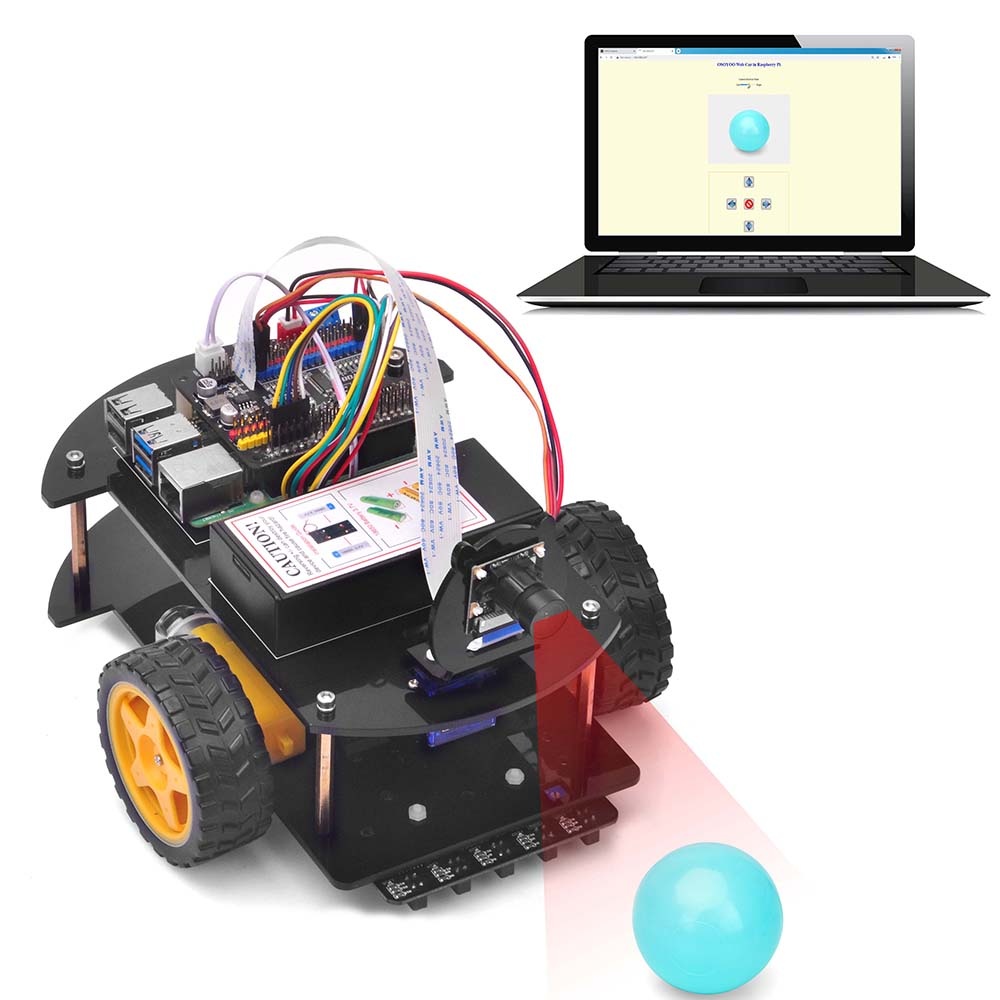
In questa lezione verrà illustrato come utilizzare il software Python3 Flask e M-Jpeg Streamer per controllare un’auto robot Raspberry Pi tramite Internet. Monitorerai il movimento in tempo reale dell’auto attraverso il suo occhio (telecamera frontale).
