正規販売店

目的:
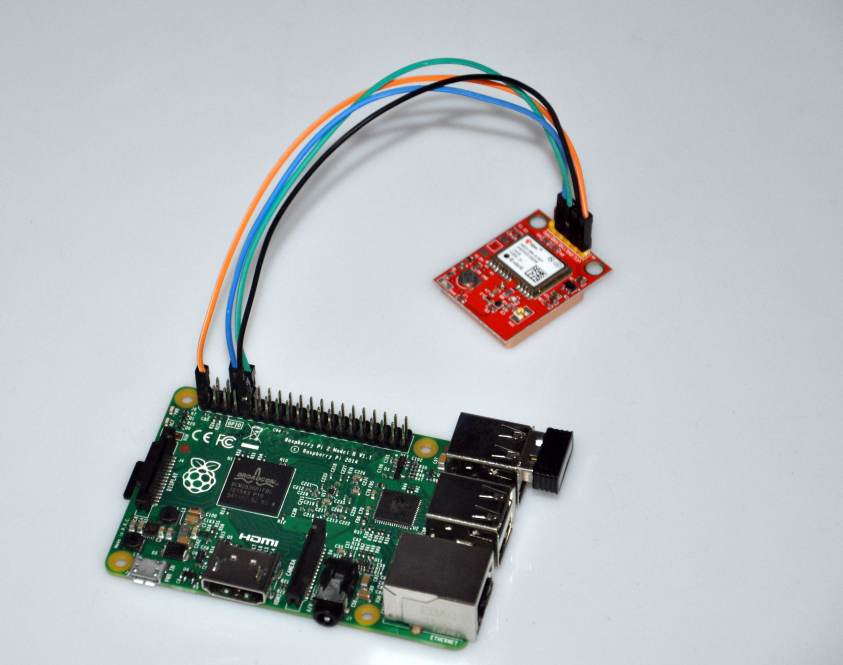
このプロジェクトでは、Raspberry Pi2ボードを使って、U-BLOX NEO-6M GPS
モジュールを作動して、緯度、経度、高度、速度などの情報を確認します。U-BLOX NEO-6M GPS
モジュールはPi3ボードに作動できませんので、ご注意下さい。U-BLOX NEO-6M GPSモジュールの情報は次のリンクでの文章をご参照~ https://osoyoo.com/ja/2016/10/25/use-mega2560-to-drive-gps//
配線図
| Raspberry Piボード |
GPS モジュール |
| 3.3V |
VCC |
| GND |
GND |
| GPIO15 (RXD) |
TXD |
| GPIO14 (TXD) |
RXD |
Raspberry Pi GPIOmap

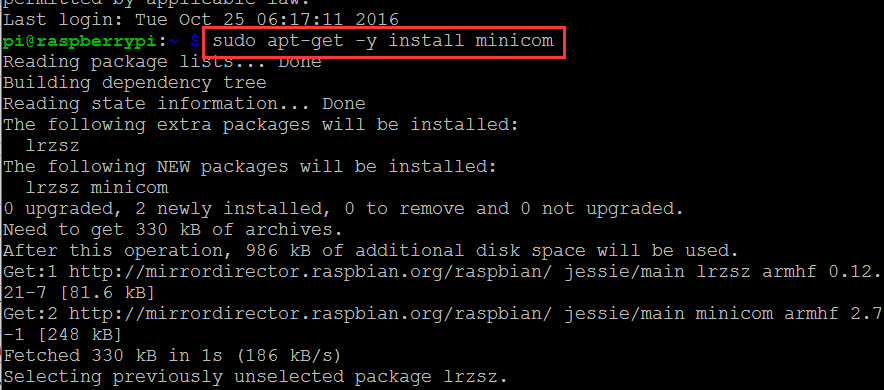
Raspberry Pi terminal windowに下記のコマンドを作動して、「minicom」をインストールします:
sudo apt-get -y install minicom
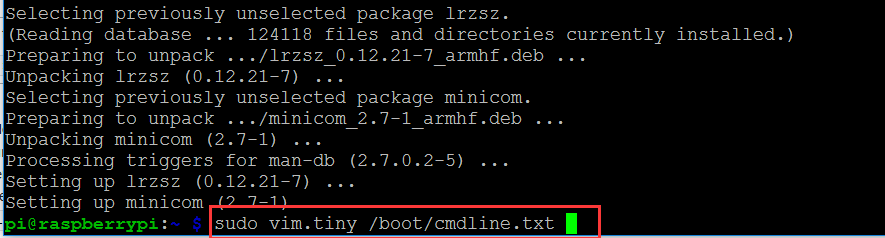
2) ブートメッセージをブロックする
GPSモジュールはシリアルCOMポート使用のため、Raspberry Piからデバッグ情報の送信は遮断必要です。
sudo vim.tiny /boot/cmdline.txt
または
sudo nano.tiny /boot/cmdline.txt
「dwc_otg.lpm_enable=0 console=ttyAMA0,115200 kgdboc=ttyAMA0,115200 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline rootwait」✖
上記のデータが下記の内容を切り替えして、保存して下さい。
「dwc_otg.lpm_enable=0 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline rootwait」
❍
下記のコマンドを作動して、inittabを編集して下さい。
sudo vim.tiny /etc/inittab
「T0:23:respawn:/sbin/getty -L ttyAMA0 115200 vt100」✖
上記のデータが下記の内容を切り替えして、保存して下さい。
「#T0:23:respawn:/sbin/getty -L ttyAMA0 115200
vt100」❍
4)Restart Pi再起動する
sudo reboot
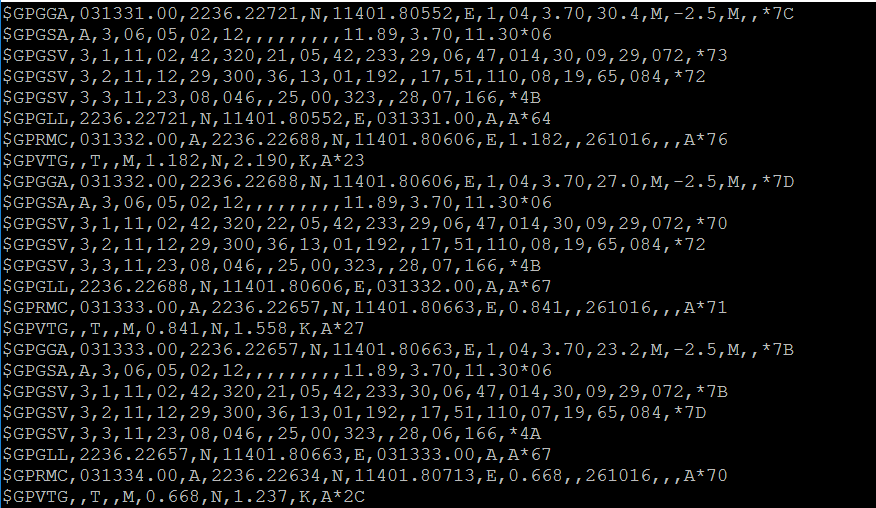
5) 下記のコマンドを作動する
minicom -b 9600 -o -D /dev/ttyAMA0

今からGPS情報が表示できます。