上中級者様の方々には、GPIOポート番号などの機能をカスタマイズするために、webiopiおよびmjpg-streamerをご自分でインストールすることをお勧めします。この場合、次の手順1〜8を実行してwebiopiをインストールそしてmjpg-streamerを構成します。 初心者様の場合、簡易インストール手順「Raspberry Pi Robot Car Lesson 3:Simple Installation for Web Control Camera」でソフトを書き込み、カメラ画像をお試しください。
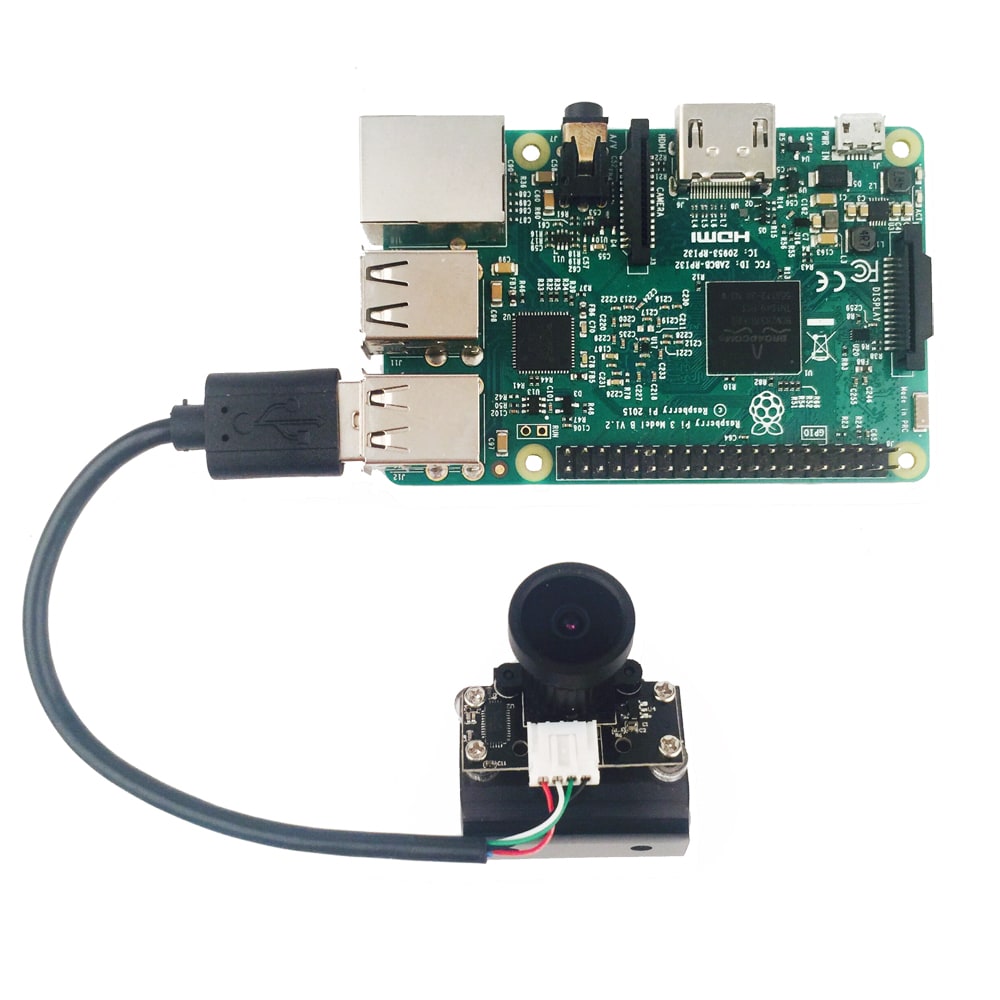
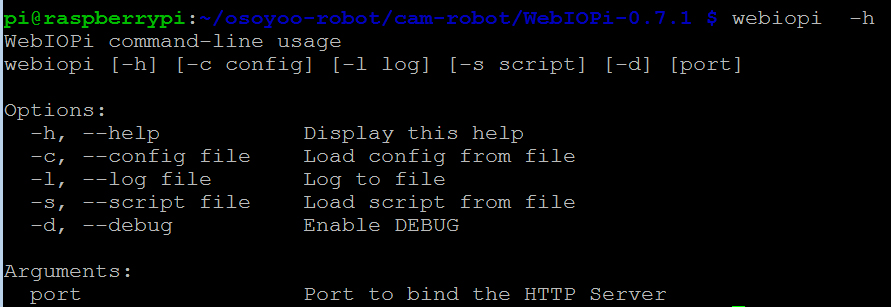
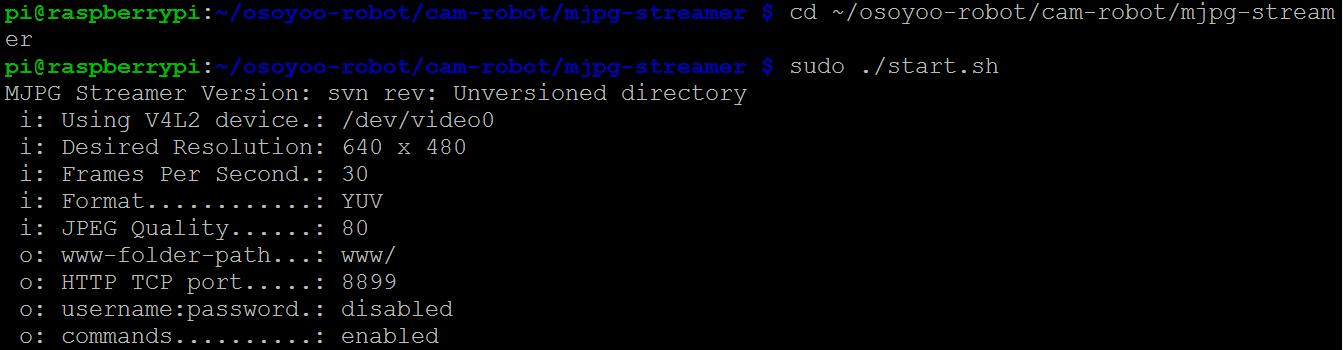
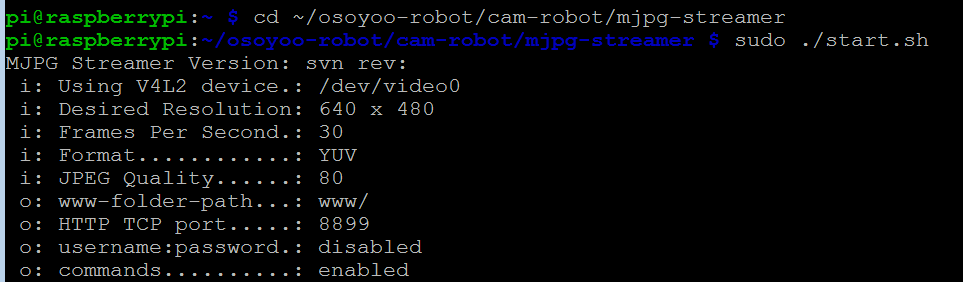
端末に次の結果が表示されます。「/ dev / video0」はPiにインストールされているカメラです
最後に、ターミナルで次のコマンドを入力してmjpg-streamer Serverを実行します:
cd ~/osoyoo-robot/cam-robot/mjpg-streamer
sudo ./start.sh
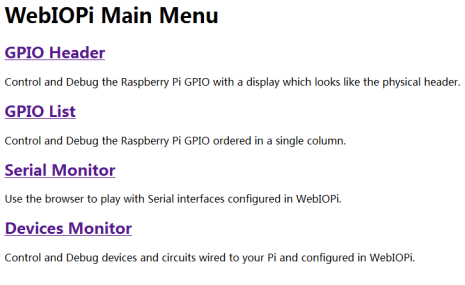
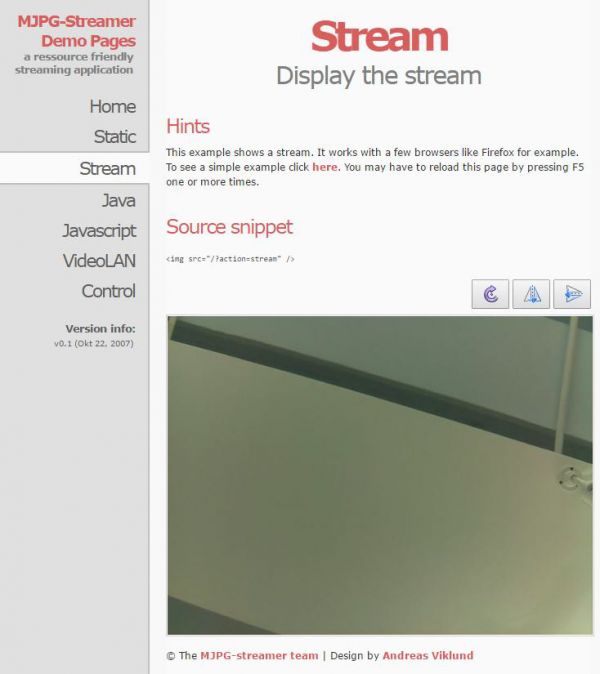
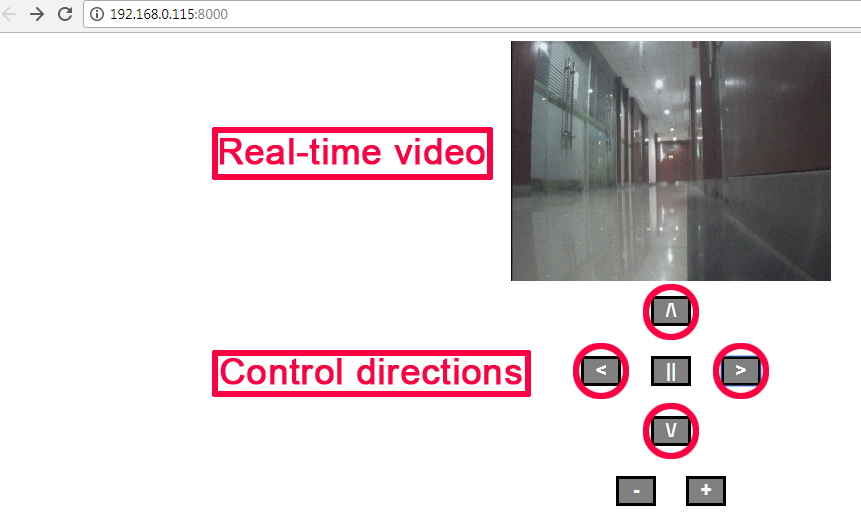
別のコンピューターのブラウザーを使用して、ポート8899でRaspberry Pi IPアドレスにアクセスします(Pi IPアドレスが192.168.0.115の場合、ブラウザーでhttp://192.168.0.115:8899にアクセスします)。次の画像が表示されます。左メニューの[ストリーム]ボタンをクリックすると、Raspberry Piのカメラでキャプチャされたリアルタイムビデオが表示されます。
[SCRIPTS]
# Load custom scripts syntax :
# name = sourcefile
#each sourcefile may have setup, loop and destroy functions and macros
#myscript = /home/pi/WebIOPi-0.7.1/examples/scripts/macros/script.py
myscript = /home/pi/osoyoo-robot/cam-robot/robot/script.py --この行を加える
変更B:次のピンク色の行を追加して、webiopiのデフォルトのhtmlファイルパスを変更します。
# Use doc-root to change default HTML and resource files location
#doc-root = /home/pi/WebIOPi-0.7.1/examples/servo-control
doc-root = / home / pi / osoyoo-robot / cam-robot / robot --この行に変更する
修正C:次のピンク色の行を追加して、PCA9685アドレスを構成に追加します
[DEVICES]]
# Device configuration syntax:
# name = device [args...]
# name : used in the URL mapping
#device : device name
#args : (optional) see device driver doc
#If enabled, devices configured here are mapped on REST API /device/name
#Devices are also accessible in custom scripts using deviceInstance(name)
#See device driver doc for methods and URI scheme available
# Raspberry native UART on GPIO, uncomment to enable
# Don't forget to remove console on ttyAMA0 in /boot/cmdline.txt
# And also disable getty on ttyAMA0 in /etc/inittab
#serial0 = Serial device:ttyAMA0 baudrate:9600
# USB serial adapters
#usb0 = Serial device:ttyUSB0 baudrate:9600
#usb1 = Serial device:ttyACM0 baudrate:9600
#temp0 = TMP102
#temp1 = TMP102 slave:0x49
#temp2 = DS18B20
#temp3 = DS18B20 slave:28-0000049bc218
#bmp = BMP085
#gpio0 = PCF8574
#gpio1 = PCF8574 slave:0x21
#light0 = TSL2561T
#light1 = TSL2561T slave:0b0101001
#gpio0 = MCP23017
#gpio1 = MCP23017 slave:0x21
#gpio2 = MCP23017 slave:0x22
pwm0 = PCA9685slave:0x40 --この行を加える
#pwm1 = PCA9685 slave:0x41
#adc0 = MCP3008
#adc1 = MCP3008 chip:1 vref:5
#dac1 = MCP4922 chip:1