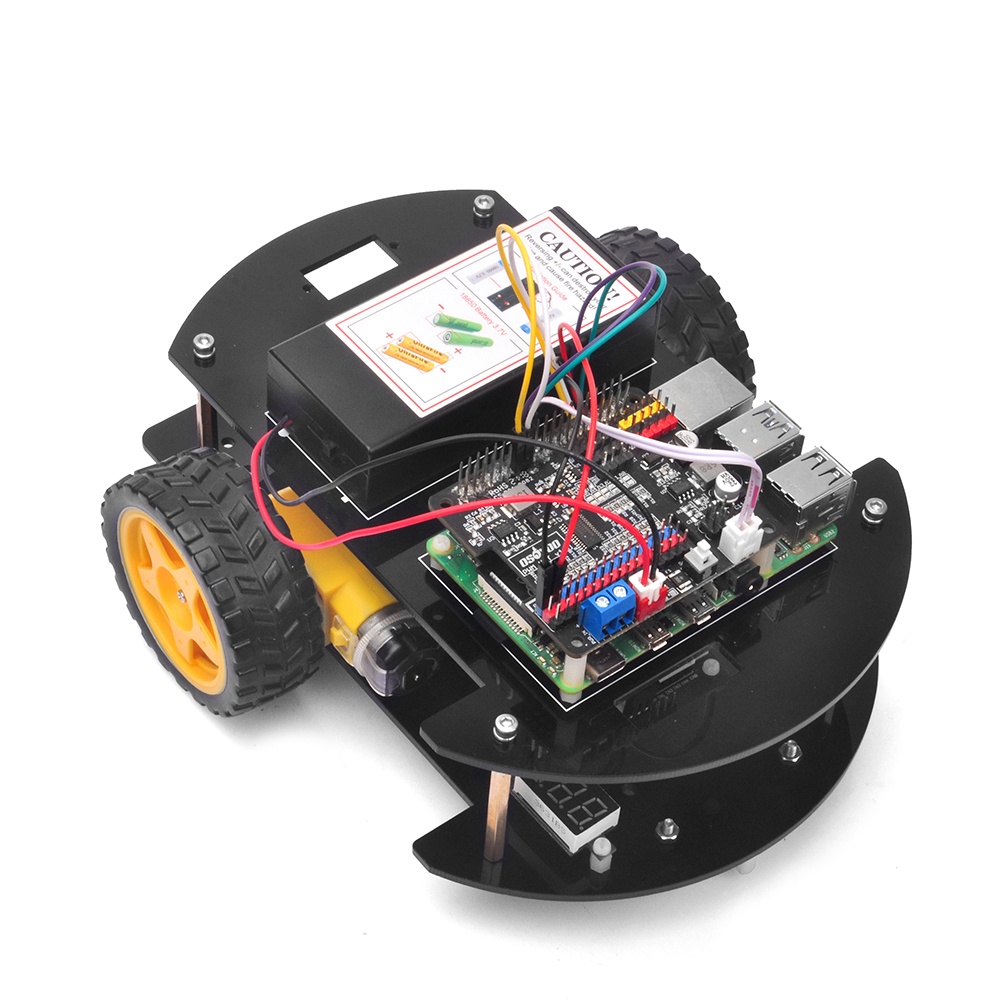
Passo 1: È necessario completare il quadro di base della Lezione 1. Se hai già completato la lezione 3, rimuovi il supporto del supporto del sensore a ultrasuoni dal servomotore e i fili dal sensore a ultrasuoni, quindi continua con questa lezione
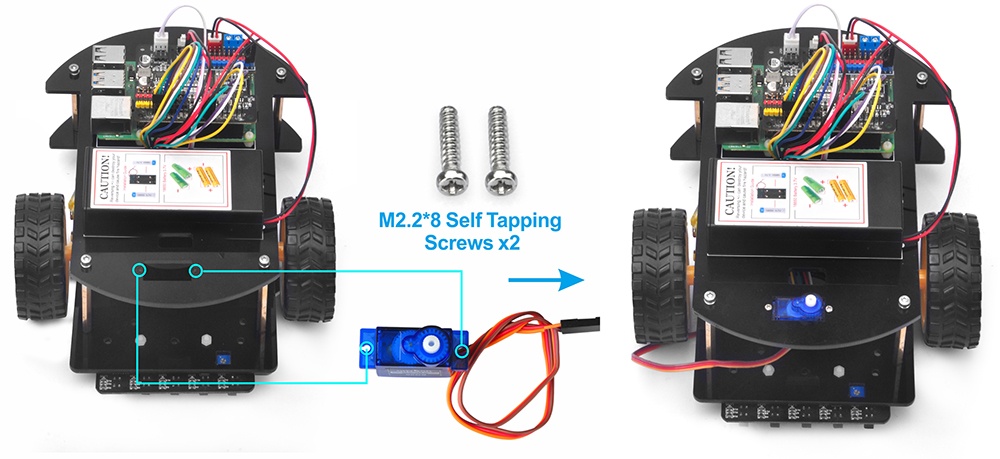
Passo 2: installare il servomotore nella parte anteriore del telaio superiore dell’auto con viti autofilettanti M2.2 * 8 da 2 pezzi
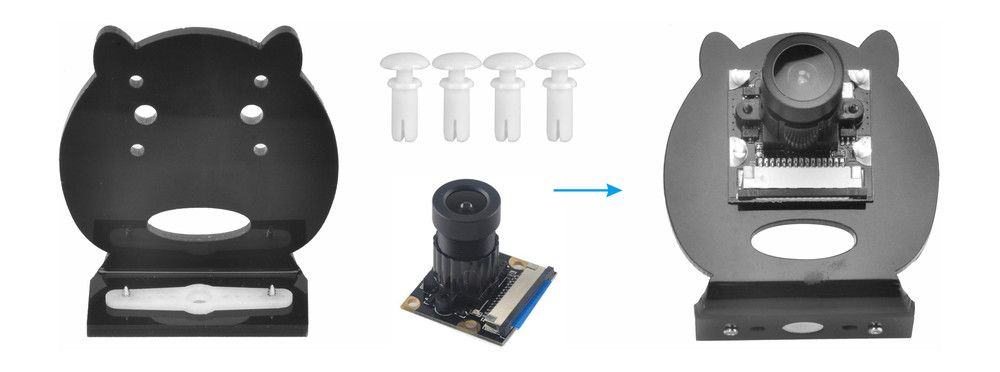
