| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

-
- アルドゥイーノUNOボードx2
- OSOYOO ESP8266Wifiシールドx2
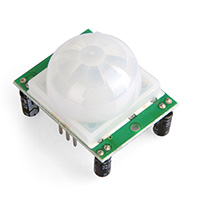
- HC-SR501PIRモーションセンサーx1
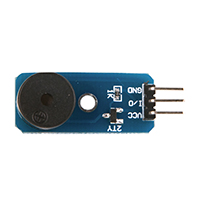
- ブザーセンサーモジュール×1
- USBケーブル×2
- ジャンパーケーブルこのレッスンは、少し複雑でエキサイティングな最後のプロジェクトです。前のレッスンでは、ブラウザまたは携帯電話のみを使用して、人間とアルドゥイーノの会話を行います。このレッスンでは、あるアルドゥイーノがインターネットUDPプロトコルを介して別のアルドゥイーノと通信します。アルドゥイーノIoTラーニングキットを2セット購入する必要があります。最初のOSOYOOUnoボード(UNO Aと呼びます)を使用してPIRモーションセンサーを接続し、別のUNOボード(UNO B)を使用してブザーを接続します。侵入者がUNOAのPIRモーションセンサーによって検出されると、アラーム信号がUNOAからUNOBに送信され、ブザーが鳴ります。

- アルドゥイーノUNOボードx2
- OSOYOO ESP8266Wifiシールドx2
- HC-SR501PIRモーションセンサーx1
- ブザーセンサーモジュール×1
- USBケーブル×2
- ジャンパーケーブル

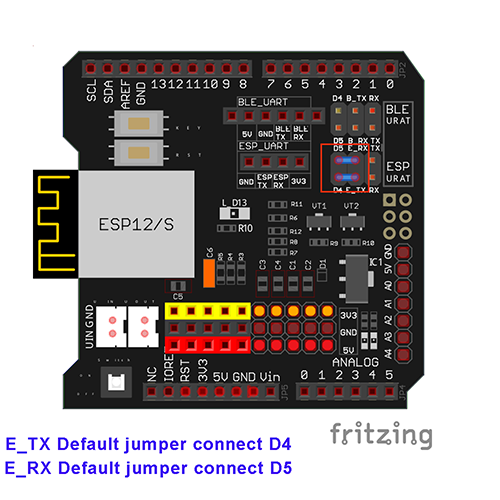
まず、ESP8266Wi-FiシールドをUNOボードに装着してください
