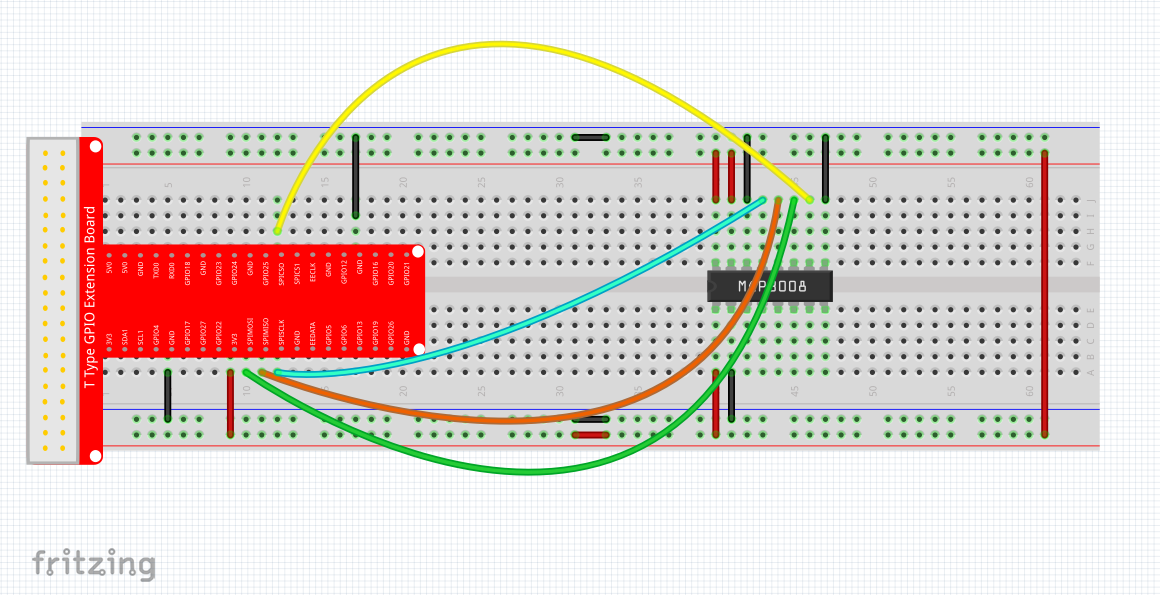
この外部デバイスは、MCP3008アナログ-デジタル変換(ADC)チップです。以前のレッスンで学んだように、Raspberry Piは様々なデジタルセンサーを使用して多くのプロジェクトを実行できます。Arduinoボードとは異なり、Raspberry Piには統合されたADC(アナログ-デジタルコンバータ)がないため、アナログ入力を読み取ることができません。In this lesson, we will use
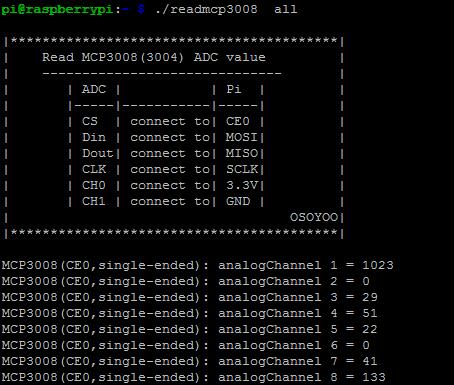
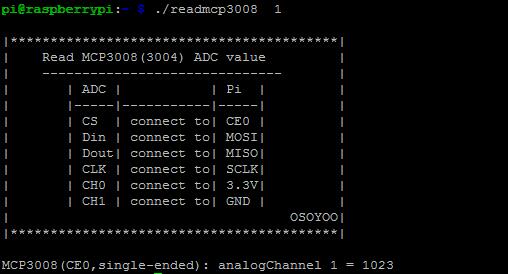
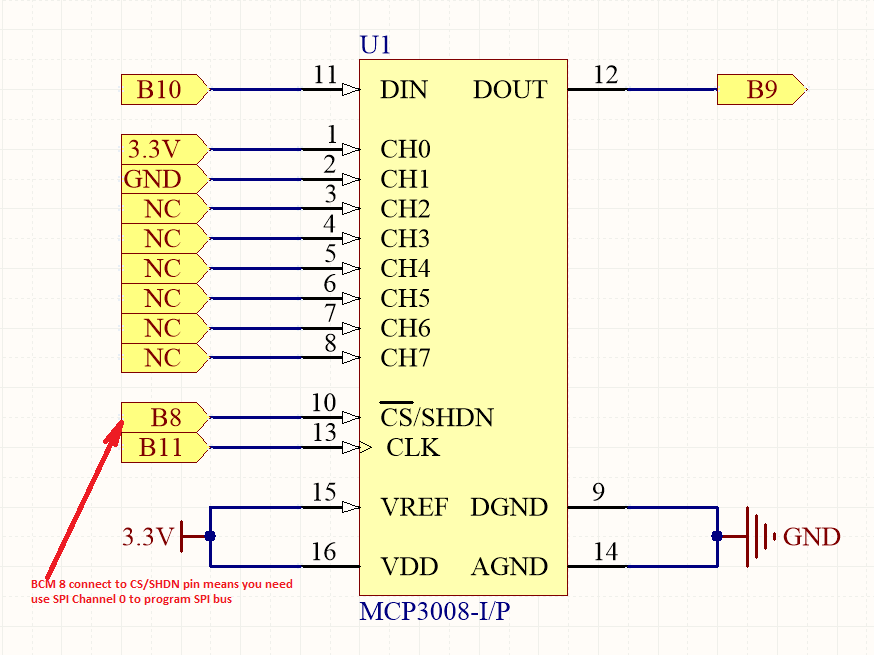
このプロジェクトでは、Raspberry Pi 3.3VとGNDをMCP3008入力チャンネル1および入力チャンネル2として使用します。MCP3008はアナログ信号をデジタル量に変換し、これによりRaspberry Piは、典型的にアナログベースのセンサーによって放出される物理特性の測定値であるアナログ電圧を解釈することができます。
import time
import os
import RPi.GPIO as GPIO
# change these as desired - they're the pins connected from the
# define SPI port on the ADC to the Cobbler
# use BCM 11 as SPI clock signal
SPICLK = 11
#MISO and MOSI are the data pins required by SPI, google it for detail
#use BCM 9 as MISO to accept signal from external SPI output
SPIMISO = 9
#use BCM 10 as MOSI to to send signal to external SPI input
SPIMOSI = 10
#use BCM 8 as SPI CS to enable/disable extern SPI device
SPICS = 8
#DEBUG = 1
#setup function for some setup---custom function
def setup():
GPIO.setwarnings(False)
#set the gpio modes to BCM numbering
GPIO.setmode(GPIO.BCM)
# set up the SPI interface pins
GPIO.setup(SPIMOSI, GPIO.OUT)
GPIO.setup(SPIMISO, GPIO.IN)
GPIO.setup(SPICLK, GPIO.OUT)
GPIO.setup(SPICS, GPIO.OUT)
#print message at the begining ---custom function
def print_message():
print ('|**********************************|')
print ('| Read MCP3008(3004) ADC value |')
print ('| ----------------------------- |')
print ('| | ADC | | Pi | |')
print ('| |-----|-----------|-----| |')
print ('| | CS | connect to| CE0 | |')
print ('| | Din | connect to| MOSI| |')
print ('| | Dout| connect to| MISO| |')
print ('| | CLK | connect to| SCLK| |')
print ('| | CH0 | connect to| 3.3V| |')
print ('| | CH1 | connect to| GND | |')
print ('| ----------------------------- |')
