In this lesson, we will use Mobile to control our robot car and make an imitation driving. Since is a mock driving, we will use a virtual steering wheel and gear in our APP to imitate their counterparts in real car.
Step 1: Install the smart car basic frame work as per Smart Car Lesson 1 . If you have already completed installation in Lesson 1 , please remove all wires on Osoyoo Uno R3 board
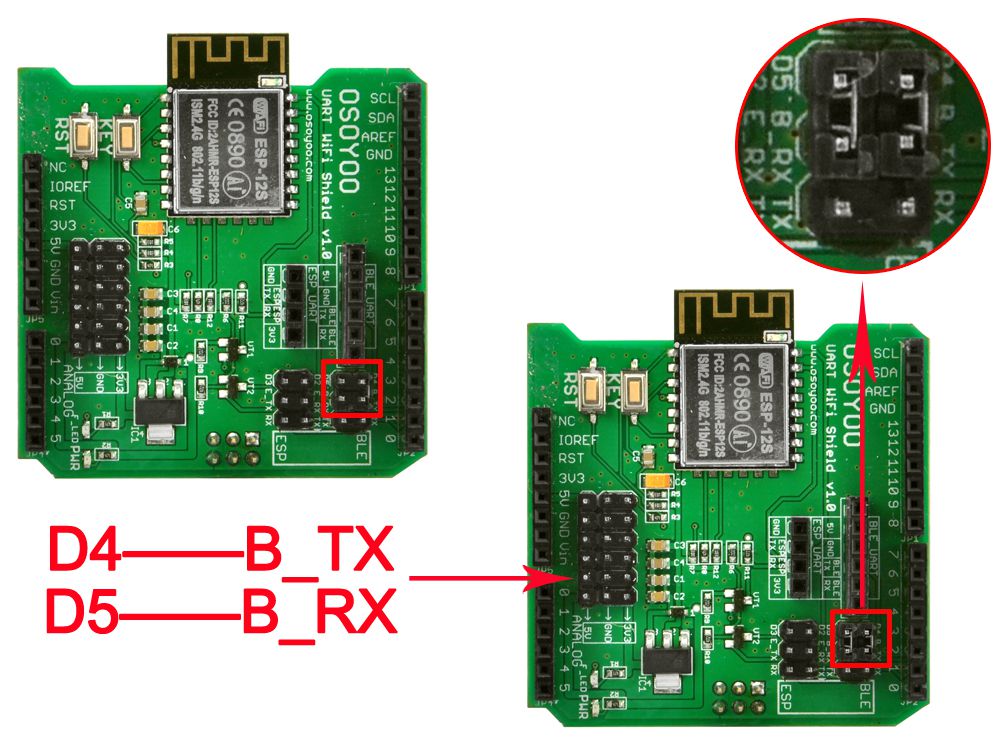
Step 2: Connect Bluetooth TX/RX ports to D4,D5 with jumper caps
Note: Our WIFI Shield Bluetooth TX/RX ports are connected to D4,D5 with jumper cap by default. If you find the Bluetooth TX/RX ports is not connected to D4,D5, you need use a jumper cap or female to female jumper wire to connect B-TX to D4 and B-RX to D5
