VIDEO ユーザーマニュアルは次の場所からダウンロードできます。
注:ARDUINO用のすべてのOSOYOO製品は、ARDUINOと完全に互換性のあるサードパーティボードです。
認定オンライン小売業者
アメリカから購入
英国から購入
DEから購入
IT部門から購入
フランスから購入
ESから購入
ここでご購入を!
目的 アルドゥイーノのためのOSOYOOスポーツカーの最初のレッスンへようこそ!
このレッスンでは、ロボットカーのフレームワークを取り付け、ステアリングサーボを調整して車を正面に向けます
今後のレッスンの実験はすべてレッスン1のフレームワークに基づいているため、このレッスンのインストールとサンプルコードを適切にテストすることが非常に重要です。
部品・装置
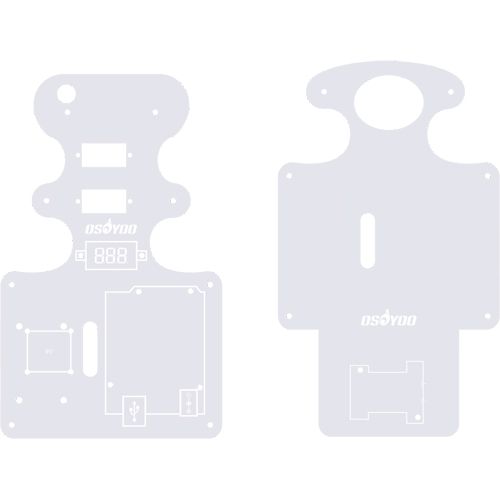
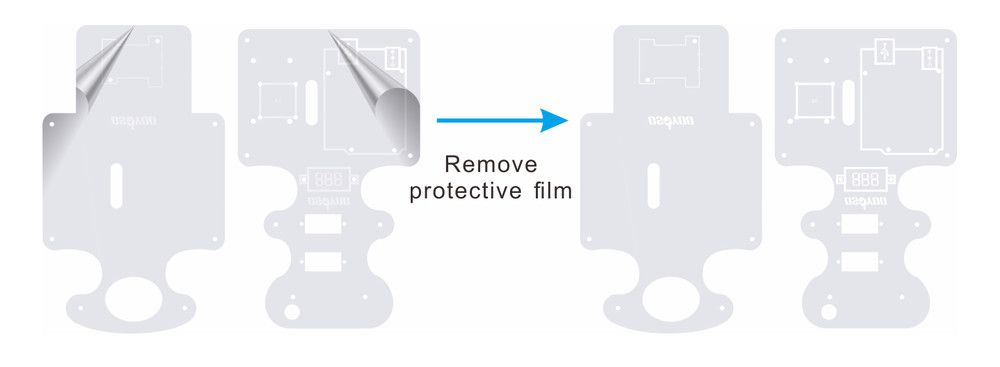
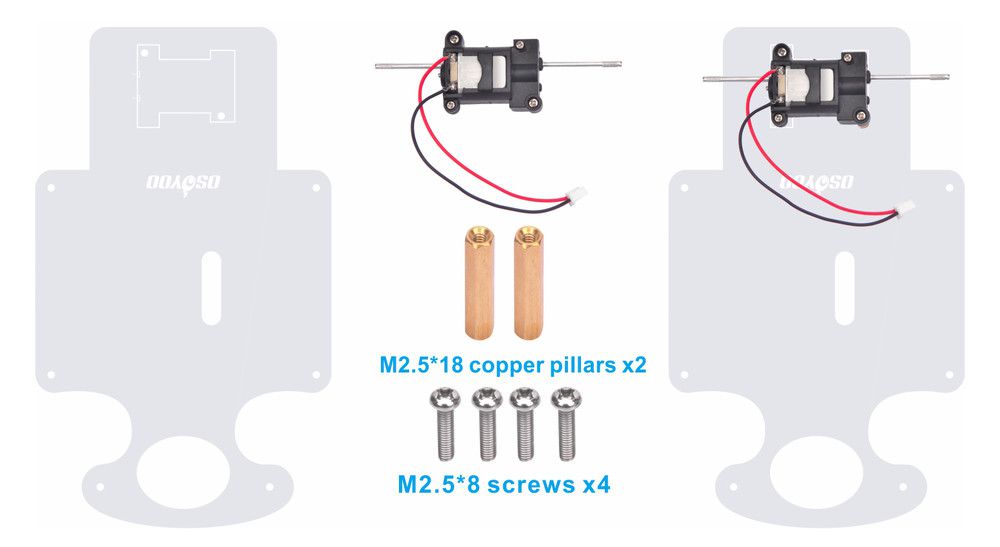
ハードウェアのインストール 1. シャーシから保護フィルムをはがします。
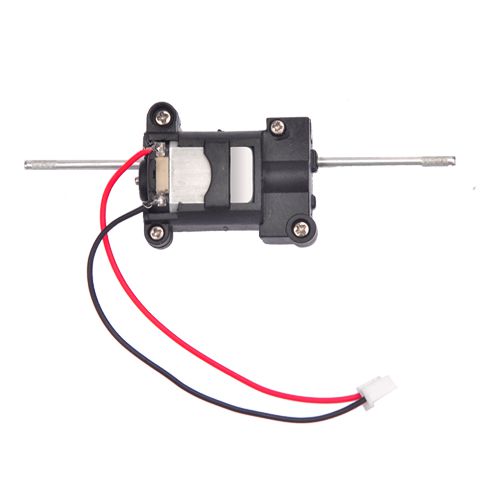
2.次のように、2本のM2.5 * 18銅柱と4本のM2.5 * 8ネジでモーターを下部シャーシに固定します。
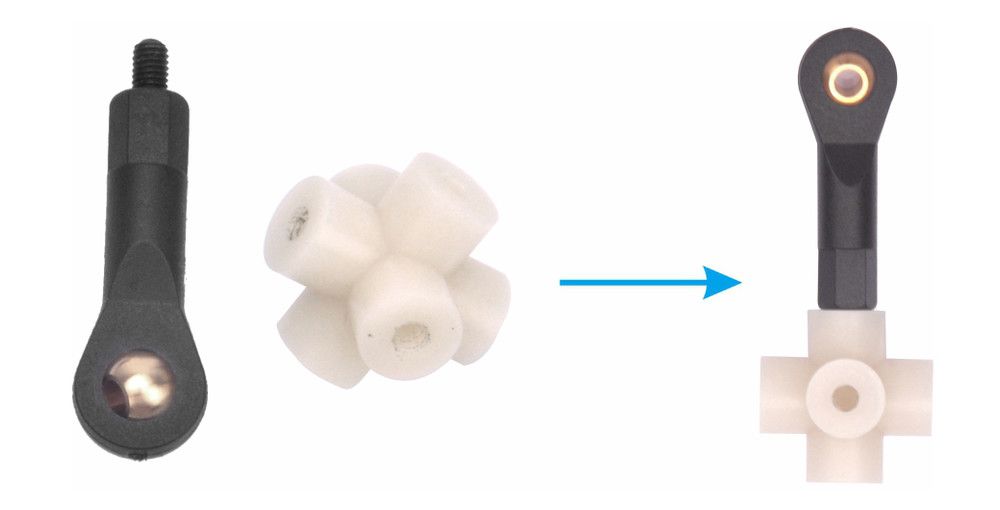
