



| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
日本 |
 |
 |
 |
 |
 |
 |
 |

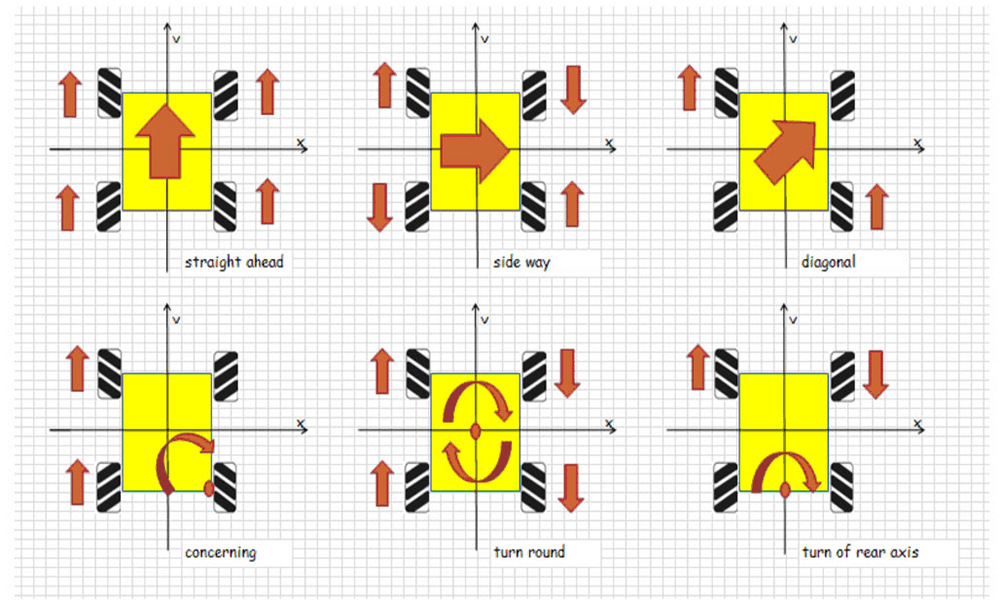
メカナムオムニホイールは非常に強力なホイール技術であり、ロボットカーが全方向の動き(左右への平行移動)を可能にします。
このプロジェクトでは、Arduinoを使用してOsoyoo Brand Mecanumホイールロボット車を制御し、基本的な動作を行う方法を示します。レッスン1のインストールは、基本的な機械構造と回路接続を提供するため、他の4つのレッスンの開始点です。

