Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
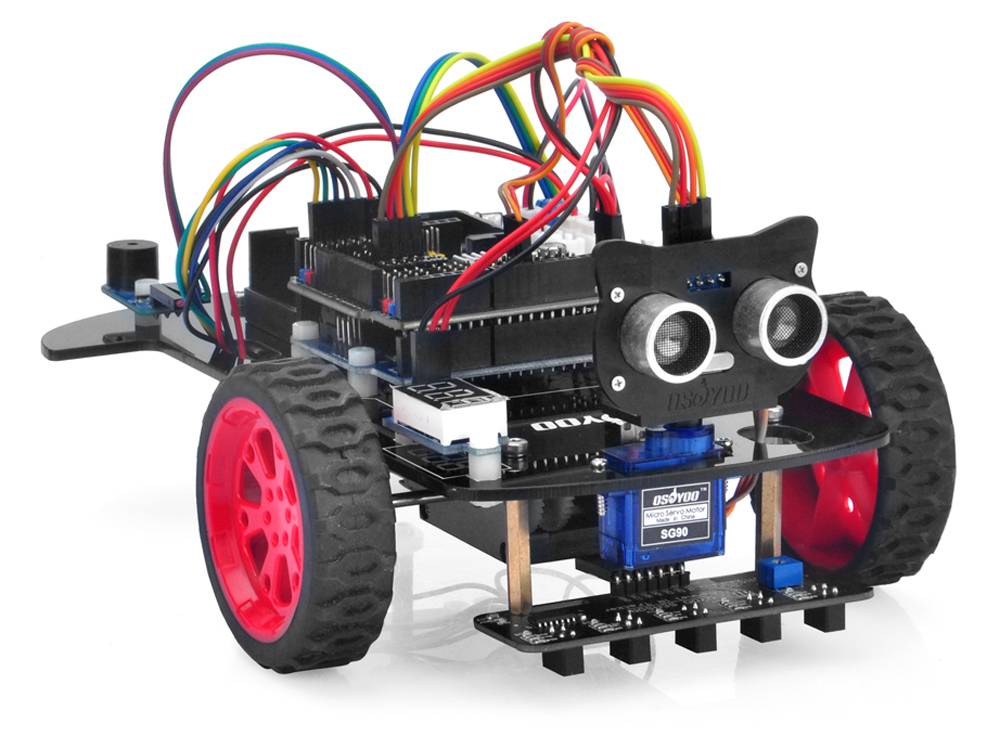
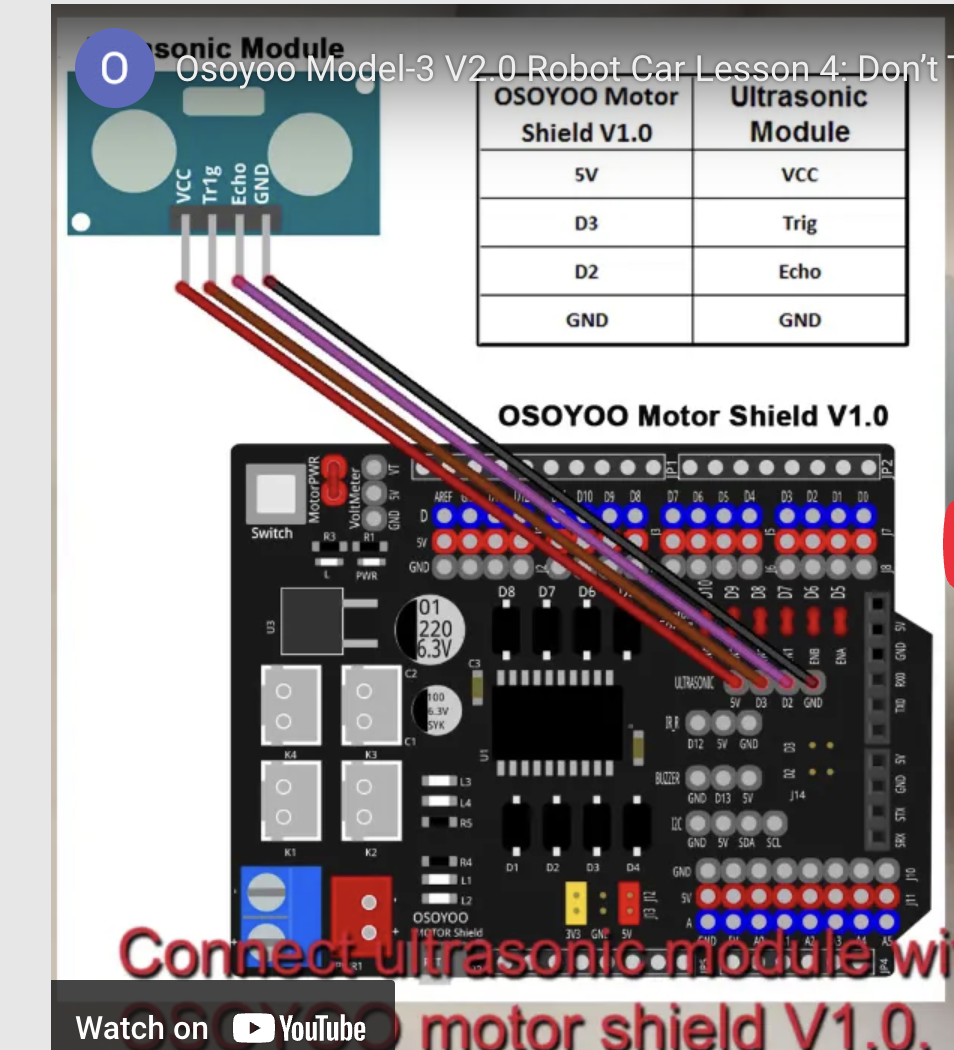
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.

















Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
bonjour je ne comprend pas la voiture tourne sa tête mais au lieu d’avancer, elle recule de plus elle ne répond plus a la télécomande Merci
If you meet this problem in the lesson Obstacle avoidance, please check the wires on Ultrosonic Sensor or change another Ultrosonic Sensor
Hi, when i did this lesson the car kept on moving back without doing anything and the car when i plug it in my computer it trys to move back
Hi, the robot is just seeing obstacles everywhere? So it scans around, then turns 90 degrees eternally – what’s wrong here?
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
Don’t you guys have a mblock graphic programming for this one like the one for the Model T. Would be very didactic for the little kids.
Thanks
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.