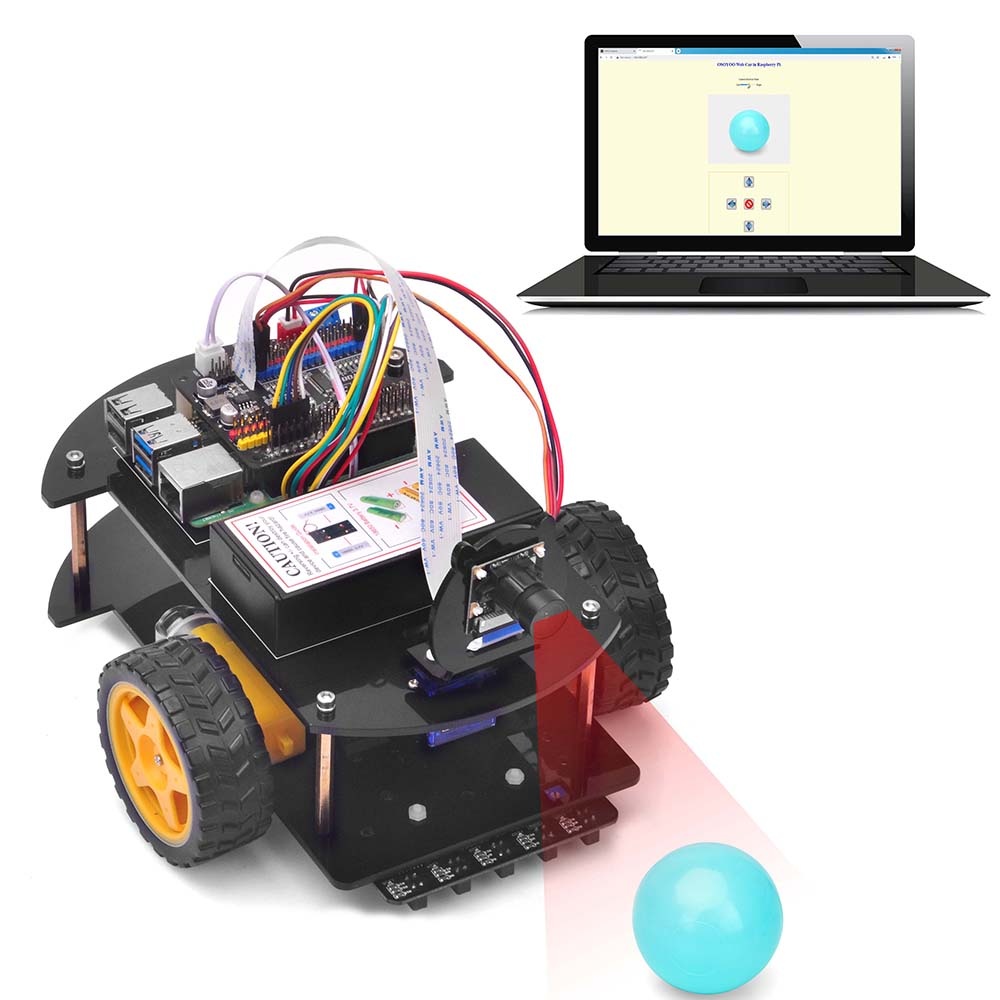
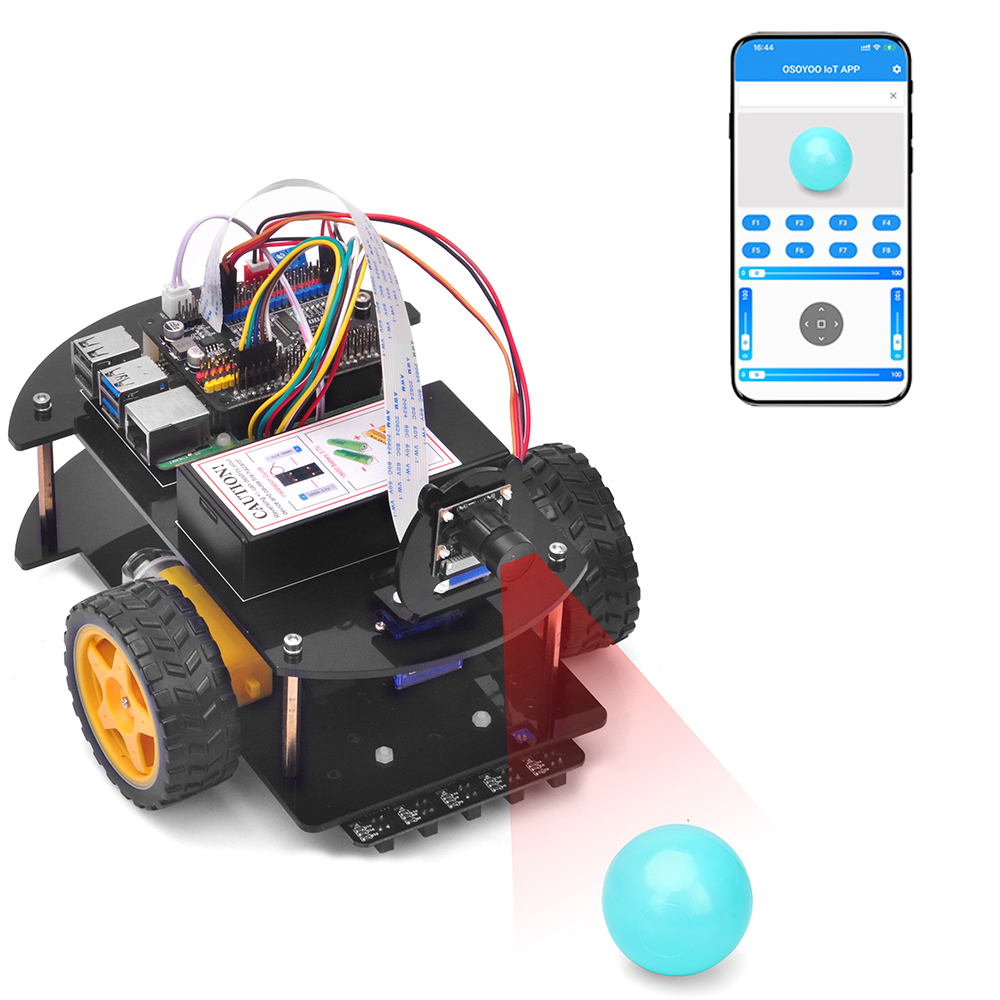
In dieser Lektion zeigen wir Ihnen, wie Sie Python3 Flask und die M-Jpeg Streamer-Software verwenden, um ein Raspberry Pi Robot Car über das Internet zu steuern. Sie überwachen die Bewegung des Autos in Echtzeit durch sein Auge (Frontkamera).
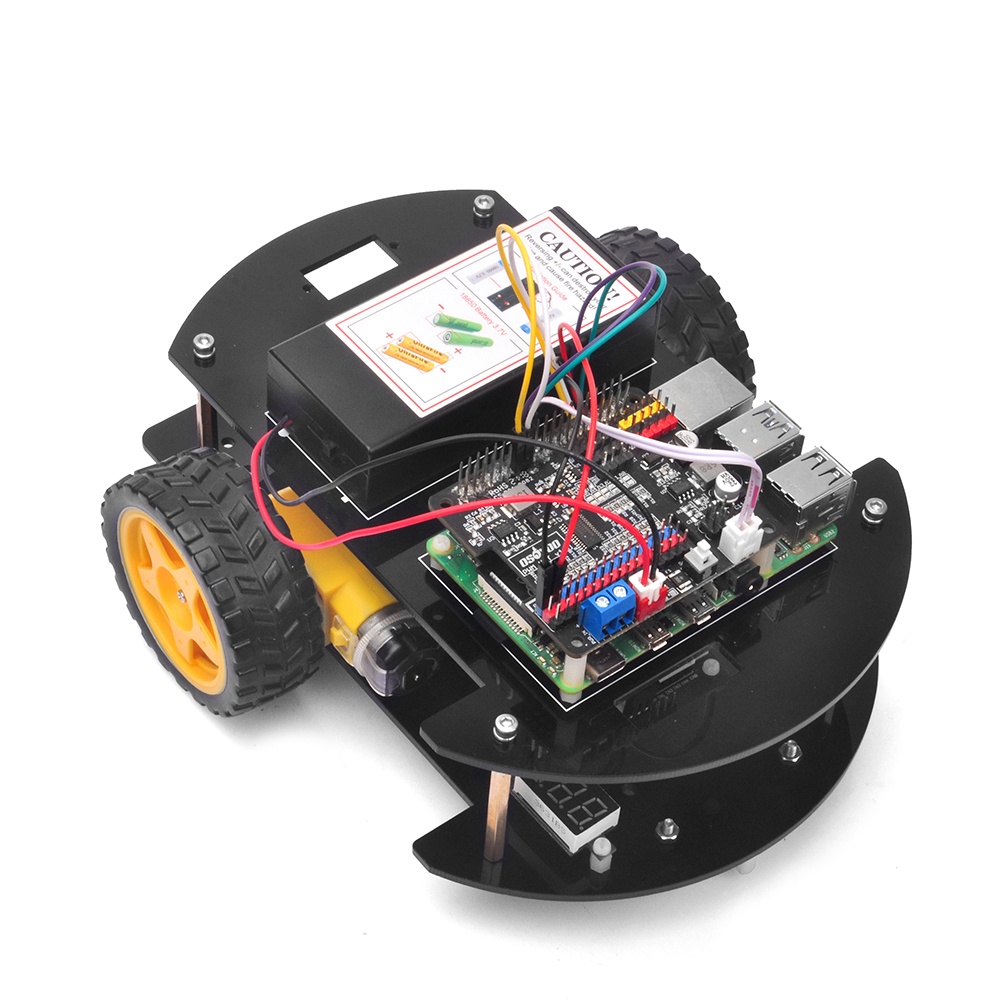
Schritt 1: Sie müssen das Grundgerüst von Lektion 1 abschließen. Wenn Sie Lektion 3 bereits abgeschlossen haben, entfernen Sie bitte die Halterung