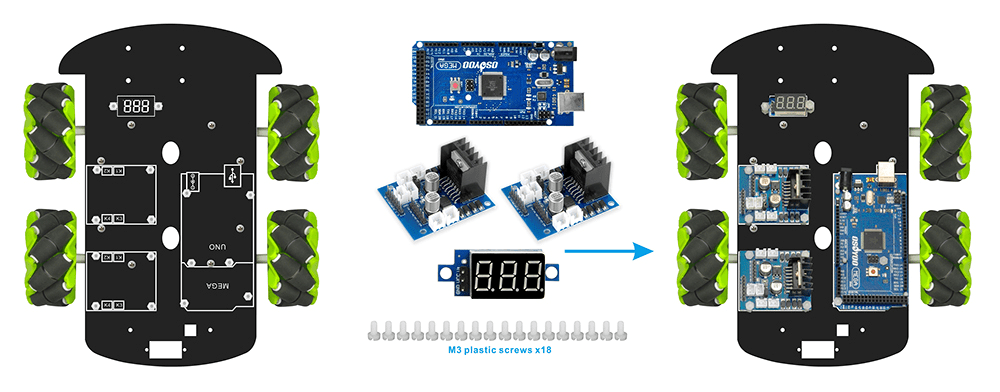
OSOYOO Mecanumホイールロボットカーシャーシx 1(2xleft-wheels / 2xright-wheelsおよびMotor x 4)
Arduino UNO / Mega2560と完全互換のOSOYOO Mega2560ボードx 1
OSOYOO V1.0 Wifiシールドx 1
OSOYOOモデルXモータードライバーx 2
OSOYOOバッテリーボックスx 1
モデルXからモデルXへの接続用白色ケーブル(2ピンXH.25メスからメス)x 1
18650バッテリー(3.7V)x 2

