正規販売店

SKU:2018007400
概要
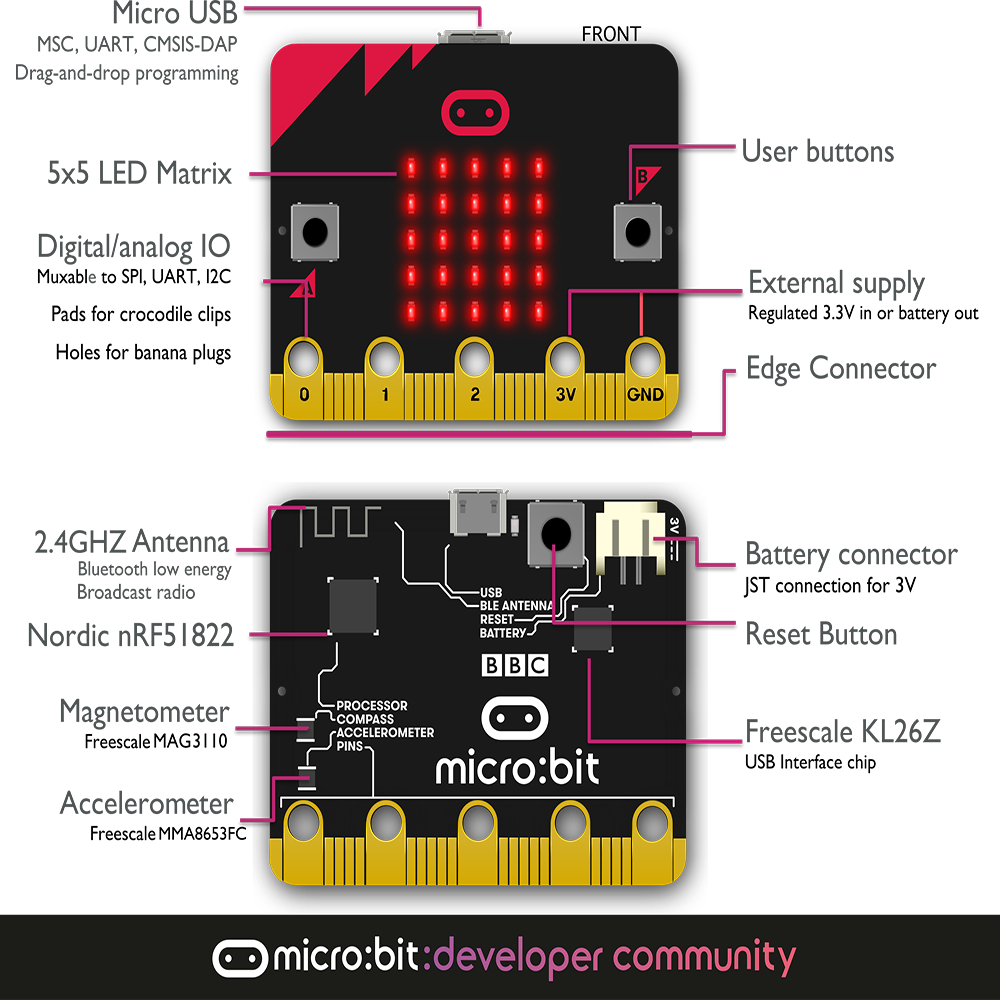
micro:bitのハードウェアをはじめよう
micro:bitのハードウェアは、ARM-mbedプラットフォームがベースになっています。オンチップのペリフェラルを多数搭載したアプリケーションプロセッサを備えています。このチップにはオフチップのペリフェラルも接続されています。アプリケーション・プロセッサに接続されたインターフェース・プロセッサは、USB上の通信を管理し、ドラッグ&ドロップでコードをフラッシュするプロセスをサポートするのが仕事です。インターフェイスプロセッサーは、micro:bitのペリフェラルには一切接続しません。
micro:bitの内部を理解するのに役立つ2つの重要な情報があります:
- 回路図:デバイスの詳細なコンポーネントデータと接続性を示しています。
- リファレンスデザインは、互換性のあるmicro:bitの完全なモジュールデザインで、micro:bitを理解し、独自のバリエーションを設計することに興味がある人の出発点となるよう設計されています。
ハードウェアの説明
NRF51アプリケーション・プロセッサー
nRF51アプリケーション・プロセッサは、ユーザー・プログラムを実行する場所です。ユーザーコード、ランタイムコード、ブルートゥーススタックを含む単一の完全なアプリケーションは、オンチップフラッシュメモリから直接ロードして実行します。ユーザーがアクセスできるすべてのGPIOピンは、このプロセッサによって提供されます。オンボード2.4GHzラジオエンジンがあり、オフチップ空中線経由でBluetooth機能を提供するために使用されます。
Bluetooth 無線通信
オンボードの2.4GHzトランシーバーは、完全修飾されたBluetooth low energyスタックを提供するNordic S110 SoftDeviceを介したBluetooth通信をサポートしています。これにより、micro:bitは、スマートフォンやタブレットを含む幅広いBluetoothデバイスと通信することができます。
| アイテム |
詳細 |
| スタック |
Bluetooth 4.1とBluetooth low energy |
| バンド |
2.4GHz ISM(産業・科学・医療) 2.4GHz…2.41GHz |
| チャンネル数 |
50 2MHzチャンネル、40のみ使用(0~39)、広告3チャンネル(37、38、39) |
| 感度 |
93dBm(Bluetooth low energyモード時 |
| Tx Power |
20dBM~4dBm(4 dBステップ) |
| 役割 |
GAP ペリフェラル |
| 輻輳回避 |
アダプティブ周波数ホッピング |
| プロフィール |
BBC micro:bit プロフィール |
| 詳細は |
こちら |
低レベル無線通信
オンボードの2.4GHzトランシーバーは、独自のNordic Gazellプロトコルを含む、他の多くの無線通信規格をサポートしています。このプロトコルは、他のmicro:bitデバイスなど、この独自プロトコルをサポートする他のデバイス間で、非常にシンプルなスモールパケット放送の無線インターフェイスを提供します。micro:bitの多くの言語に登場する「ラジオ」インターフェースは、このGazellプロトコルの上に構築されています。さらに、micro:bitランタイムソフトウェアは、各データペイロードに「グループコード」を追加し、ユーザーが管理する簡単なデバイスのアドレッシングとフィルタリングを行うことができるようにします。
| アイテム |
詳細 |
| プロトコル |
Nordic Gazell |
| 周波数帯域 |
2.4GHz |
| チャンネルレート |
1Mbps または 2Mbps |
| 暗号化 |
None |
| チャンネル |
101 (0..100) |
| グループコード |
255 |
| Tx power |
0(-30dbm)~7(+4dbm)の範囲で8種類のユーザー設定が可能です |
| ペイロードサイズ |
32(標準) 255(再設定した場合) |
| 詳細は |
こちら |
