



| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
日本 |
 |
 |
 |
 |
 |
 |
 |

本レッスンでは、モバイルを使用してロボットカーを制御し、模擬運転を行います。 アプリで仮想ステアリングホイールとギアを使用して、実際の車の応答します。
本レッスンでは、オムニメカナムiホイールを使用して、ロボット車が全方向に移動できるようにします(左右に平行移動)。

OSOYOO Mecanum Wheels Robotic Car Chassis x 1(2x left-wheels / 2x right-wheels and 4x motor)
Arduino
OSOYOO V1.0 WIFI Shield と完全に互換性のあるOSOYOO Mega2560ボードx 1
OSOYOO Model Xモータードライバーx 2
OSOYOO HC02 bluetooth module
OSOYOO Batteryボックスx 1
18650電池ボックス(3.7V)x 2

このレッスンを続ける前に、lesson 1 (assembling the car) を完了する必要があります。何も変更する必要はありません。ハードウェアのワイヤ接続をそのままにしてください。
ステップ1:B_TXとB_RXをD19とD18に接続します。
(注:10個のジャンパーワイヤーバンドルから2個のオスからメスへのジャンパーワイヤーを分割する必要があります。バンドルの色はすべて問題ありません。残りの8個のワイヤーは、潜在的な破損または損傷したワイヤーのスペア部品です。 ) 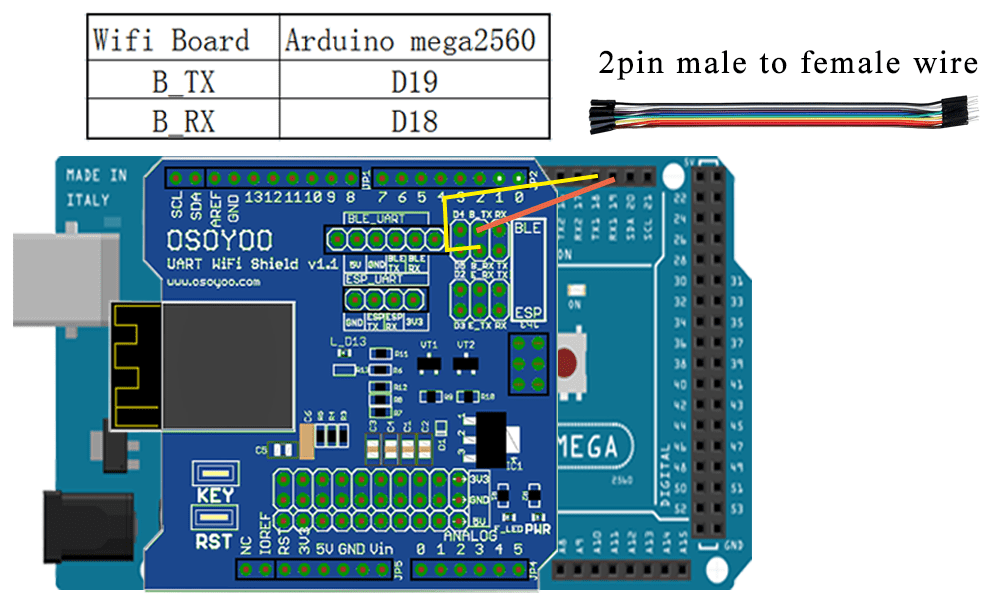
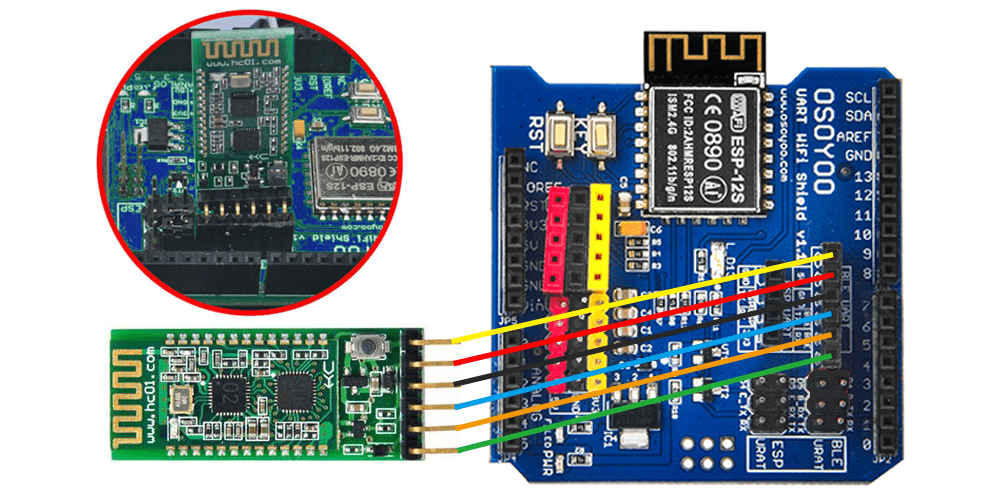
STEP2: OSOYOO WifiボードのBluetooth 6ピンスロットにBluetoothモジュールを挿入する必要があります

ステップ1:最新のArduino IDEをインストールします(バージョン1.1.16以降のArduino IDEを使用している場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=enからArduino IDEをダウンロードし、ソフトウェアをインストールします。
ステップ2:ダウンロードしhttps://osoyoo.com/driver/mecanum/mecanum-2560-lesson4.zipは、ダウンロードしたzipファイルを解凍しlesson4.zip、あなたはlesson4という名前のフォルダが表示されます。
ステップ3: USBケーブルでmega2560ボードをPCに接続し、Arduino IDEを開く->ファイルをクリックする->開くをクリックする-> lesson4フォルダーでコード「lesson4.ino」を選択し、コードをarduinoにロードする

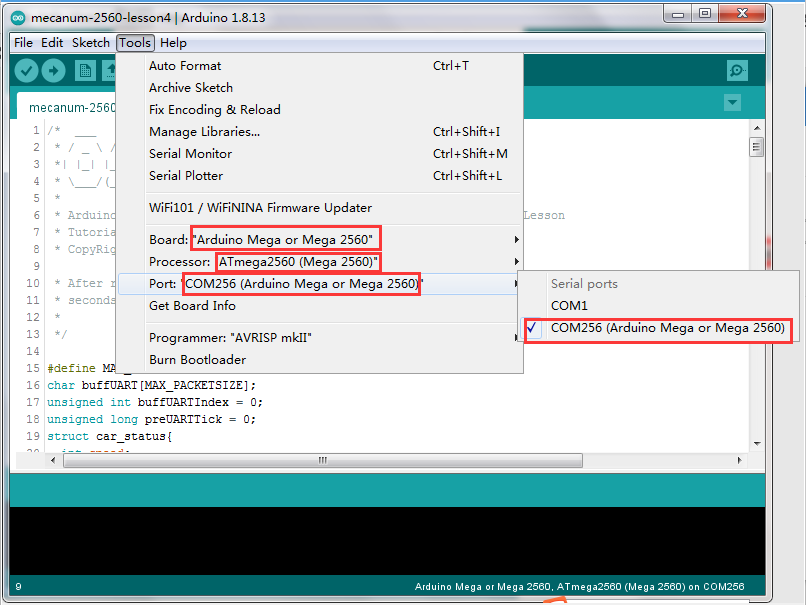
ステップ4:プロジェクトに対応するボードとシリアルポートをマウスクリックで選択、スケッチをボードにアップロードします。
モバイルアプリ:
Google PlayまたはApple APPストアにアクセスして、アプリ名「OSOYOO imitation driving」を検索し、次のようにアプリをダウンロードしてスマートフォンにインストールします。
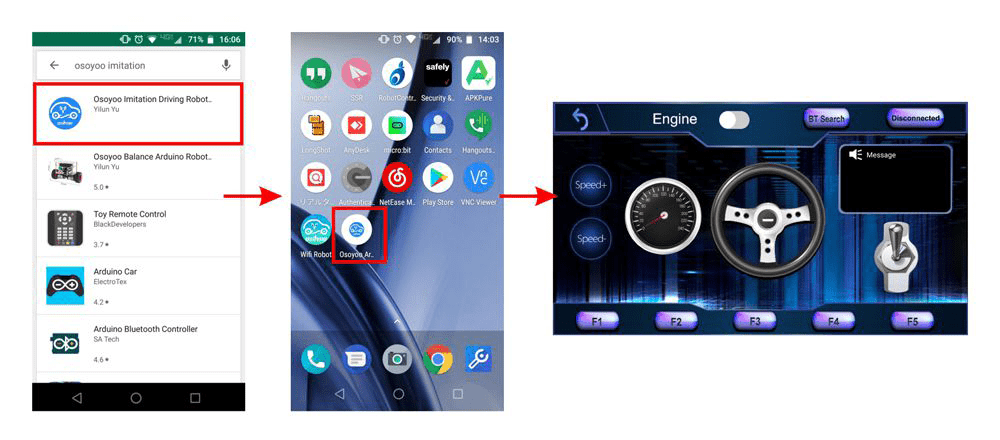

ロボットの電源を入れ、携帯電話アプリを開きます。
1)Bluetoothモジュールを携帯電話とペアリングしていない場合は、アプリを開く前に最初にBluetoothモジュールをペアリングしてください。携帯電話の[設定]-> [Bluetooth]で、HC02というBluetoothデバイスを探し、パスワード1234とペアリングします。
2)Bluetooth HC02デバイスをペアリングした後、アプリを開きます。Androidアプリを使用している場合、BT検索ボタンをクリックしてアプリをHC02デバイスに接続します。iOSアプリの場合は、[ 接続 ]をクリックするだけです。
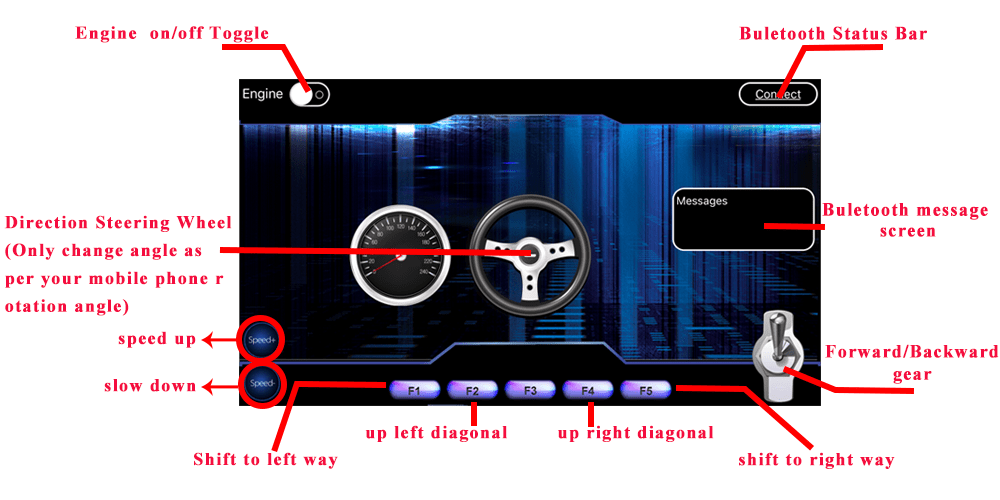
3)エンジンスイッチをクリックして車を起動/停止します
4)スピード+/-ボタンをクリックして、スピードを加速または減速します
5)携帯電話を回転させて方向を変更します(電話を回している間、ステアリングホイールが回転します)。
6)ギアボタンをクリックして、ギアを前進または後退方向に変更します。
7)F1を押して左方向にシフト、F5を右方向にシフト、F3を左上斜め方向、F4を右斜め上方向に押します。