メカナムホイールは、車体を任意の方向に動かす為にするホイールの1つの機構です。円周に一連のローラーを設けたホイールです、これらのローラーはそれぞれ、ホイールの回転方向に対して45°、ホイールの回転軸に平行なローラーの中心を通る線に対して45°の回転軸を持っています。
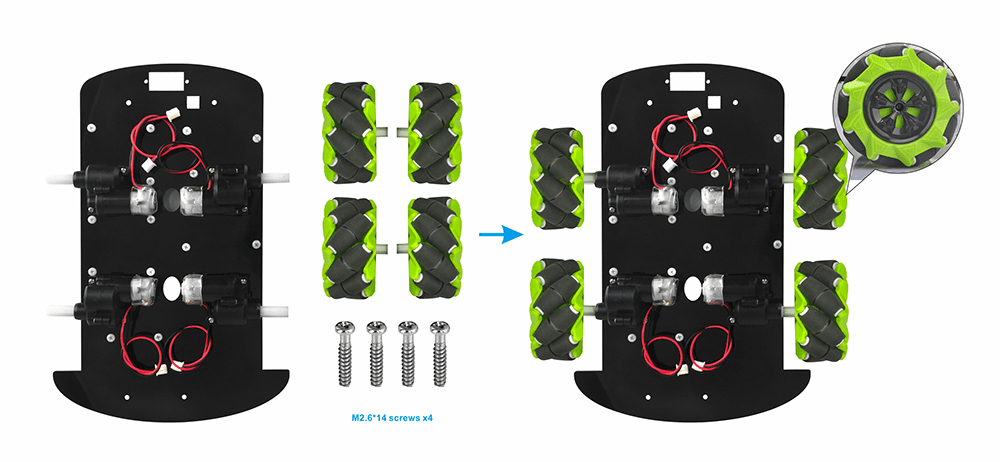
Mecunumホイールには、AおよびB Mecunumホイールの2種類があります、この二つのローラー取付け方向は回転軸に対して向きが異なります、以下に示すように、Mecunumホイールの場合、ローラーは右斜下方向に取り付けられ、それに対してBホイール用のローラーは左斜下方向に取り付けられています。
