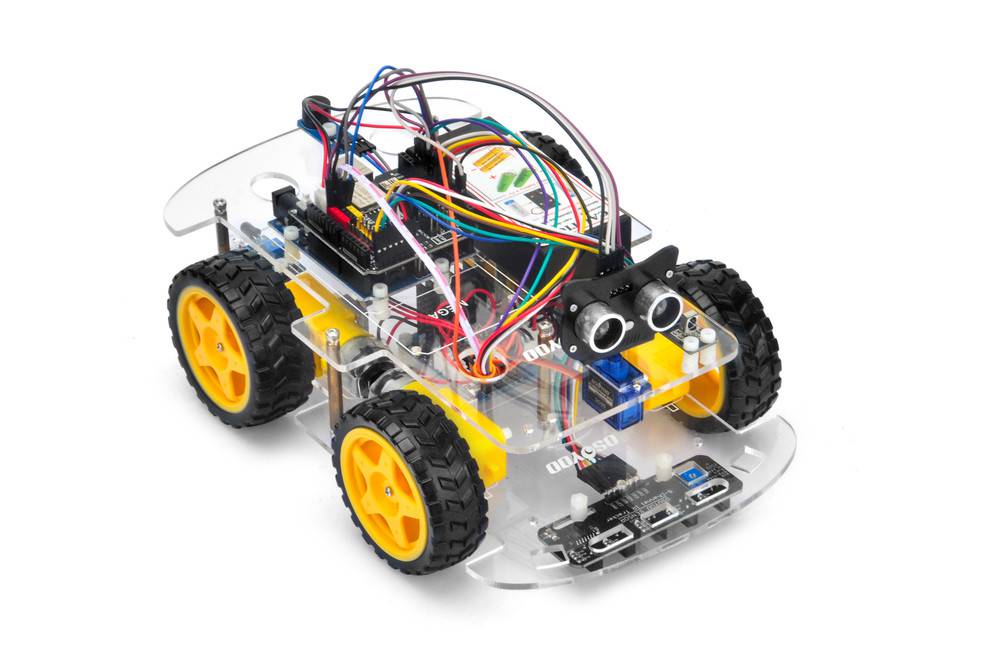
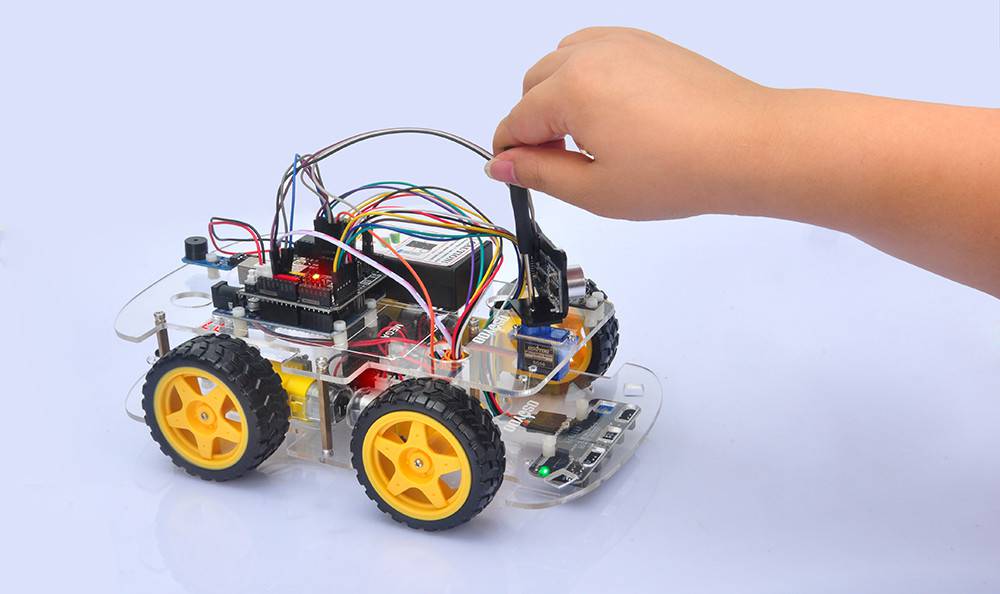
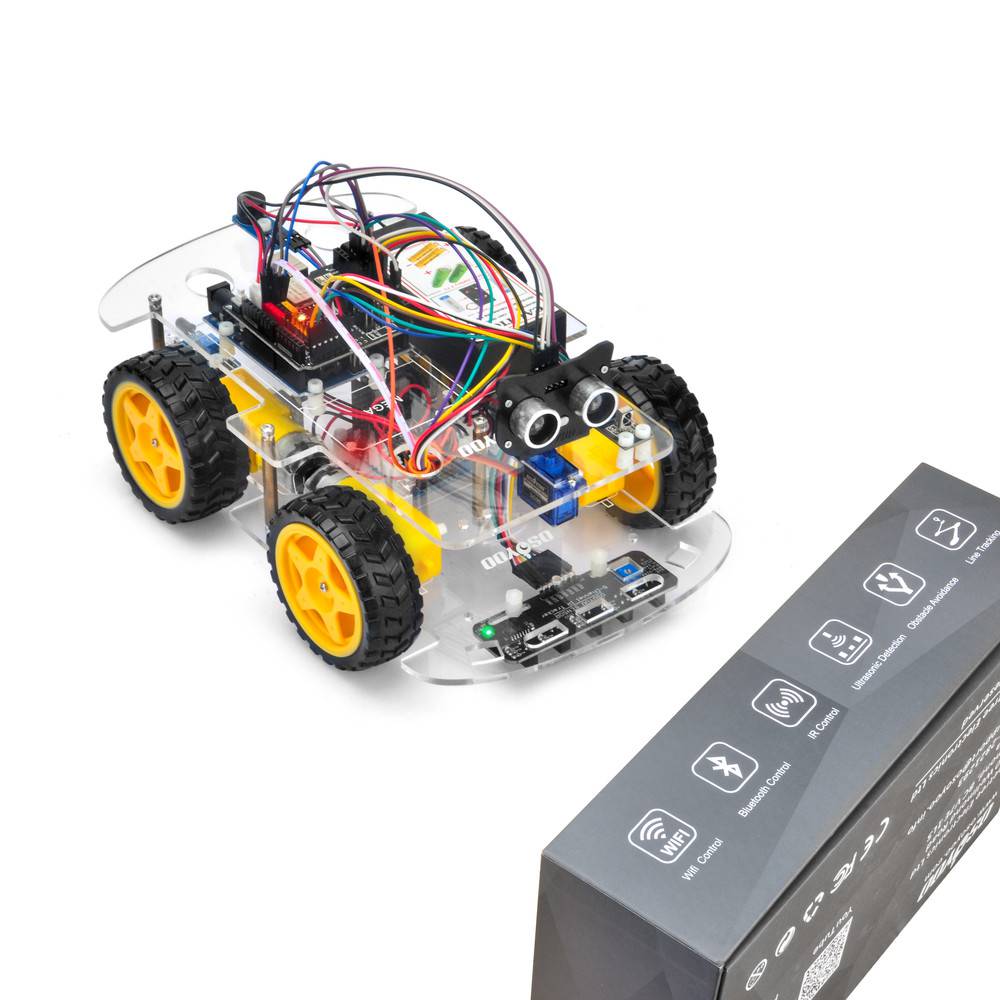
In dieser Lektion, werden wir einen Servomotor, ein Ultraschallmodul und einen Summer in das Gerüst der Lektion 1 einbauen. Mit diesen neuen Geräten kann das Auto Hindernisse durch den Ultraschallsensor “sehen” und die Entfernung messen. Wenn der Abstand kleiner als der vordefinierte Schwellenwert ist, ertönt der Summer und das Auto wendet automatisch vor dem Hindernis.
Schritt 1: Installieren Sie das Smart Car Grundgerüst wie in Smart Car Lektion 1beschrieben .Wenn Sie die Installation in Lektion 1 bereits abgeschlossen haben, lassen Sie alles so, wie es ist, außer dass Sie ENA von D9 nach D3 verschieben (wir brauchen D9 für die Servosteuerung). Wenn Sie Lektion 2 oder 3 installiert haben, können Sie die Drähte entfernen.Wenn Sie Lektion 4 installiert haben, können Sie sie behalten.