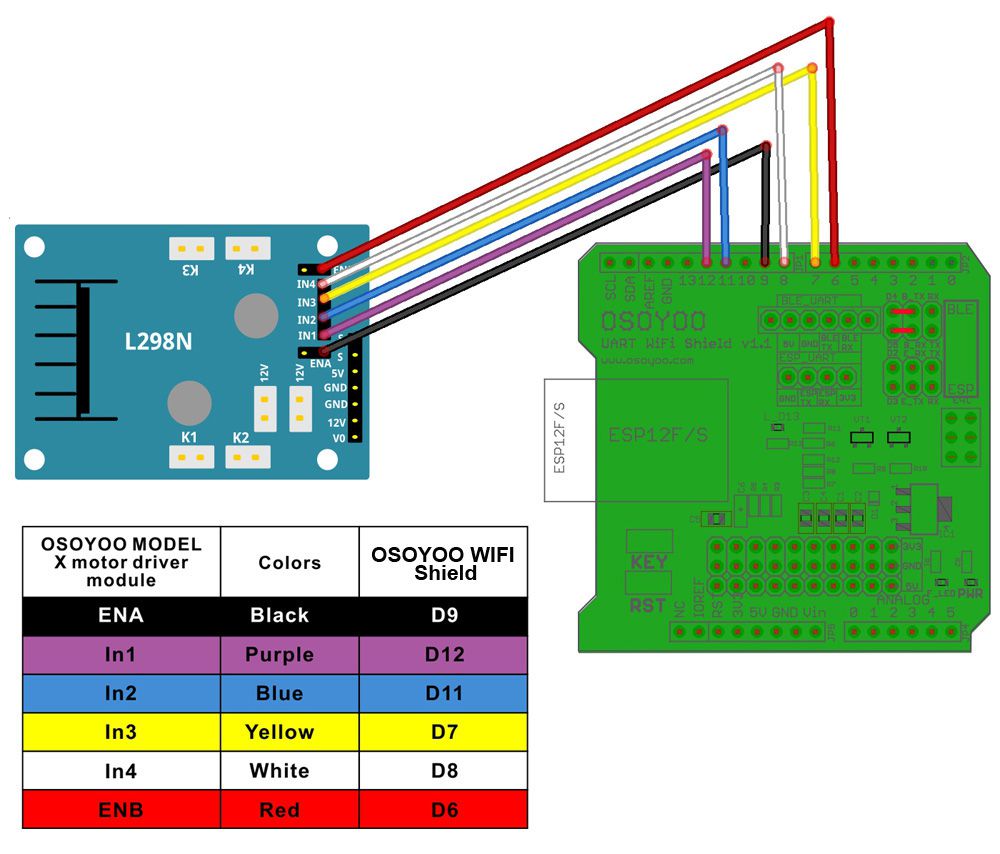
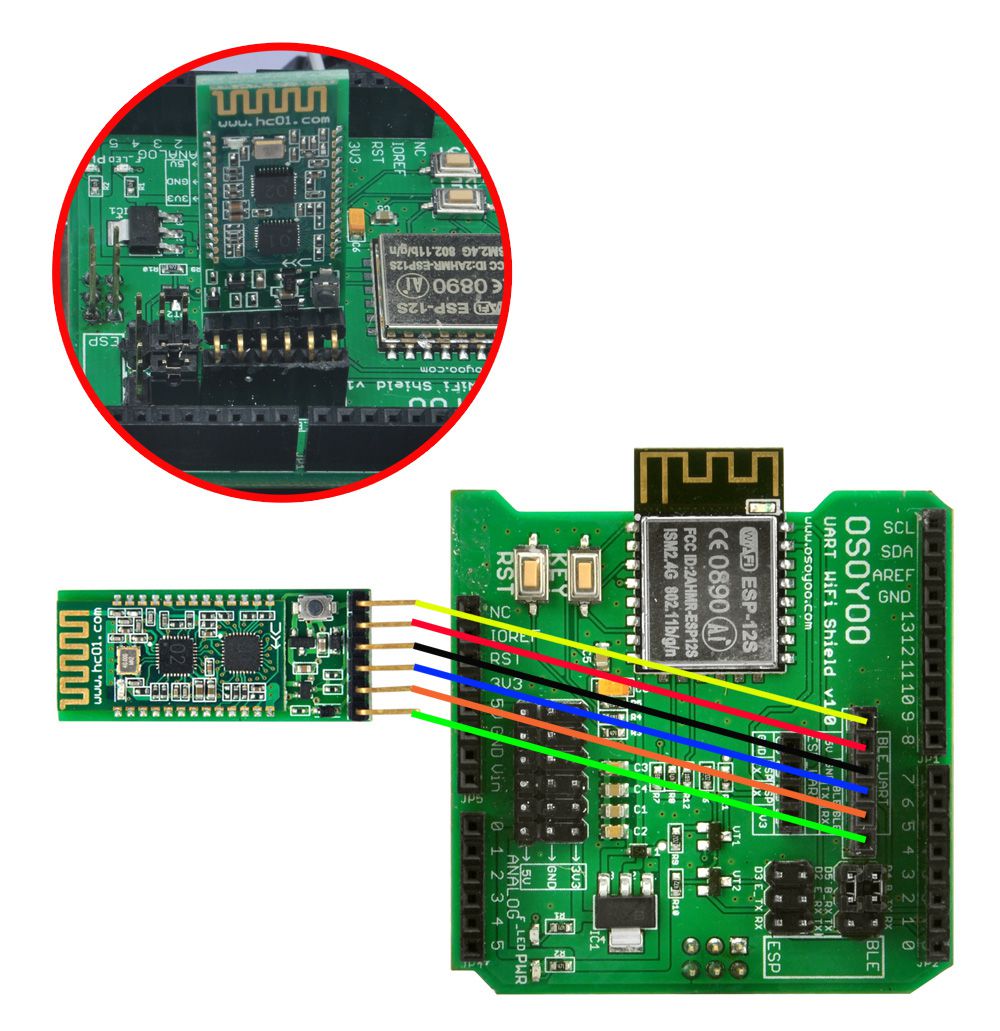
Step 3:Insert to Osoyoo WIFI Shield onto your UNO board and connect OSOYOO MODEL X motor driver module and OSOYOO Wifi Shield as following graph:
Remember following tips restore your motor control system to lesson 1:
If your last project is lesson 1,2,3,4, your motor control system is same as Lesson 1, no need do anything.
If your last project is lesson 5,6, you need change ENA wire from D3 to D9, keep wiring in D6,D7,D8,D11,D12 at same position and remove all other wires in アルドゥイーノ.
I suggest you run the sketch code in Lesson 1 and make sure motor connection is correct. This is very important for next steps.