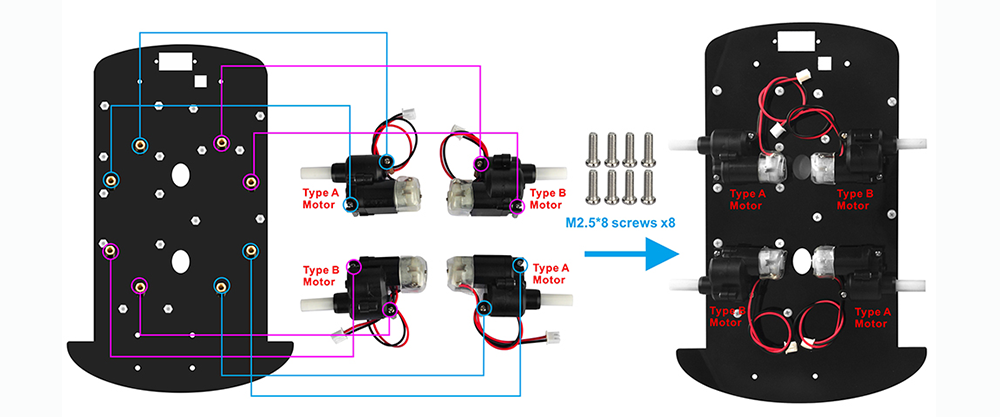
ホイール取付けの際にはローラー方向に注意が必要です。 下記に示すローラー方向にそれぞれを取り付ける必要があります。各ホイールの上部ローラー方向が車体の中心方向を指す向きに取り付けます。 本コードによるすべての走行はこのホイール取り付け状態で作成されていますので、ホイール取り付け方向を御注意してください。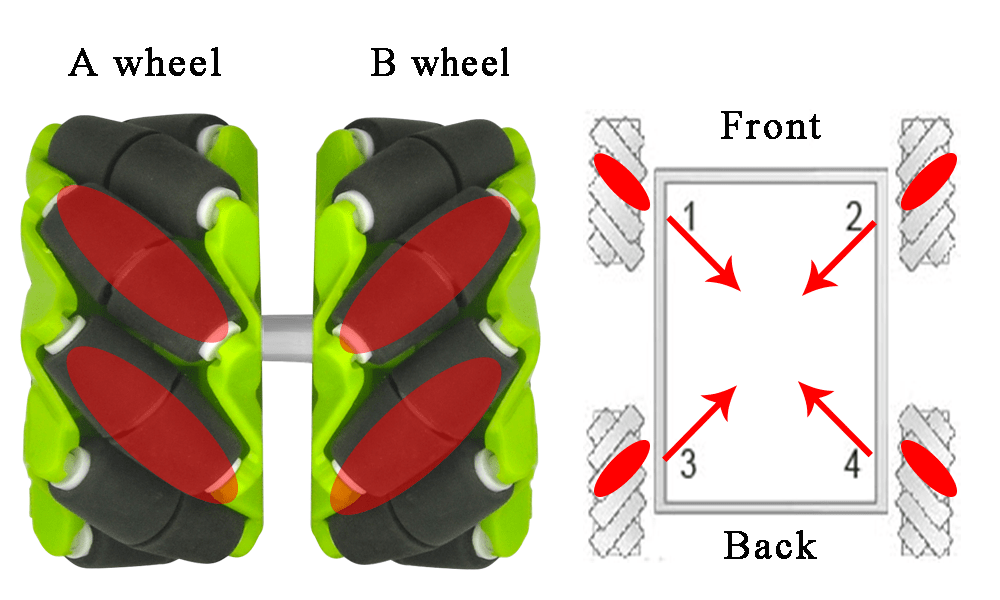
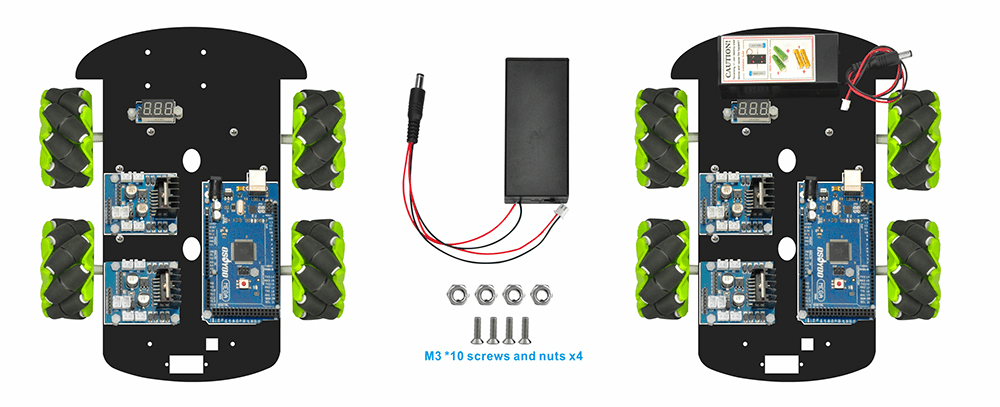
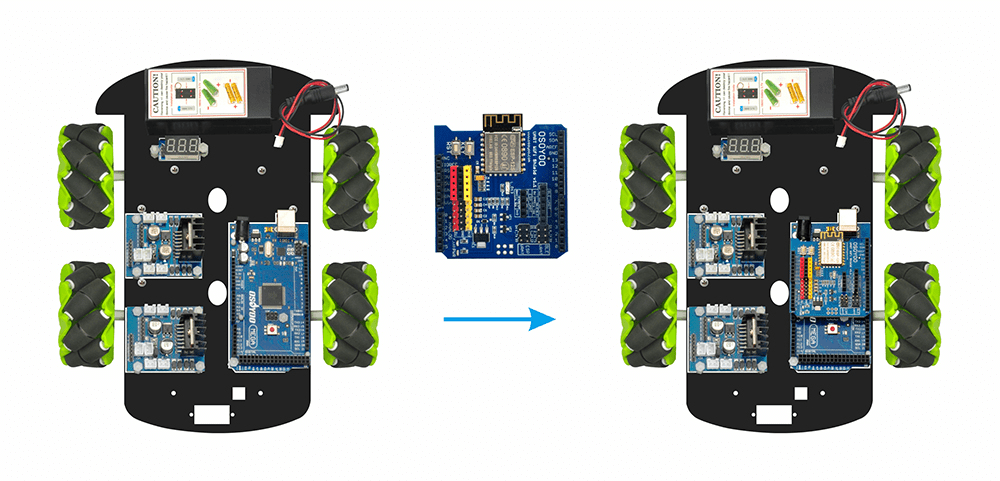
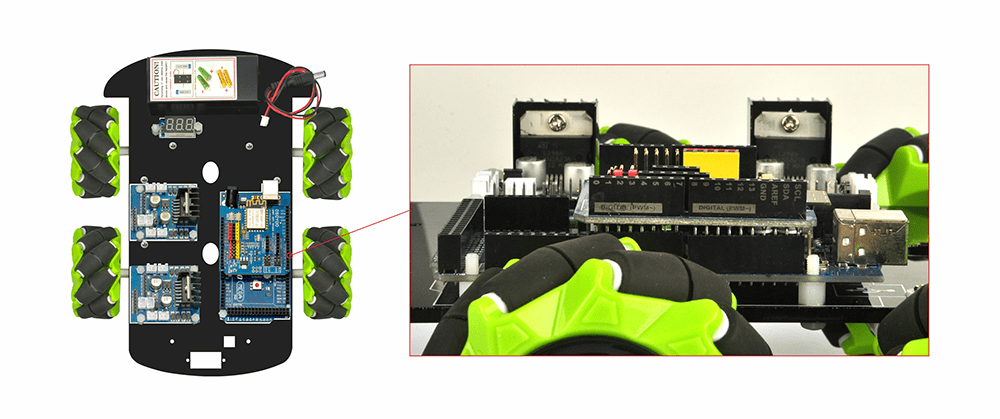
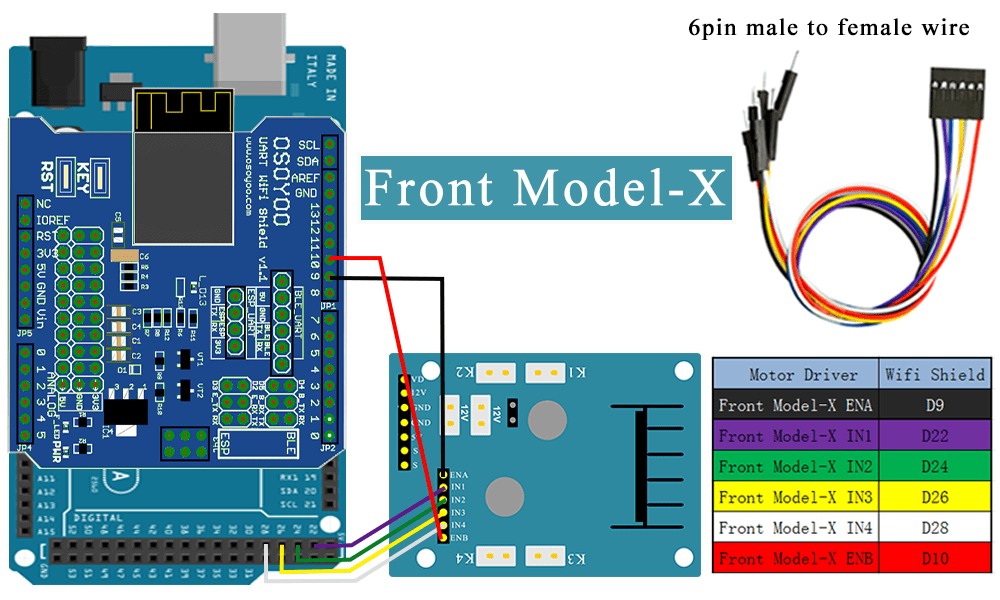
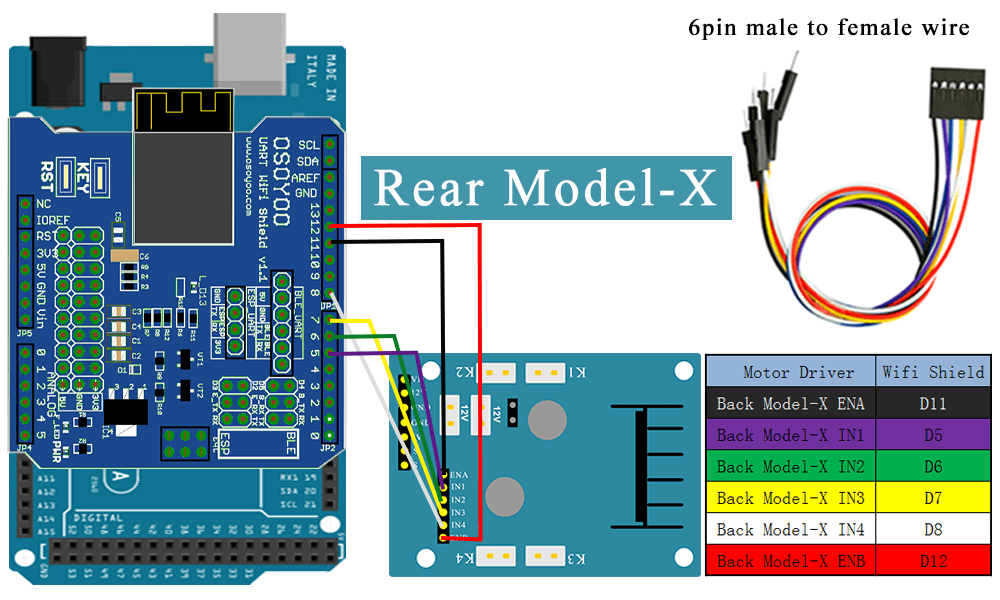
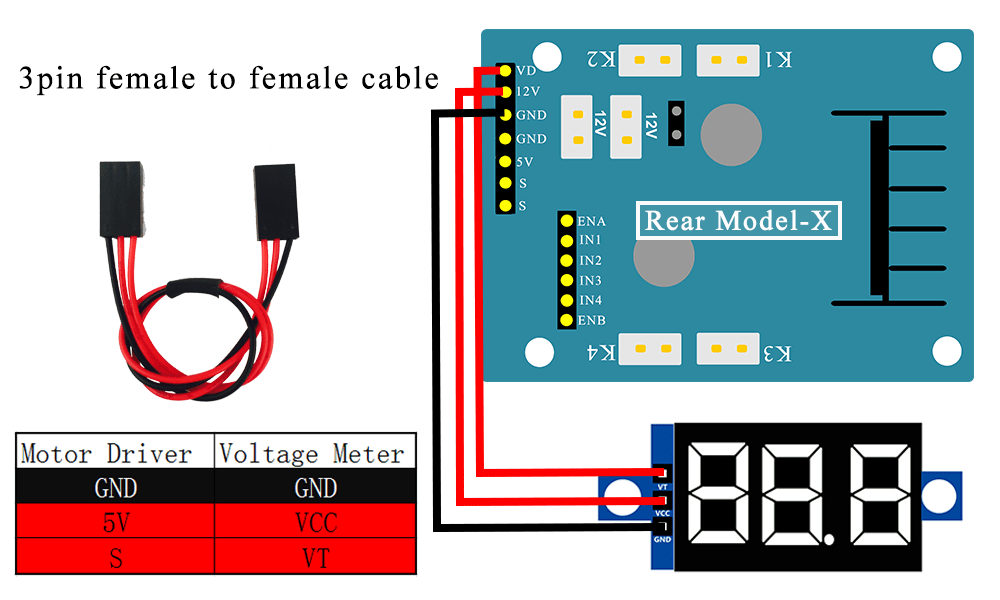
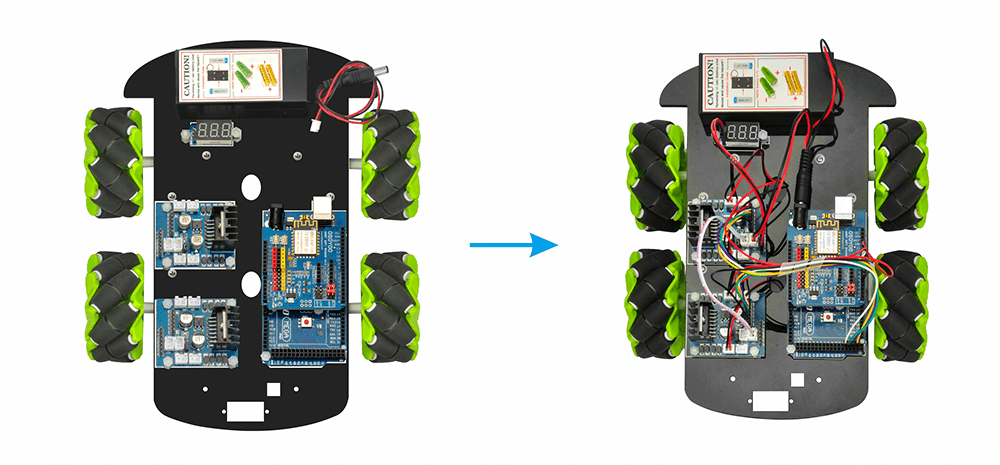
回路接続
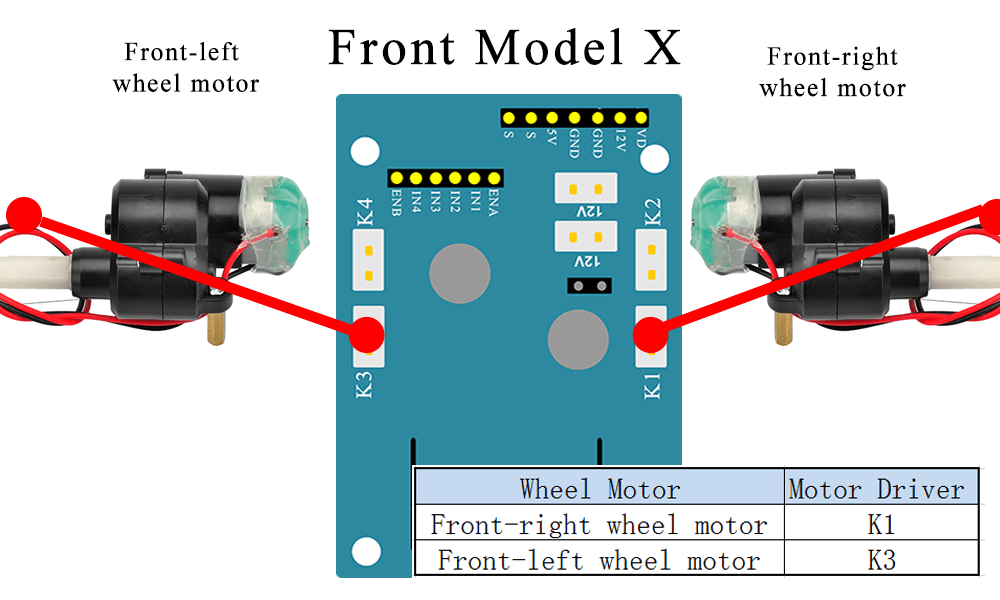
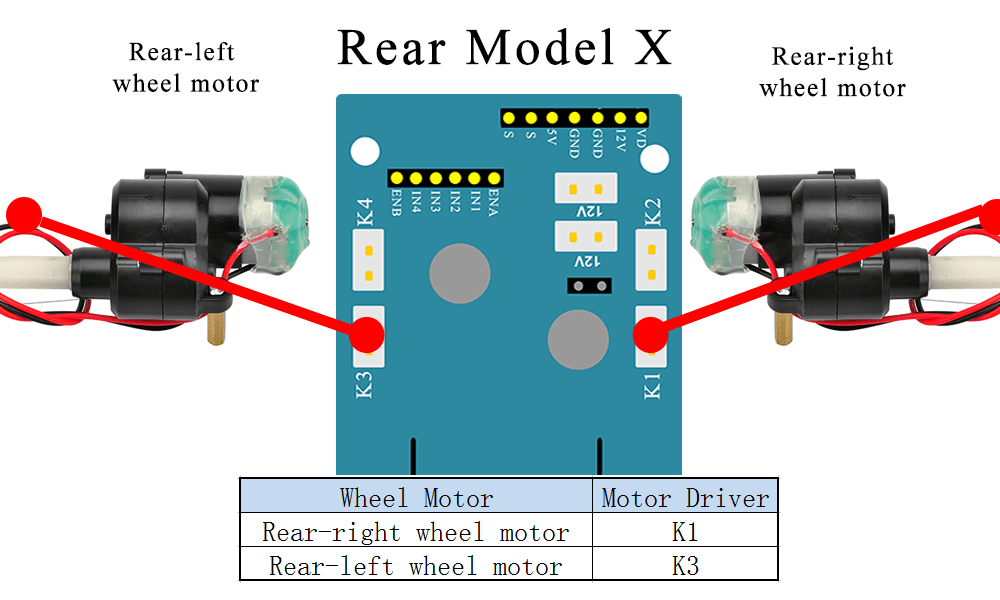