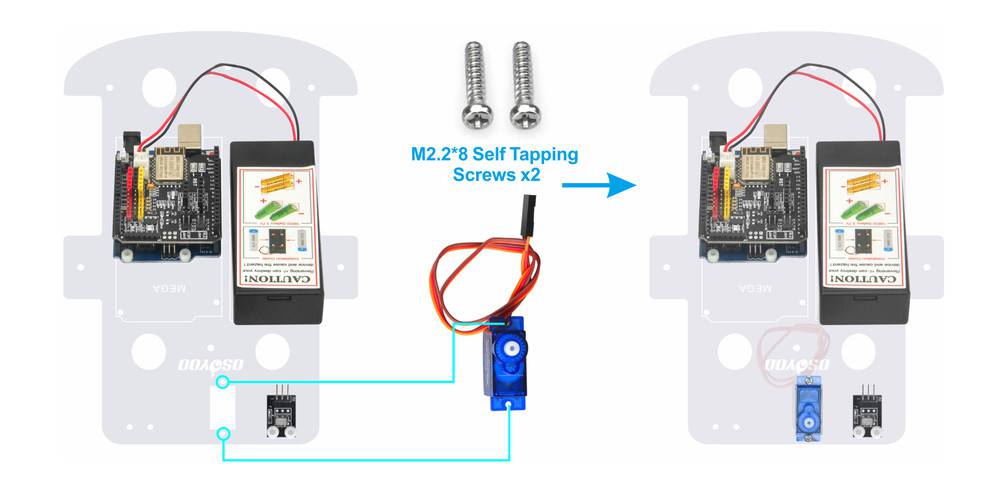
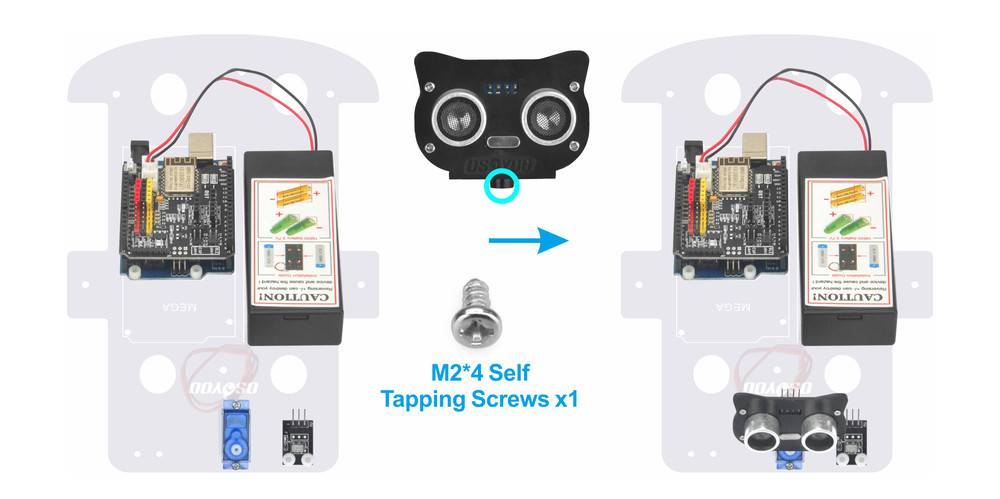
Schritt 2: Installieren Sie den Servomotor an der Vorderseite des oberen Fahrgestells mit 2 Stück M2.2*8 selbstschneidenden Schrauben
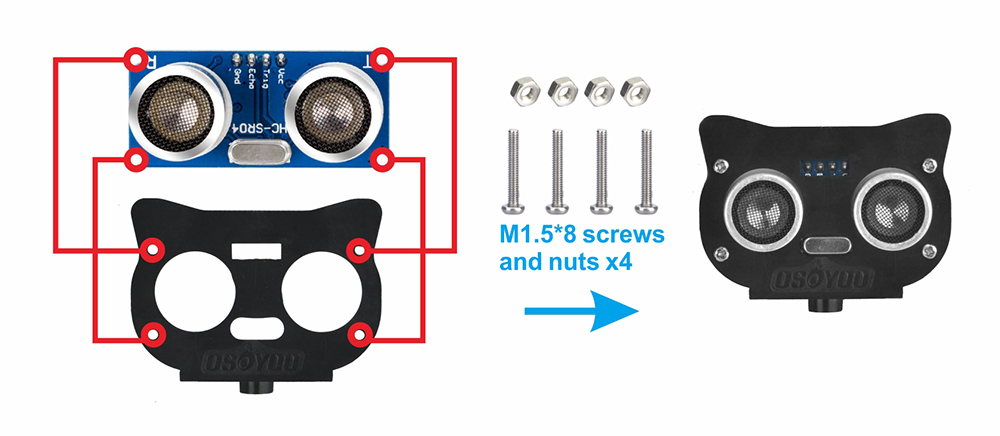
Schritt 3: Befestigen Sie das Ultraschallmodul mit 4 Stück M1,5*8 Schrauben und M1,5 Muttern an der Halterung.
