VIDEO
認定オンライン販売業者 >
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
日本
目的
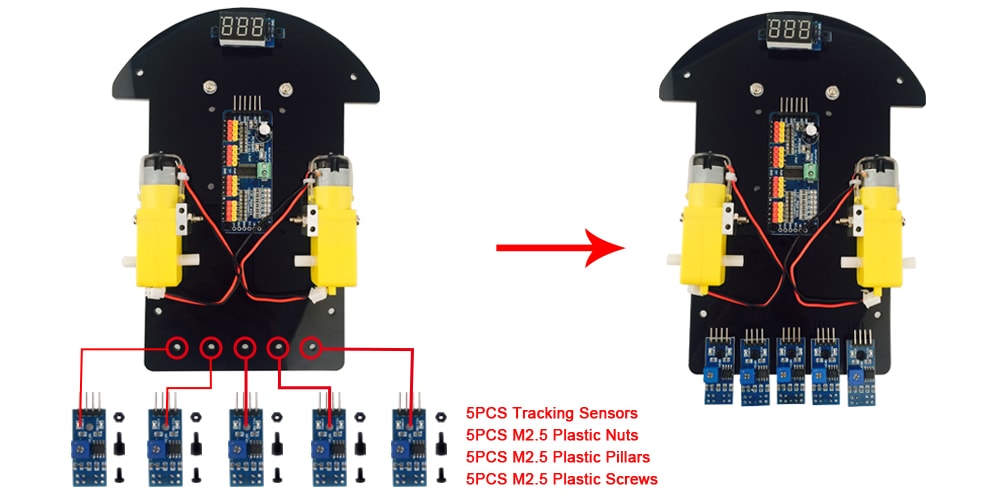
本レッスンでは、黒/白のトラッキングセンサーを使用して、ロボットカーが白い地面にある黒いトラックをトレースしながら走行させます。まだトラッキングセンサーの取付けできていない場合は、Lesson 1. を御確認してください。
(注:レッスン1で取り付けた白黒トラッキングセンサー5個をRaspberry Piに接続する準備を致します)
ハードウェアのインストール
ソフトウェアのインストール
注:
1. すでにlesson1 でイメージOS インストール済みの場合、次のステップ2に進んでトラッキングセンサーモジュールの感度または「トラッキングラインのテスト」のステップへ進み調整を行ってください。
ステップ1: 次の端末コマンドでライントラッキングサンプルコードをダウンロードします(マイクロSDカードにOsoyoo Robot Imageがプリインストールされている場合は、このステップをスキップします):cd ~/osoyoo-robot/ wget http://osoyoo.com/driver/lf.tar.gz tar -zxvf lf.tar.gz
注:上記のコマンドは、サンプルコードファイルをosoyoo-robot / lfディレクトリにダウンロードします
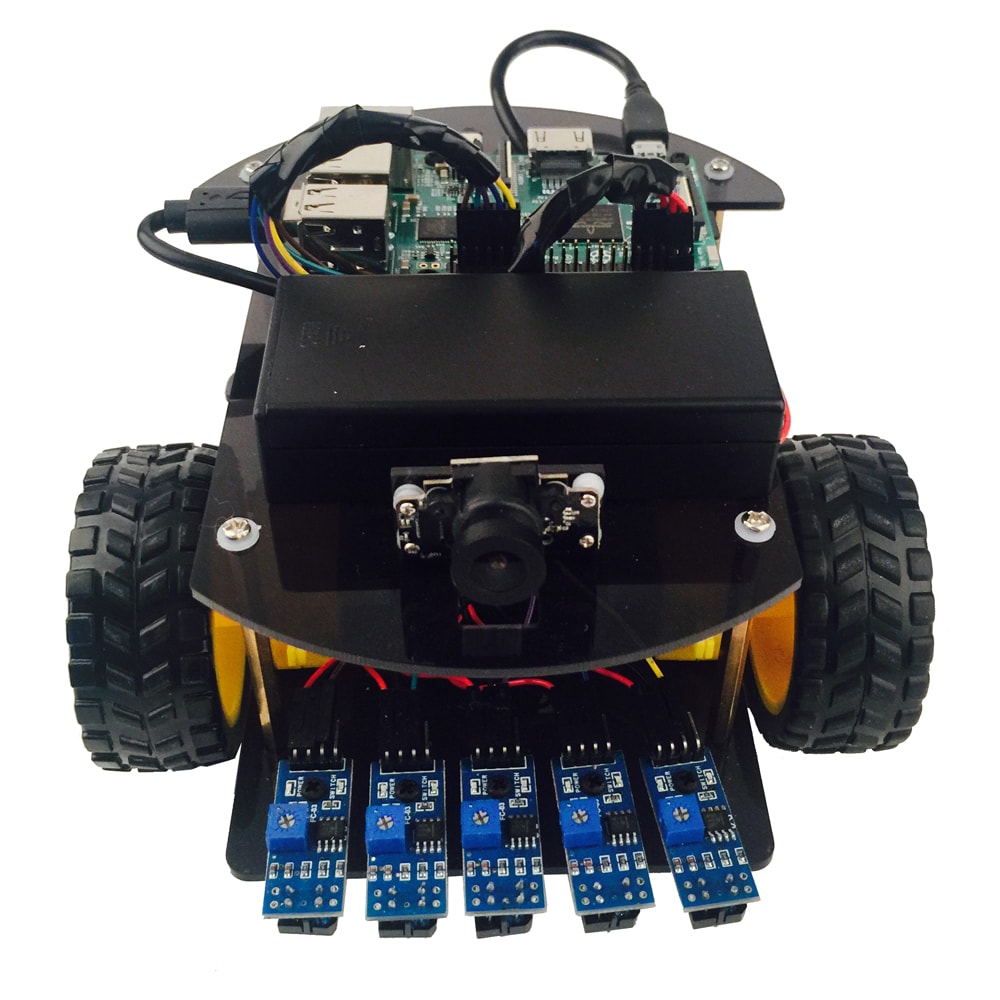
ステップ2:白黒追跡センサーをテストする
車の前端には5つの黒/白のトラッキングセンサーがあります。各センサーには2つのLEDライトがあります。赤いLEDは電源を示します。緑のLEDは黒/白を示します。黒が検出されると、緑のLEDが消灯し、「1」がRaspberry Pi GPIOピンに送信されます。それ以外の場合、LEDが点灯し、「0」が送信されます。