für die Ultraschallsensorhalterung vom Servomotor und die Drähte vom Ultraschallsensor und fahren Sie dann mit dieser Lektion fort
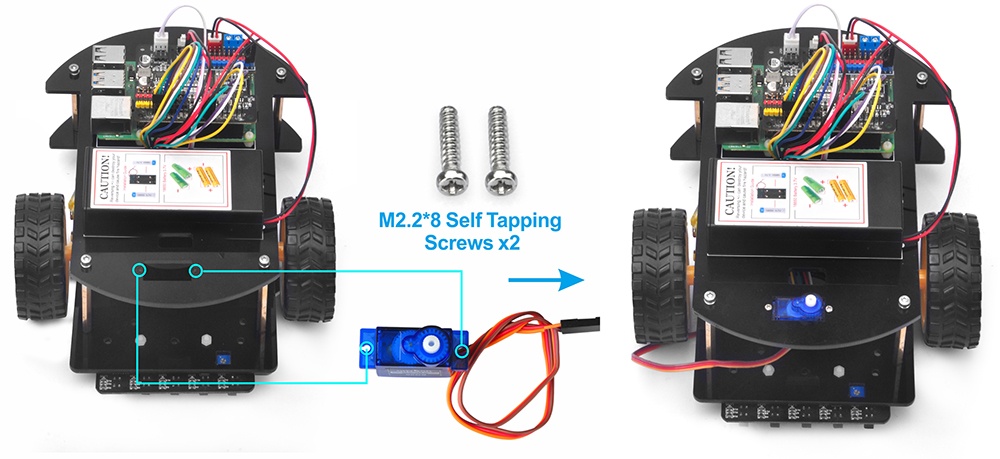
Schritt 2: Installieren Sie den Servomotor an der Vorderseite des oberen Fahrzeugchassis mit 2 Stück M2,2 * 8 selbstschneidenden Schrauben
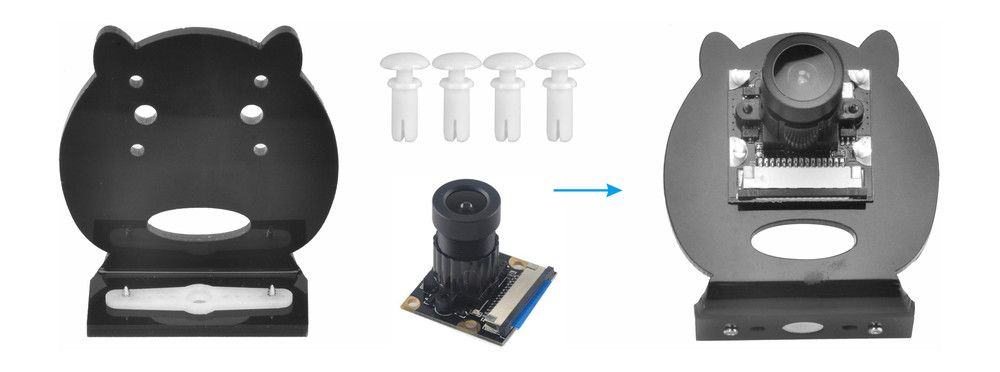
Schritt 3: Wählen Sie eine geschlitzte Halterung im Servomotor, um den Kamerahalter von oben nach unten zu kreuzen, und befestigen Sie die Klinge mit selbstschneidenden M1,5 * 6-Blechschrauben