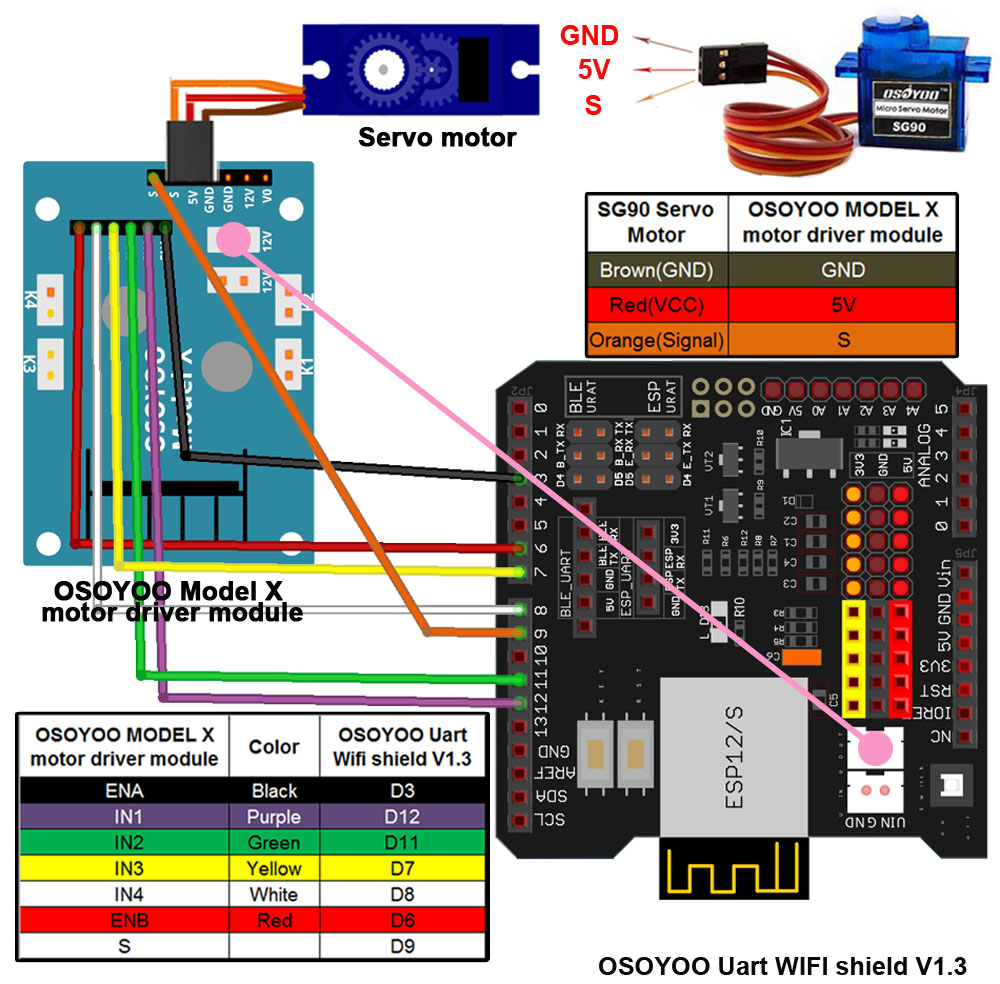
Schritt 4: Montieren Sie die Halterung für das Ultraschallmodul mit einer selbstschneidenden Schraube M2*4 am Servomotor. Schritt 5: Installieren Sie das Buzzer-Modul auf der Rückseite des oberen Gehäuses mit einer M3-Plastikschraube, einer M3-Plastiksäule und einer M3-Plastikmutter. Schritt 6: Schließen Sie den SG90 Servomotor, das OSOYOO MODEL X Motortreibermodul und das OSOYOO Uart WiFi Shield V1.3 wie folgt an:
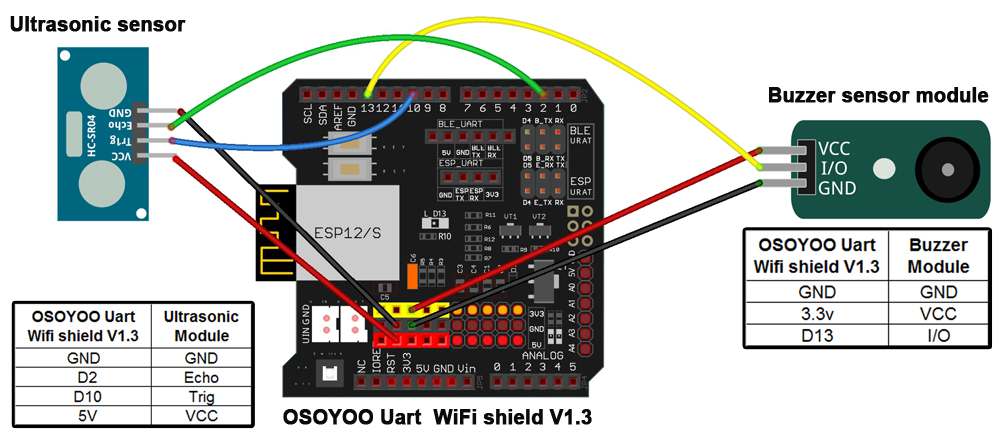
Schritt 7: Verbinden Sie das Ultraschallmodul und das Buzzer-Modul mit dem OSOYOO Uart WiFi Shield V1.3 wie im folgenden Anschlussplan dargestellt Schritt 8: Befestigen Sie die Schrauben an den Kupfersäulen, die das obere Chassis mit dem unteren Chassis verbinden, wenn Sie diese entfernen..
Schritt 1: Installieren Sie die neueste IDE (Wenn Sie eine IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt) IDE herunterladen von https://www.arduino.cc/en/Main/Software?setlang=en, installieren Sie dann die Software.
Schritt 2:Beispielcode herunterladen von https://osoyoo.com/driver/v2smartcar-lesson5.zip , Entpacken Sie die heruntergeladene Zip-Datei smartcar-lesson5.zip, Sie werden einen Ordner namens v2smartcar-lesson5 sehen.
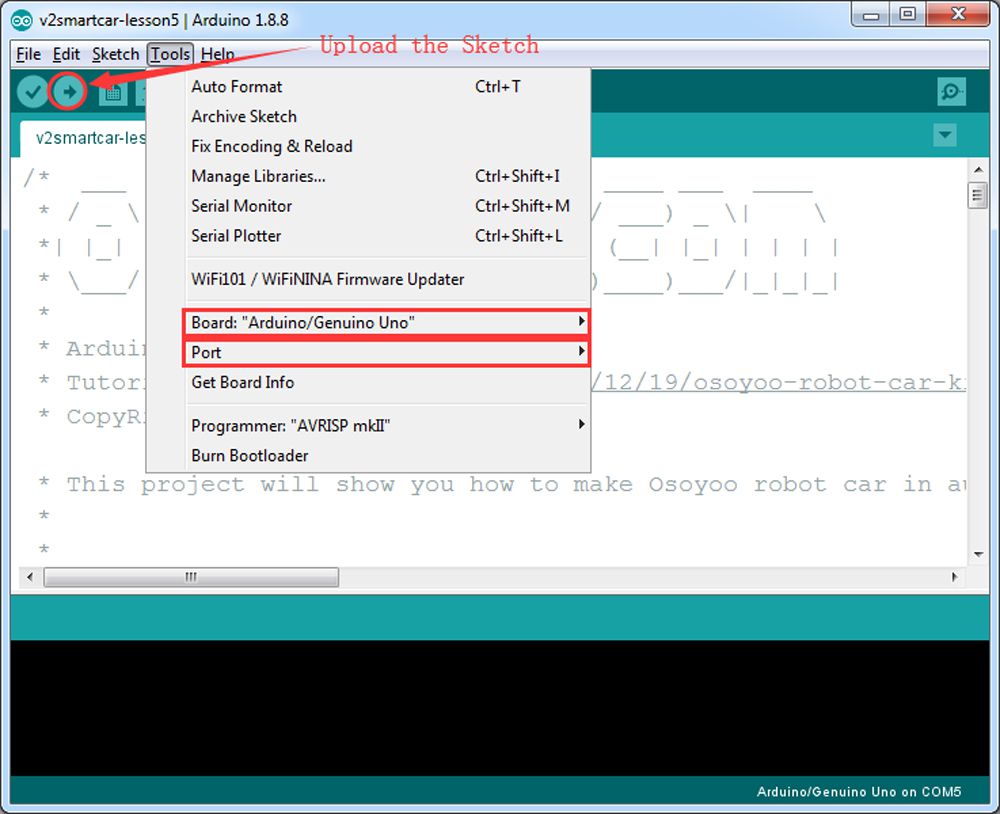