3.ステアリングカップをロッドエンドベアリングに次のように接続します(注意:片側から反対側に交差できる<>つの穴を使用してホイールを固定しますので、これらの<>つの穴に部品を取り付けないでください) 。
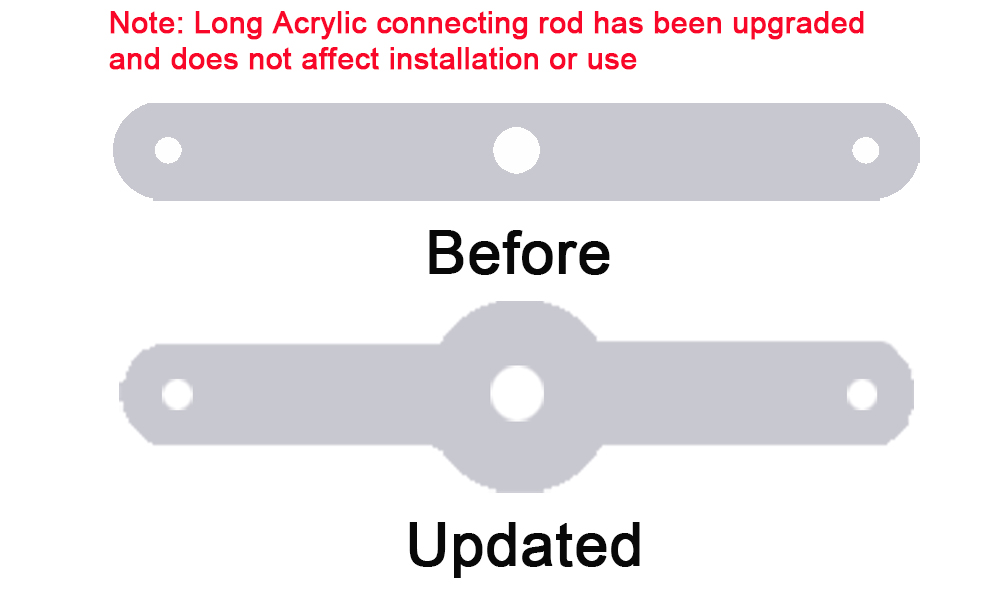
4.次のように、長いアクリルコネクティングロッドに2個のロッドエンドベアリングを取り付けます(注:ロングアクリルコネクティングロッドはアップグレードされており、取り付けや使用には影響しません ) 。
5.次のように、短いアクリルコネクティングロッドに黒いサーボホーン(オレンジ色のサーボモーターのパッケージから) を取り付けます。
6.次のように、M5 * 6金属リベット付きの長いアクリルコネクティングロッドに短いアクリルコネクティングロッドを取り付けます。
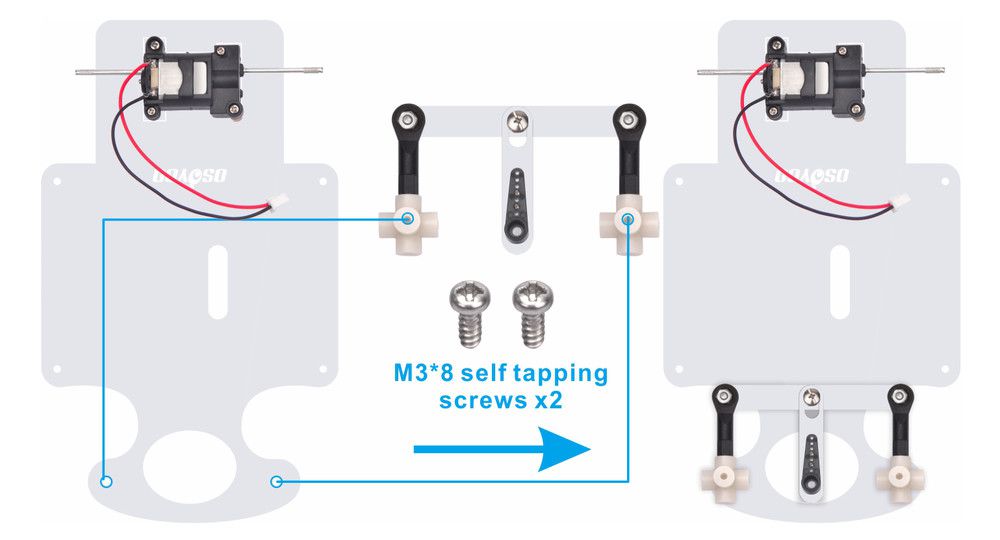
7.次のように、2個のステアリングカップを2個のM3 * 8セルフタッピングネジで下部シャーシに固定します。
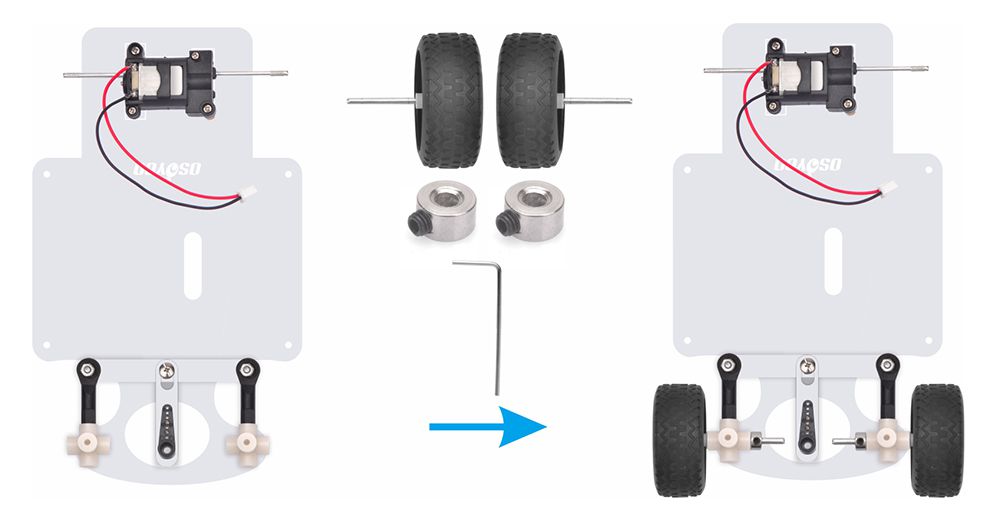
8.次のように金属棒に2個のホイールを取り付けます。
9. ステアリングカップを通して2個のホイールを交差させ、Lタイプレンチを使用して、次のように金属スリーブでこれらを固定します。
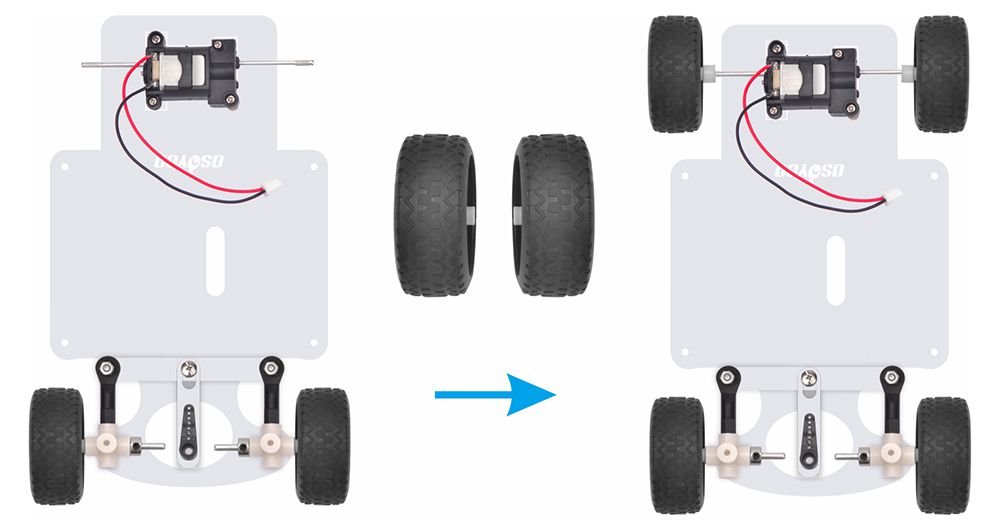
10.次のように、他の2個のホイールをモーターに取り付けます。
