato alcun ostacolo, l’auto procede. Se viene rilevato un ostacolo, l’auto si ferma, il modulo a ultrasuoni gira da destra a sinistra per rilevare l’ostacolo circostante. L’auto robot deciderà di svoltare a sinistra, a destra o all’indietro in base ai dati del sensore di ostacoli e al nostro algoritmo di evitamento degli ostacoli.
Passo 2) Decomprimere il file di cui sopra ed eseguire il file servo.ino nell’auto.
Il servo si sposta da sinistra a destra e infine si ferma in posizione centrale. Se il sensore a ultrasuoni non è rivolto verso la direzione anteriore. Sganciare il sensore a ultrasuoni dalla testa del servo, riposizionarlo in direzione anteriore, quindi fissare la vite del sensore per fissarne la direzione. Vedere il video da 7:4 a 8:10
Passo 3) Dopo aver modificato la direzione del sensore, eseguire nuovamente lo schizzo v2smartcar-lesson5.ino. L’auto comincerà a guidare per evitare gli ostacoli.
You can change the following code to adjust the speed:
#define BUZZ_PIN 13
#define FAST_SPEED 250 //both sides of the motor speed
#define SPEED 120 //both sides of the motor speed
#define TURN_SPEED 200 //both sides of the motor speed
#define BACK_SPEED1 255 //back speed
#define BACK_SPEED2 90 //back speed
How to make the car not to stop every LPT cycle and let it move continously. I delete every stop_Stop function from the watchsurround function but it still does it? Please I need help. Thanks
After the robot car is stopped, it detects whether there are obstacles in different directions through the servo and ultrasonic sensors, so that the robot can bypass the obstacles on its way forward.
Hi, when I want to move the black wire from D9 to D3, I see that D3 is taken by another wire, specifically the Out (left) wire of the IR Obstacle Avoidance Module from lesson 3. Where should I move the black wire?
Hi Elaine,
Lesson 5. I have removed wires from Lessons 2 & 3.
The robot only moves 3 or 4cms at a time but does not run when well away fro object. I have reduced te distance in the code to 10 but this has not made any difference. What is my problem?
Jim.
What do you mean “The robot only moves 3 or 4cms at a time but does not run when well away fro object” ? Can you send a short video about your current running result. our support email is [email protected]
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Do you have Youtube account? Please upload the video to Youtube and send the link to us.
Do you mean the car will detect the object for long distance?
Please check whether the wires on Ultrasonic sensor? whether the echo and Trig are cross wrong?
buzzer might be defective. If you want , you can send your order number and address to [email protected] and ask for a new buzzer replacement. Actually buzzer is not quite important, you can keep doing other lessons without buzzer and test lesson 5 after you get new buzzer.
Hi Elaine,
the car behaves strangely. It measures the distance to an obstacle correctly and shows it in the serial monitor, but it never goes forward. It either runs backwards or turns in circles.
How do you know the distance to obstacle showing correctly? If the aar always moving back or turning arround, it means the sensor didn’t send proper obstacle signal to Arduino. there is a simple way to test your ultrasonic sensor obstacle detection function is good or bad.
1)Run v2smartcar-lesson5.ino, do not turn on the battery, keep the USB cable connecting Arduino board and your computer. The car’s ultrasonic sensor will rotate but car won’t move.
2)Open Serial monitor , face the car to any direction which as obstacle(for example, your PC screen), then Serial monitor should show something like:
begin str=00100 or begin str=01100 , which tells that in center direction has some obstacles (0 stands for non-obstacle, 1 stands for obstacle , from left to right 5 digits means the obstacle situation from far left , left, center, right, far right).
If you face the car to an area which has no obstacle, it should show 00000 which means no obstacles in 5 directions, then car will move forward. However, if you got 11111 even your car has no obstacles in front, your sensor connection to Arduino must have some problem.
one of the 4 wires which connect your obstacle sensor to Arduino UNO board is either broken or wrongly connected, check following picture:
Please use 4 pcs new wires to reconnect the 4 wires in ultrasonic sensor(GND, Echo,Trig,VCC) to Arduino GND,D2,D10,5V again. It will solve your problem.

























How to make the bot move faster instead of stopping every second?