Passo 3: scegliere la staffa a fessura nel servomotore per attraversare il supporto della fotocamera dall’alto verso il basso e fissare la lama con viti autofilettanti M1,5 * 6
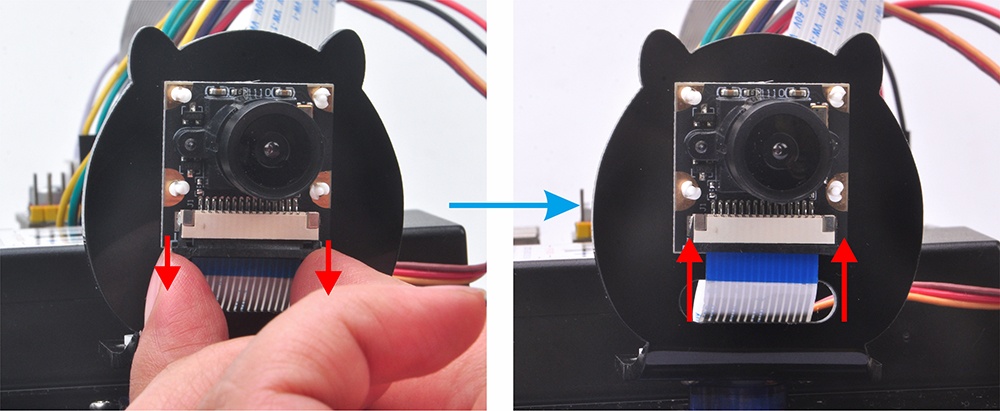
Passo 4: installare la fotocamera CSI sul supporto con rivetti a perno M2 da 4 pezzi
Passo 5: installare il supporto della fotocamera sul servomotore con viti autofilettanti 1pc M2 * 4
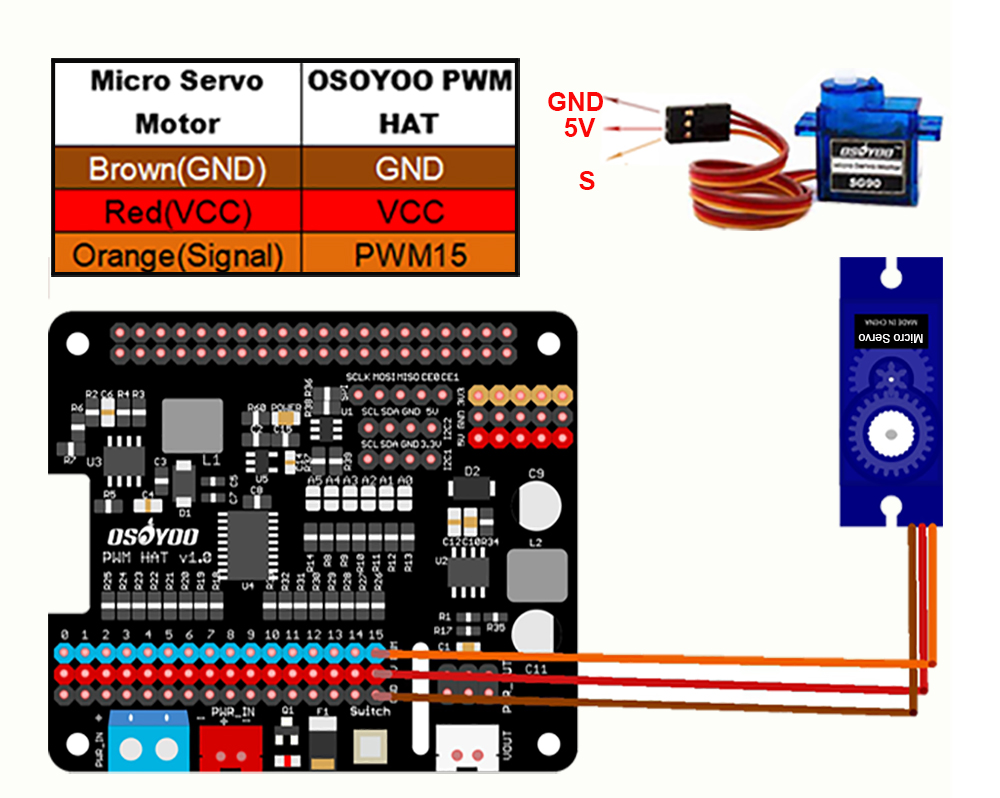
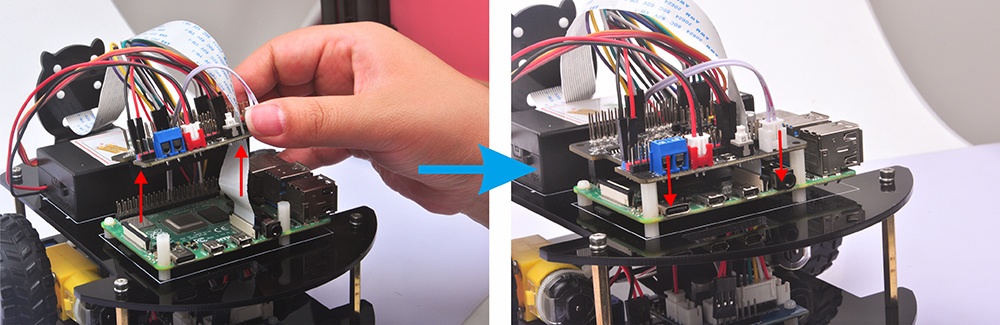
Passo 1) Servo Deve essere installato e collegato PWM 15 porta