Schritt 4: Montieren Sie die CSI-Kamera mit 4 Stück M2-Stecknadelnieten an der Halterung
Schritt 5: Installieren Sie den Kamerahalter am Servomotor mit 1 Stück M2 * 4 selbstschneidenden Schrauben
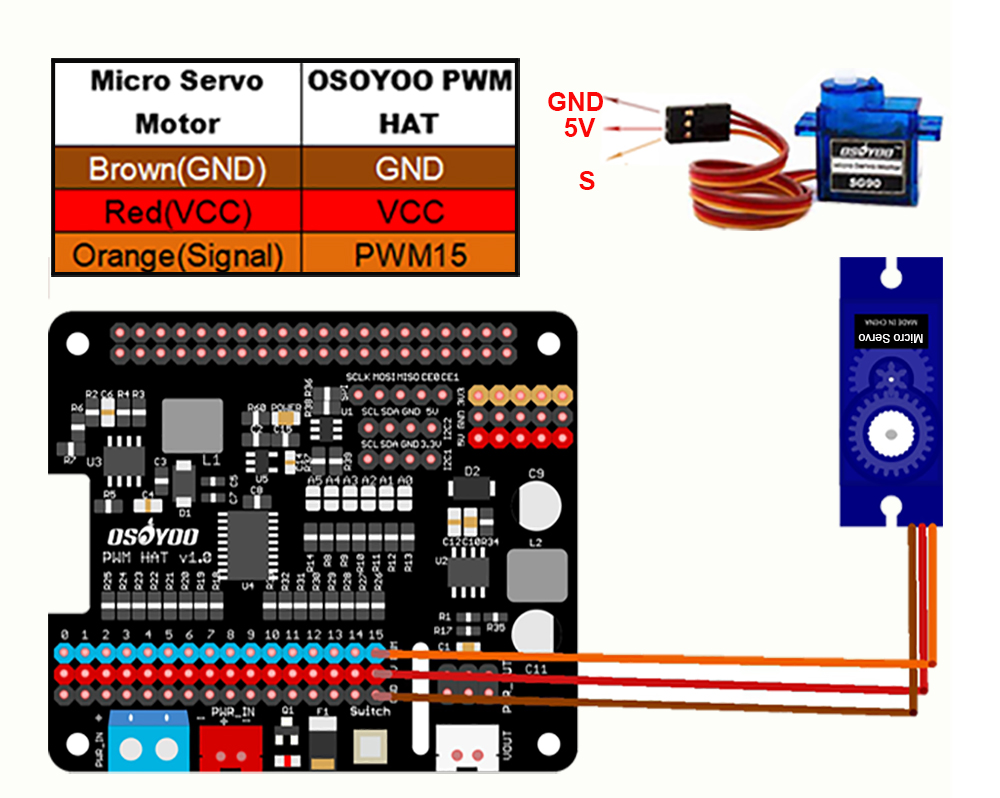
Schritt 1) Servo Muss installiert und angeschlossen werden PWM 15 Port
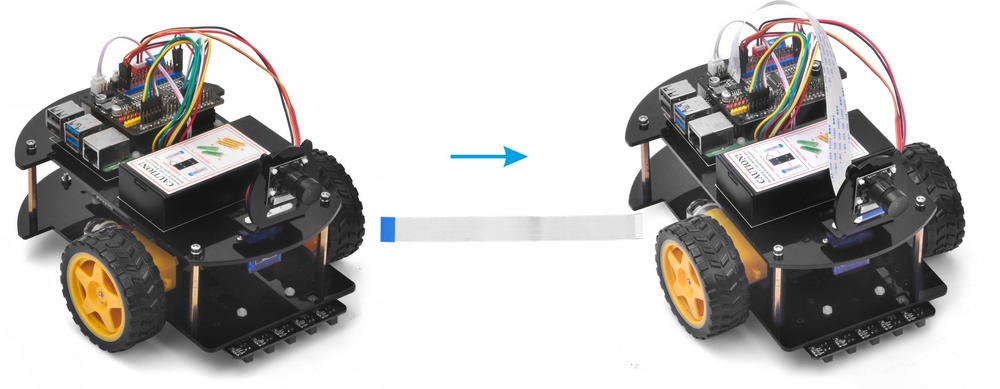
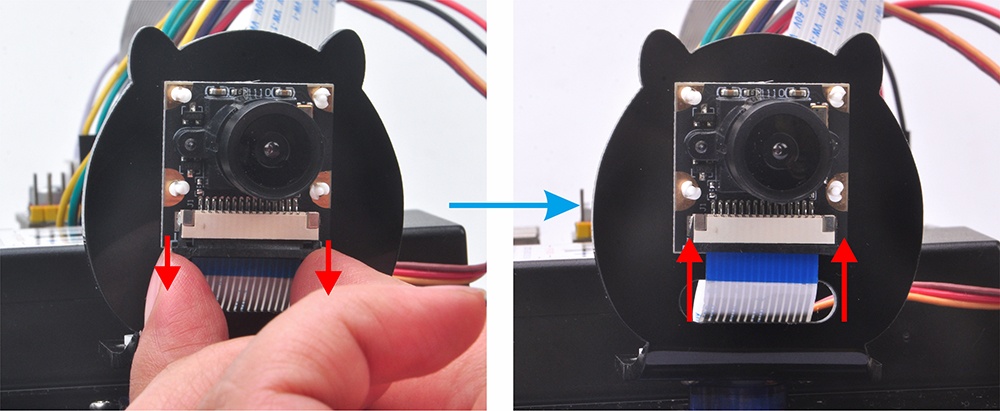
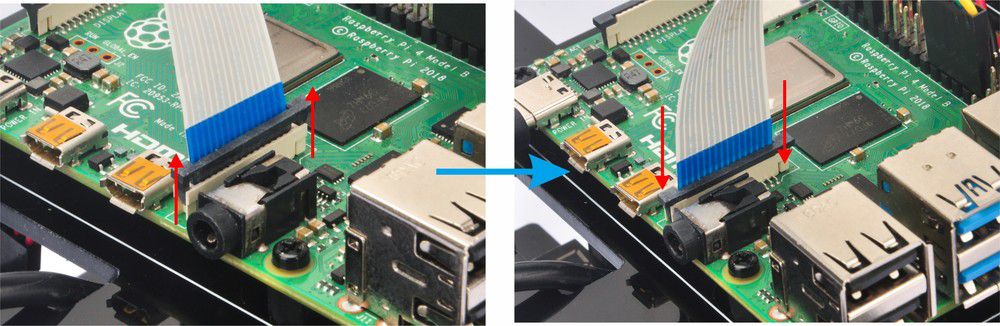
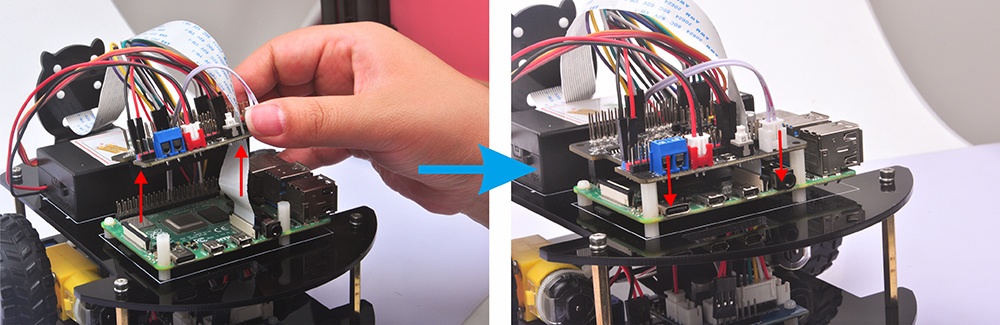
