Location: Home » mBlock Graphic Programming » Kit di apprendimento della programmazione grafica Arduino Lezione 18 – Auto a ultrasuoni per evitare gli ostacoli
Kit di apprendimento della programmazione grafica Arduino Lezione 18 – Auto a ultrasuoni per evitare gli ostacoli
In questo progetto, useremo il sensore di ostacolo (rilevatore di distanza ultrasonico) per rilevare gli ostacoli, evitare la collisione durante la guida automatica.
Scheda OSOYOO UNO (pienamente compatibile con Arduino UNO rev.3) x 1
OSOYOO Magic I/O Shield per Arduino x1
OSOYOO Modulo sensore IR x1
OSOYOO Servomotore x1OSOYOO Modulo sensore a ultrasuoni x1OSOYOO Cavo PNP a 3 pin 10cm x 6
OSOYOO Cavo PNP a 3 pin 20cm x 1
OSOYOO Cavo PNP a 4 pin 20cm x 1
Piattaforma acrilica x1
Motore di trasmissione con 2 ruoteCavo USB
Installare il telaio di base della smart car come da Lezione 21, se avete già completato l’installazione nella Lezione 21, tenetela così com’è.
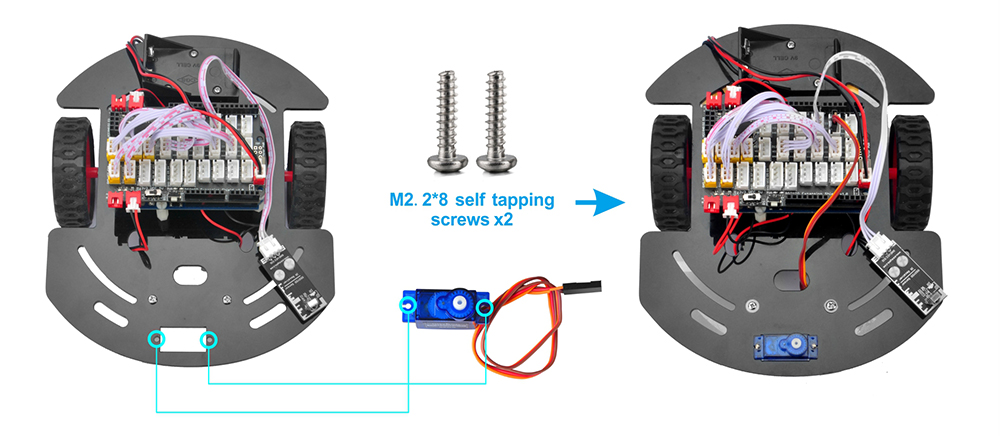
Fase 1: Rimuovere le viti sui pilastri di rame e installare il servomotore nella parte anteriore del telaio dell’auto con 2 pezzi M2.2 * 8 viti autofilettanti.
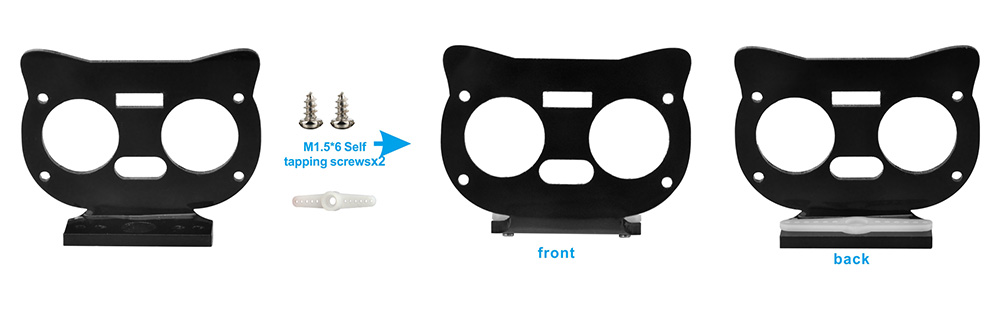
Passo 2: Installare la staffa (nel pacchetto del servomotore) sul supporto di montaggio per il modulo ultrasonico con viti autofilettanti 2pcs M1.5*4
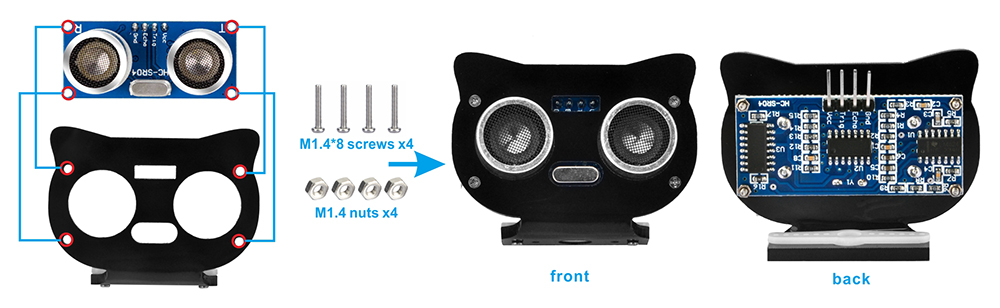
Passo 3: Installare il modulo ad ultrasuoni al supporto di montaggio con 4pcs M1.4*8 vite e dadi M1.4.