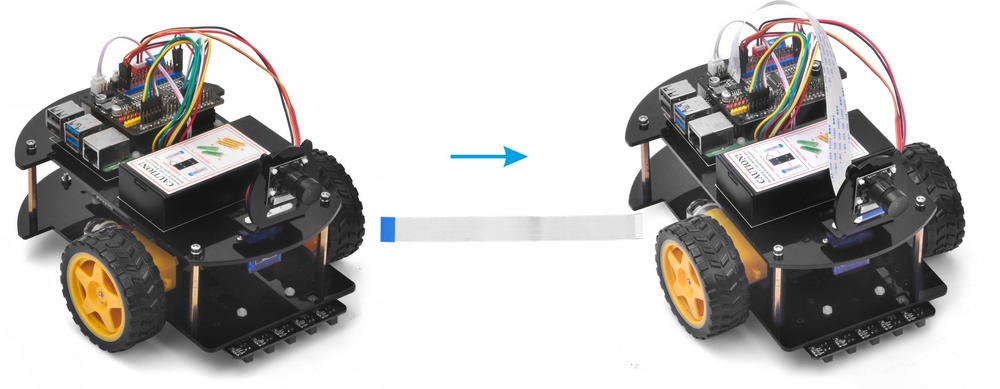
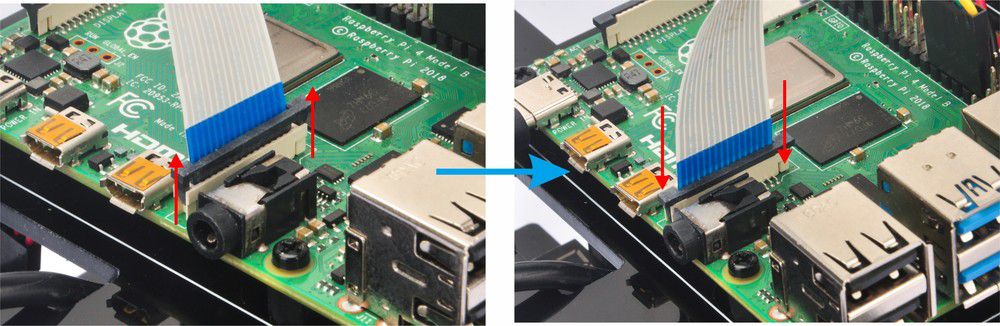
Passo 2) Collegare la fotocamera CSI allo slot CSI di Raspberry Pi con cavo a nastro CSI (prestare attenzione ai collegamenti del cavo prima di installarlo.)
Passo 1: Assicurati di aver installato rpi.gpio, la libreria adafruit-pca9685 e abilita I2C nella lezione 1 e accendi l’auto robot.
Passo 2: Si prega di abilitare la fotocamera in Raspberry Pi digitando il seguente comando (Nota: se si masterizzano BOOKWORM e Trixie OS, non è necessario abilitare la fotocamera.)