Schritt 2) Verbinden Sie die CSI-Kamera mit dem CSI-Steckplatz des Raspberry Pi mit einem CSI-Flachbandkabel (Bitte achten Sie auf die Anschlüsse des Kabels, bevor Sie es installieren.)
Schritt 1: Stellen Sie sicher, dass Sie rpi.gpio, adafruit-pca9685 und I2C in Lektion 1 installiert haben, und schalten Sie das Roboterauto ein.
Schritt 2: Bitte aktivieren Sie die Kamera im Raspberry Pi, indem Sie den folgenden Befehl eingeben (Hinweis: Wenn Sie BOOKWORM und Trixie OS brennen, müssen Sie die Kamera nicht aktivieren.):
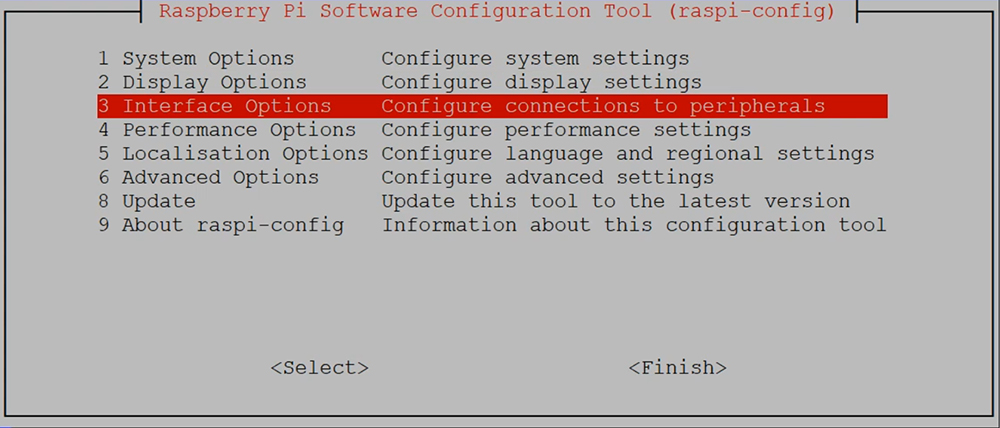
sudo raspi-config
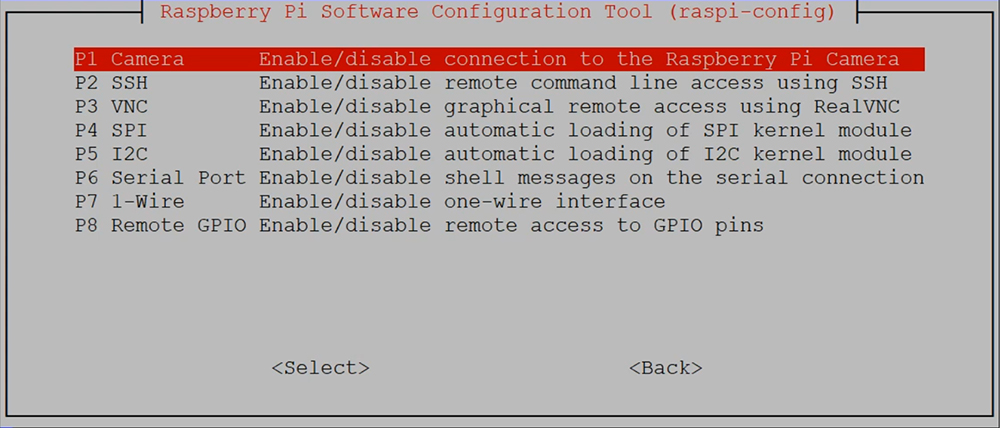
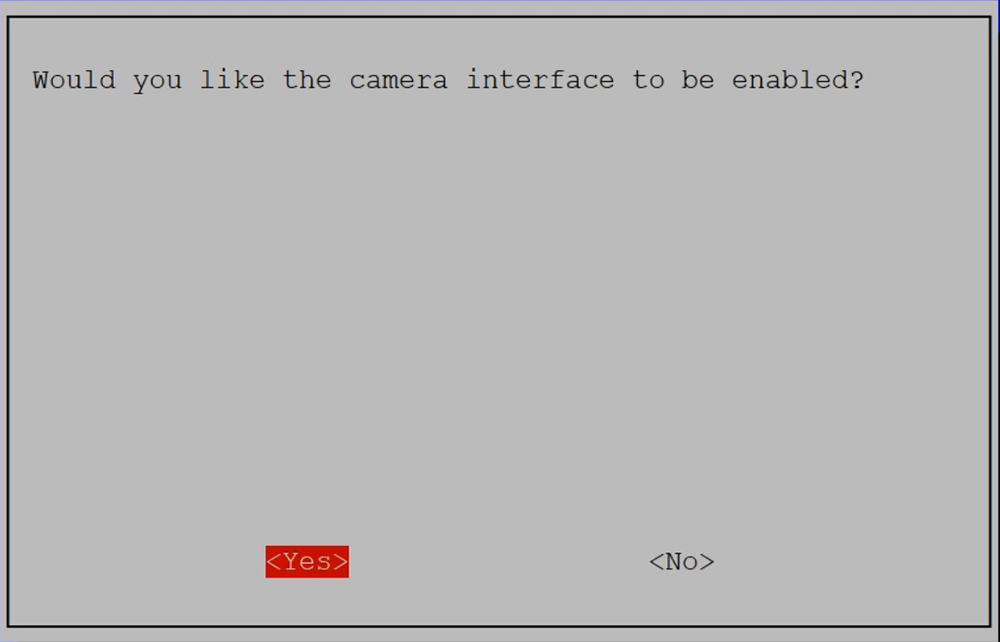
Dann select → Interfacing Options→ Camera→ Yes→ Ok→ Finish (Bitte starten Sie den Raspberry Pi gemäß dem Hinweis neu.)
Schritt 3: Geben Sie den folgenden Befehl ein, um die mjpeg-streamer-Software zu installieren:
wget https://osoyoo.com/driver/picar/camera.sh
Schritt 4: Installieren Sie die Osoyoo Camera Stream Software. Dies ist eine einmalige Installation. Sie müssen die Software nur einmal installieren, indem Sie den folgenden Befehl eingeben:
bash camera.sh
Nach dem Ausführen der obigen Befehle wird die mjpeg-Streamer-Software auf Ihrem Raspberry Pi installiert. So einfach!
HINWEIS: Die Camera Stream Software und bash camera.sh müssen nur EINMAL installiert und ausgeführt werden! Wenn Sie also in Zukunft den Kamerastream ausführen möchten, folgen Sie einfach dem nächsten Schritt (SCHRITT 5) und führen Sie die Datei python startcam.py aus.
