



| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
日本 |
 |
 |
 |
 |
 |
 |
 |

本レッスン3では、レッスン1で完成させたロボットカーに3ポイントトラッキングセンサーモジュールを追加取り付けします。このレッスンのソフトウェアは、3ポイントトラッキングセンサーモジュールからデータを読み取り、スマートカーが自動的に黒ラインに沿って走行するように制御致します誘導します。白い地面の線路。

OSOYOO マカナムホイールロボットカーシャーシx 1(2xleft-wheels / 2xright-wheelsおよびMotor x 4)
Arduino UNO / Mega2560と完全に互換性のあるOSOYOO Mega2560ボードx 1
OSOYOO V1.0 Wifiシールドx 1
OSOYOO Model Xモータードライバーx 2
OSOYOO 3 ポイントトラキングセンサーモジュール x 1
OSOYOOバッテリーボックスx 1
18650バッテリー(3.7V)x 2

本レッスンを続ける前に、lesson 1 (assembling the car)を完成させる必要があります。
レッスン3で作成したロボット車にトラッキングセンサーモジュールを追加取付配線をいたします。

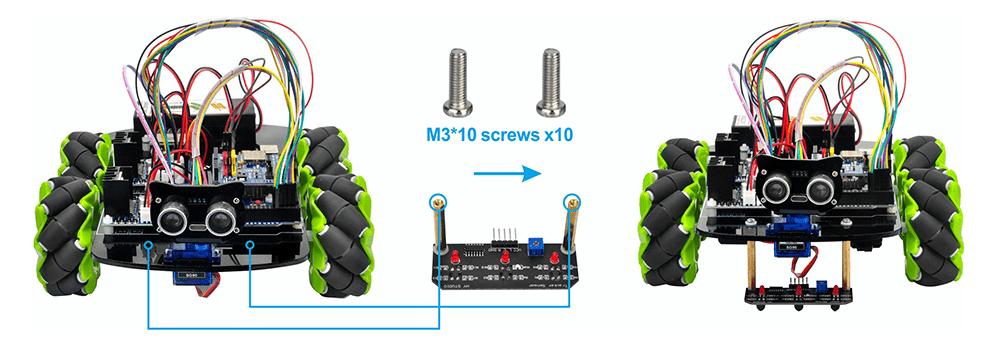

Lesson 1 の以前のステータスからインストールを開始します。
レッスン1をインストールした場合、何も変更する必要はありません。またハードウェアのワイヤ接続もそのままです。
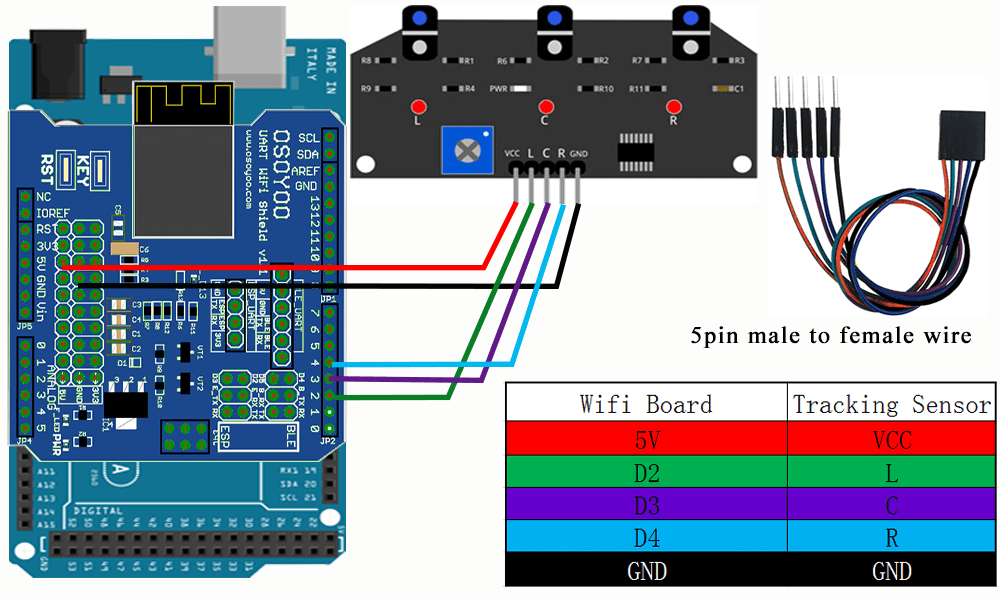
トラッキングセンサーモジュールのVCCピンを5VのWiFiシールドに接続します。
トラッキングセンサーモジュールのGNDピンをwifiシールドのGNDに接続します
次の写真に示すように、L、C、RピンをD2、D3、D4に5ピン20cmメス-メスケーブルで接続します(レッスン1で取り付けた既存のワイヤを取り外さないでください)。