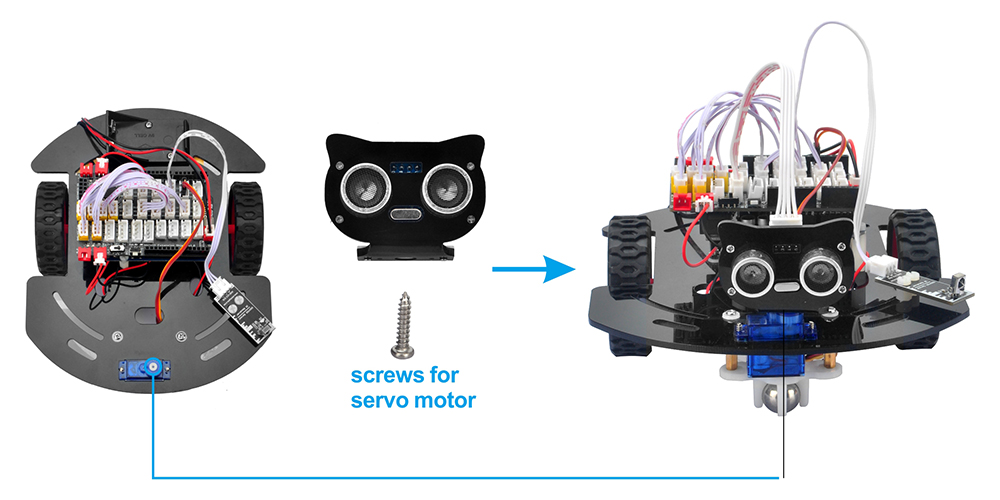
Passo 4: Installare il supporto per il modulo a ultrasuoni sul servomotore con la vite autofilettante M2*4.
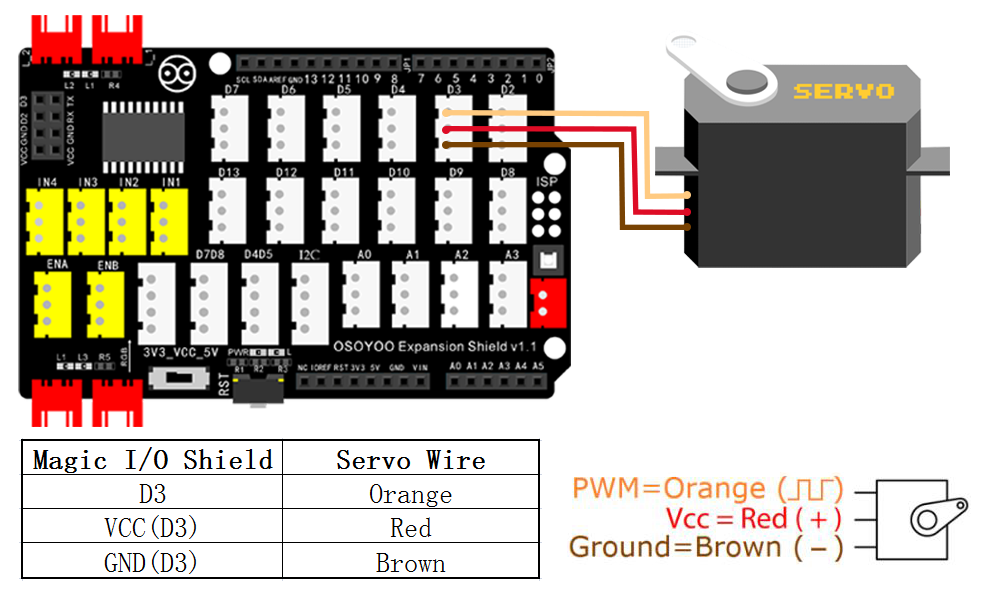
Passo 5: Se avete già completato l’installazione della connessione dei fili nella Lezione 21, mantenetela così com’è. Poi collegate il servomotore SG90 a OSOYOO alla porta D3 dello scudo Magic I/O come il seguente grafico.