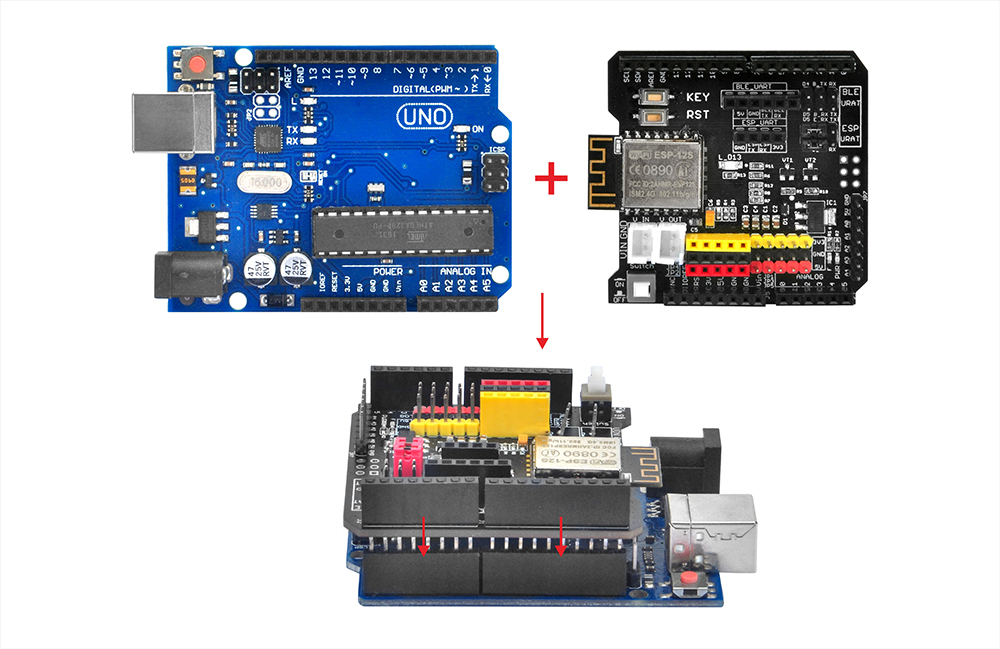
ジャンパーキャップがE_TXをD4に、E_RXをD5に接続していることを確認してください。
 Hardware A)
Hardware A)- アルドゥイーノUNOボード+ ESP8266 WIFIシールドはPIRモーションセンサーに
接続しますモーションセンサー中央OUTピンは次のグラフのようにD3に接続します:
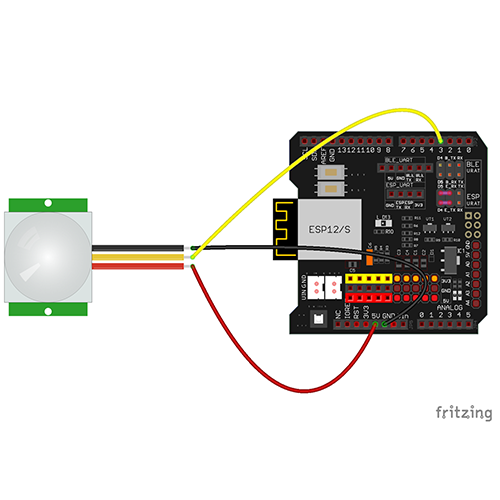
| UNO Board |
PIR |
| D3 |
OUT |
| GND |
GND |
| 5V |
VCC |
Hardware B)
- アルドゥイーノ UNO B + ESP8266 WIFIシールドは
ブザーに接続しますブザーI / Oピンは次の図のようにD9に接続します:
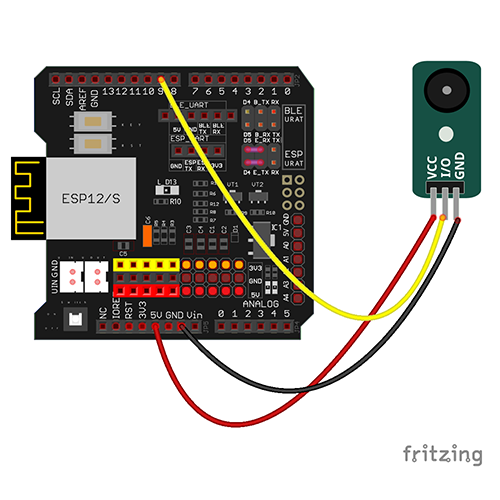
| UNO Board |
Buzzer |
| D9 |
I/O |
| GND |
GND |
| 5V |
VCC |

ステップA)最新のアルドゥイーノ IDEをインストールします(1.1.16以降のバージョンのアルドゥイーノ IDEを使用している場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=enからアルドゥイーノIDEをダウンロードし、ソフトウェアをインストールします。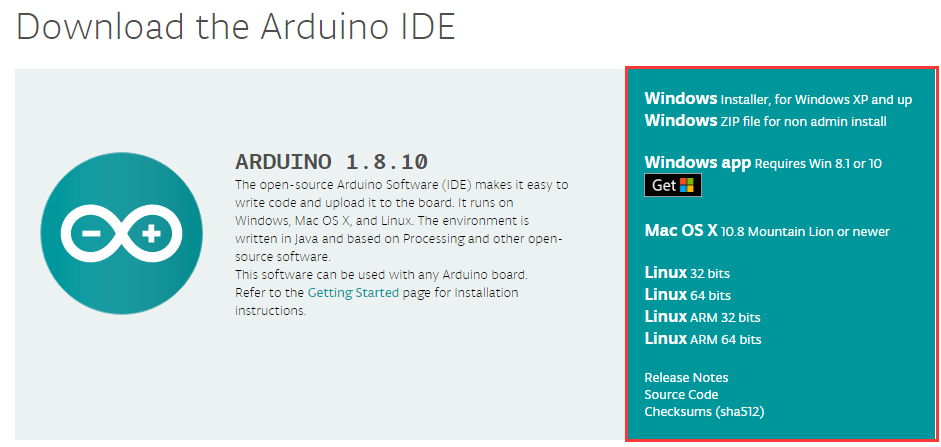
ステップB) USBケーブルを介してアルドゥイーノUNOボードをコンピューターに接続します。