Schritt 3: Schließen Sie Ihr Board mit einem USB-Kabel an den PC an, öffnen Sie die IDE -> klicken Sie auf “file” -> klicken Sie auf “Open” -> wählen Sie den Code “smartcar-lesson5.ino” im Ordner “smartcar-lesson5”, laden Sie den Code in Ihr Board (Hinweis: Bitte schalten Sie den Akku aus, wenn der Roboter über ein USB-Kabel an einen Computer oder Laptop angeschlossen ist.)
Schritt 4: Wählen Sie das entsprechende Board und den entsprechenden Port für Ihr Projekt aus und laden Sie die Skizze auf das Board.
Schritt 5:Ultraschall-Sensor Servo-Ausrichtung der Anfangsrichtung
Nach dem Einschalten der Batterie ertönt ein langer Piepton, dann bewegt sich das Servo etwas und bleibt schließlich 5 Sekunden lang in einer Richtung stehen.
Während dieser ersten 5 Sekunden müssen Sie sicherstellen, dass der Ultraschallsensor (zwei Augen) gerade nach vorne gerichtet ist.
Wenn es nicht geradeaus geht, sollten Sie die Batterie sofort ausschalten und den Sensor aus dem Servo entfernen, ihn wieder einbauen und ihn wie in der folgenden Abbildung geradeaus ausrichten. Andernfalls wird das Programm zur Hindernisvermeidung nicht richtig funktionieren.
Nachdem Sie die Sensorrichtung eingestellt haben, schalten Sie die Batterie wieder ein. Nach dem langen Signalton sollte der Sensor wie in der folgenden Abbildung nach vorne zeigen. Wenn die Richtung nicht gerade nach vorne zeigt, schalten Sie die Batterie aus und richten Sie die Richtung erneut aus.
Prüfung:
Wenn sich das Ultraschallmodul nach dem Einschalten des Batterieschalters an der Batteriebox in die vordere Ansichtsposition dreht, müssen Sie die Sensorposition nicht mehr einstellen. Warten Sie einfach 5 Sekunden. Wenn kein Hindernis erkannt wird, fährt das Auto vorwärts. Wenn ein Hindernis erkannt wird, hält das Auto an, das Ultraschallmodul dreht sich von rechts nach links, um das umliegende Hindernis zu erkennen. Das Roboterauto entscheidet anhand der Daten des Hindernissensors und unseres Algorithmus zur Hindernisvermeidung, ob es nach links, rechts oder rückwärts fährt.
Manchmal kann Ihr Auto eine Kollision haben, wodurch sich die Position des Ultraschallsensors ändert. Dann müssen Sie daran denken, die Ausrichtung des Sensors gemäß dem Link Ultraschallsensor-Servo-Ausrichtung am Anfang erneut durchzuführen.
Schritt 2) Entpacken Sie die obige Datei und führen Sie die Datei servo.ino in Ihrem Auto aus.
Ihr Servo bewegt sich von links nach rechts und stoppt schließlich in der Mittelposition. Wenn Ihr Ultraschallsensor nicht nach vorne gerichtet ist. Lösen Sie den Ultraschallsensor vom Servokopf, richten Sie ihn nach vorne aus und befestigen Sie dann die Schraube des Sensors, um die Ausrichtung zu fixieren. Siehe Video von 7:4 bis 8:10
Schritt 3) Nachdem Sie die Sensorrichtung geändert haben, führen Sie bitte den Sketch v2smartcar-lesson5.ino erneut aus. Ihr Auto wird beginnen, Hindernisse zu vermeiden, indem es fährt.