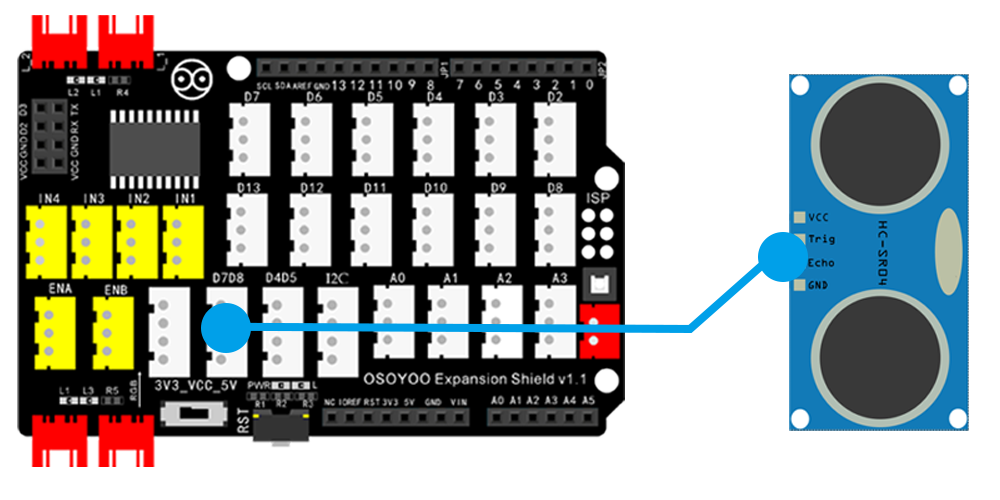
Passo 6: Poi collegare il sensore del modulo a ultrasuoni alla porta D7D8 dello schermo Magic I/O con un cavo PNP a 4 pin come di seguito:
Al fine di controllare gli ostacoli e trovare il percorso per l’auto, abbiamo bisogno di impostare tre variabili per registrare lo stato dell’ostacolo in 3 direzioni (sinistra, centro e destra).
Quando la distanza dall’ostacolo è inferiore a 15 cm, segneremo lo stato dell’ostacolo come 1, altrimenti segneremo lo stato come 0. Lo stato 1 significa che c’è un ostacolo in quella direzione: Se lo stato centrale è 0 (nessun ostacolo), allora muoviti in avanti. Se lo stato centrale è 1, allora controlla lo stato di sinistra, se lo stato di sinistra è 0 (nessun ostacolo sul lato sinistro), gira a sinistra. Se lo stato di sinistra è 1, allora controlla lo stato di destra, se lo stato di sinistra è 0 (nessun ostacolo sul lato destro), gira a destra. Se lo stato di destra è 1, questo significa che da sinistra, centro a destra le 3 direzioni hanno tutte degli ostacoli. Allora l’auto farà una curva a U.