ステップ1:最新のArduino IDEをインストールします(バージョン1.1.16以降のArduino IDEを使用している場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=enからArduino IDEをダウンロードし、ソフトウェアをインストールします。
ステップ2:https://osoyoo.com/driver/mecanum/mecanum-2560-lesson3.zipをダウンロードして、lesson3.zipファイルを解凍lesson3.zip、lesson3と前のフォルダが生成、表示されます。
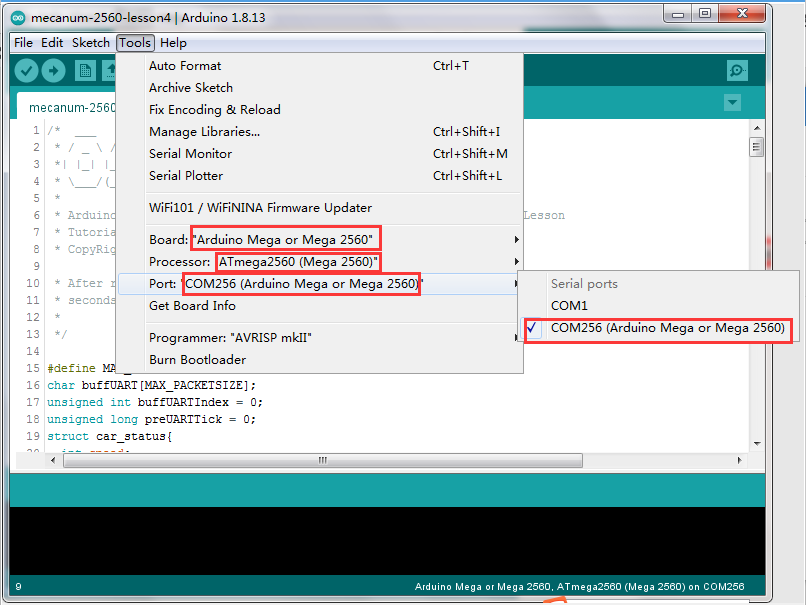
ステップ3: mega2560ボードをUSBケーブルでPCに接続し、Arduino IDEを開く->ファイルをクリックする->開くをクリックする->レッスンフォルダーでコード「lesson3.ino」を選択し、次のようにコードをarduinoにロードします。

ステップ4:プロジェクトに対応するボードとシリアルポートをマウスクリックで選択、スケッチをボードにアップロードします。
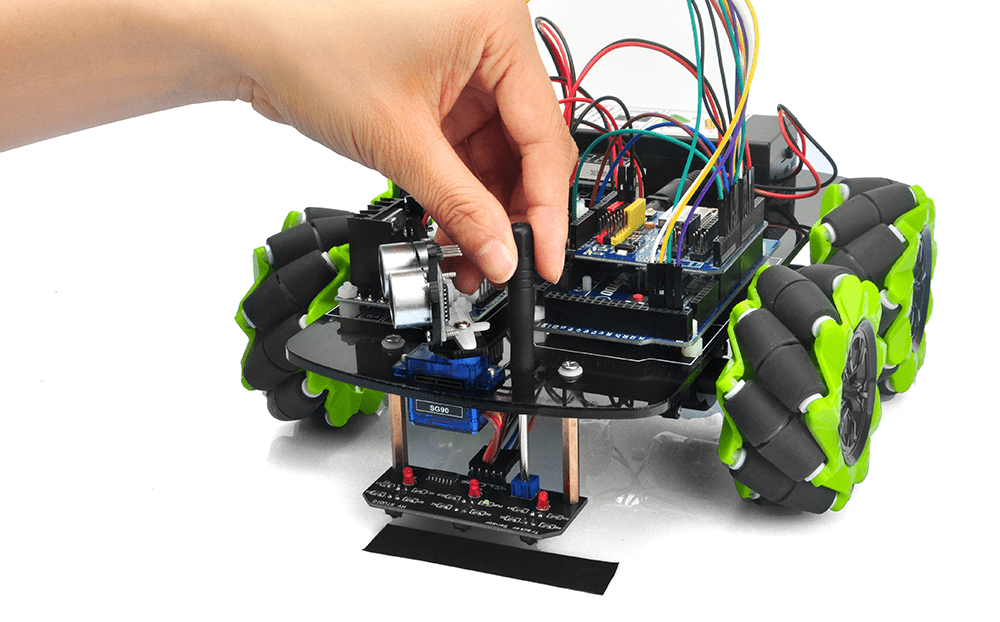
ステップ5:トラッキングセンサーモジュールの感度を調整します。車の電源を入れて保持し、最高の感度状態になるまで十字ドライバーでトラッキングセンサーのポテンショメーターを調整します:センサーが白い地面の上にあるときにLEDライトが点灯し、センサーが点灯すると信号LEDが消灯することを示します黒いトラックの上にあります。

白い地面に黒いラインを引き(黒いラインの幅は20mmから30mmでなければなりません)準備をいたします。 ラインの曲がりが鋭角すぎると車は制御しきれずにラインから外れます。
車の電源を入れ、トラッキングセンサーモジュールの中央を黒いトラックの上に向けると、車両は自動的に黒いトラックに沿って走行を始めます。