モーター線の接続:

ステップ1:最新のArduino IDEをインストールします(バージョン1.1.16以降のArduino IDEを使用している場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードし、ソフトウェアをインストールします。
ステップ2:ダウンロードしhttps://osoyoo.com/driver/mecanum/mecanum-2560-lesson1.zipは、ダウンロードしたzipファイルを解凍しlesson1.zip、あなたはlesson2という名前のフォルダが表示されます。
ステップ3: mega2560ボードをUSBケーブルでPCに接続し、Arduino IDEを開く->ファイルをクリックする->開くをクリックする-> lesson1フォルダーでコード「lesson1.ino」を選択し、コードをarduinoにロードする

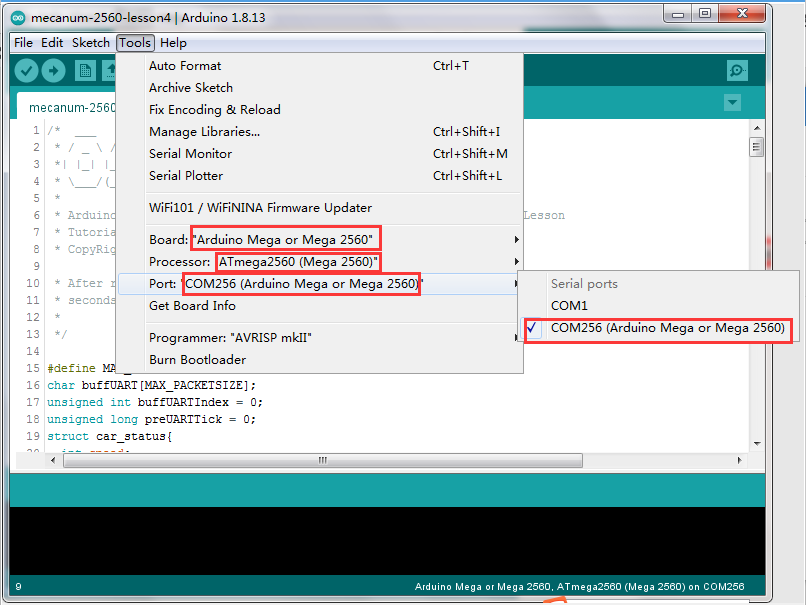
ステップ4:プロジェクトに対応するボードとシリアルポートをマウスでクリック選択、スケッチをボードにアップロードします。

レッスン1のコードを実行した後、車は前方、後方、左折、右折、左シフト、右シフトに移動します。このシーケンスに従って車が動かない場合は、配線接続を確認する必要があります。