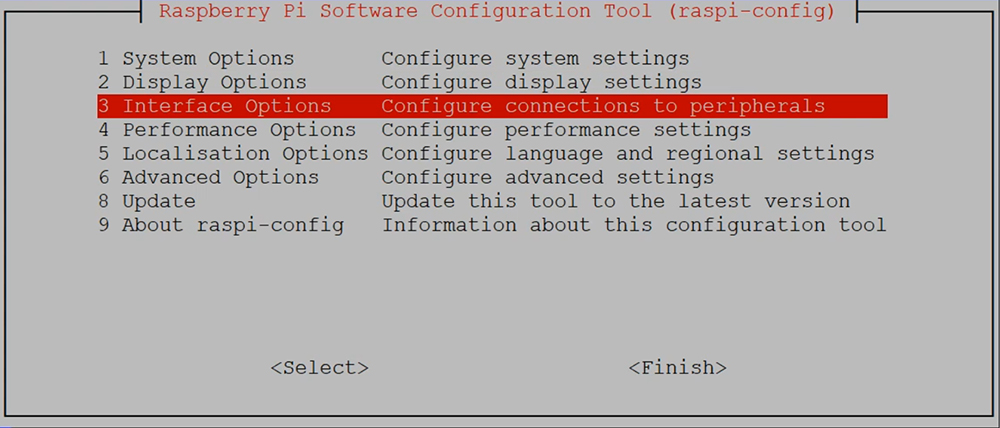
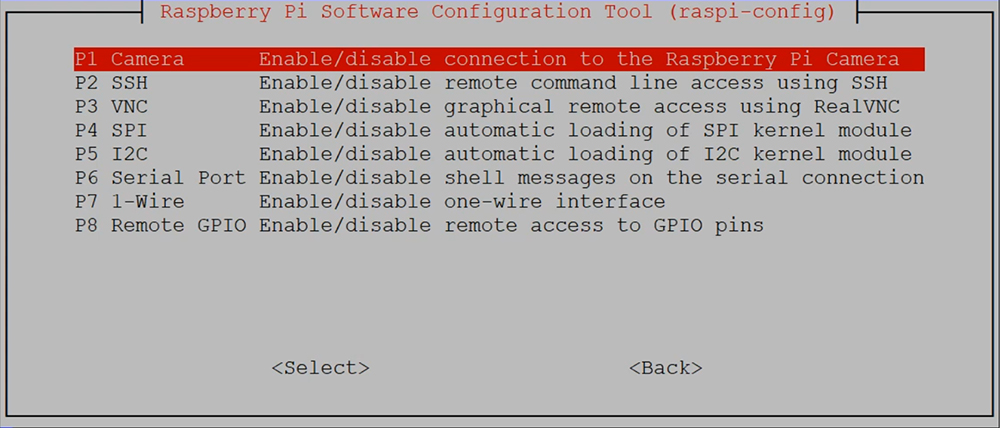
sudo raspi-config
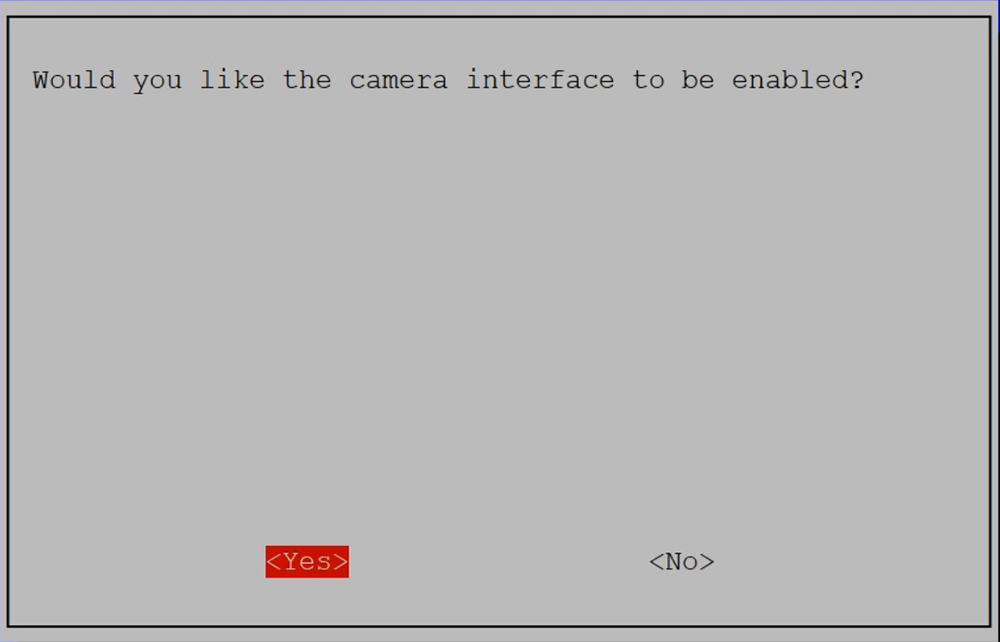
Quindi select → Interfacing Options→ Camera→ Yes→ Ok→ Finish (riavviare il Raspberry Pi in base all’avviso).