print ('| OSOYOO|')
print ('|**********************************|\n')
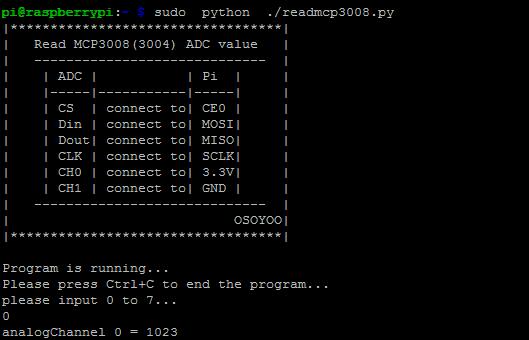
print ('Program is running...')
print ('Please press Ctrl+C to end the program...')
print ('please input 0 to 7...')
# read SPI data from MCP3008 chip, 8 possible adc's (0 thru 7)
def readadc(adcnum, clockpin, mosipin, misopin, cspin):
if ((adcnum > 7) or (adcnum < 0)):
return -1
GPIO.output(cspin, True)
GPIO.output(clockpin, False) # start clock low
GPIO.output(cspin, False) # bring CS low to enable MCP3008
commandout = adcnum
commandout |= 0x18 # start bit + single-ended bit
commandout <<= 3 # we only need to send 5 bits here
#Tell MCP3008 I am getting data from which ADC#
for i in range(5):
if (commandout & 0x80):
GPIO.output(mosipin, True)
else:
GPIO.output(mosipin, False)
commandout <<= 1
GPIO.output(clockpin, True)
GPIO.output(clockpin, False)
#Read SPI data from MCP3008 and save it to variable adcout
adcout = 0
# read in one empty bit, one null bit and 10 ADC bits
for i in range(12):
GPIO.output(clockpin, True)
GPIO.output(clockpin, False)
adcout <<= 1 if (GPIO.input(misopin)): adcout |= 0x1 GPIO.output(cspin, True) adcout >>= 1 # first bit is 'null' so drop it
return adcout
#main function
def main():
#print info
print_message()
analogChannel = int(input())
if (analogChannel < 0) or (analogChannel > 7):
print ('input error analogChannel number!')
print ('please input 0 to 7...')
else:
adc = readadc(analogChannel, SPICLK, SPIMOSI, SPIMISO, SPICS)
print ('analogChannel %d = %d'%(analogChannel,adc))
#define a destroy function for clean up everything after the script finished
def destroy():
#release resource
GPIO.cleanup()
#
# if run this script directly ,do:
if __name__ == '__main__':
setup()
try:
main()
#when 'Ctrl+C' is pressed,child program destroy() will be executed.
except KeyboardInterrupt:
destroy()













 *DIN/DOUTピン
*DIN/DOUTピン