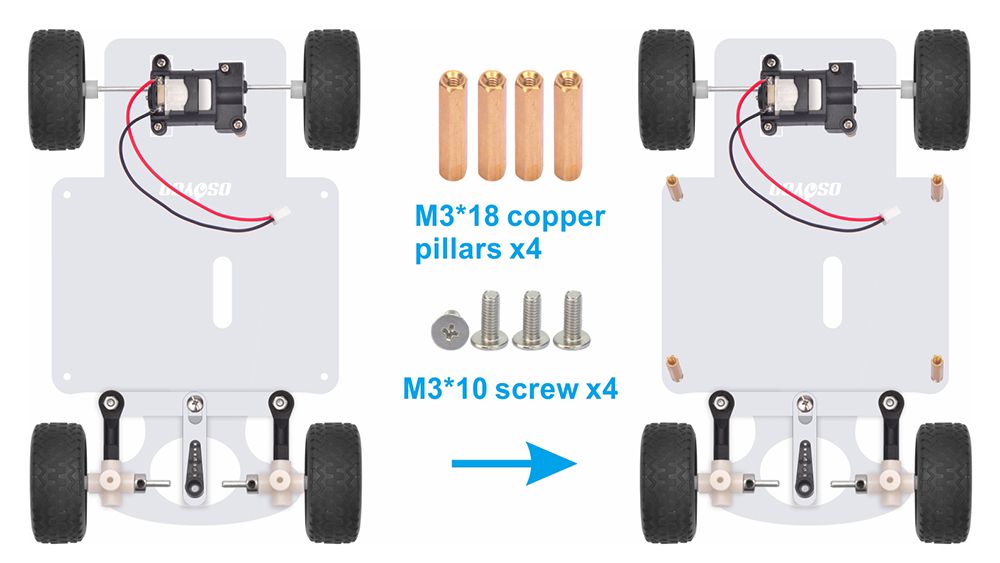
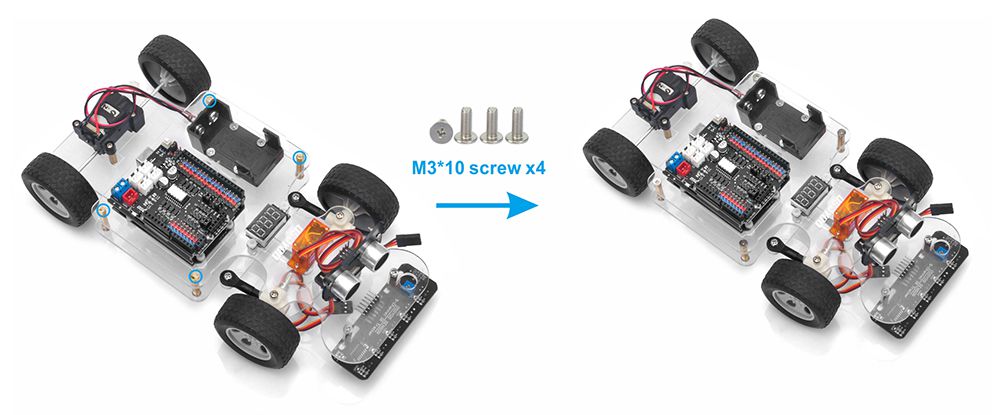
11.次のように、M3 * 18銅柱をM3 * 10ネジで下部車のシャーシに4本取り付けます。
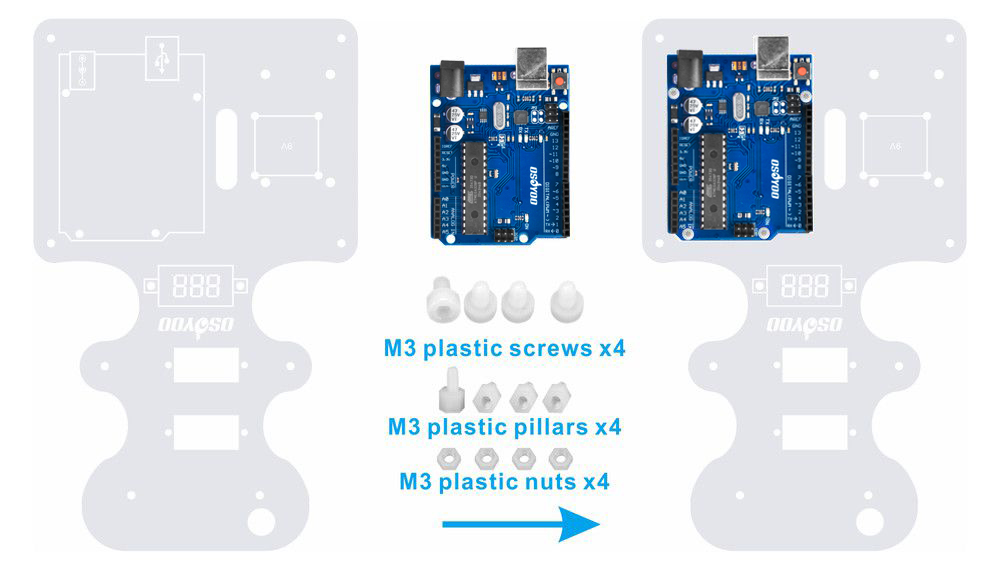
12.六角ドライバーを使用して、次のようにM3プラスチックネジ、ピラー、ナットを使用してOSOYOO UNOボードを上部車のシャーシに取り付けます。
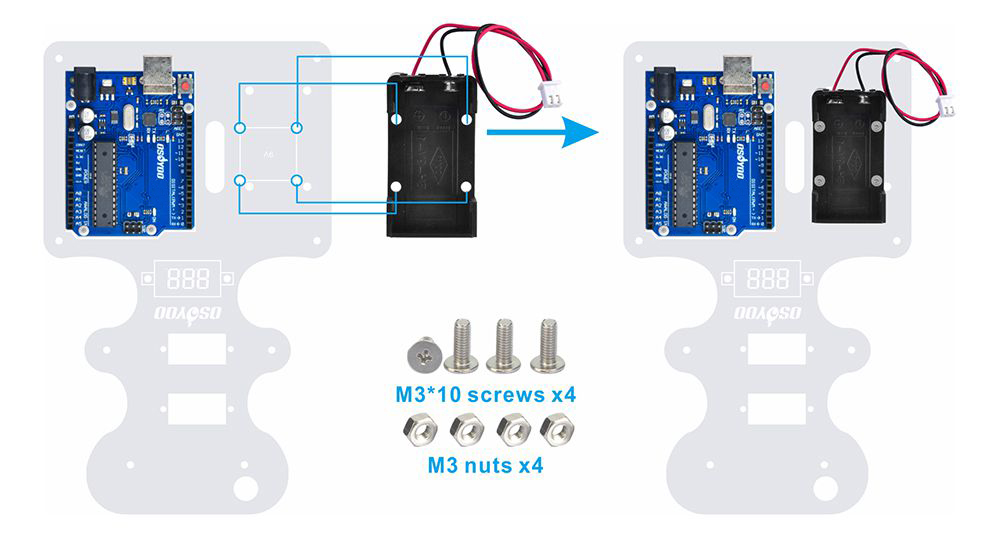
13. 次のように、M3プラスネジとナットを使用してシャーシに9Vバッテリーボックスを取り付けます。
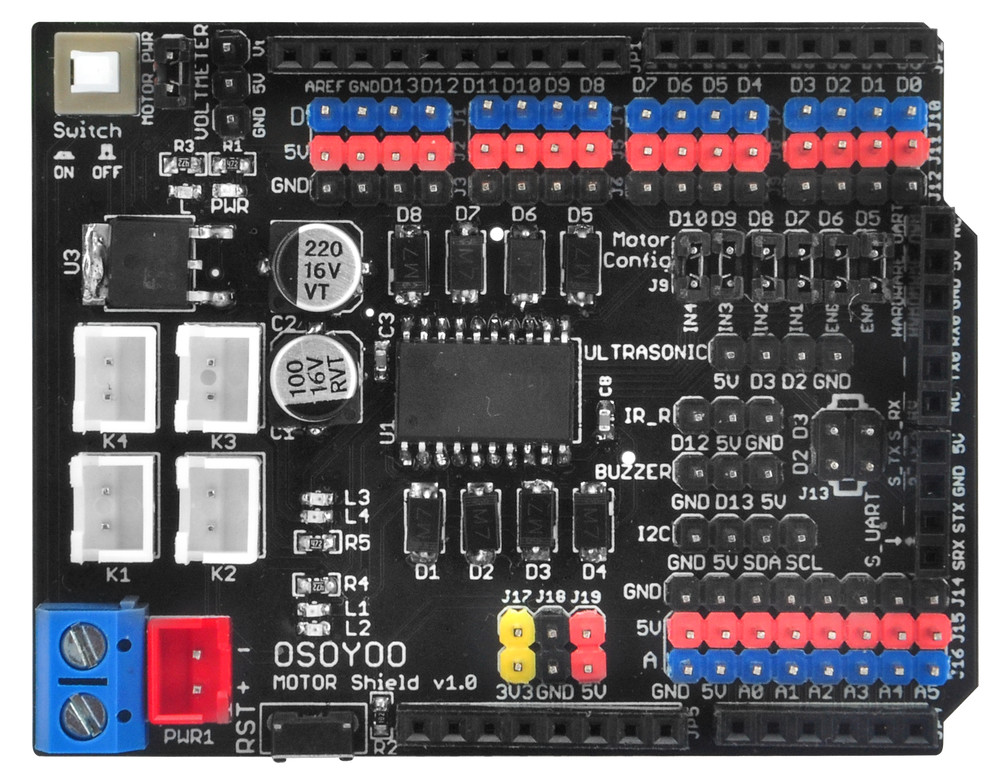
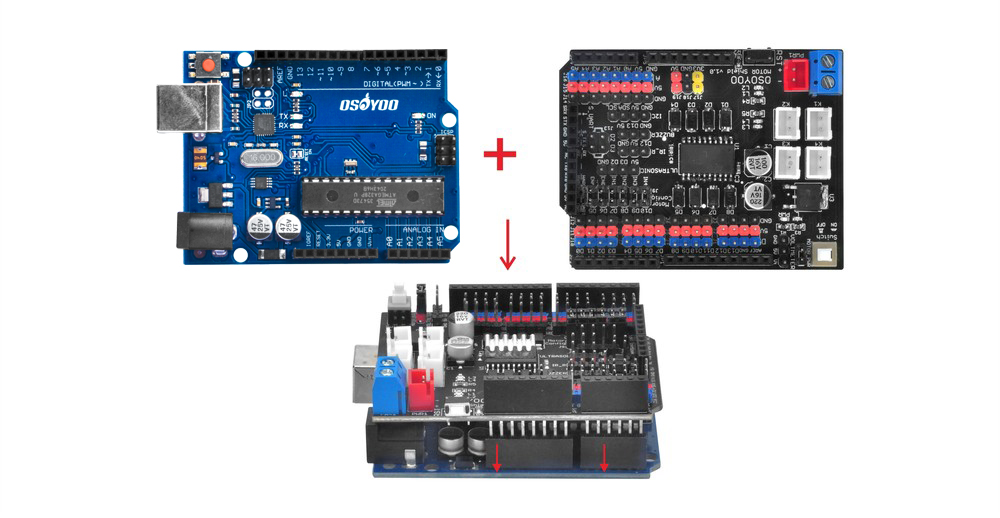
14. OSOYOOモーターシールドボードを次のようにOSOYOO UNOボードに接続します
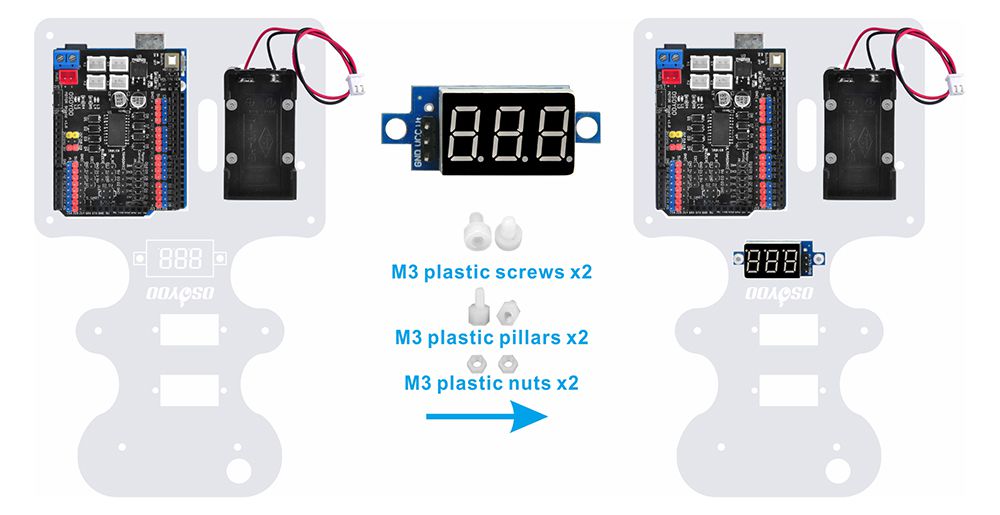
15. 次のように、M3プラスチックネジ、ピラー、ナットを使用して、電圧計をシャーシに取り付けます。
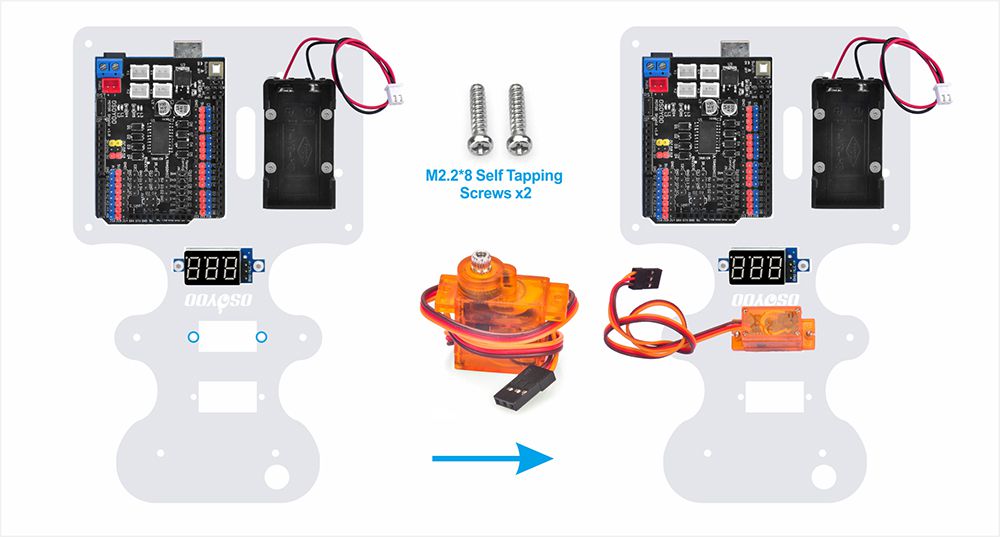
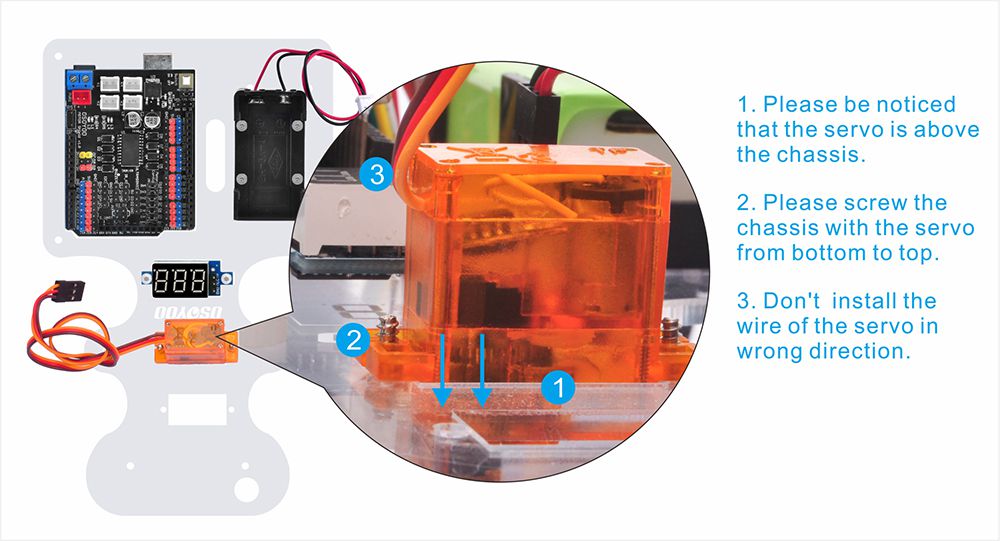