Passo 3: Digitare il seguente comando per installare il software mjpeg-streamer:
wget https://osoyoo.com/driver/picar/camera.sh
Passo 4: Digitare il seguente comando:
bash camera.sh
Passo 5: finalmente il seguente comando:
bash caminstall.sh
Dopo aver eseguito i comandi precedenti, il software mjpeg-streamer viene installato nel tuo Raspberry Pi. Così semplice!
NOTA: Il software Camera Stream e bash camera.sh devono essere installati ed eseguiti solo UNA VOLTA! Quindi, se desideri eseguire Camera Stream in futuro, segui semplicemente il passaggio successivo (PASSAGGIO 6) ed esegui il file python startcam.py.
Passo 6: Avvio Dopo aver installato Camera Server, è possibile avviarlo eseguendo il seguente comando nel terminale Pi:
python startcam.py
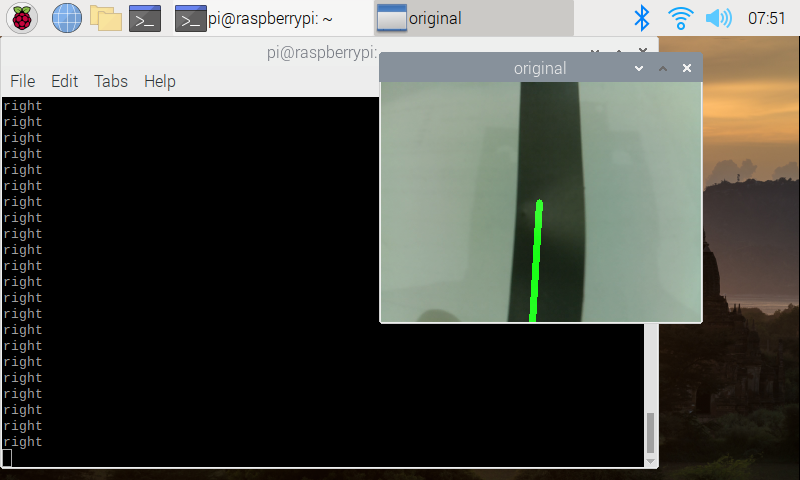
Passo 7: Ora puoi utilizzare il tuo browser per testare il video di sorveglianza. Visita il sito http://your_raspberry_pi_ip:8899/stream.mjpg (nel mio caso http://192.168.68.227:8899/stream.mjpg) e vedrai il video di sorveglianza.
METODO 1: UTILIZZARE IL BROWSER PER CONTROLLARE UN’AUTO ROBOT RASPBERRY PI TRAMITE INTERNET
Passo 1: Aprire una nuova finestra del terminale ed eseguire il seguente codice per installare il software per auto robot controllato dalla webcam OSOYOO
wget https://osoyoo.com/driver/picar/picar4.sh
Passo 2: digitare il seguente comando:
bash picar4.sh
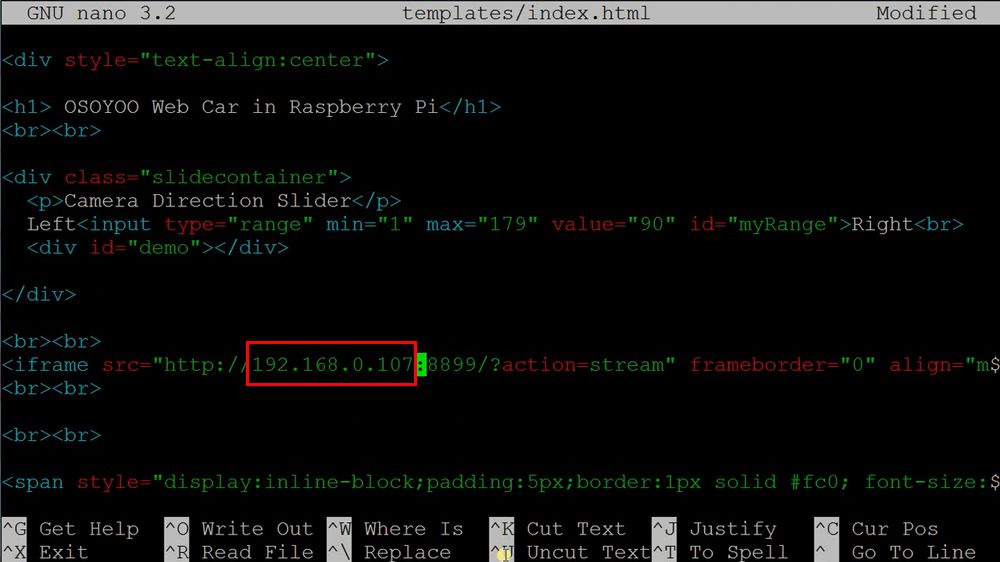
Passo 3: Quindi digitare il seguente comando per modificare il file
nano ~/piwebcar/templates/index.html
Passo 4: Sostituisci 10.0.0.23 con l’indirizzo IP del tuo pi, quindi premi “Ctrl” + “X” e poi ‘Y’ per salvare il file e infine premi “Invio” per uscire dal file.