You can change the following code to adjust the speed:
#define BUZZ_PIN 13
#define FAST_SPEED 250 //both sides of the motor speed
#define SPEED 120 //both sides of the motor speed
#define TURN_SPEED 200 //both sides of the motor speed
#define BACK_SPEED1 255 //back speed
#define BACK_SPEED2 90 //back speed
How to make the car not to stop every LPT cycle and let it move continously. I delete every stop_Stop function from the watchsurround function but it still does it? Please I need help. Thanks
After the robot car is stopped, it detects whether there are obstacles in different directions through the servo and ultrasonic sensors, so that the robot can bypass the obstacles on its way forward.
Hi, when I want to move the black wire from D9 to D3, I see that D3 is taken by another wire, specifically the Out (left) wire of the IR Obstacle Avoidance Module from lesson 3. Where should I move the black wire?
Hi Elaine,
Lesson 5. I have removed wires from Lessons 2 & 3.
The robot only moves 3 or 4cms at a time but does not run when well away fro object. I have reduced te distance in the code to 10 but this has not made any difference. What is my problem?
Jim.
What do you mean “The robot only moves 3 or 4cms at a time but does not run when well away fro object” ? Can you send a short video about your current running result. our support email is [email protected]
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Do you have Youtube account? Please upload the video to Youtube and send the link to us.
Do you mean the car will detect the object for long distance?
Please check whether the wires on Ultrasonic sensor? whether the echo and Trig are cross wrong?
buzzer might be defective. If you want , you can send your order number and address to [email protected] and ask for a new buzzer replacement. Actually buzzer is not quite important, you can keep doing other lessons without buzzer and test lesson 5 after you get new buzzer.
Hi Elaine,
the car behaves strangely. It measures the distance to an obstacle correctly and shows it in the serial monitor, but it never goes forward. It either runs backwards or turns in circles.
How do you know the distance to obstacle showing correctly? If the aar always moving back or turning arround, it means the sensor didn’t send proper obstacle signal to Arduino. there is a simple way to test your ultrasonic sensor obstacle detection function is good or bad.
1)Run v2smartcar-lesson5.ino, do not turn on the battery, keep the USB cable connecting Arduino board and your computer. The car’s ultrasonic sensor will rotate but car won’t move.
2)Open Serial monitor , face the car to any direction which as obstacle(for example, your PC screen), then Serial monitor should show something like:
begin str=00100 or begin str=01100 , which tells that in center direction has some obstacles (0 stands for non-obstacle, 1 stands for obstacle , from left to right 5 digits means the obstacle situation from far left , left, center, right, far right).
If you face the car to an area which has no obstacle, it should show 00000 which means no obstacles in 5 directions, then car will move forward. However, if you got 11111 even your car has no obstacles in front, your sensor connection to Arduino must have some problem.
one of the 4 wires which connect your obstacle sensor to Arduino UNO board is either broken or wrongly connected, check following picture:
Please use 4 pcs new wires to reconnect the 4 wires in ultrasonic sensor(GND, Echo,Trig,VCC) to Arduino GND,D2,D10,5V again. It will solve your problem.

























How to make the bot move faster instead of stopping every second?
You can change the following code to adjust the speed:
#define BUZZ_PIN 13
#define FAST_SPEED 250 //both sides of the motor speed
#define SPEED 120 //both sides of the motor speed
#define TURN_SPEED 200 //both sides of the motor speed
#define BACK_SPEED1 255 //back speed
#define BACK_SPEED2 90 //back speed
Elaine
How to make the car not to stop every LPT cycle and let it move continously. I delete every stop_Stop function from the watchsurround function but it still does it? Please I need help. Thanks
After the robot car is stopped, it detects whether there are obstacles in different directions through the servo and ultrasonic sensors, so that the robot can bypass the obstacles on its way forward.
I don’t know what your code looks like, and I don’t quite understand your purpose of doing this. Can you post your code?
It is normal for the Model X motor driver to flash when only Uno’s board is powered?
Please check the wiring and then check the battery status of the robot
Hi, when I want to move the black wire from D9 to D3, I see that D3 is taken by another wire, specifically the Out (left) wire of the IR Obstacle Avoidance Module from lesson 3. Where should I move the black wire?