Step 4: Insert Bluetooth Module into Osoyoo WIFI Shield Bluetooth slot as following graph:
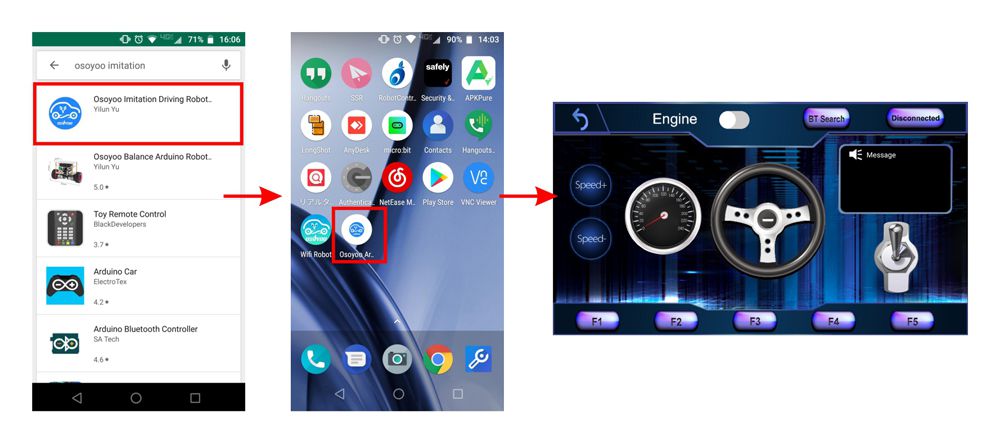
search “OSOYOO imitation driving” in
Google Play Google Play or Apple APP store
Step 1: Install APP into your mobile phone:
Go to your Apple APP store and search APP name “OSOYOO imitation driving”, Download the APP as following and install it in your smart phone.
Step 2: Download and install アルドゥイーノsketch code from v2smartcar-lesson7. Unzip this file, and you will see a folder called v2smartcar-lesson7. Open アルドゥイーノIDE -> click file -> click Open -> choose code “v2smartcar-lesson7.ino” in v2smartcar-lesson7 folder, load the code into アルドゥイーノ(Notice: Shut off your battery or Unplug your power adapter when upload sketch code to アルドゥイーノ.)