You can change the following code to adjust the speed:
#define BUZZ_PIN 13
#define FAST_SPEED 250 //both sides of the motor speed
#define SPEED 120 //both sides of the motor speed
#define TURN_SPEED 200 //both sides of the motor speed
#define BACK_SPEED1 255 //back speed
#define BACK_SPEED2 90 //back speed
Elaine
How to make the car not to stop every LPT cycle and let it move continously. I delete every stop_Stop function from the watchsurround function but it still does it? Please I need help. Thanks
After the robot car is stopped, it detects whether there are obstacles in different directions through the servo and ultrasonic sensors, so that the robot can bypass the obstacles on its way forward.
I don’t know what your code looks like, and I don’t quite understand your purpose of doing this. Can you post your code?
It is normal for the Model X motor driver to flash when only Uno’s board is powered?
Please check the wiring and then check the battery status of the robot
Hi, when I want to move the black wire from D9 to D3, I see that D3 is taken by another wire, specifically the Out (left) wire of the IR Obstacle Avoidance Module from lesson 3. Where should I move the black wire?
Hi, you need to remove the wires of lesson2 and lesson3, when you test the lesson 4 and 5.
Can someone explain to me what this part of the code in the watch() function means?
digitalWrite(Trig_PIN,LOW);
delayMicroseconds(5);
digitalWrite(Trig_PIN,HIGH);
delayMicroseconds(15);
digitalWrite(Trig_PIN,LOW);
echo_distance=pulseIn(Echo_PIN,HIGH);
I think we need to measure the delay of the pulse to know the distance, but it looks like just measuring the pulse width which is fixed to be 15 μs.
Hi Elaine,
Lesson 5. I have removed wires from Lessons 2 & 3.
The robot only moves 3 or 4cms at a time but does not run when well away fro object. I have reduced te distance in the code to 10 but this has not made any difference. What is my problem?
Jim.
hi, James,
What do you mean “The robot only moves 3 or 4cms at a time but does not run when well away fro object” ? Can you send a short video about your current running result. our support email is [email protected]
Thanks
John @osoyoo support team
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Do you have Youtube account? Please upload the video to Youtube and send the link to us.
Do you mean the car will detect the object for long distance?
Please check whether the wires on Ultrasonic sensor? whether the echo and Trig are cross wrong?
The M2.2 * 8 screws do not actually attach the motor to the chassis, the chassis’s holes are too big so the motor just moves around
Hi Elaine
I have now reached Lesson 5. It works OK except the buzzer does not make sound. Wiring is OK
Any suggestions?
Regards, James.
buzzer might be defective. If you want , you can send your order number and address to [email protected] and ask for a new buzzer replacement. Actually buzzer is not quite important, you can keep doing other lessons without buzzer and test lesson 5 after you get new buzzer.
Hi Elaine,
Thanks fort your attention. I will not bother with the buzzer. I have now completed all lessons.
Regards, James.
olá eu montei o carrinho todo mas quando ligo o senssor ultrassonico ele começa a dar um beep constatente sem parar o que que eu faço?
you can remove that buzzer. it is not a necessary part.
Hi Elaine,
the car behaves strangely. It measures the distance to an obstacle correctly and shows it in the serial monitor, but it never goes forward. It either runs backwards or turns in circles.
How do you know the distance to obstacle showing correctly? If the aar always moving back or turning arround, it means the sensor didn’t send proper obstacle signal to Arduino. there is a simple way to test your ultrasonic sensor obstacle detection function is good or bad.
1)Run v2smartcar-lesson5.ino, do not turn on the battery, keep the USB cable connecting Arduino board and your computer. The car’s ultrasonic sensor will rotate but car won’t move.
2)Open Serial monitor , face the car to any direction which as obstacle(for example, your PC screen), then Serial monitor should show something like:
begin str=00100 or begin str=01100 , which tells that in center direction has some obstacles (0 stands for non-obstacle, 1 stands for obstacle , from left to right 5 digits means the obstacle situation from far left , left, center, right, far right).
If you face the car to an area which has no obstacle, it should show 00000 which means no obstacles in 5 directions, then car will move forward. However, if you got 11111 even your car has no obstacles in front, your sensor connection to Arduino must have some problem.
Hope this helps.
my robot shows an obsticle to the center of it, even if there is not one ther, like 00100
one of the 4 wires which connect your obstacle sensor to Arduino UNO board is either broken or wrongly connected, check following picture:

Please use 4 pcs new wires to reconnect the 4 wires in ultrasonic sensor(GND, Echo,Trig,VCC) to Arduino GND,D2,D10,5V again. It will solve your problem.