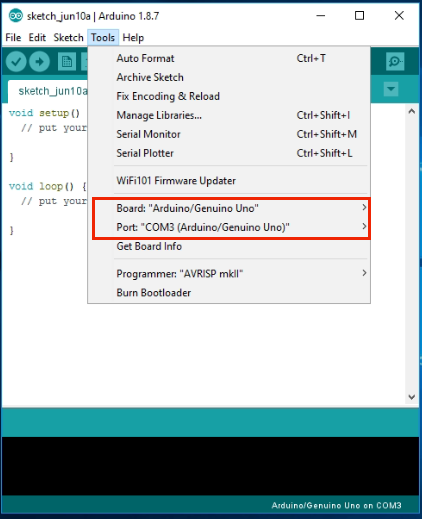
ステップC) アルドゥイーノ IDEを開き、プロジェクトに対応するボードタイプとポートタイプを選択します。
- ボード:「アルドゥイーノ / GenuinoUNO」
- ポート:UNOボード用に独自のシリアルポートを選択します
ステップD)
ケッチファイルをhttps://osoyoo.com/driver/Esp8266_Arduino_IOT/lesson12/esp8266-lesson12.zipからダウンロードします。
上記のファイルを解凍すると、「esp8266-lesson12」フォルダーが表示されます。このフォルダーに入ると、次のようになります。 2つのサブフォルダー(ブザーとモーションセンサー)を参照してください。
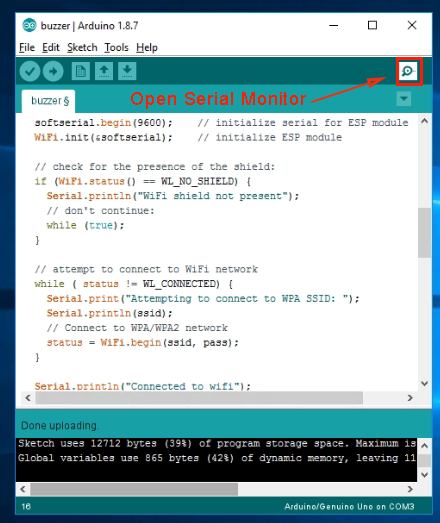
buzzerフォルダーに入り、buzzer.inoファイルをダブルクリックして、次の行を見つけます。
char ssid[] = "******"; // your network SSID (name)
char pass[] = "******"; // your network password
正しいSSIDとパスワードに置き換えてください。そうしないと、プロジェクトがインターネットに接続ないとできません。
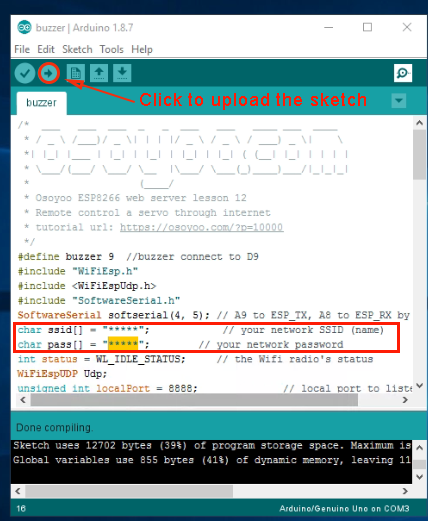
ステップE) 上記の行変更した後、スケッチをアルドゥイーノIDEにロードします。

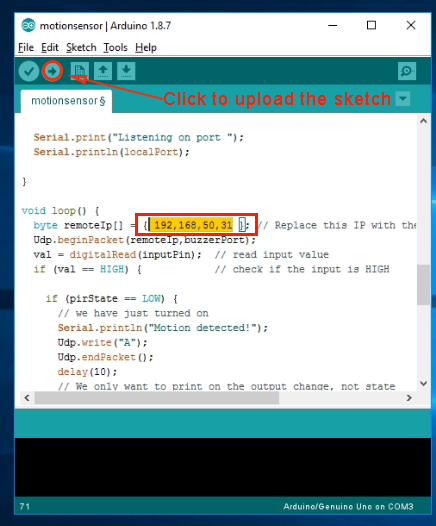