Now you have installed your hardware and software for this lesson, let’s drive our car!
Drive your Robot Car Step 1)Put your robot car onto the ground and turn on the battery switch.
Step 2)Go to your mobile phone ->Setting ->Bluetooth setting and search a Bluetooth device called HC-02, pair it with code 1234
Step 3)Open OSOYOO imitation driving Robot APP, Click BT Search button and find the bluetooth you have paired
Step 4)Turn on Engine toggle, and When you rotate your mobile phone angle, your car will change direction.
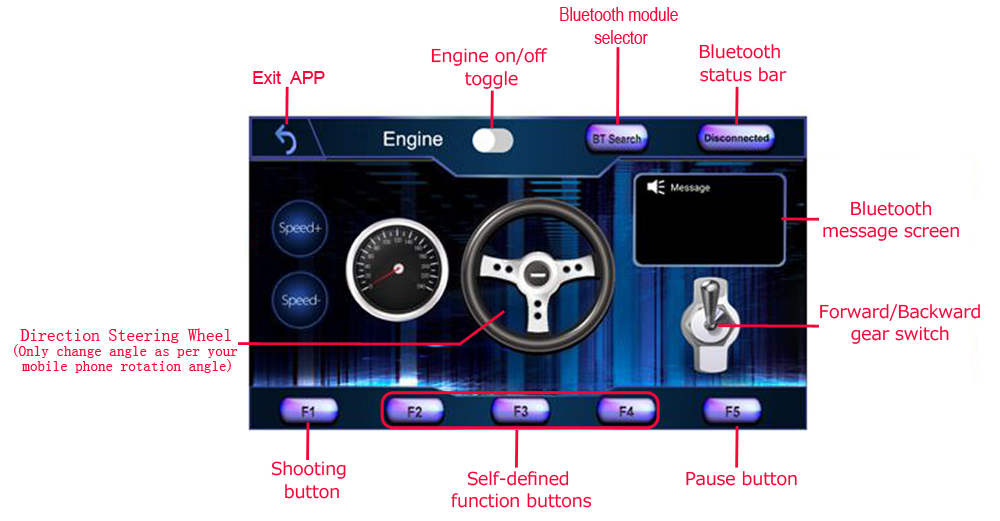
Explanation of APP UI
BT Search button: When click this button, you will see a Bluetooth device list which has been paired with your APP. Select HC-02 device to connect the car. Once HC-02 is connected, Bluetooth Status will change from Disconnected to Connected. You can only control your car when Bluetooth is connected.
Engine toggle : When Engine toggle is set to OFF(white), car will stop and all buttons in the APP will be disabled. When Engine toggle is set to ON(red), car will start to move. All other movement control buttons will active.
Forward/Backward gear switch: This gear switch can control the car is moving ahead or reverse like real car gear.
F1,F2,F3,F4,F5 customized button. In this lesson, we only use F5 which pause the the car movement. The difference between F5 and Engine OFF button is that Engine OFF button when touched, all other buttons will be disabled. You should toggle Engine button again to enable other button. On the other hand, when F5 is clicked, the car will stop but all other buttons is still active. Even you do not touch any button just change your cell phone angle position(like you move the steering wheel), the car will move again.
Direction Steering Wheel : When you rotate your mobile phone angle, the steering wheel will change angle as per your mobile phone rotation angle. This will make your car change direction. For example, when steering wheel make clockwise rotation, car will move to left. Remember, the steering and Forward/Backward gear should work together same as you are driving a real car. For example, when you want back your car to a right side packing lot, you need set Gear to R position and rotate your steer to count-clockwise direction.
















what happens when i plug in the buzzer module, it starts to make low beeping sounds? what does it mean?
buzzer is no needed in this lesson. You can remove the wires on the buzzer.