Hi, you need to remove the wires of lesson2 and lesson3, when you test the lesson 4 and 5.
Can someone explain to me what this part of the code in the watch() function means?
digitalWrite(Trig_PIN,LOW);
delayMicroseconds(5);
digitalWrite(Trig_PIN,HIGH);
delayMicroseconds(15);
digitalWrite(Trig_PIN,LOW);
echo_distance=pulseIn(Echo_PIN,HIGH);
I think we need to measure the delay of the pulse to know the distance, but it looks like just measuring the pulse width which is fixed to be 15 μs.
Hi Elaine,
Lesson 5. I have removed wires from Lessons 2 & 3.
The robot only moves 3 or 4cms at a time but does not run when well away fro object. I have reduced te distance in the code to 10 but this has not made any difference. What is my problem?
Jim.
hi, James,
What do you mean “The robot only moves 3 or 4cms at a time but does not run when well away fro object” ? Can you send a short video about your current running result. our support email is [email protected]
Thanks
John @osoyoo support team
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Hi John,
I have been trying for several days to send you a short video but I am unable to make it short enough to be accepted by the email serrvice. So I will try to explain what is happening.
When switched on in an open space in a room , minimum of one meter from an obstacle. The robot will do a scan of with the distance scanner then move forward about 4cms, that is about 3/4 turn of the wheels then move back slightly, turn slightly to right or left , then do the same again. More or less stayiong within the same square. I have reduced the minimum distance in the code to 10cms but this has made no difference. I would expect the robot , when switched on to move forward until it sees an object 10cms away, stop do a scan, back up, turn away and do another scan then proceed to go forward again etc. Am I expecting wrong?
Do you have Youtube account? Please upload the video to Youtube and send the link to us.
Do you mean the car will detect the object for long distance?
Please check whether the wires on Ultrasonic sensor? whether the echo and Trig are cross wrong?
The M2.2 * 8 screws do not actually attach the motor to the chassis, the chassis’s holes are too big so the motor just moves around
Hi Elaine
I have now reached Lesson 5. It works OK except the buzzer does not make sound. Wiring is OK
Any suggestions?
Regards, James.
buzzer might be defective. If you want , you can send your order number and address to [email protected] and ask for a new buzzer replacement. Actually buzzer is not quite important, you can keep doing other lessons without buzzer and test lesson 5 after you get new buzzer.
Hi Elaine,
Thanks fort your attention. I will not bother with the buzzer. I have now completed all lessons.
Regards, James.
olá eu montei o carrinho todo mas quando ligo o senssor ultrassonico ele começa a dar um beep constatente sem parar o que que eu faço?
you can remove that buzzer. it is not a necessary part.
Hi Elaine,
the car behaves strangely. It measures the distance to an obstacle correctly and shows it in the serial monitor, but it never goes forward. It either runs backwards or turns in circles.
How do you know the distance to obstacle showing correctly? If the aar always moving back or turning arround, it means the sensor didn’t send proper obstacle signal to Arduino. there is a simple way to test your ultrasonic sensor obstacle detection function is good or bad.
1)Run v2smartcar-lesson5.ino, do not turn on the battery, keep the USB cable connecting Arduino board and your computer. The car’s ultrasonic sensor will rotate but car won’t move.
2)Open Serial monitor , face the car to any direction which as obstacle(for example, your PC screen), then Serial monitor should show something like:
begin str=00100 or begin str=01100 , which tells that in center direction has some obstacles (0 stands for non-obstacle, 1 stands for obstacle , from left to right 5 digits means the obstacle situation from far left , left, center, right, far right).
If you face the car to an area which has no obstacle, it should show 00000 which means no obstacles in 5 directions, then car will move forward. However, if you got 11111 even your car has no obstacles in front, your sensor connection to Arduino must have some problem.
Hope this helps.
my robot shows an obsticle to the center of it, even if there is not one ther, like 00100
one of the 4 wires which connect your obstacle sensor to Arduino UNO board is either broken or wrongly connected, check following picture:

Please use 4 pcs new wires to reconnect the 4 wires in ultrasonic sensor(GND, Echo,Trig,VCC) to Arduino GND,D2,D10,5V again. It will solve your problem.