バイトremoteIp [] = {192,168,50,31}; //…次に、motionsensor.inoファイルをコンパイルしてアルドゥイーノにアップロードできます。
テスト結果:
ESP8266シールドとアルドゥイーノボードの両方の電源をオンにします。モーションセンサーの前で手を動かすと、リモートブザーが鳴ります。
-
- 部品詳細
-












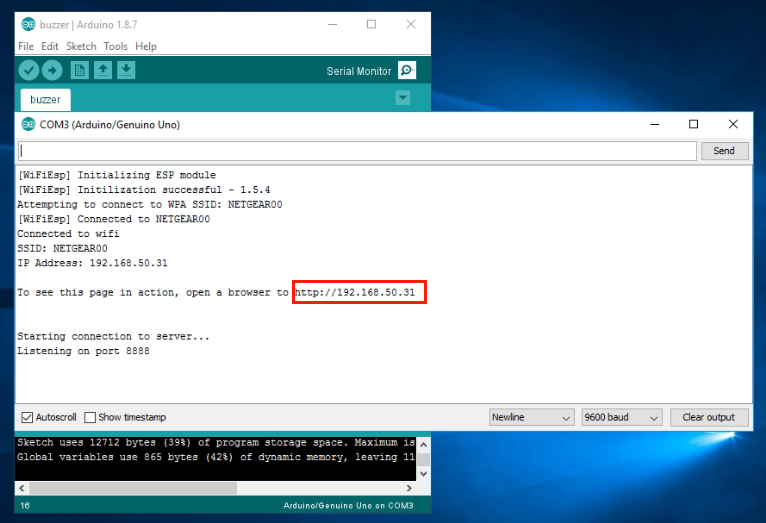 上記の例では、192.168.50.31はルーターによってブザーアルドゥイーノに割り当てられたIPアドレスです。このIPアドレスをに書き留める必要があります。紙。このIPアドレスを使用して、motionsensor.inoファイルのスケッチコードを変更する必要があります。このアルドゥイーノをPCから取り外し、他のUSBアダプターを使用してこのブザーアルドゥイーノに電力を供給することができま
上記の例では、192.168.50.31はルーターによってブザーアルドゥイーノに割り当てられたIPアドレスです。このIPアドレスをに書き留める必要があります。紙。このIPアドレスを使用して、motionsensor.inoファイルのスケッチコードを変更する必要があります。このアルドゥイーノをPCから取り外し、他のUSBアダプターを使用してこのブザーアルドゥイーノに電力を供給することができま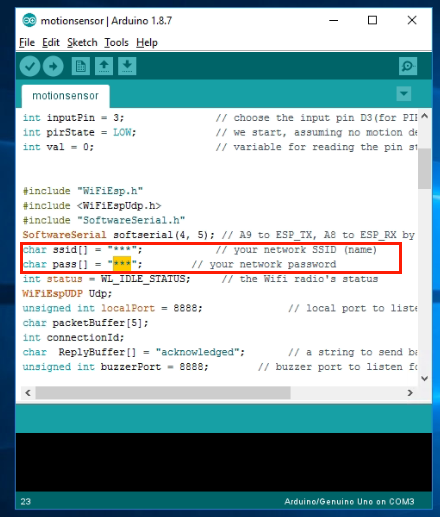 ステップ5) Then search following line:
ステップ5) Then search following line: