


I. 目的
II. 部品とデバイス
III. ハードウェアの取り付け
IV. ソフトウェアのインストール
V. 遊び方

| アメリカで購入 |
イギリスで購入 |
Besorgen DE |
Acquistare IT |
Acheter FR |
Comprar ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |

モデル 2021006600
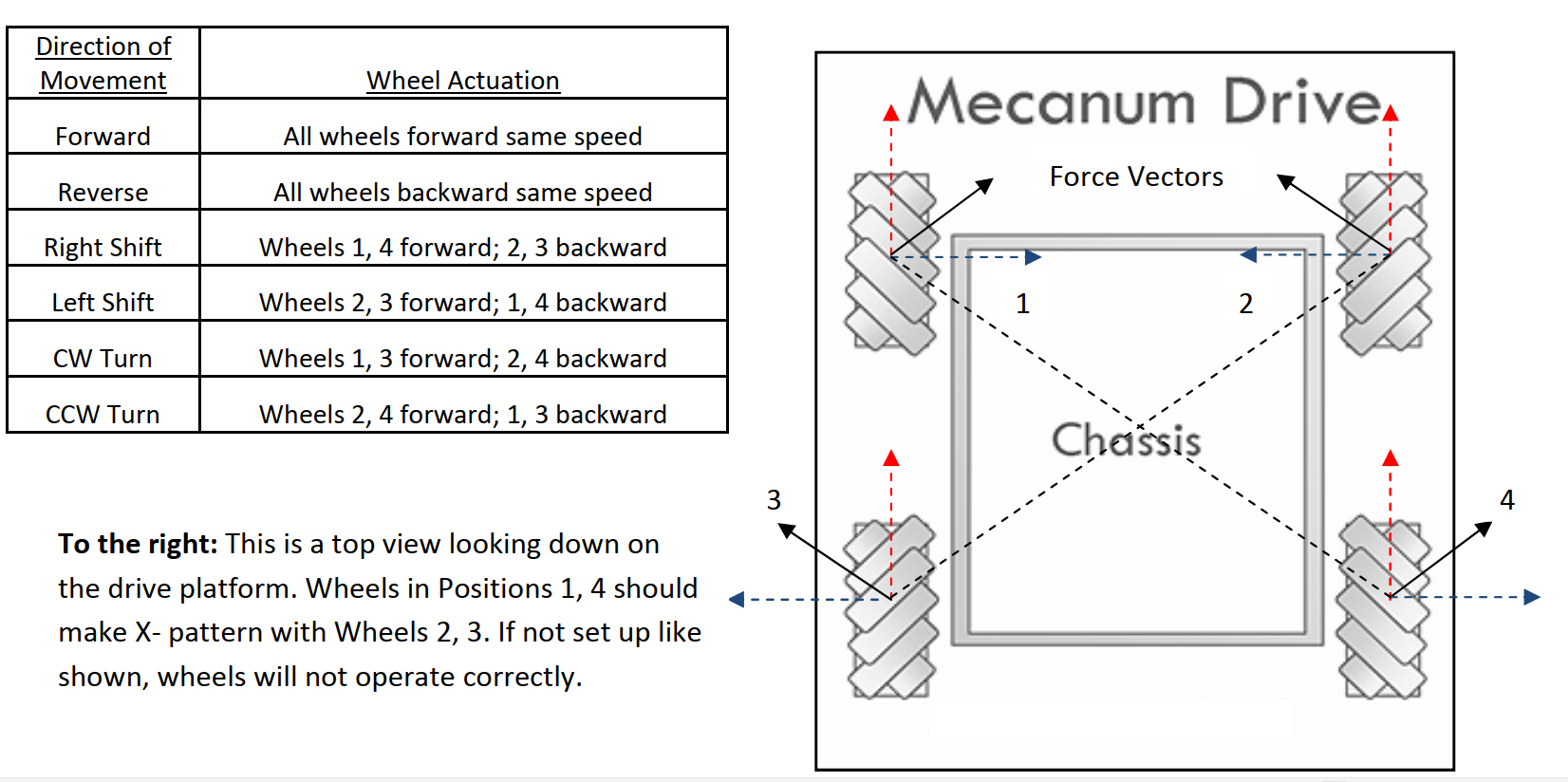
メカナムオムニディレクションホイールは、ロボットカーが全方向移動(例:左右への平行移動)を可能にする非常に興味深いホイールです。
このプロジェクトでは、ArduinoでOSOYOOブランドのメカナムホイールロボットカーを制御し、前進、後退、左折、右折、左平行移動、右平行移動などの基本的な動きを行う方法を紹介します。
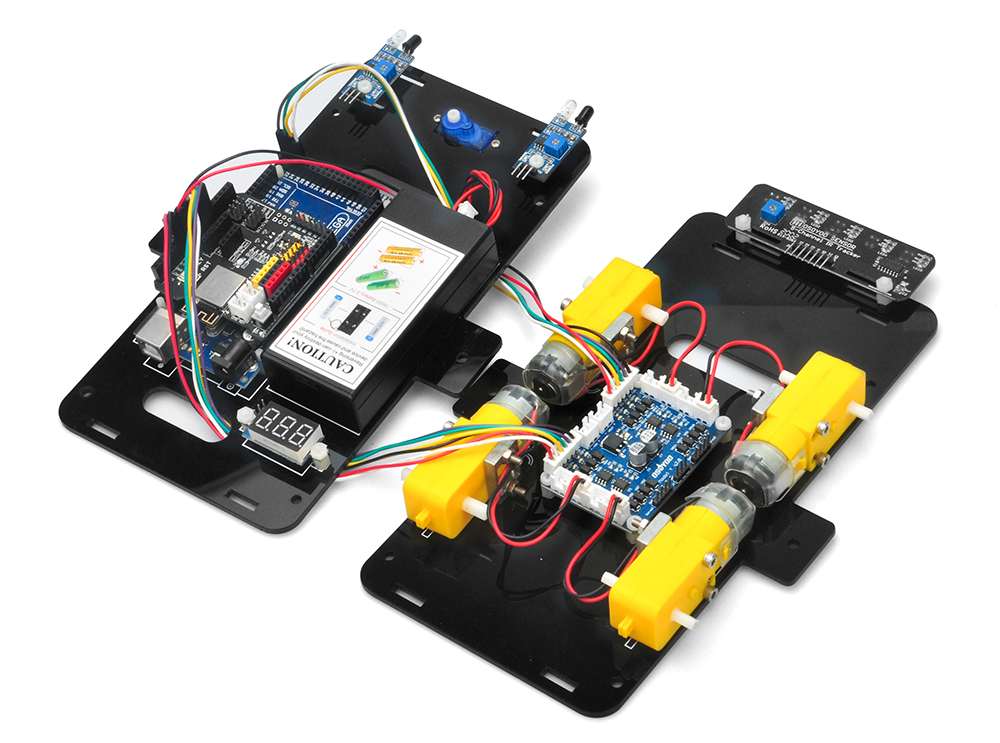
このレッスンでは、この車のシャーシの取り付け方法と、Arduino制御信号線をモデルYボードに接続する方法も説明します。この取り付けは、他のレッスンの出発点となります。

OSOYOOメカナムホイールロボットカーシャーシ x1
OSOYOOホイールとモーター x4(左ホイール x2/右ホイール x2)
Arduino UNO/Mega2560と完全互換のOSOYOO Mega2560ボード x1
OSOYOO Uart WiFiシールド x1
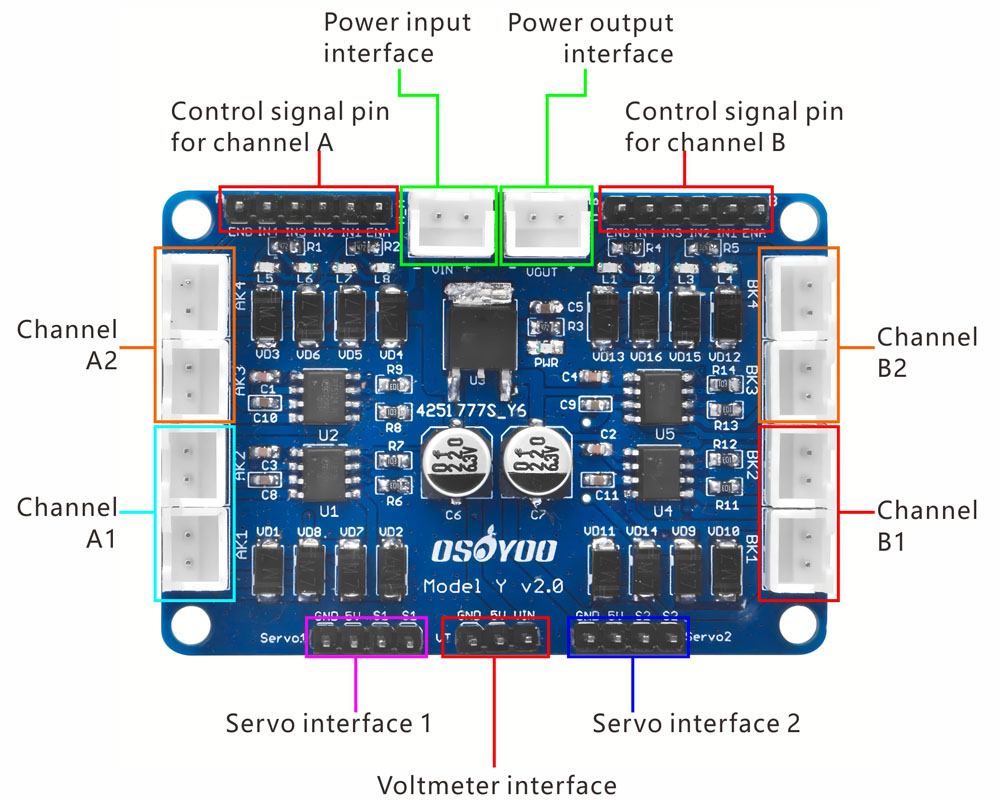
OSOYOOモデルYモータードライバーボード
(4つの独立したチャンネルと8つのPWM出力ポートを制御できる2個のTB6612 Hブリッジドライバーが統合されています。)
OSOYOO電圧計 x1
OSOYOOバッテリーボックス x1
OSOYOO 6ピンオス-メスジャンパーワイヤー x2
OSOYOO 3ピンメス-メスジャンパーワイヤー x1
OSOYOO 2ピンPnPメス-メス x1
18650バッテリー(3.7V)x2
バッテリー充電器 x1

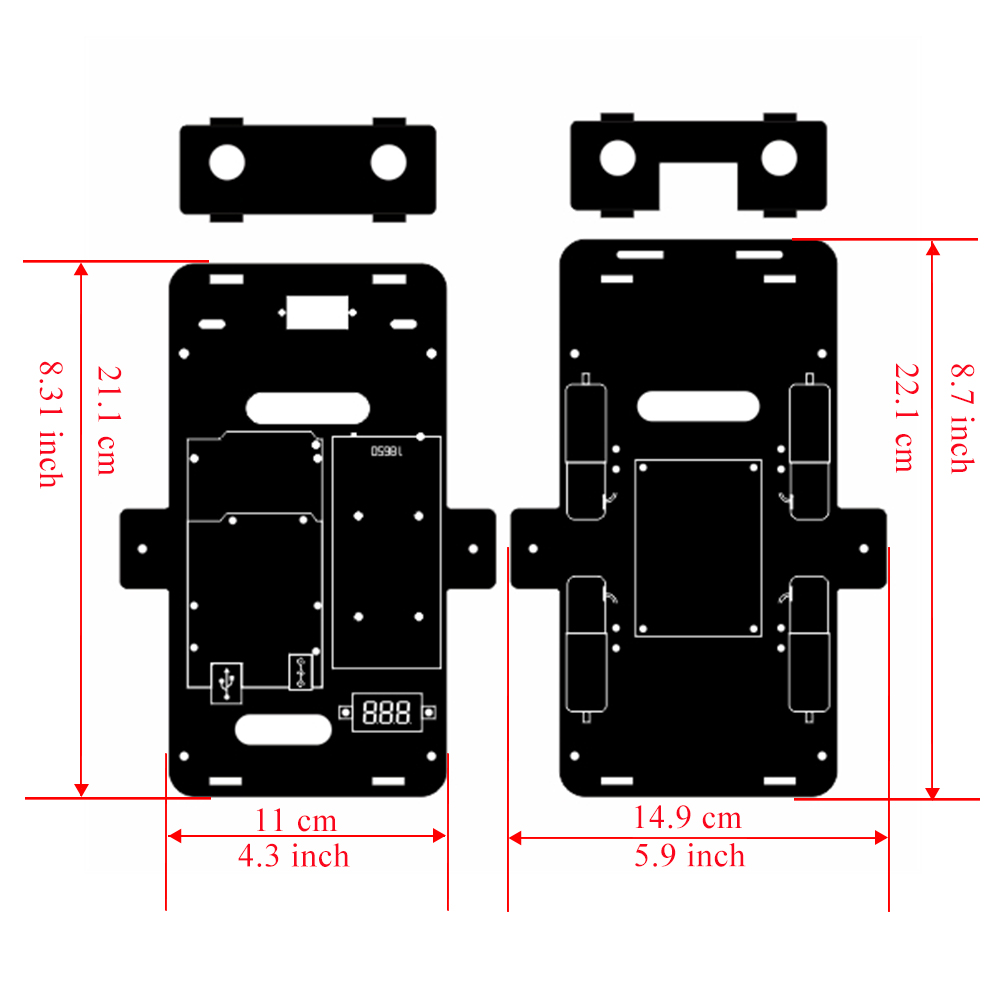
寸法

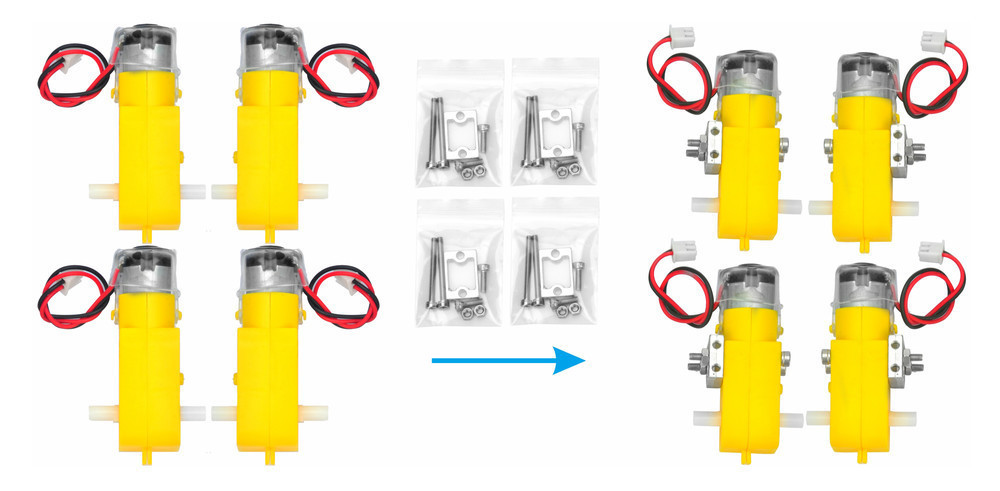
1)図に示すように、金属製モーターホルダーを使用して4つのモーターを取り付けます。(金属製モーターホルダーを取り付ける前に、モーターの向きが正しいことを確認してください。)
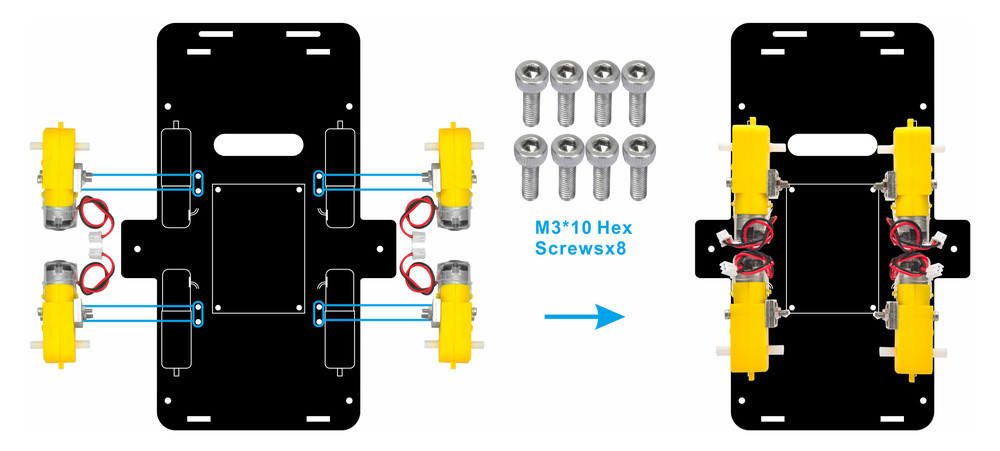
2)画像に示すように、M3*10六角ネジと六角ドライバーを使用して、4つのモーターを下部車体シャーシに固定します。(この手順に必要なネジは、金属製モーターホルダーパッケージに含まれています。)
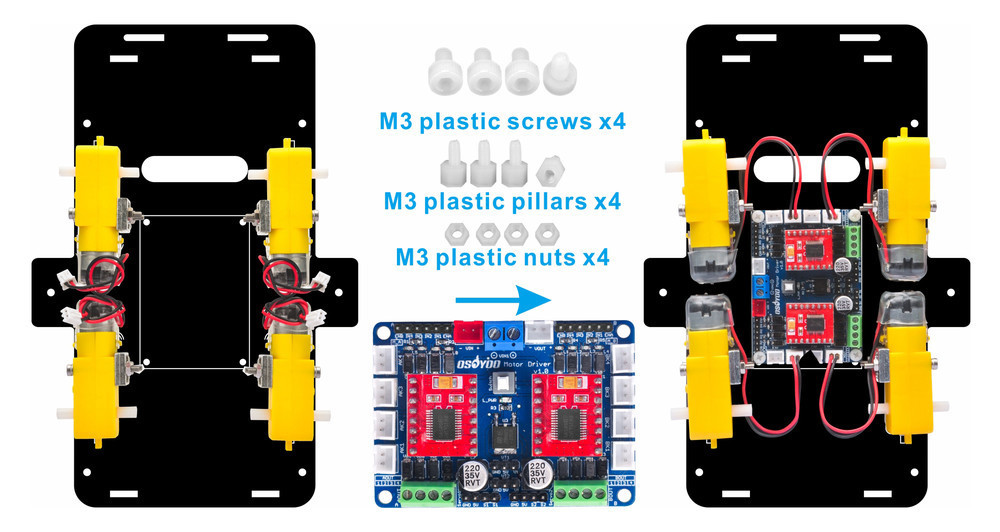
3)4本のM3プラスチックネジ、プラスチック支柱、プラスチックナットを使用して、OSOYOOモデルYドライバーボードを下部車体シャーシに取り付けます。(プラスチック支柱のオス端を下向きに取り付けることをお勧めします。)
(OSOYOOモデルYドライバーボードが正しい向きで取り付けられていることを確認してください。)
プラスチック支柱には2つの取り付けモードがあります:
A. プラスチック支柱のオス端を下向きにする。
B. プラスチック支柱のオス端を上向きにする。
4)図に示すように、4つのモーターをモデルYモータードライバーボードのK1およびK3ソケットに接続します。
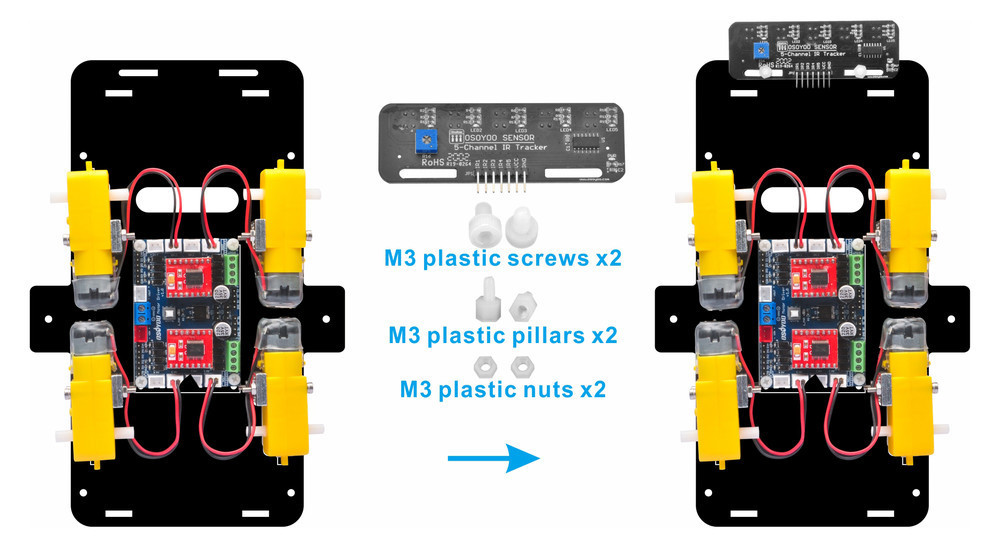
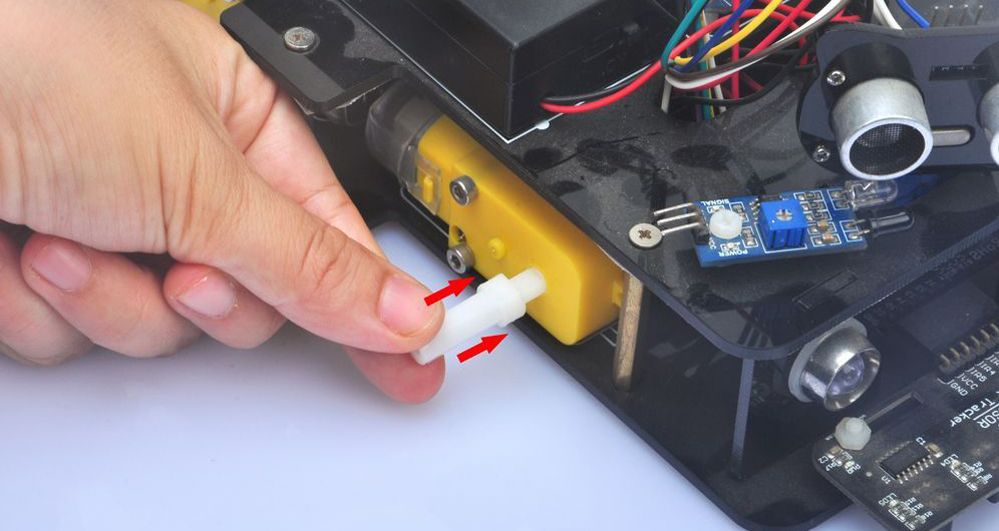
5)2本のM3プラスチックネジ、2本のM3プラスチック支柱、2個のM3プラスチックナットを使用して、トラッキングセンサーモジュールを下部シャーシに取り付けます。(プラスチック支柱のオス端を上向きに取り付けることをお勧めします)。センサーがしっかりと固定され、正確な機能のために適切に位置合わせされていることを確認してください。
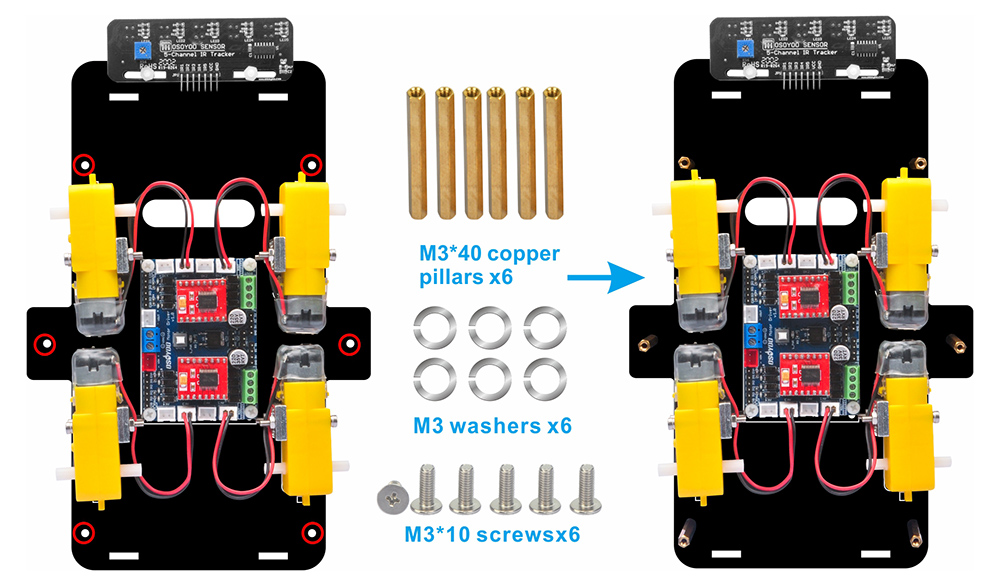
6)6本のM3*40銅支柱を、6本のM3*10ネジと6個のM3ワッシャーを使用して下部シャーシに取り付けます。支柱がしっかりと固定され、上部シャーシに安定したサポートを提供することを確認してください。
ワッシャーをネジに通してください。ワッシャーはネジの圧力を分散し、金属支柱にネジを固定する際の安定性を向上させます。
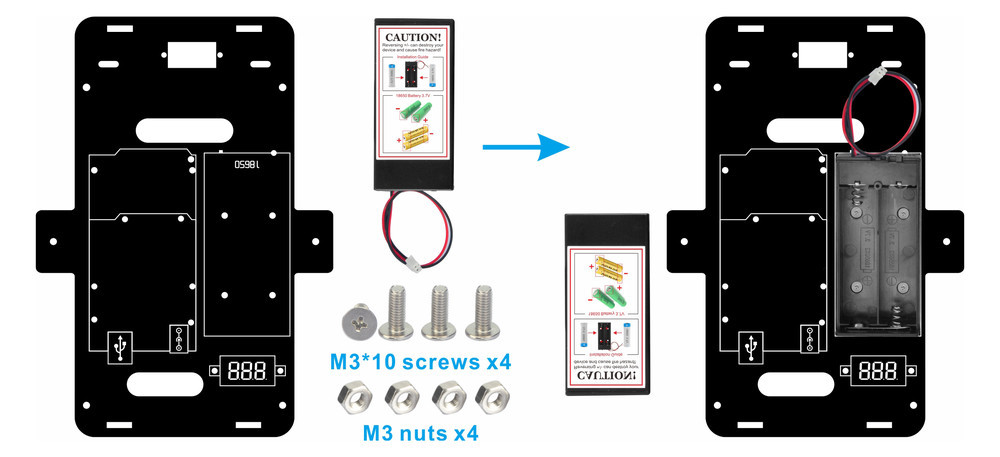
7)M3*10ネジとM3ナットを使用して、バッテリーボックスを上部シャーシの指定されたマーキングに取り付けます。
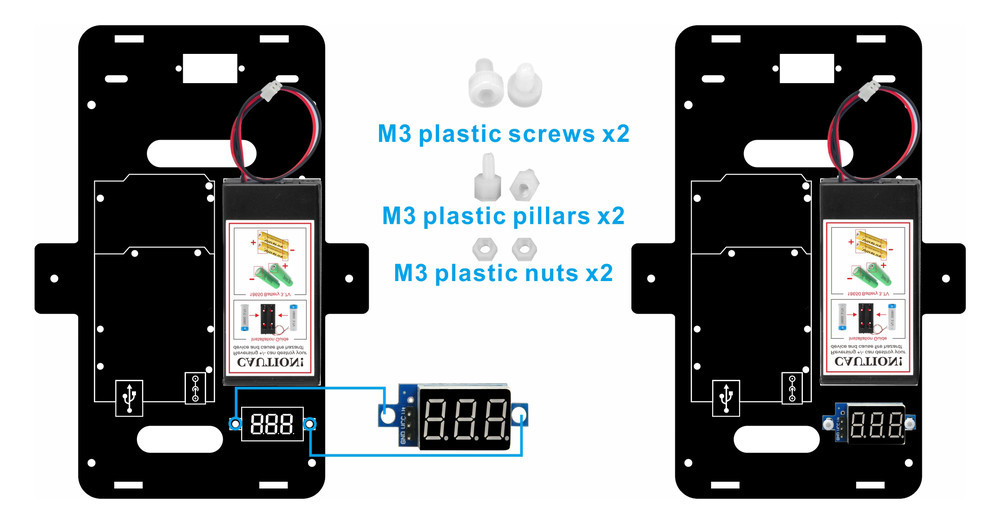
8)2本のM3プラスチックネジ、2本のM3プラスチック支柱、2個のM3プラスチックナットを使用して、電圧計を下部シャーシの指定されたマーキングに取り付けます。(プラスチック支柱のオス端を上向きに取り付けることをお勧めします。)
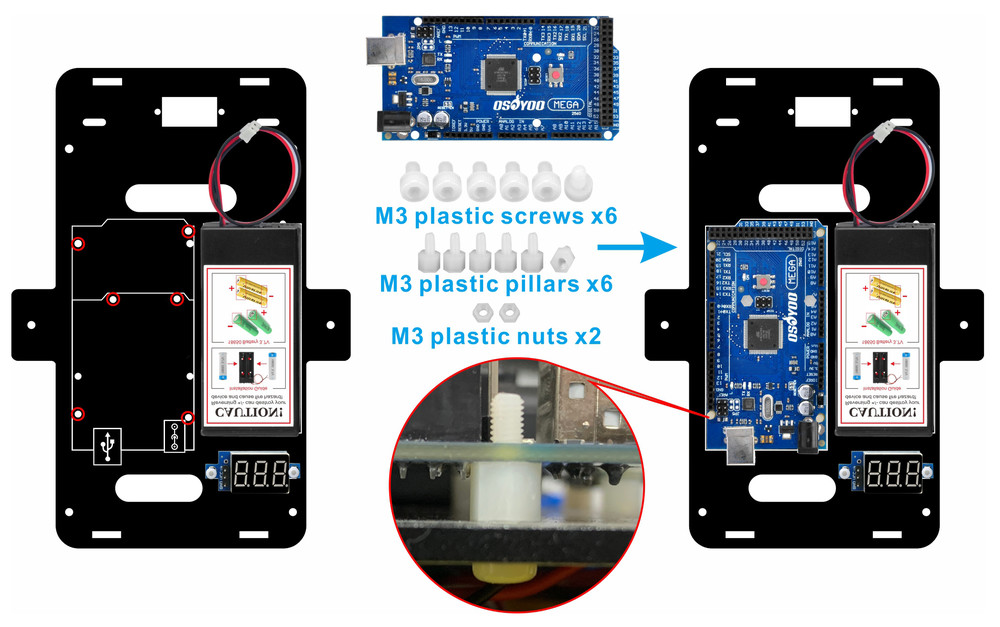
9)6本のM3プラスチックネジ、6本のM3プラスチック支柱、2個のM3プラスチックナットを使用して、OSOYOO Mega2560ボードを上部シャーシに固定します。(プラスチック支柱のオス端を上向きに取り付けることをお勧めします。)
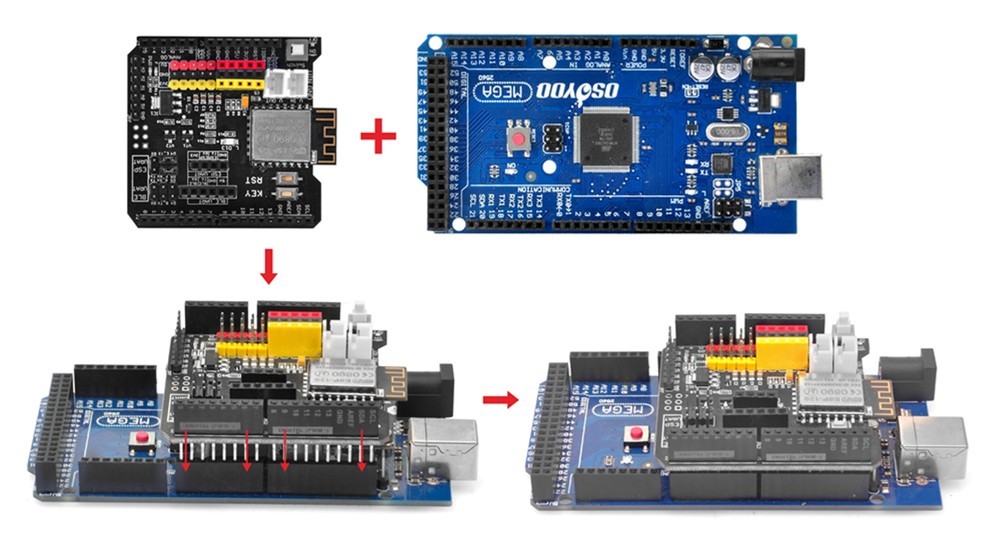
OSOYOO UART WiFiシールドをMega2560ボードに挿入します。適切に位置合わせされ、安定した通信インターフェースを確立するためにしっかりと接続されていることを確認してください。
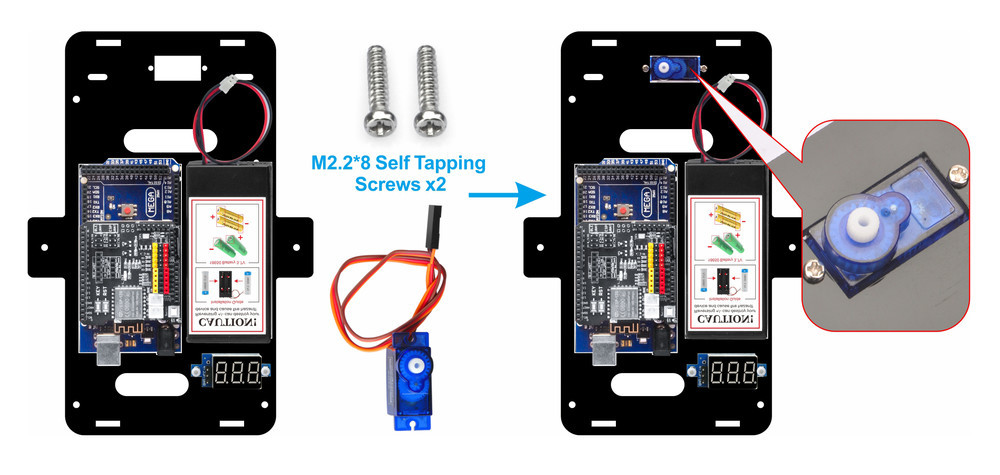
10)2本のM2.2*8セルフタッピングネジを使用して、サーボモーターを上部シャーシの前面に取り付けます。
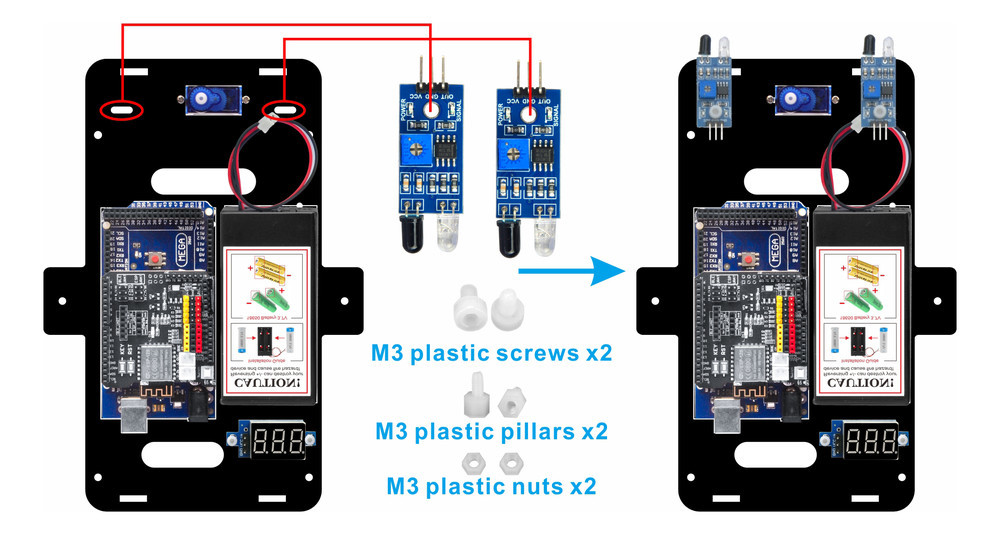
11)2本のM3プラスチックネジ、M3プラスチック支柱、M3プラスチックナットを使用して、2つのIR距離センサーを上部シャーシの前面に取り付けます。センサーをしっかりと固定するために、プラスチック支柱のオス端を上向きに取り付けることをお勧めします。
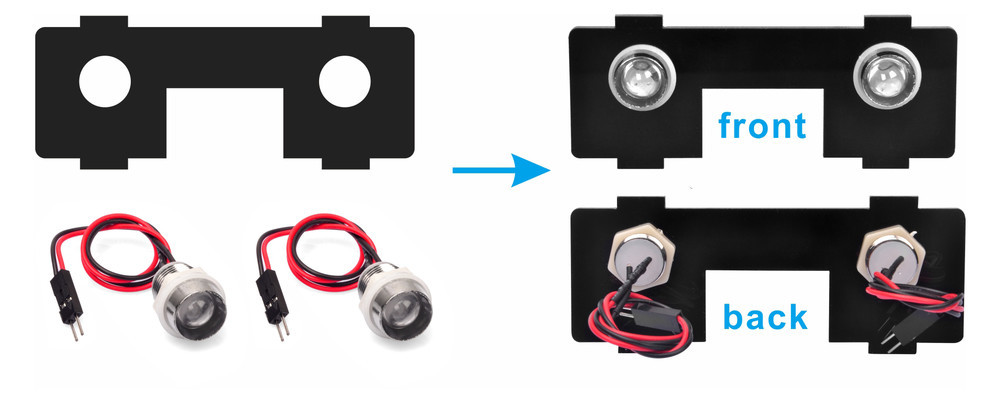
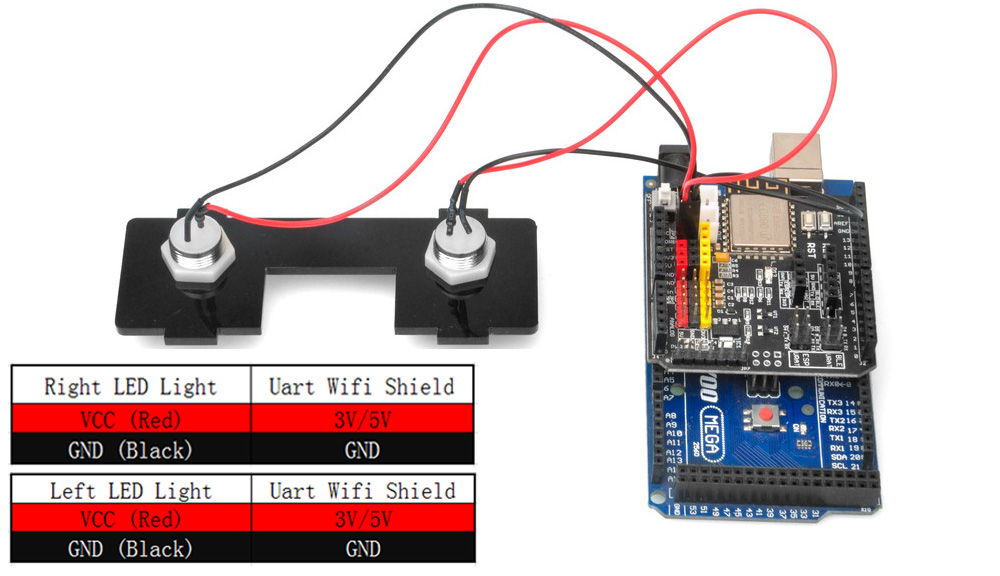
12)図に示すように、2つのLEDライトを前面バリアプレートに取り付けます。
13)上部と下部のシャーシを組み立てる前に、必要な回路接続がすべて完了していることを確認してください。
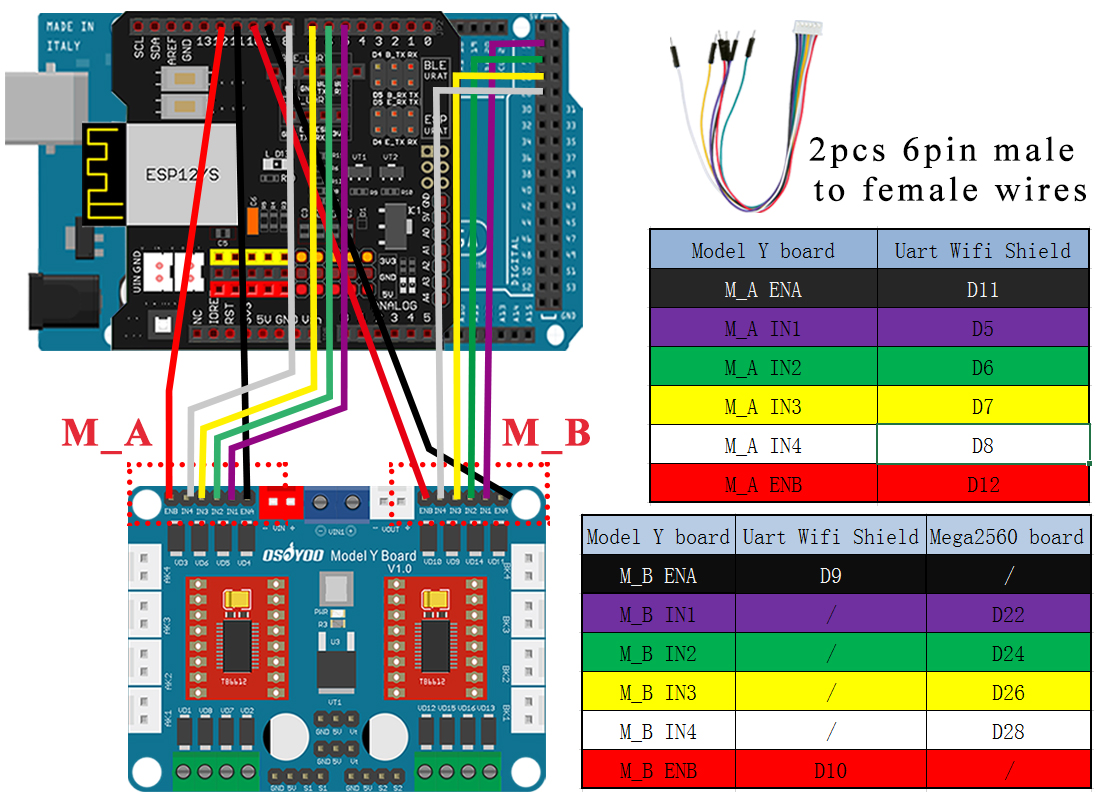
14)OSOYOOモデルYボードをUART WiFiボードに接続します。
図に示すように、2本の6ピンオス-メスジャンパーワイヤーを使用して、OSOYOOモデルYボードをUART WiFiシールドに接続します:
エリアM_Bの6ピンワイヤーをSG90サーボ近くの穴を通します。
エリアM_Aの6ピンワイヤーを電圧計近くの穴を通します。
注意:
この6ピンプラグをモデルYの6ピンオスソケットに挿入/取り外しする際は、プラスチックピンホルダーを持って操作してください。ワイヤーを引っ張ってプラグをソケットから抜かないでください。そうするとワイヤーが損傷します。
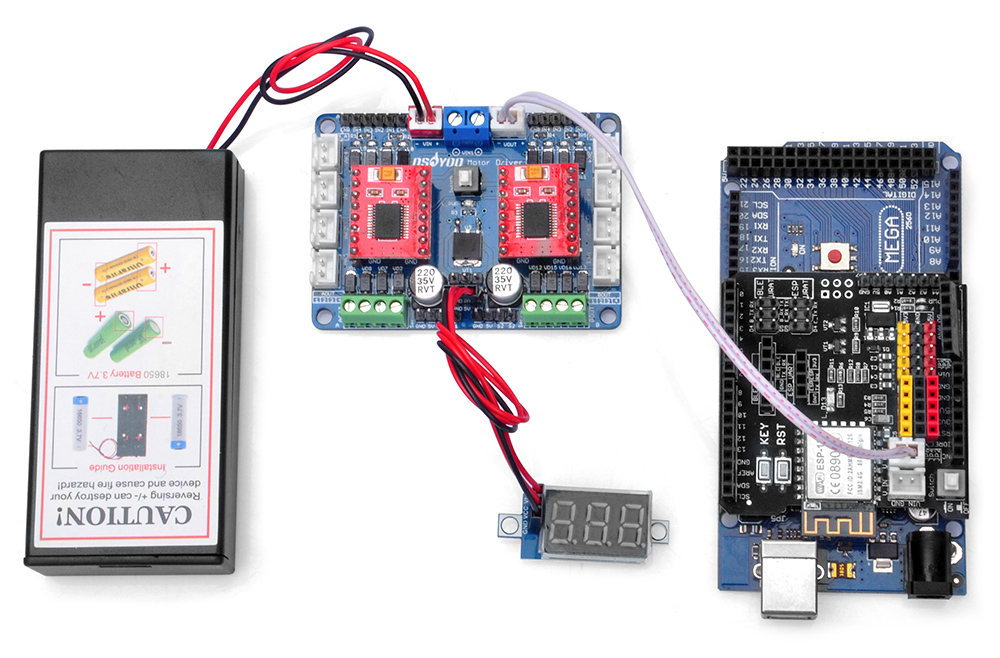
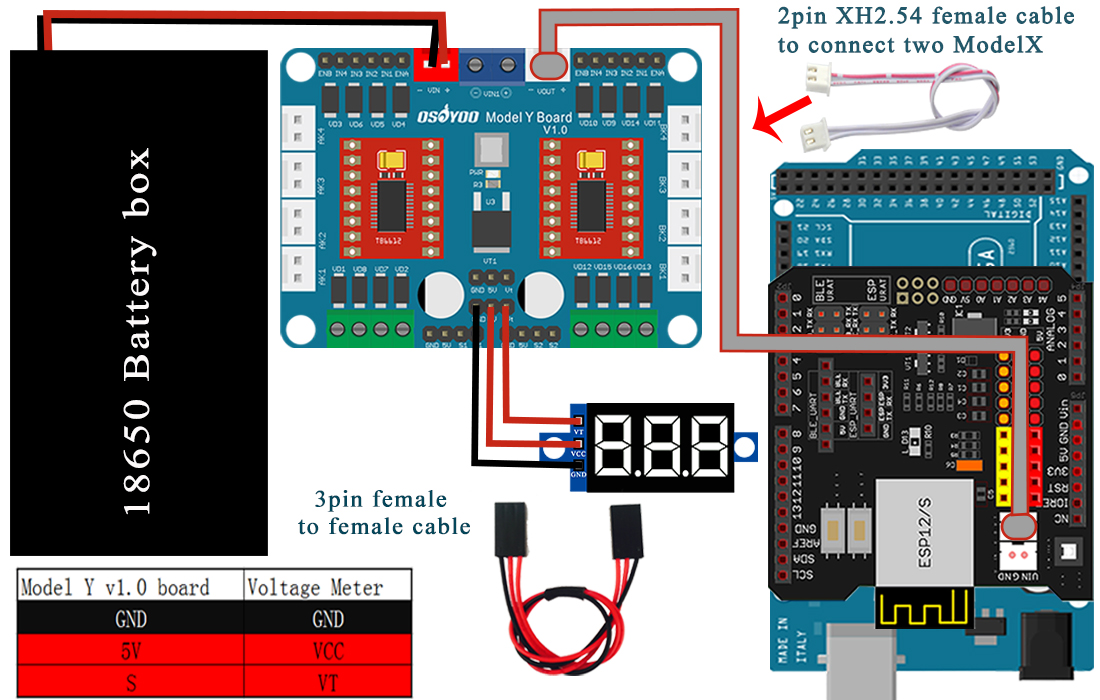
15)接続図に示すように、3ピンメス-メスジャンパーワイヤーを使用して電圧計をOSOYOOモデルYボードに接続します。
図に従って、バッテリーボックスをOSOYOOモデルYボードのVINソケットに接続します。
図に示すように、2ピンPnPケーブルを使用して、OSOYOOモデルYボードのVOUTソケットをWiFiシールドのVINソケットに接続します。