16.MG90Sサーボモーター(オレンジ)を、次のように2本のM2.2 * 8セルフタッピングネジを使用して、上部車のシャーシに上から下に取り付けます。
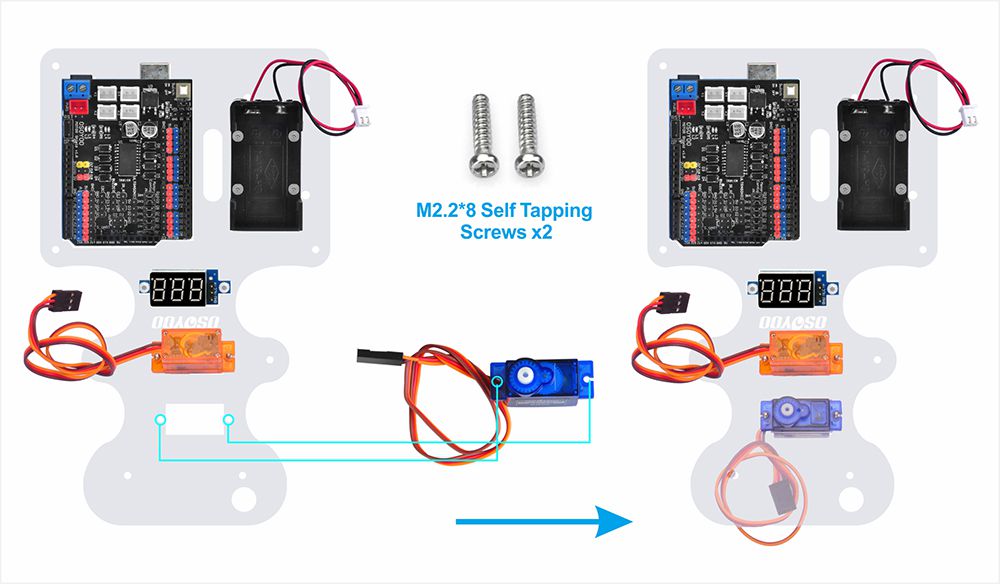
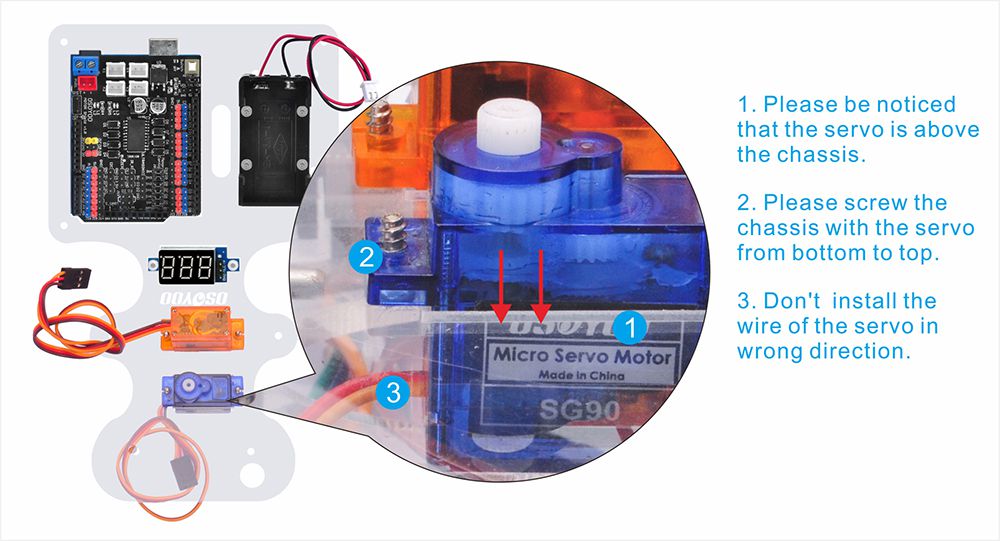
17.次のように、2本のM2.2 * 8セルフタッピングネジを使用して、上部車のシャーシにサーボモーター(青)を下から上に取り付けます。
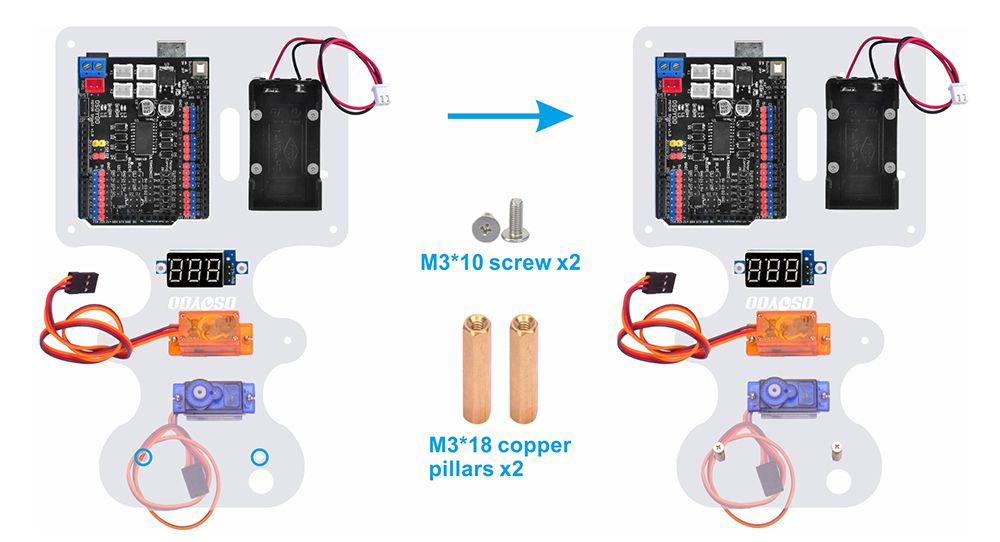
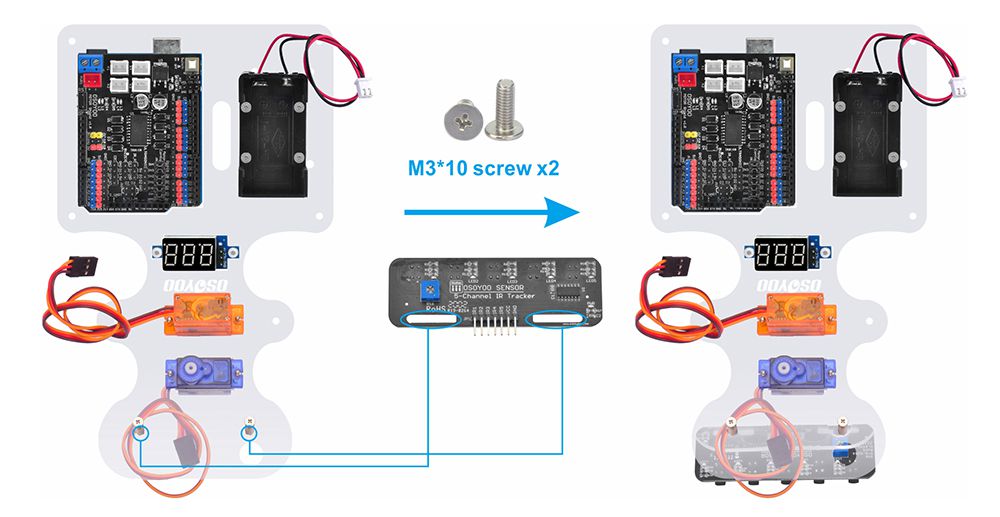
18.次のように、2本のM3 * 18銅柱を2本のM3 * 10ネジで上部車のシャーシの下に取り付けます。
19.次のように、M3 * 18銅柱の下に2本のM3 * 10ネジでトラッキングセンサーモジュールを取り付けます
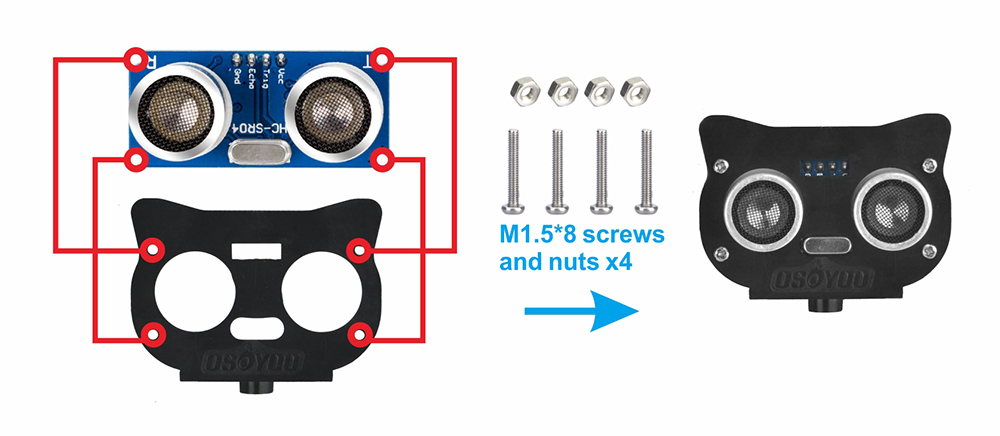
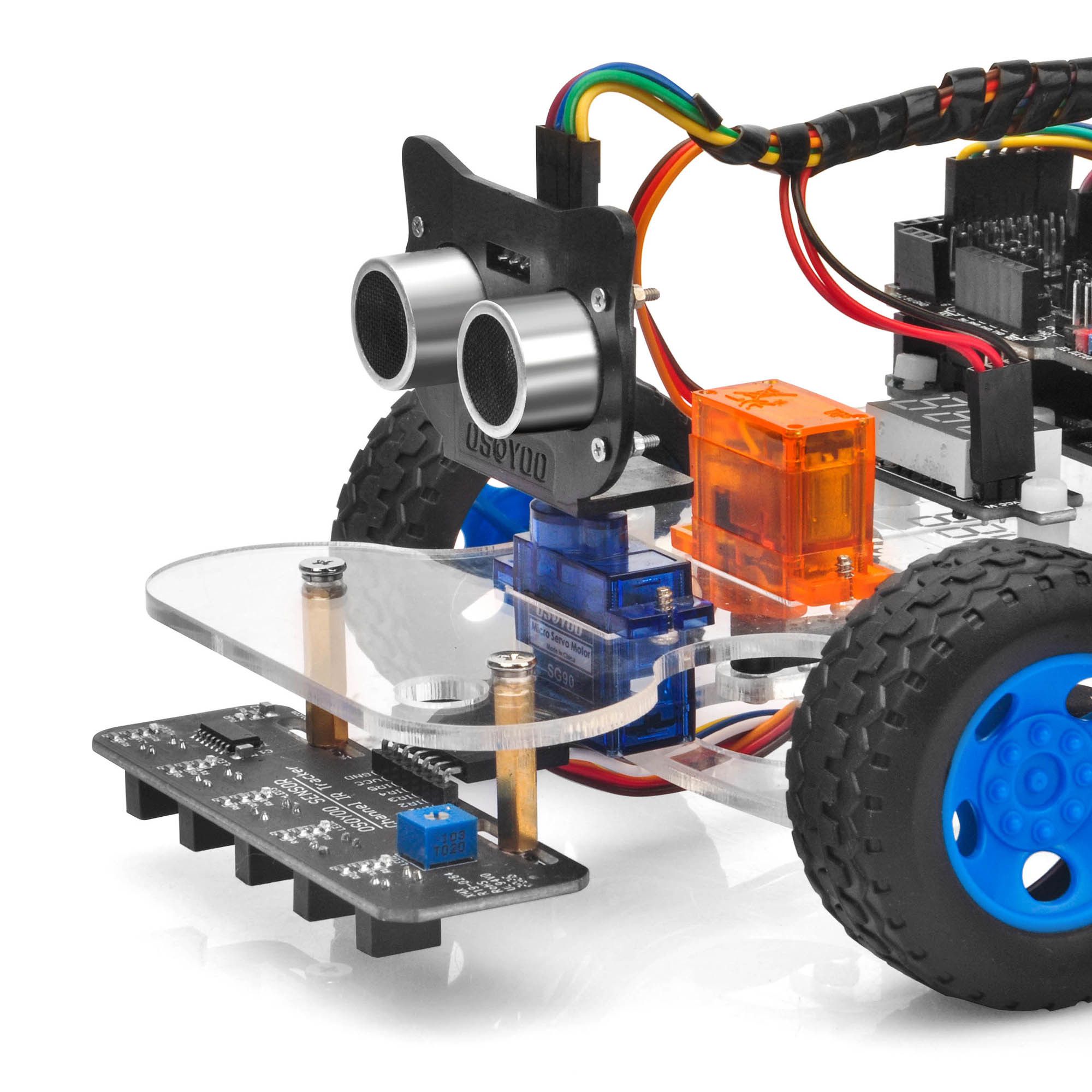
20.次のように、4本のM1.5 * 8ネジとM1.5ナットで超音波モジュールをマウントホルダーに取り付けます
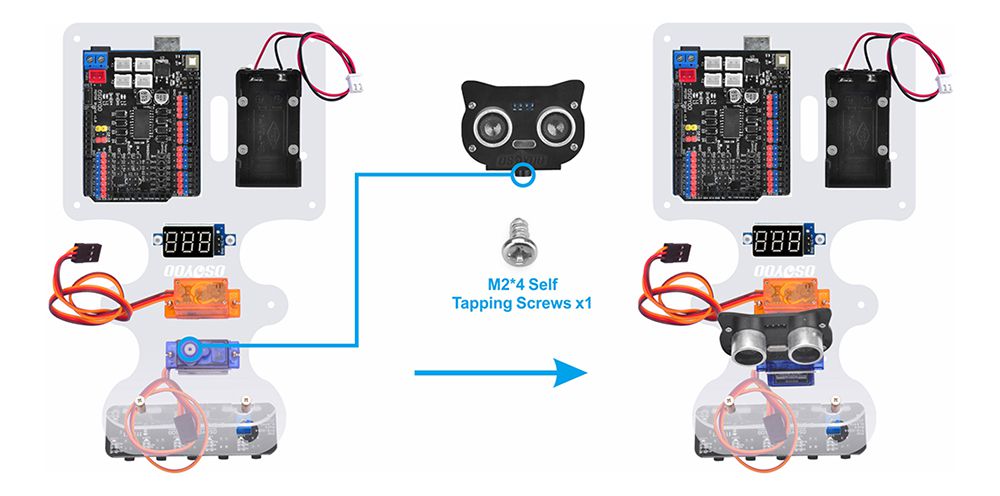
21.超音波モジュール用マウントホルダーを次のようにM2 * 4セルフタッピングネジ付きのサーボモーターに取り付けます