Passo 8: metti l’auto a terra ed esegui il codice digitando il seguente comando:
sudo python ~/piwebcar/webcar.py
Passo 9: Nel tuo PC o telefono cellulare che è la stessa rete Wi-Fi del tuo Raspberry Pi, apri il browser e visita http://your_RaspberryPi_ip_address.
I pulsanti freccia sono tasti di controllo della direzione, il pulsante cerchio rosso al centro è il tasto STOP. Ci sono quattro pulsanti di controllo della velocità nella parte inferiore:
0 chiave significa la velocità più bassa
— chiave significa la 2a bassa velocità
== chiave significa velocità regolare
++ chiave significa massima velocità
Nella parte superiore della pagina, c’è un cursore di direzione della fotocamera, è possibile spostare il cursore per ruotare il servo e modificare l’orientamento della fotocamera.
METODO 2: UTILIZZARE APP PER CONTROLLARE UN’AUTO ROBOT RASPBERRY PI TRAMITE INTERNET
Passo 1: Aprire una nuova finestra di terminale ed eseguire il codice seguente per scaricare il codice di esempio per il controllo APP
Passo 2: Digitare il seguente comando per eseguire il codice di esempio :
python picar-udp-control4.py
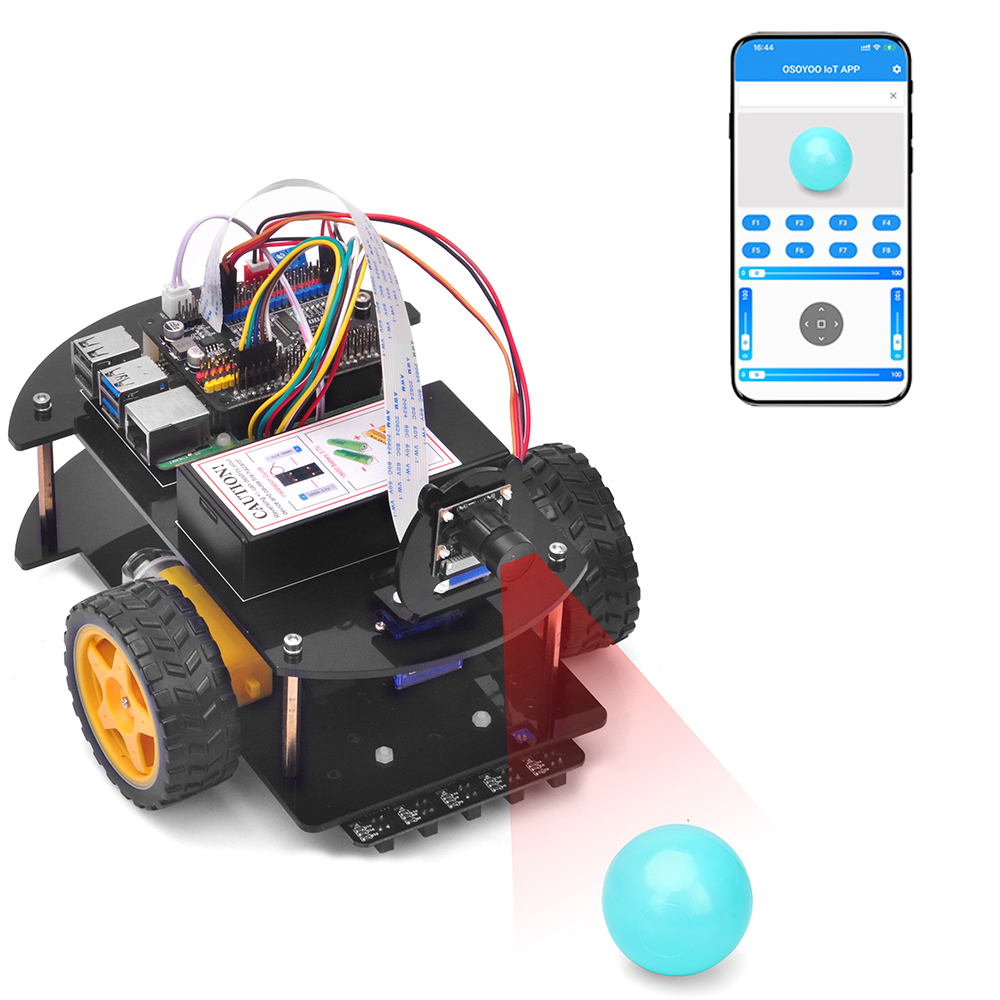
Passo 3) Scarica OSOYOO Wi-Fi UDP Robot Car control APP In Google Play o Apple Store, cerca le parole chiave “OSOYOO IoT UDP Robot APP”, troverai un’icona rossa APP come segue (Nota: se non riuscite a trovare questa APP in Google Play, potete scaricare direttamente l’APP dal seguente link: https://osoyoo.com/driver/udp-app.apk):