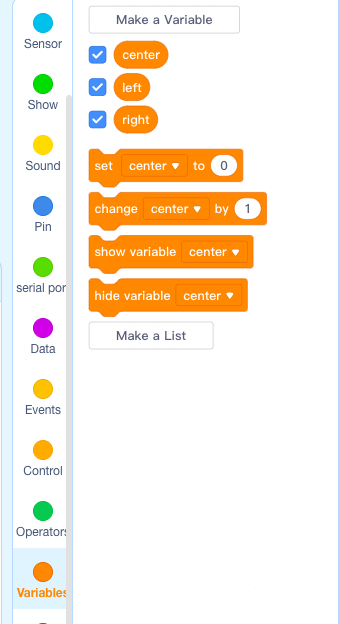
Per iniziare la codifica, dobbiamo cliccare su Variabili, poi aggiungere 3 variabili chiamate left, center, right come segue:
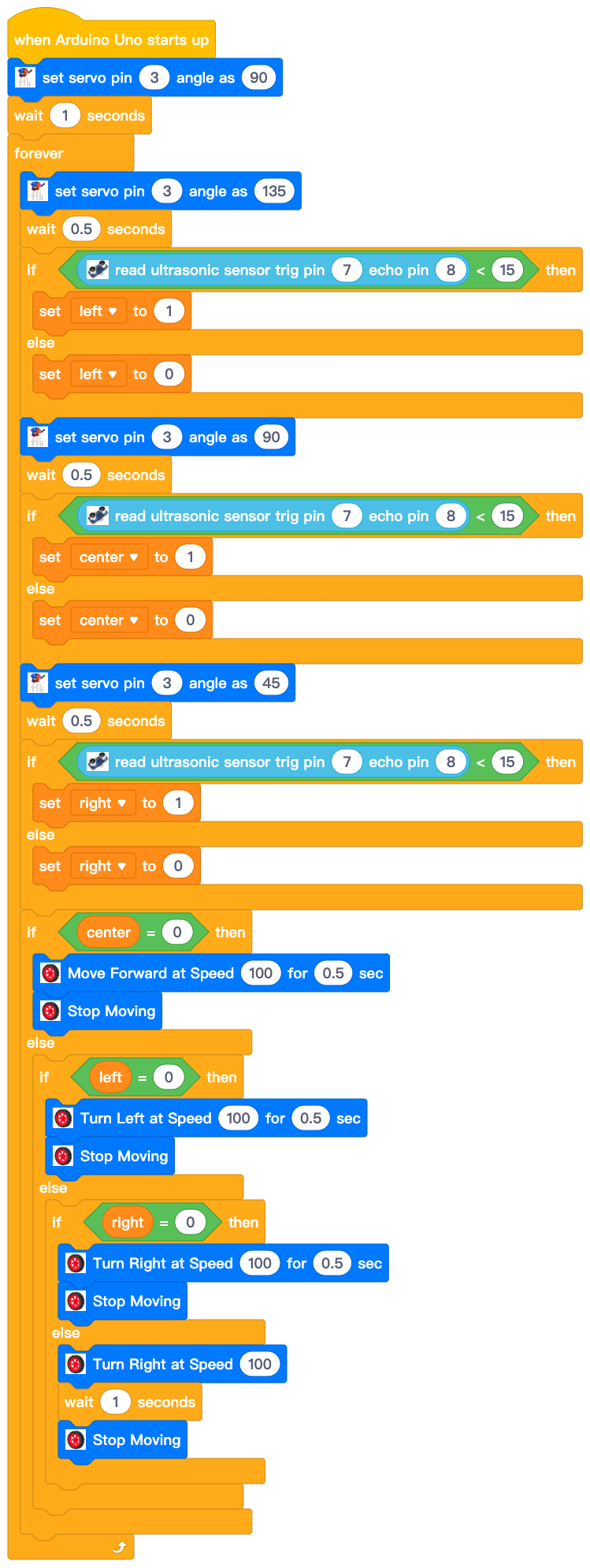
Il passo successivo, abbiamo bisogno di usare questi 3 variabili per costruire i blocchi e scrivere il programma per evitare gli ostacoli. Poiché gli studenti hanno imparato molto sulla costruzione dei blocchi da diverse nelle lezione precedente, in questo progetto finale, abbiamo omesso tutti i passi intermedi e vi diamo solo la struttura finale del blocco come segue:
Si prega di caricare il codice del blocco di cui sopra su Arduino come nelle lezioni precedenti
Regolare la direzione del sensore a ultrasuoni:
Dopo che il codice è stato caricato nella macchina robot, scollegare il cavo USB dalla scheda UNO e accendere l’interruttore di alimentazione sulla scheda Magic I/O. Poi il sensore a ultrasuoni ruoterà per affrontare la direzione in avanti per 5 secondi. Se il sensore a ultrasuoni non è rivolto verso la posizione anteriore, spegnere l’alimentazione. Si prega di utilizzare un cacciavite per regolare la direzione del sensore ad ultrasuoni e renderlo rivolto in avanti, quindi accendere di nuovo l’alimentazione e durante i primi 5 secondi, il sensore dovrebbe essere rivolto verso la direzione anteriore.