22.次のように、2本のM3 * 8セルフタッピングネジでステアリングカップを上部車のシャーシの下に固定します(注:ステアリングカップを上部シャーシに固定した後も、ステアリングカップをネジ軸を中心に簡単に回転できる必要があります) 。
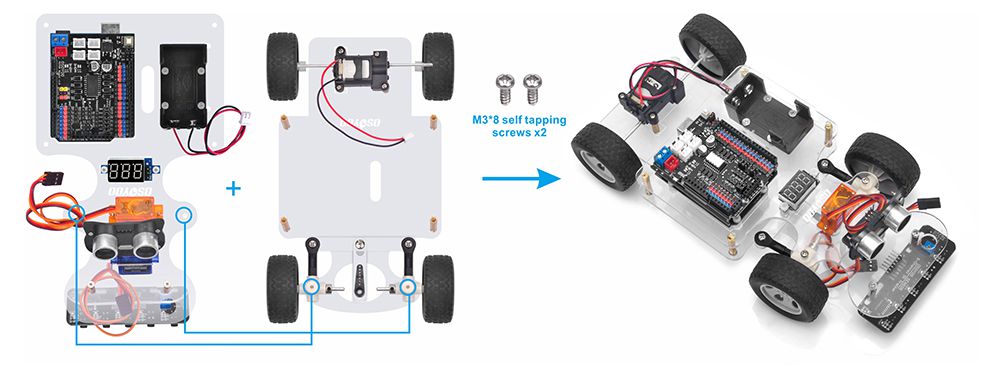
23.次のように、上部車のシャーシと下部の車のシャーシを4本のM3 * 10ネジで固定します
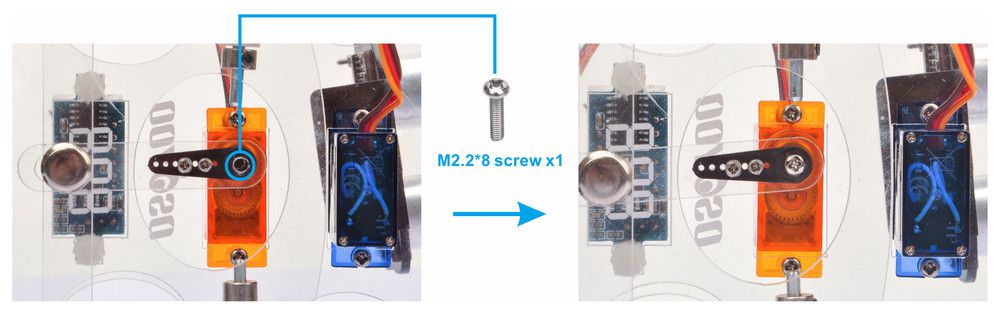
24. MG90Sサーボモーター(オレンジ)を次のように1個のM2.2 * 8セルフタッピングネジで黒いサーボホーンに固定します
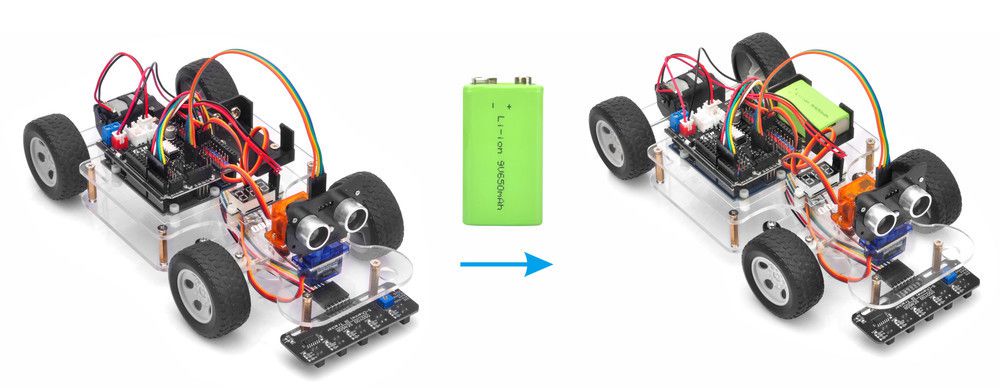
24.次のように9Vバッテリーを取り付けます
接続
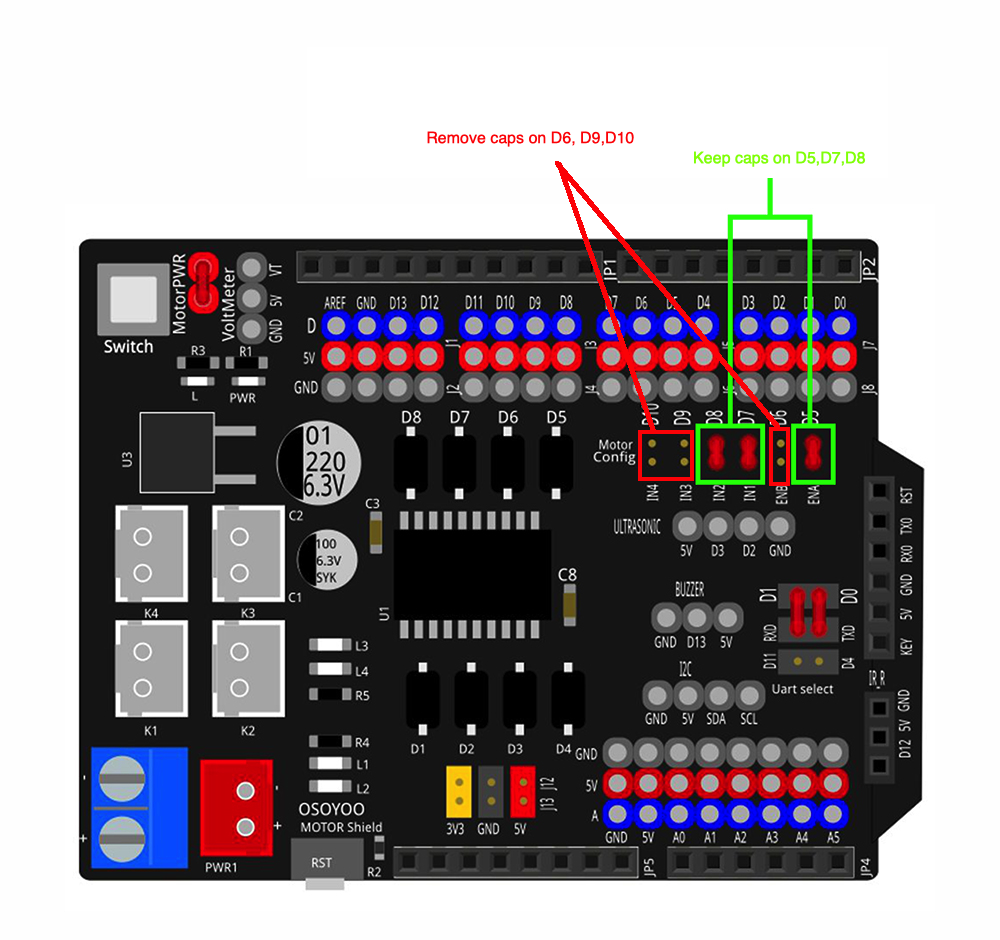
1)ENB-D6、IN3-D9、IN4-D10のジャンパーキャップを取り外します
注:OSOYOOモーターシールドV1.1の詳細については、このリンクを参照してください: https://osoyoo.com/ja/?p=51068
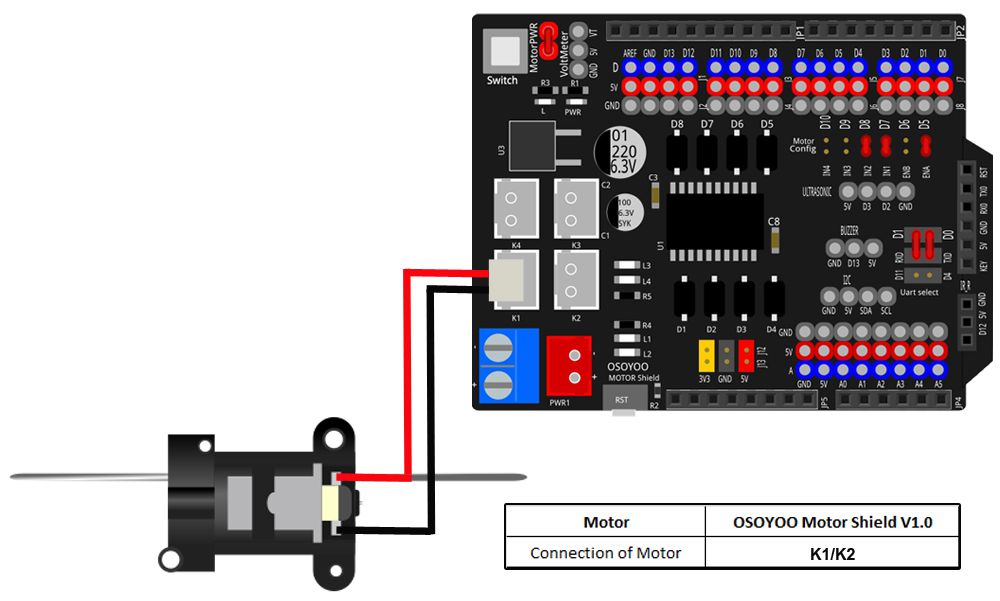
2)モーターをOSOYOOモーターシールドのK1またはK2に接続します。