micro:bitの前面にある2つのボタンと、背面にある1つのボタンは、タクティカルモーメンタリプッシュトゥメイクボタンになっています。背面のボタンは、KL26インターフェースプロセッサと、システムリセット目的でnRF51プロセッサに接続されています。つまり、USBからの電源供給かバッテリーからの電源供給かに関係なく、アプリケーションはリセットされることになります。
フロントボタンAおよびBは、任意の目的のためにユーザーアプリケーションでプログラムすることができます。AおよびBはソフトウェアによってデバウンスされ、短押し、長押し、および「A+B両方」押しの検出も含まれます。ボタンは典型的な反転電気モードで動作し、プルアップ抵抗により、ボタンが離されたときに論理「1」、ボタンが押されたときに論理「0」を保証します。AボタンとBボタンの両方は、micro:bitエッジコネクタでもアクセス可能なGPIOピンに接続されています。
| アイテム |
詳細 |
| タイプ |
2触覚ユーザーボタン、1触覚システムボタン |
| デバウンス |
(A、B)ソフトウェアデバウンス、54ms周期 |
| プルアップ |
(A、B)外部4K7、(システム)10K |
ディスプレイはLEDの5×5配列です。micro:bitには3×9のマトリックスとして接続されています。ランタイムソフトウェアは、このマトリックスを高速で繰り返し更新し、ユーザーの視覚の持続範囲に収まるようにし、フリッカーを検出しないようにしています。このLEDマトリックスは、LED駆動ピンの一部を繰り返し入力に切り替え、周囲光レベルにほぼ比例する電圧減衰時間をサンプリングすることで、周囲光を感知するためにも使用されます。
| アイテム |
詳細 |
| タイプ |
小型表面実装赤色LED |
| 物理構造 |
5×5マトリックス |
| 電気構造 |
3×9 |
| インテンシティコントロール |
10段階 |
| 強度範囲 |
TBC |
| 感知 |
ソフトウェアアルゴリズムによるセンシング環境光推定 |
| 検知範囲 |
TBC、オフからフルオンまで10段階 |
| 色感度 |
赤中心、赤は700nm |
加速度センサーは、3軸のセンシングを行う別チップです。また、ハードウェアで一部のオンボードジェスチャー検知(転倒検知など)、ソフトウェアアルゴリズムによる追加ジェスチャー検知(ロゴアップ、ロゴダウン、シェイクなど)も備えています。I2Cバス経由でアプリケーションプロセッサーに接続されています。
| 項目 |
内容 |
| モデル |
Freescale MMA8653FC |
| 特徴 |
3軸、2/4/8gレンジ |
| 解像度 |
10ビット(0..1023) |
| 最大出力データレート |
800Hz |
| オンボードジェスチャー |
‘freefall’ |
| その他のジェスチャー |
ランタイムのソフトウェアアルゴリズムによって実装される |
マグネトメーター
磁力計は、磁場強度のセンシングを提供する別個のチップです。標準ランタイムのソフトウェアアルゴリズムは、オンボードの加速度計を使用して、これらの読み取り値をボード方向に依存しないコンパスの読み取り値に変換します。コンパスは使用前に較正する必要があり、較正プロセスはランタイムソフトウェアによって自動的に開始されます。このデバイスは、I2Cバスを介してアプリケーションプロセッサに接続されています。
温度センサー
nRF51アプリケーション・プロセッサは、オンボードのコア温度センサを搭載しています。これは、標準ランタイムソフトウェアを介して公開され、周囲温度の推定値を提供します。
| 項目 |
内容 |
| タイプ |
on-core nRF51 |
| 検出範囲 |
-25C .. 75C |
| 分解能 |
0.25C steps |
| 精度 |
+/-4C (未校正) |
| 詳しくは |
こちら |
エッジコネクタは、アプリケーションプロセッサの多くのGPIO回路を引き出しています。これらの回路の一部はmicro:bitの他の機能と共有されていますが、一部のソフトウェア機能をオフにすれば、これらの余分な回路の多くは汎用的な用途に再割り当てすることができます。注:nRF51のデータシートでは、GPIOピンは標準駆動(0.5mA)および高駆動(5mA)モードにすることができ、一度に最大3つのピンが高駆動モードになると記載されています。
| 項目 |
詳細 |
| リング |
大型IOリング3個、大型パワーリング2個、4mmプラグ、クロコダイルクリップ対応 |
| GPIO機能 |
19個のGPIOピンが割り当て可能 |
|
2がオンボードI2Cインターフェースに割り当てられる |
|
6個は表示または光検知機能に使用されます。 |
|
2はオンボードボタン検出用に使用 |
|
1はアクセシビリティインタフェースのために予約されています |
|
19は、デジタル入力またはデジタル出力として割り当てることができます。 |
|
19は最大3つの同時PWMチャンネルに割り当てることができます。 |
|
19は、1つのシリアル送信チャンネルと1つのシリアル受信チャンネルに割り当てることができます |
|
6をアナログ入力端子として割り当てることができます |
|
3はオプションのSPI通信インターフェースに割り当てることができる |
|
3つのタッチセンシング入力は同時に3つまで割り当てることができます |
| ADC分解能 |
10ビット(0…1023) |
| Edge Connector |
エッジコネクターデータシート |
| ピッチ |
1.27mm、80ウェイ両面 |
| パッド |
パッド5枚、4mmホール付き |
| 詳しくは |
こちら |
電源
micro:bitへの電源供給は、USB接続、インターフェースチップ(オンボードレギュレータを搭載)、または上部のコネクタに接続されたバッテリーから行うことができます。また、底面の3Vパッドからmicro:bitに電源を供給することも可能です(注意が必要です)。底面の3Vパッドは、外部回路に少量の電力を供給するために使用することができます。
| 項目 |
詳細 |
| 動作範囲 |
1.8V .. 3.6V |
| USB電流 |
120mA 以下 |
| オンボードペリフェラルバジェット |
30mA |
| バッテリーコネクター |
JST X2B-PH-SM4-TB |
| バッテリー電流 |
TBC |
| エッジコネクタから供給される最大電流 |
90mA |
| 詳しくは |
こちら |
インターフェイス
インターフェースチップはUSB接続を処理し、micro:bitに新しいコードをフラッシュしたり、メインコンピューターとシリアルデータを送受信するために使用されます。
USBコミュニケーションズ
micro:bitは、インターフェースチップのファームウェアに組み込まれたオンボードUSB通信スタックを搭載しています。このスタックにより、アプリケーションプロセッサにコードをロードするために、MICROBITドライブにファイルをドラッグ&ドロップする機能が提供されます。また、micro:bitアプリケーションプロセッサと外部ホストコンピュータとの間でUSBを介してシリアルデータをストリーミングすることができ、アプリケーションプログラムのホストデバッグのためのCMSIS-DAPプロトコルをサポートしています。
デバッギング
インターフェイスプロセッサーは、アプリケーションプロセッサー上で実行されているコードをデバッグするために、特別なホストツールと共に使用することができます。これは、4本の信号線を介してアプリケーションプロセッサに接続されます。KL26インタフェース・プロセッサのコードは、内蔵のSWDソフトウェア・デバッグ・インタフェースを介してデバッグすることもできます。例えば、製造時にこのプロセッサに初期ブートローダ・コードをロードしたり、失われたブートローダを回復したりするために使用します。
| 項目 |
詳細 |
| プロトコル |
CMSIS-DAP |
| オプション |
JLink/OB(別ファームウェア経由) |
| 詳しくは |
こちら |
メカニカル
micro:bitの2Dおよび3DのCAD図面やモデル(重要な寸法をすべて含む) を用意しています。これらのモデルは、micro:bitのマーケティングやプロジェクトイメージを作成するための基礎として、また、3Dプリントなどでアタッチメントを正確に製造するための基礎として使用することができます。
| 項目 |
詳細 |
| 寸法 |
5cm(w) 4cm(h) |
| 重量 |
5g |
リンク集
回路図
リファレンスデザイン
Nordic NRF51データシート
フリースケールKL26リファレンスマニュアル
フリースケールKL26Zデータシート
フリースケールMMA8652加速度センサーのデータシート
フリースケール・マグ3110磁力計データシート
技術仕様1
技術仕様2
安全に関するアドバイス
I2C仕様
SPI「仕様」
ARM mbedの概要
Fritzingの図(Kok Ho Huen氏寄稿









