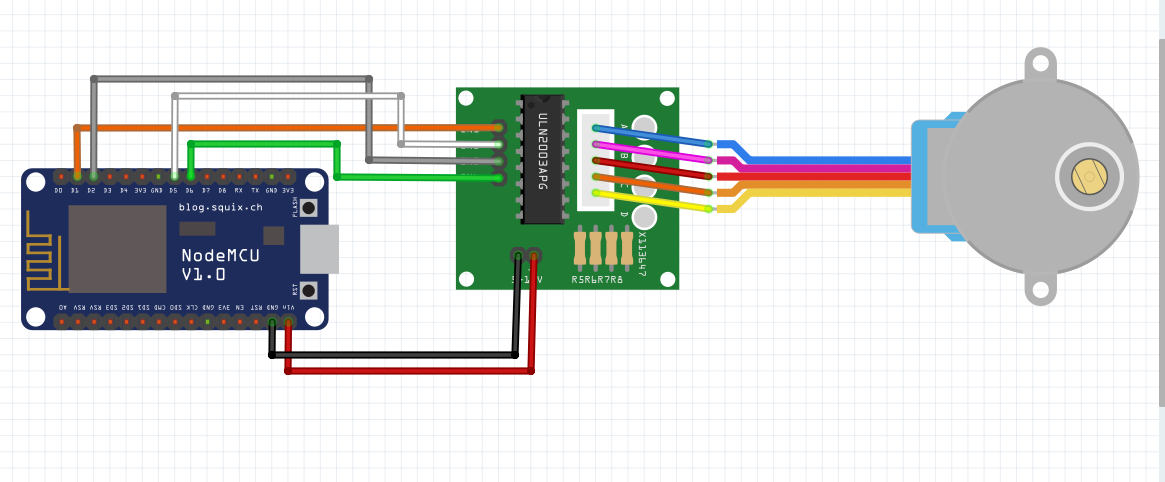
The script works well, but the stepper motor alone while not moving is absorbing 0,3A, and the two A B red leds on the controller are always on.
Is there any way to make it just rest without any power consumption?
I am having the same issue.
The stepper motor is not moving
A and B LEDs are on
The motor is taking in current ant no movement
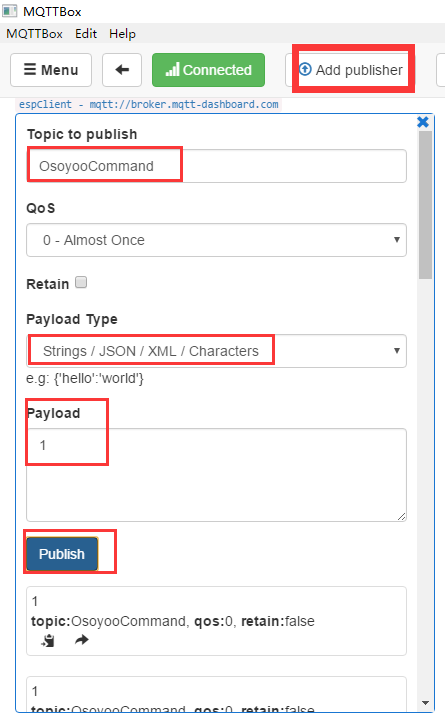
published mqtt payload of 0 to the topic stops the motor from taking current but no matter what I have tried no motion from the motor.
I have changed stepper motor and driver board also tried 2 nodemcu with no luck.
Any help is appreciated.












The script works well, but the stepper motor alone while not moving is absorbing 0,3A, and the two A B red leds on the controller are always on.
Is there any way to make it just rest without any power consumption?
I am having the same issue.
The stepper motor is not moving
A and B LEDs are on
The motor is taking in current ant no movement
published mqtt payload of 0 to the topic stops the motor from taking current but no matter what I have tried no motion from the motor.
I have changed stepper motor and driver board also tried 2 nodemcu with no luck.
Any help is appreciated.