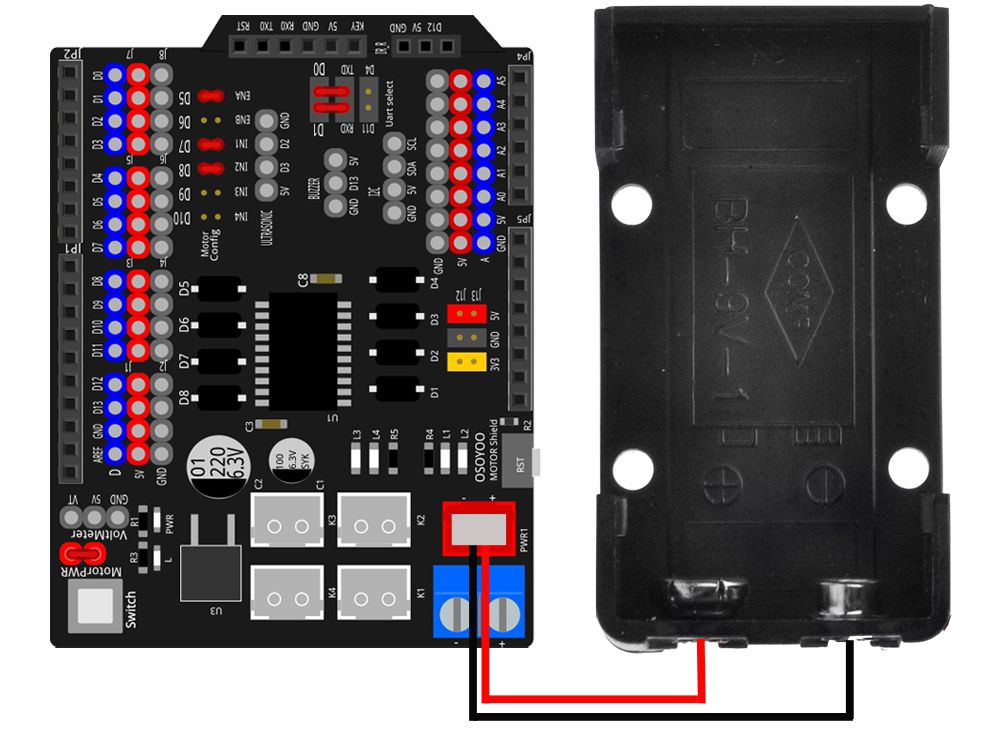
3)バッテリーボックスを次のようにOSOYOOモーターシールドに接続します。
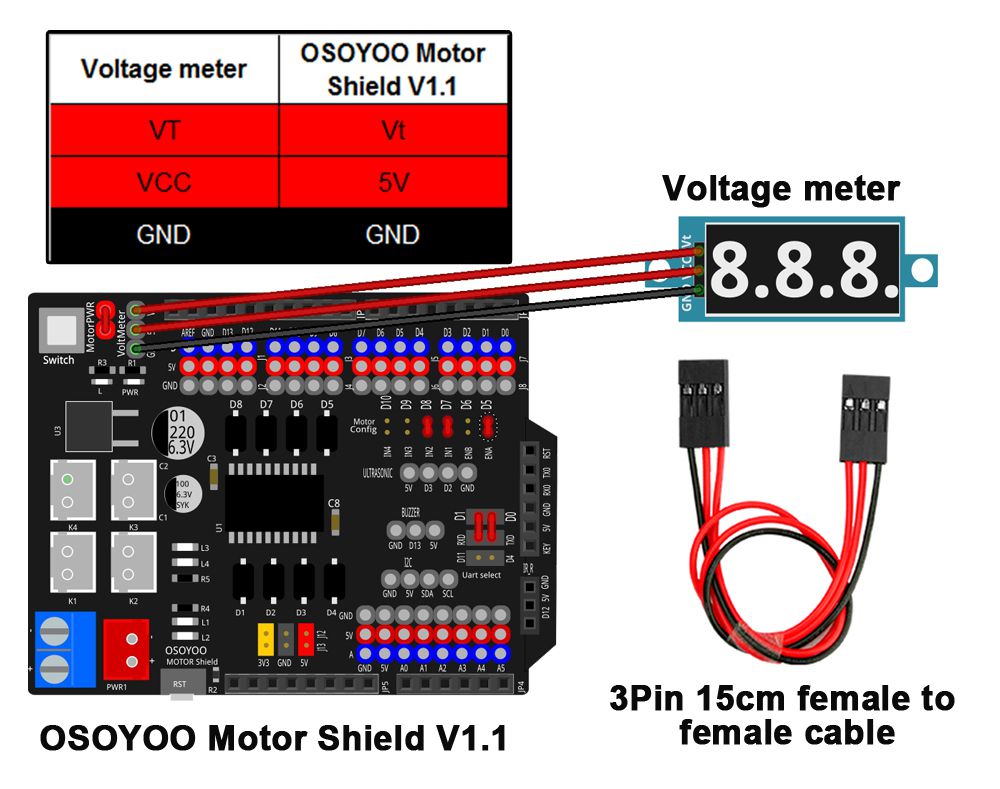
4)電圧計を次のようにOSOYOOモーターシールドに接続します。
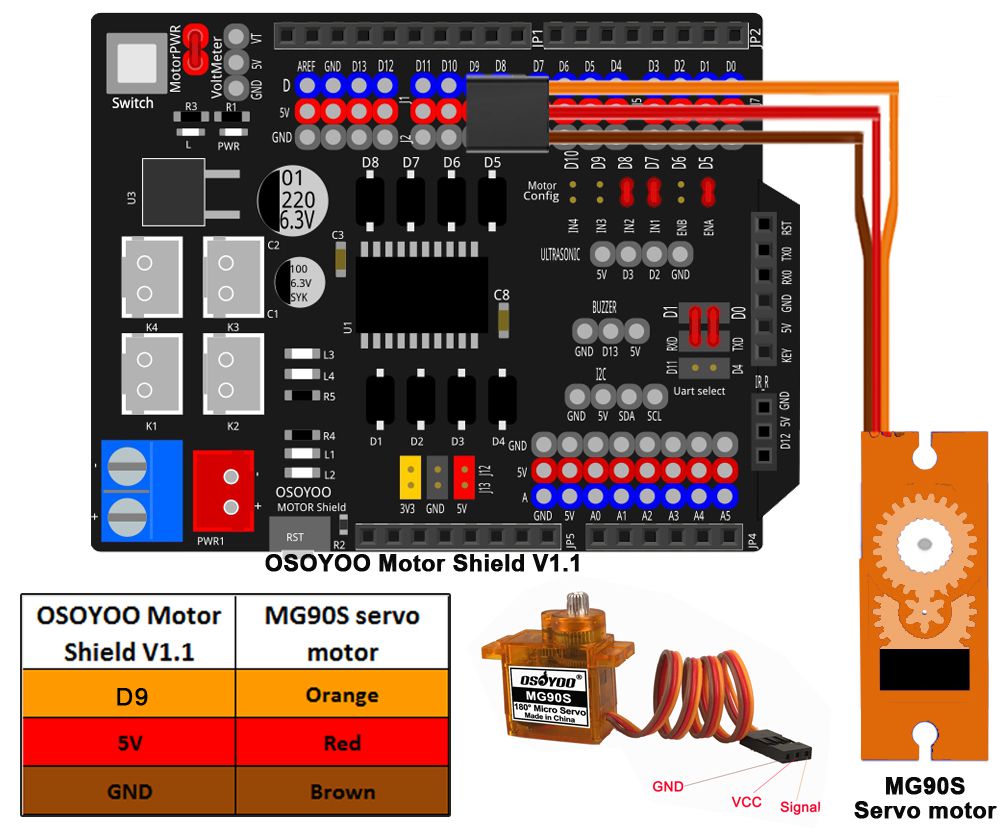
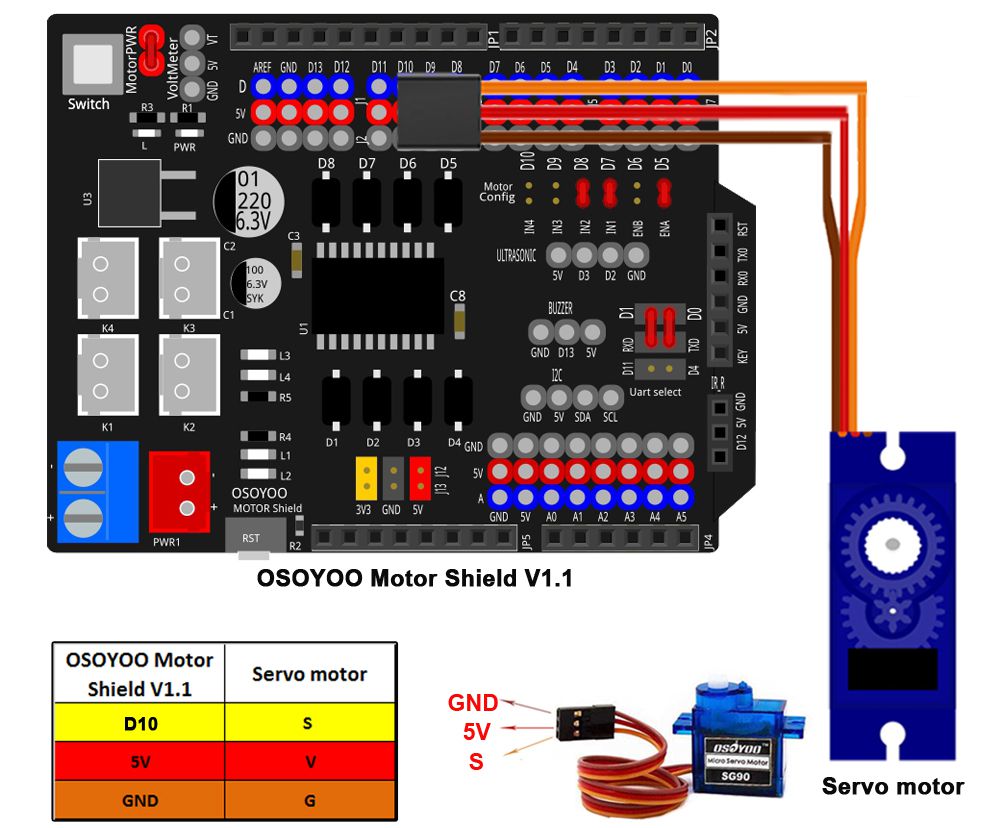
5)MG90Sモーターサーボ(オレンジ)を次のようにOSOYOOモーターシールドのD9に接続します。
6)サーボモーター(青)を次のようにOSOYOOモーターシールドのD10に接続します。
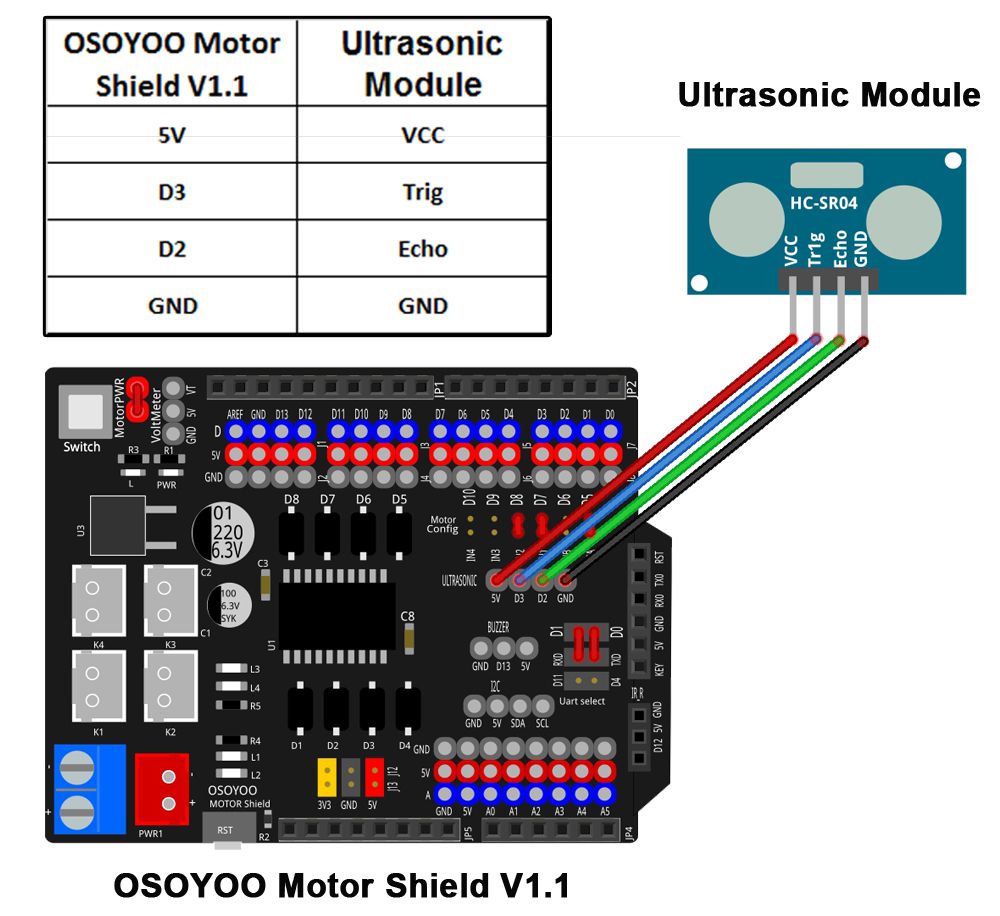
7)超音波センサーを次のようにOSOYOOモーターシールドに接続します。
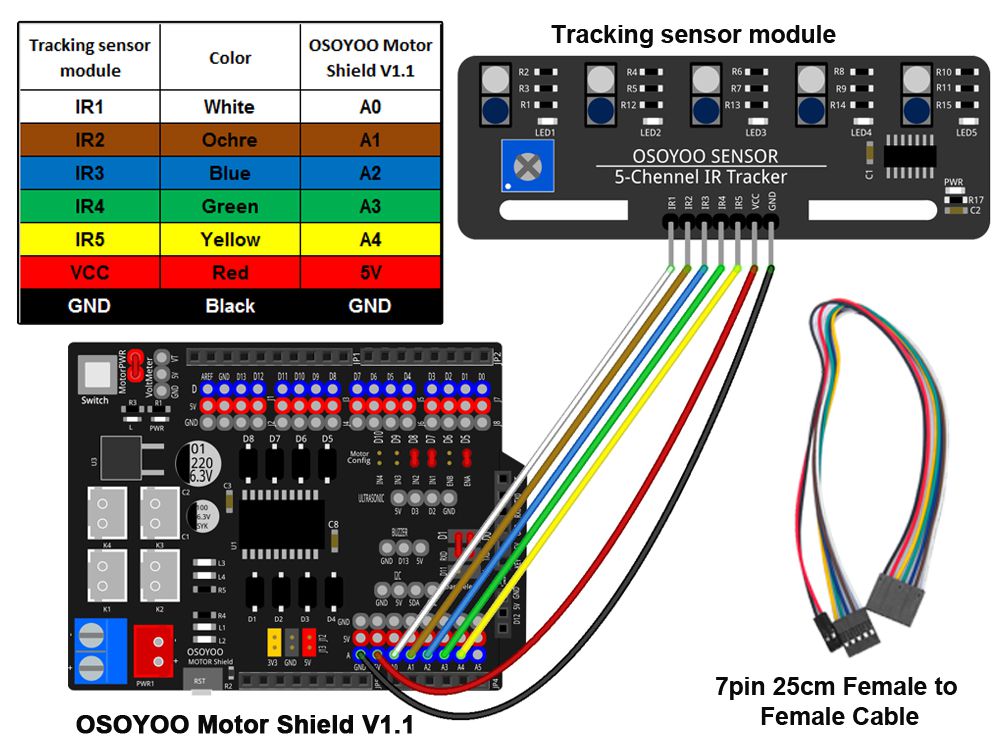
8)トラッキングセンサーモジュールを次のようにOSOYOOモーターシールドに接続します。
これで、ハードウェアのインストールはほぼ完了です。バッテリーをボックスに取り付ける前に、まずサンプルコードをArduinoにアップロードする必要があります。
ソフトウェアのインストール
最新のArduino IDEをインストールします(1.1.16以降のArduino IDEバージョンをお持ちの場合は、この手順をスキップしてください)。https://www.arduino.cc/en/software からArduino IDEをダウンロードし、ソフトウェアをインストールします。
