


I.目的
II.パーツとデバイス
III.ハードウェアの取り付け
IV.ソフトウェアのインストール
VI.遊び方

| Buy from US |
Buy from UK |
Besorgen DE |
Acquistare IT |
Acheter FR |
Comprar ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

このレッスンでは、障害物回避自動運転プロジェクトを行います。超音波モジュールを使用して障害物を「見る」ようにし、車は自動的に障害物から回避します。
このレッスンを続ける前にレッスン1を完了する必要があります。
PDFチュートリアルをダウンロード:https://osoyoo.com/manual/2021006600.pdf
OSOYOOロボットカーの取り付けビデオ: https://osoyoo.com/manual/2021006600.html

OSOYOO Mecanumホイールロボットカーシャーシx1
OSOYOOホイールとモーターx4(左ホイールx2 / 右ホイールx2)
OSOYOO Mega2560ボード(Arduino UNO / Mega2560と完全互換)x1
OSOYOO Uart WIFIシールドx1
OSOYOOモデルYドライバーボードx1
OSOYOO電圧計x1
OSOYOO MG90サーボモーターx1
OSOYOO超音波センサーモジュールx1
OSOYOOマウントホルダーx1
OSOYOOバッテリーボックスx1
OSOYOO 3ピンメスからメスのジャンパーワイヤx1
OSOYOO 6ピンオスからメスのジャンパーワイヤx2
OSOYOO 10ピンオスからメスのジャンパーワイヤx1
OSOYOO 2ピンXH.25メスからメスx1
18650バッテリー(3.7V)x2
バッテリー充電器x1

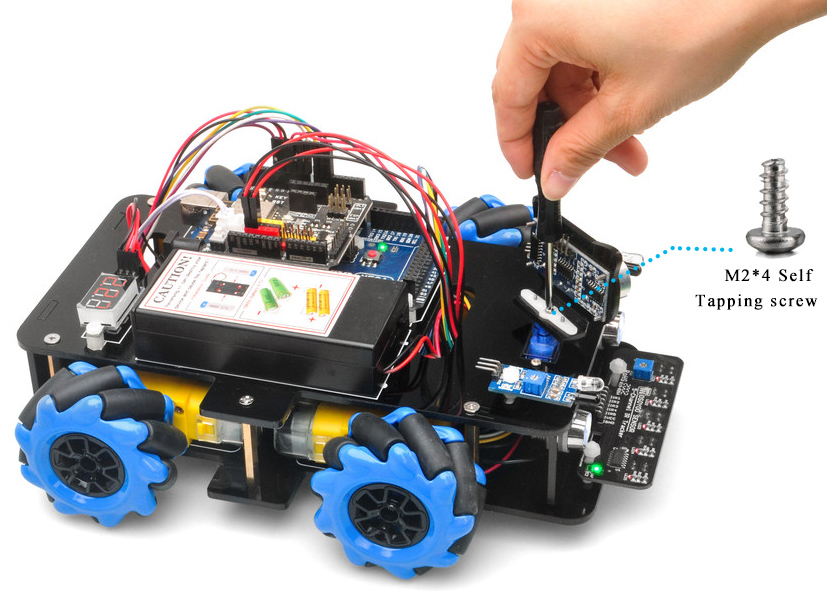
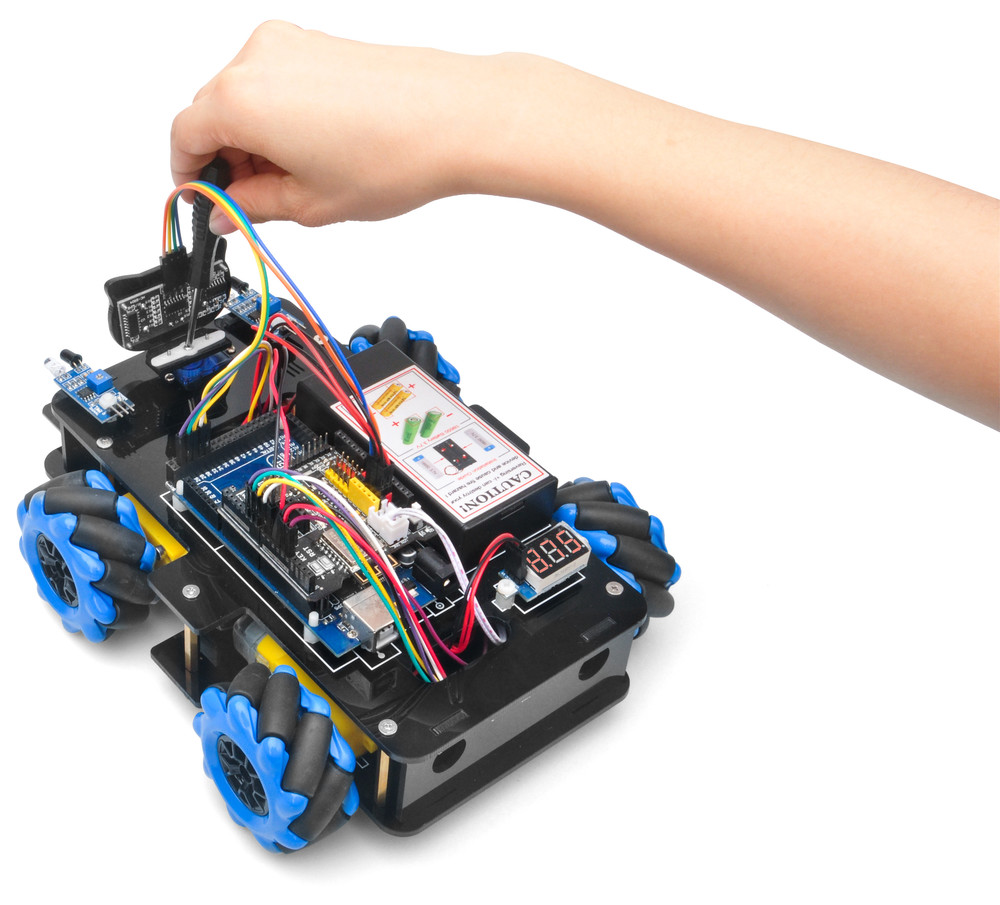
1)Ultrasonic Moduleをマウントホルダーに4つのM1.5×8のねじとM1.5ナットで取り付けます。

2)超音波を下に配置する場合は、自己タッピングねじが簡単にストリップするため、M2×4の自己タッピングねじでサーボモーターにUltrasonic Module用のマウントホルダーを取り付けます。
A. 自己タッピングねじが簡単にストリップするため、モーターを下からサポートしてください。
B. 整列プロセス後にねじを挿入しないでください。
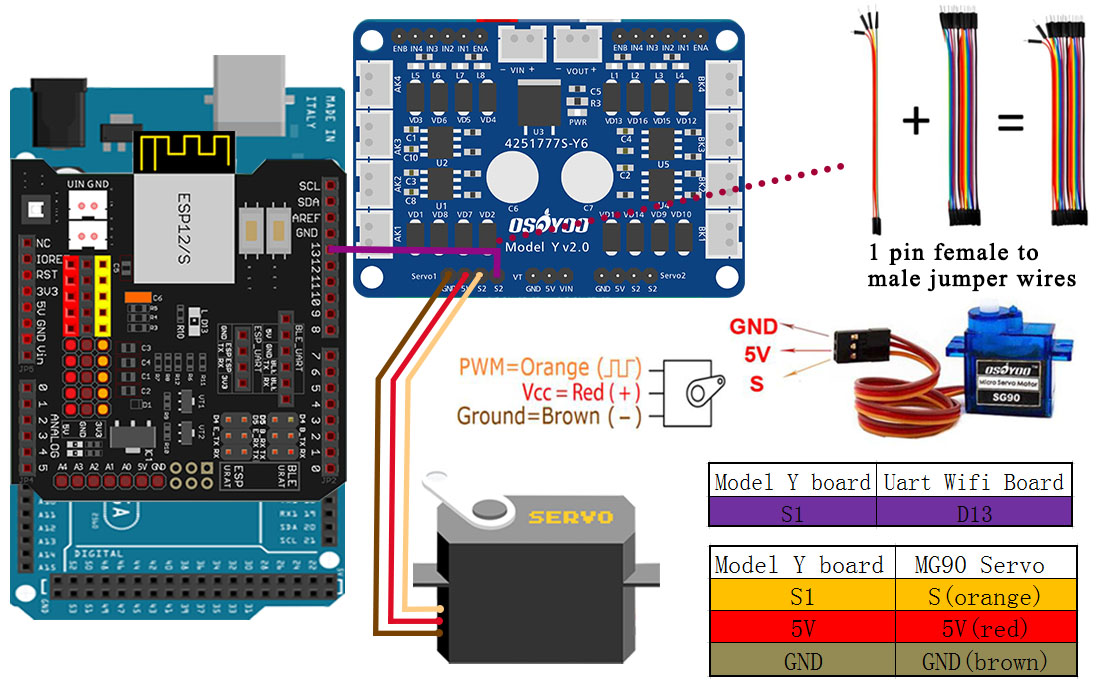
3)全てのレッスン1の接続を同じままにしてください。配線を接続する前に、SG90サーボモーターをモデルYボードとOSOYOO UART WiFiシールドに以下のように接続したことを確認してください。
(注意:当社の10ピンジャンパワイヤバンドルから1つのメス-メスジャンパワイヤを分割する必要があります。バンドルからの任意の色が問題ありません。残りのワイヤは、潜在的に破損または損傷したワイヤの予備部品として使用できます。)
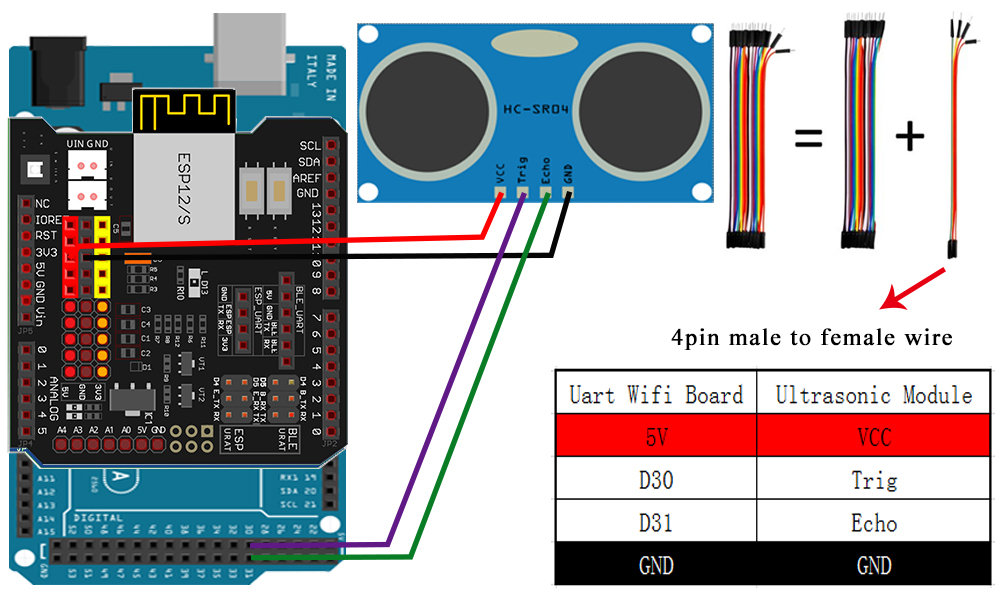
4)以下のようにOSOYOO Uart WiFiシールドと超音波モジュールを接続します。