Schritt 5: Start Nachdem Sie den Kameraserver installiert haben, können Sie ihn starten, indem Sie den folgenden Befehl in Ihrem Pi-Terminal ausführen:
python startcam.py
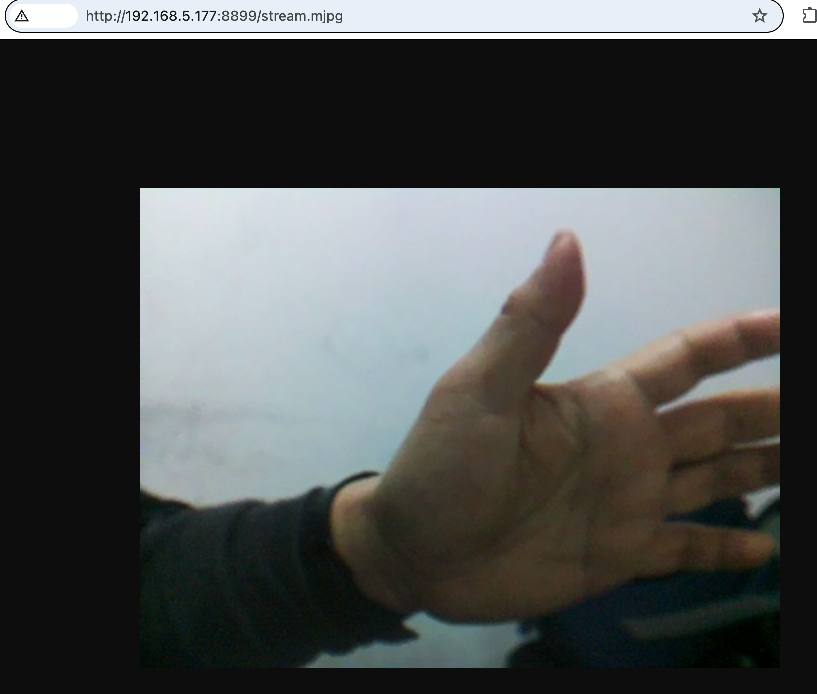
Schritt 7: Jetzt können Sie Ihr Browser verwenden, um das Überwachungsvideo zu testen. Besuchen Sie nun bitte http://your_raspberry_pi_ip:8899/stream.mjpg (in meinem Fall http://192.168.68.227:8899/stream.mjpg), dort sehen Sie das Überwachungsvideo.
METHODE 1: VERWENDEN SIE DEN BROWSER, UM EIN RASPBERRY PI-ROBOTERAUTO ÜBER DAS INTERNET ZU STEUERN
Schritt 1: Öffnen Sie ein neues Terminalfenster und führen Sie den folgenden Code aus, um die OSOYOO-Webcam-gesteuerte Roboterauto-Software zu installieren
wget https://osoyoo.com/driver/picar/picar4.sh
Schritt 2: Geben Sie den folgenden Befehl ein:
bash picar4.sh
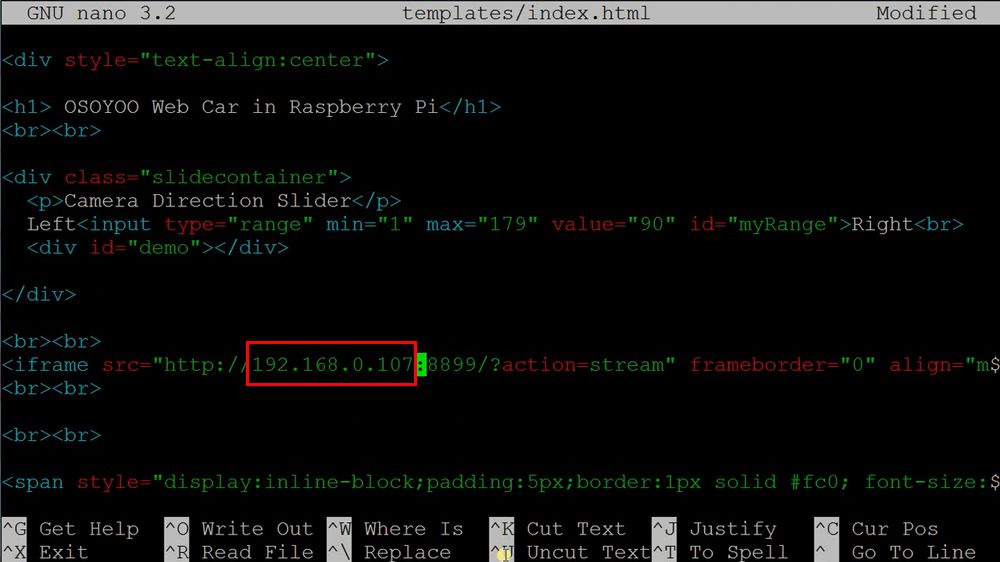
Schritt 3: Geben Sie dann den folgenden Befehl ein, um die Datei templates/index.html
nano ~/piwebcar/templates/index.html
Schritt 4: Bitte ersetzen Sie 10.0.0.23 durch die IP-Adresse Ihres Pi und klicken Sie auf „Strg“+„X“ und dann auf „Y“, um die Datei zu speichern. Klicken Sie anschließend auf „Enter“, um die Datei zu verlassen.
Schritt 5: Stellen Sie das Auto auf den Boden und führen Sie den Code aus, indem Sie den folgenden Befehl eingeben:
sudo python ~/piwebcar/webcar.py
Schritt 6: Öffnen Sie auf Ihrem PC oder Mobiltelefon, das dasselbe Wi-Fi-Netzwerk wie Ihr Raspberry Pi ist, den Browser und besuchen Sie http://your_RaspberryPi_ip_address.