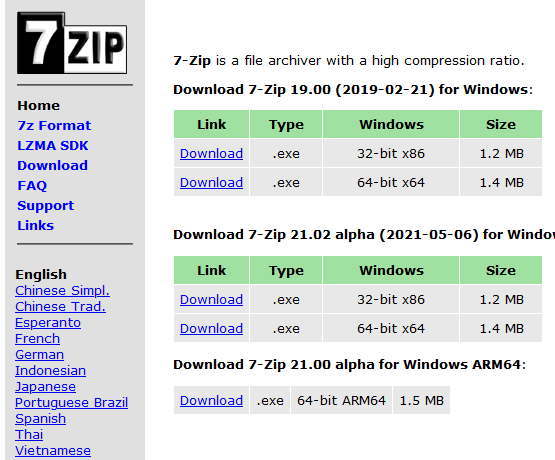
2. zip ユーティリティをインストールして、7 zip などのコード ファイルを解凍します。
ステアリングの校正
サンプルスケッチコードを実行する前に、まずステアリングサーボの方向をテストしてください。
これで、レッスン1のサーボテストスケッチファイル(steering.ino )
ステップ1. 次のスケッチコードをダウンロードして実行してください:https://osoyoo.com/driver/sg90car/steering.zip
ステップ2. このファイルを解凍すると、steering という名前のフォルダが表示され、このフォルダに入ると、steering.ino ファイルが見つかります。
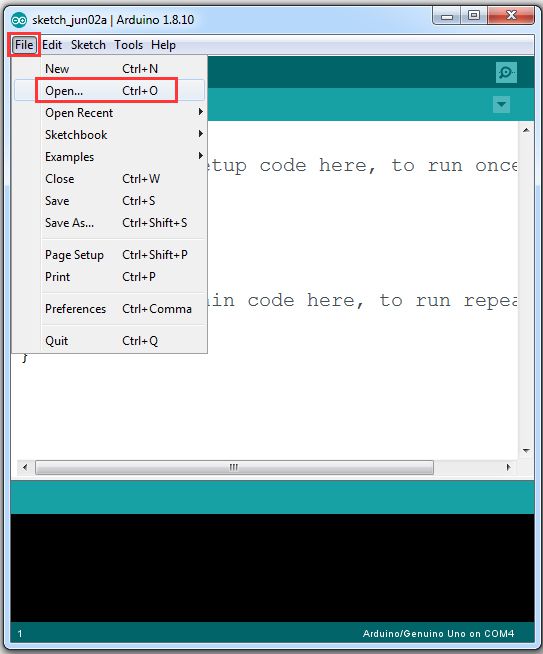
ステップ3 .UNO R3ボードをUSBケーブルでPCに接続し、Arduino→IDEを開き、ファイルをクリックして→開く→クリックします ステアリングフォルダ内の コード「steering.ino 」を選択し、コードをArduino用のOSOYOOベーシックボードにロードします
注意: スケッチコードをArduino用OSOYOOベーシックボードにアップロードするときは、バッテリーを切るか、電源アダプターを抜いてください。