トラッキングモジュールの調整の詳細については、次のvedioをご覧ください。
VIDEO Pythonコードと実験に従うと、センサーが正しくインストールされているかどうかがわかります。 次に、SSHを使用してRaspberry PiをPCからリモートで接続し(Windowsを使用している場合はPuttyを使用)、次の端末コマンドを入力します:
cd ~/osoyoo-robot/lf python test.py
最初のセンサー(右から)を黒いトラックに置くと、緑色のLEDがオフになり、Puttyターミナルウィンドウに次のように00001が表示されます。
これは、Raspberry Piが左の4つのセンサーからWHITE(0)を検出し、右のエッジセンサーからBlack(1)を検出したことを意味します。黒いトラックの位置を右から左のセンサーに1つずつ変更し、結果を00001から00010,00100,01000,10000に変更できます。結果が上記のように表示されない場合は、センサー感度とPiへの接続が正しい。
ライントラッキングのテスト
まず、白い地面に黒いトラックを作ります。トラックはラウンドまたはカーブにすることができますが、各カーブの回転角度は鋭すぎてはなりません。
ユーザーは白いセラミックタイルに貼り付けた幅2cmの黒いテープを使用して、素敵なトラックを作成することをお勧めします。次に、トラックの上に車を置き、バッテリーボックスの電源スイッチをオンにします。
最後に、SSHを使用してPCからRaspberry Piにリモート接続し、次のコマンドを入力します
cd ~/osoyoo-robot/lf
上記のコマンドがraspberry Piに送信された後、車は自動的に黒いトラックに沿って動き始めます。