Die Pfeiltasten sind Richtungstasten, die rote Kreistaste in der Mitte ist die STOP-Taste. An der Unterseite befinden sich vier Tasten zur Geschwindigkeitsregelung:
Taste 0 bedeutet die langsamste Geschwindigkeit
— Taste bedeutet die 2. langsame Geschwindigkeit
== Taste bedeutet normale Geschwindigkeit
++ Taste bedeutet höchste Geschwindigkeit
Oben auf der Seite befindet sich ein Schieberegler für die Kamerarichtung, mit dem Sie den Schieberegler verschieben können, um das Servo zu drehen und die Kameraausrichtung zu ändern.
METHODE 2: VERWENDEN SIE DIE APP, UM EIN RASPBERRY PI-ROBOTERAUTO ÜBER DAS INTERNET ZU STEUERN
Schritt 1: Öffnen Sie ein neues Terminalfenster, und führen Sie den folgenden Code aus, um den Beispielcode für das APP-Steuerelement herunterzuladen
Schritt 2: Geben Sie den folgenden Befehl ein, um den Beispielcode auszuführen
python picar-udp-control4.py
Schritt 3) Laden Sie die OSOYOO iot UDP Robot Car Control APP herunter Suchen Sie bei Google Play oder im Apple Store nach den Schlüsselwörtern “OSOYOO IoT UDP Robot APP”, Sie finden eine rote Symbol-APP wie folgt (Hinweis: Wenn Sie diese APP nicht in Google Play finden können, können Sie die APP direkt über den folgenden Link herunterladen: https://osoyoo.com/driver/udp-app.apk):
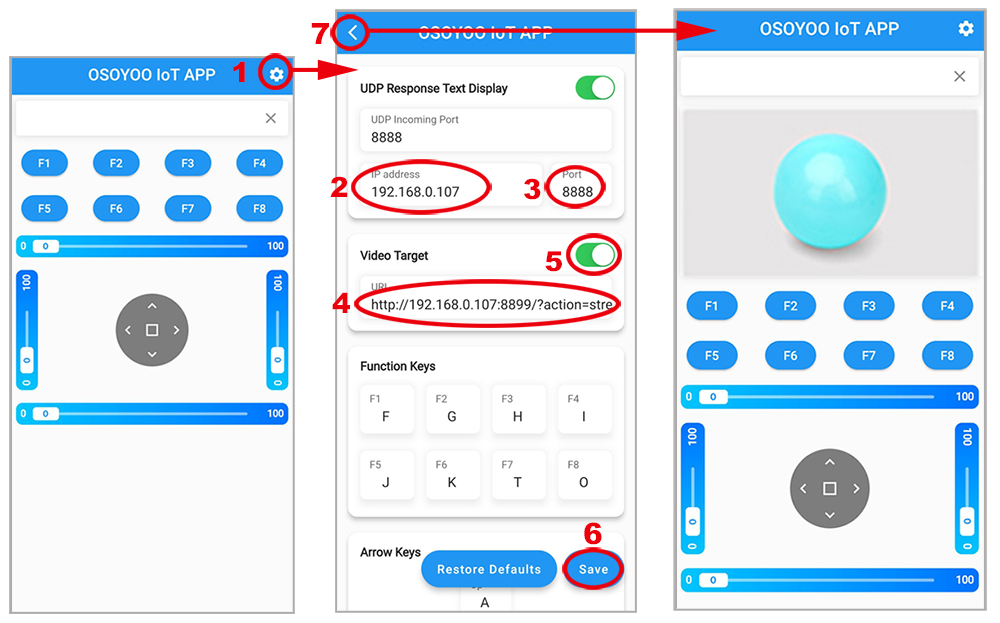
Schritt 4) Verbinden Sie Ihr Telefon mit demselben Router, die Wi-Fi-SSID des Raspberry Pi verwenden. Öffnen Sie die APP, klicken Sie auf “Einstellungssymbol (1)”, um “Einstellungsbenutzeroberfläche” aufzurufen, geben Sie die IP-Adresse für Ihre Raspberry Pi-IP-Adresse und den Port für 8888 ein, geben Sie http://your_raspberry_pi_ip:8899/?action=stream in das Videoziel ein, stellen Sie dann den Videozielschalter auf Grün, klicken Sie dann auf Save und dann auf “Zurück-Symbol(7)”, um die Benutzeroberfläche wie folgt zu steuern:
Schritt 5) Stellen Sie nun das Auto auf den Boden und klicken Sie auf die Richtungstasten < > ^ v, um das Auto in Bewegung zu setzen. Verwendung || Pause-Taste, um die Bewegung des Fahrzeugs zu stoppen.
Der Schieberegler oben auf den Richtungstasten ist ein Schieberegler für die Kamerarichtung, und Sie können den Schieberegler bewegen, um das Servo zu drehen und die Kameraausrichtung zu ändern.
Der Schieberegler links neben den Richtungstasten ist ein Geschwindigkeitsregler, und Sie können den Schieberegler nach oben bewegen, um diesen Roboter zu beschleunigen.
Hinweis: F1~F8 und der untere und rechte Schieberegler sind in dieser Lektion nicht verfügbar.









 ;
;