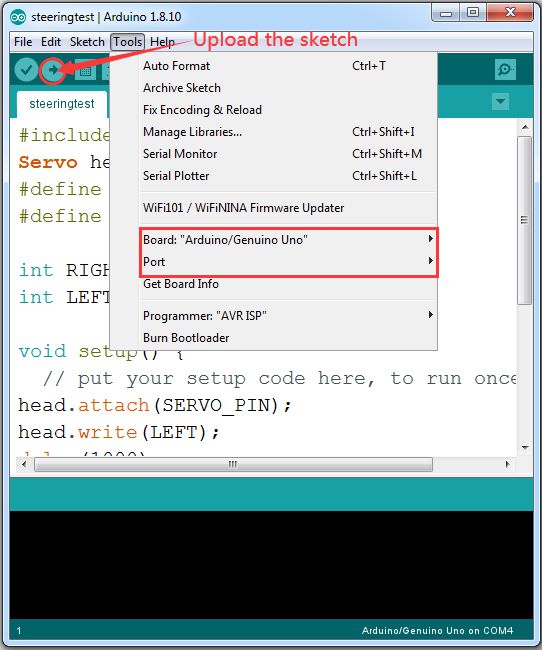
ステップ4. プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
ステップ5.電源スイッチを投入すると前輪は左回り、右回り、前に回復を順次に動作します。前に回復する後(オレンジServoが完全に停止するとき)、もし前輪は前向きではない場合、ステアリングの校正が必要です :方法1)下記のリンク動画をご確認し、ステアリングの校正を手続きします。(注意点:校正している時、オレンジServoは回さないでください
VIDEO 方法2) 4行目の デフォルト値を変更します。
#define FRONT 90 ハンドルが左になる傾向がある場合は、値を90から95,100,105に増やします…
次に、FRONT値を書き留め、この値を使用してレッスン2,3,4,5,6スケッチコードを変更し、ステアリングサーボが常にデフォルトのFRONT値で正面を向くようにします。



































Bonjour,
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
Cordialement,
Noah
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.