Step 1: 最新のArduino IDEをインストールします(Arduino IDEバージョン1.1.16以降を使用している場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=enからArduino IDEをダウンロードして、ソフトウェアをインストールします。
Step 2: https://osoyoo.com/driver/mecanum_acrylic_chassis_v2/mc-lesson2.zipをダウンロードし、ダウンロードしたzipファイルmc-lesson2.zipを解凍すると、mc-lesson2.zipというフォルダが表示されます。
Step 3: USBケーブルでMega2560ボードをPCに接続し、Arduino IDEを開いて、ファイル->開く->lesson1フォルダのコード「lesson2.ino」を選択し、コードをArduinoにロードします。
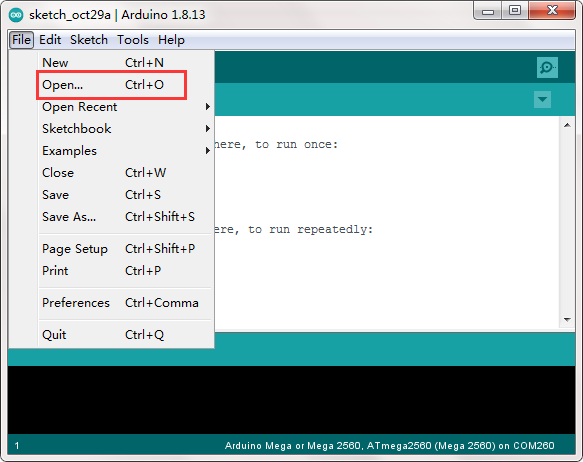
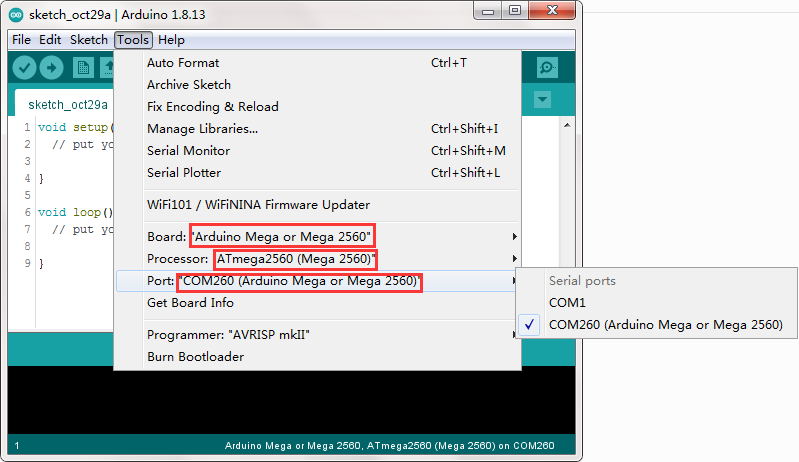
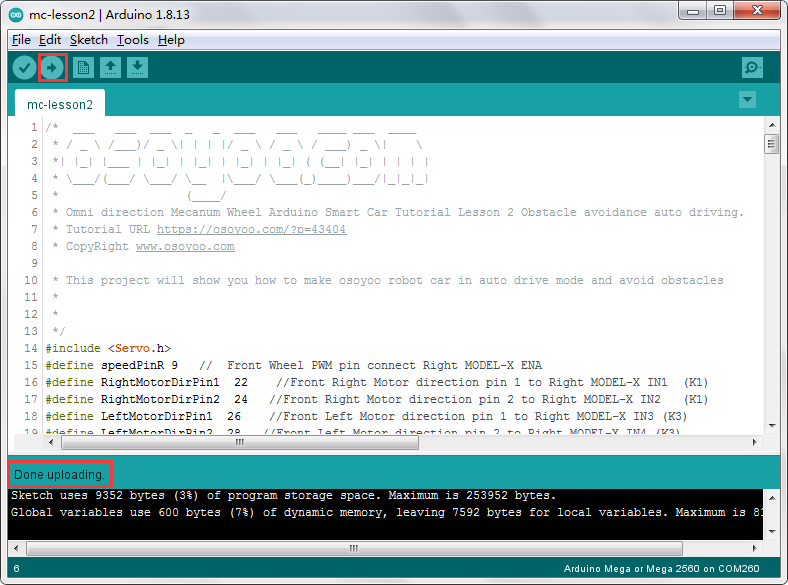
Step 4: MEGA2560ボードをボードタイプとプロジェクトに適したポートとして選択し、以下の画像のようにスケッチをボードにアップロードします。

超音波センサーサーボ初期方向整列
バッテリーをオンにすると、サーボモーターは一定の動きをして、最終的に3秒間前方に停止します。
この最初の3秒間に超音波センサーが前方を向いていない場合は、すぐにバッテリーを切り、センサーをサーボモーターから取り外し、再度取り付け、以下の図に示すようにまっすぐ前方を向くようにしてください。そうしないと、障害物回避プログラムが正常に動作しない可能性があります。
センサーの方向を調整したら、再びバッテリーをオンにし、センサーが以下の図のように正面を向いていることを確認してください。もし方向がまっすぐ前方を向いていない場合は、バッテリーを切り、再度方向を合わせてください。
最終的なテスト:
バッテリーボックスのスイッチをオンにした後、超音波モジュールが前方の位置に向きを変えると、もうセンサーの位置を調整する必要がないことを意味します。3秒間待つだけです。障害物が検出されない場合、車は前進します。障害物が検出されると、車は停止し、超音波モジュールは周囲の障害物を検出するために右から左に向きを変えます。ロボットカーは、障害物センサーデータと障害物回避アルゴリズムに基づいて、左折、右折、またはバックワードを決定します。
時には、車が衝突して超音波センサーの位置が変わることがありますので、必ず超音波センサーサーボ初期方向調整のリンクに従ってセンサーの方向を調整してください。
トラブルシューティング:
レッスン2のスケッチコードを実行すると、前方に障害物がなくても車が後退することがあります。これは、超音波センサーの取り付けやワイヤーの接続に問題がある可能性があります。
問題を解決するには、hardware installation step 4をご確認し、4本の新しいジャンパーワイヤーを使用してセンサーをArduino Wifiボードに接続してください。
確認してください:
超音波センサーのVccはWifiボードの5Vに接続されています。
超音波センサーのTRIGはWifiボードのD30に接続されています。
超音波センサーのECHOはWifiボードのD31に接続されています。
超音波センサーのGNDはWifiボードのGNDに接続されています。
上記の指示に従って、センサーワイヤーが正しく接続されたら、センサーのテストを行うことができます。
https://osoyoo.com/download/code/distance.zipから距離センサーテストコードをダウンロードし、ArduinoとPCを青いケーブルで接続した状態で、distance.inoコードを実行してください。
Arduino IDEのシリアルモニターを開き、センサーの前に手を置いてください。

シリアルモニターに距離値が表示されます。その値は手とセンサーの間の距離です。
シリアルモニターで0の値しか表示されない場合は、センサーワイヤーの接続が間違っているか、ワイヤーが断線しているか、センサーが不良品である可能性があります。4本の新しいワイヤーに交換する必要があるか、OSOYOO support に連絡してセンサーを交換する必要があるかもしれません。












Thank You!