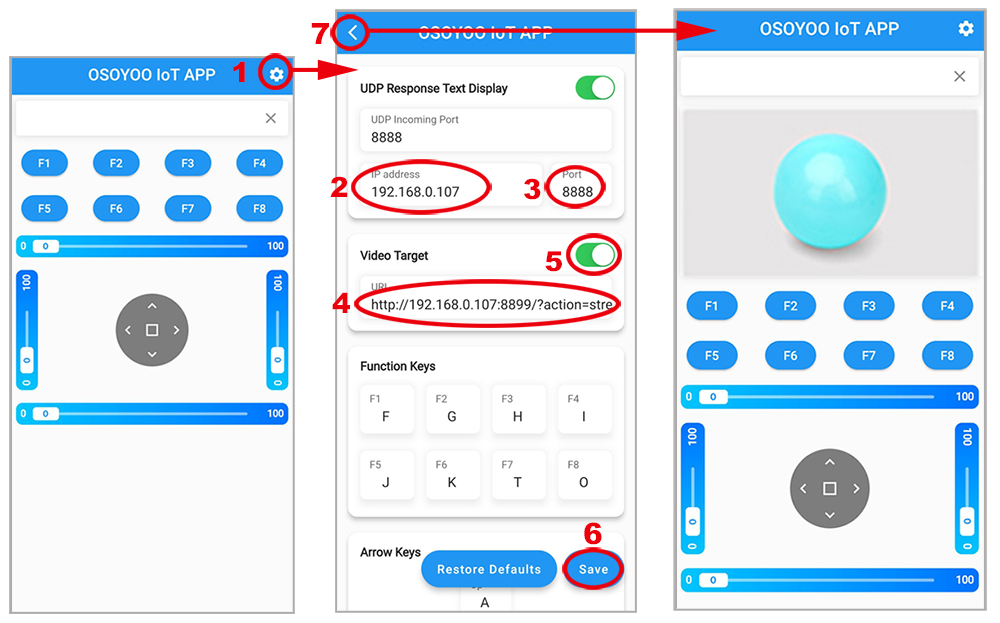
Passo 4) Collegare il telefono allo stesso router Wi-Fi SSID del Raspberry Pi. Aprire l’APP, fare clic su “icona di impostazione(1)” per accedere alla “UI di impostazione”, inserire l’indirizzo IP del Raspberry Pi e [Port] a 8888, inserire [http://your_raspberry_pi_ip:8899/?action=stream] come target video, quindi portare [interruttore target video] a verde, quindi fare clic su [save], quindi fare clic su “icona posteriore(7)” per tornare alla UI di controllo come segue:
Passo 5) Ora, metti l’auto a terra e puoi fare clic sui tasti di direzione < > ^ v per far muovere l’auto. Usa || tasto di pausa per fermare il movimento dell’auto.
Il dispositivo di scorrimento nella parte superiore dei tasti di direzione è un dispositivo di scorrimento della direzione della fotocamera ed è possibile spostare il cursore per ruotare il servo e modificare l’orientamento della fotocamera.
Il cursore a sinistra dei tasti di direzione è un cursore di velocità e puoi spostare il cursore verso l’alto per accelerare questo robot.
Nota: F1~F8 e il dispositivo di scorrimento inferiore e destro non sono disponibili in questa lezione.