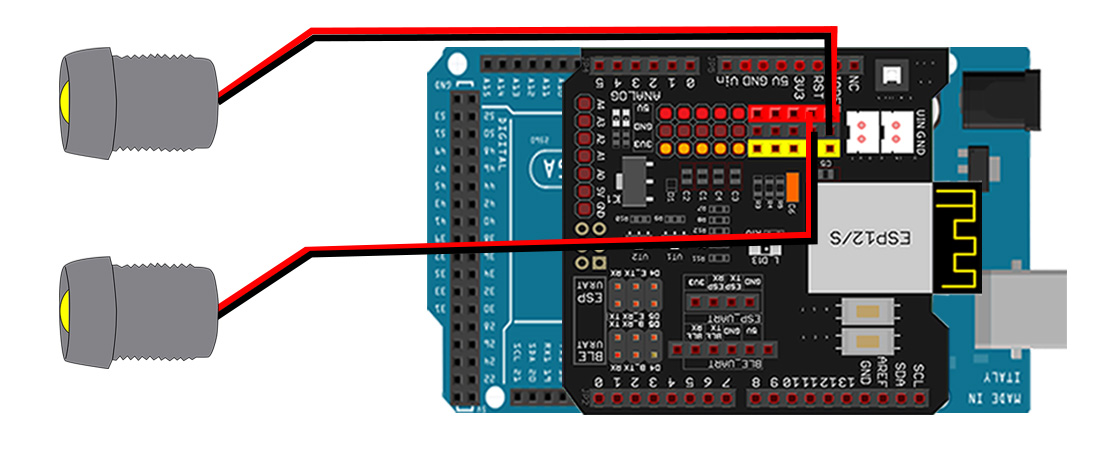
16)前面横隔膜に2つのLEDライトを取り付けます。
LEDライトの赤いワイヤー(VCC)を3Vまたは5Vピンに、黒いワイヤー(GND)をUART WiFiシールドのGNDピンに接続します。
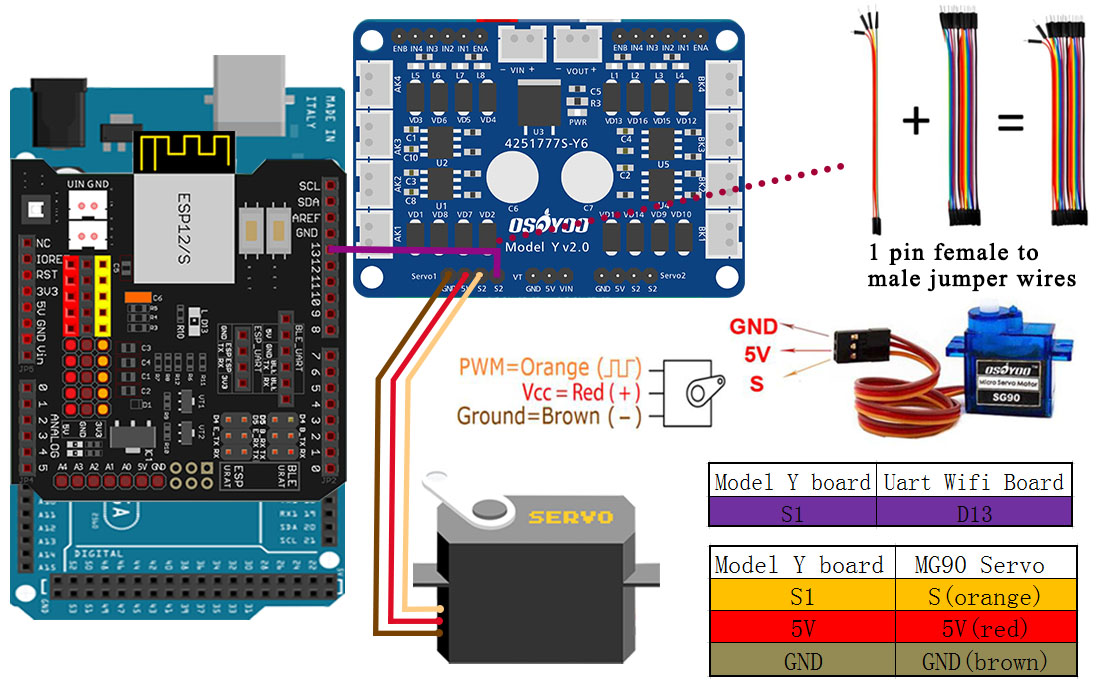
17)サーボモーターのオレンジワイヤー(PWM)をS、赤ワイヤー(VCC)を5V、茶ワイヤー(GND)をモデルYボードのGNDに接続します。
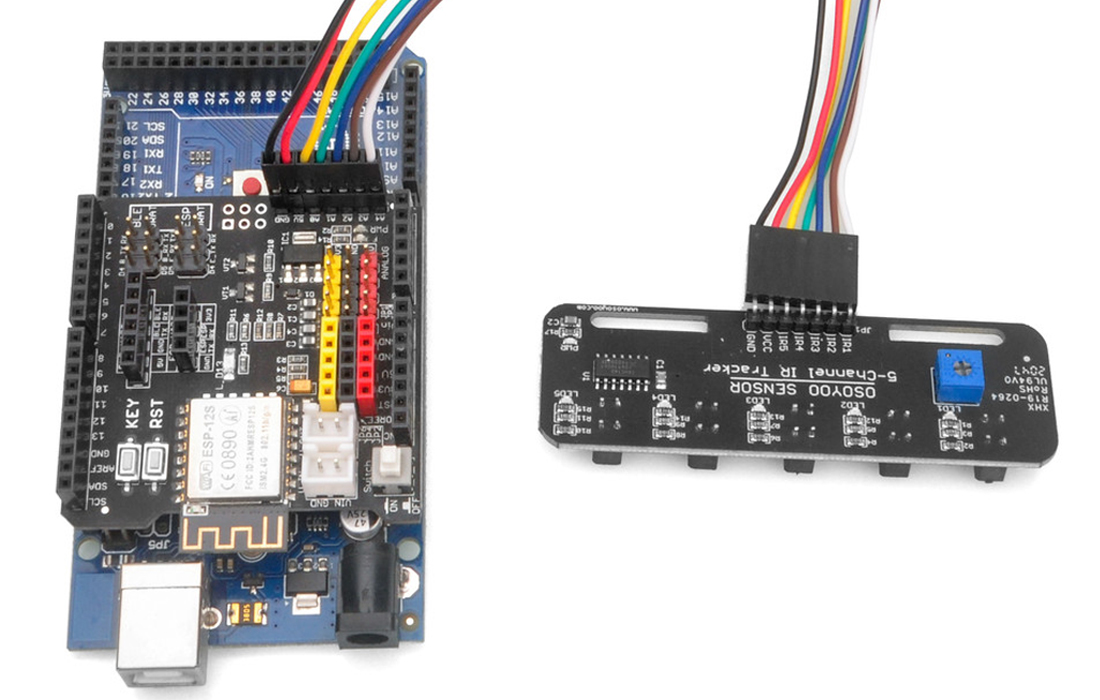
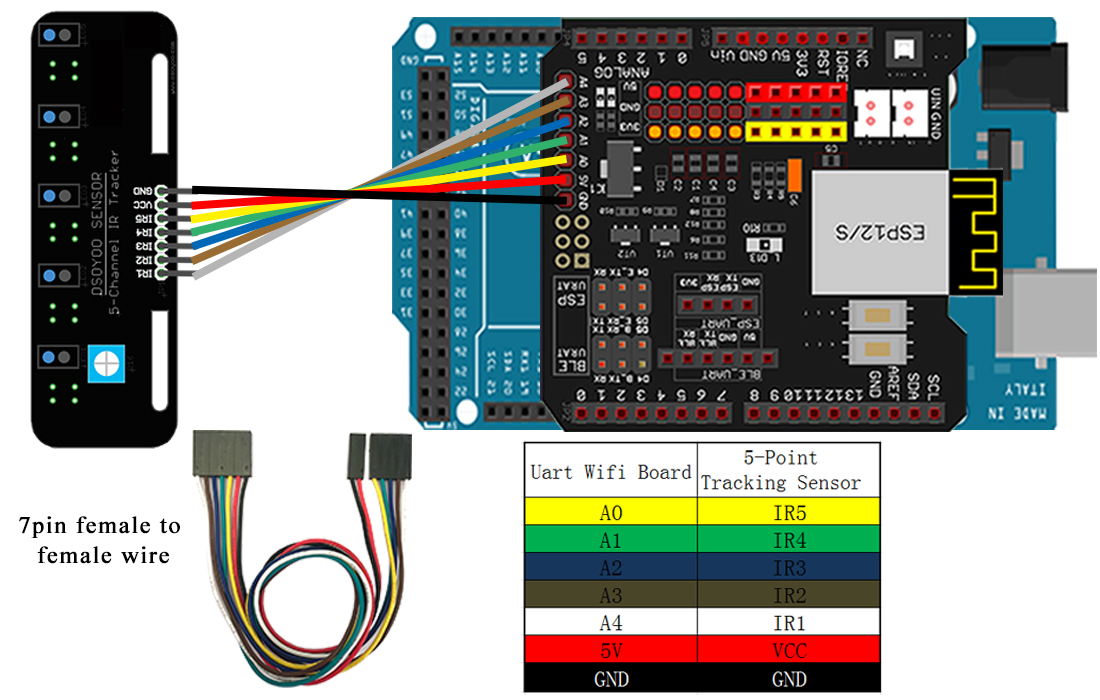
18)トラッキングセンサーモジュールのGND-VCCピンをOSOYOO Uart WiFiシールドV1.3のGND-5Vに接続し、以下の写真に示すように7ピン25cmメス-メスケーブルでIR1、IR2、IR3、IR4、IR5ピンをA4、A3、A2、A3、A1に接続します。
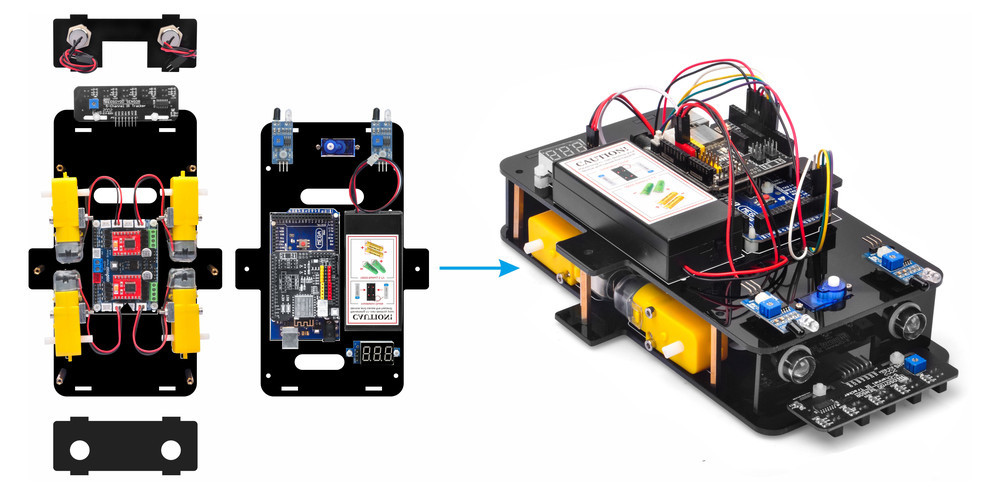
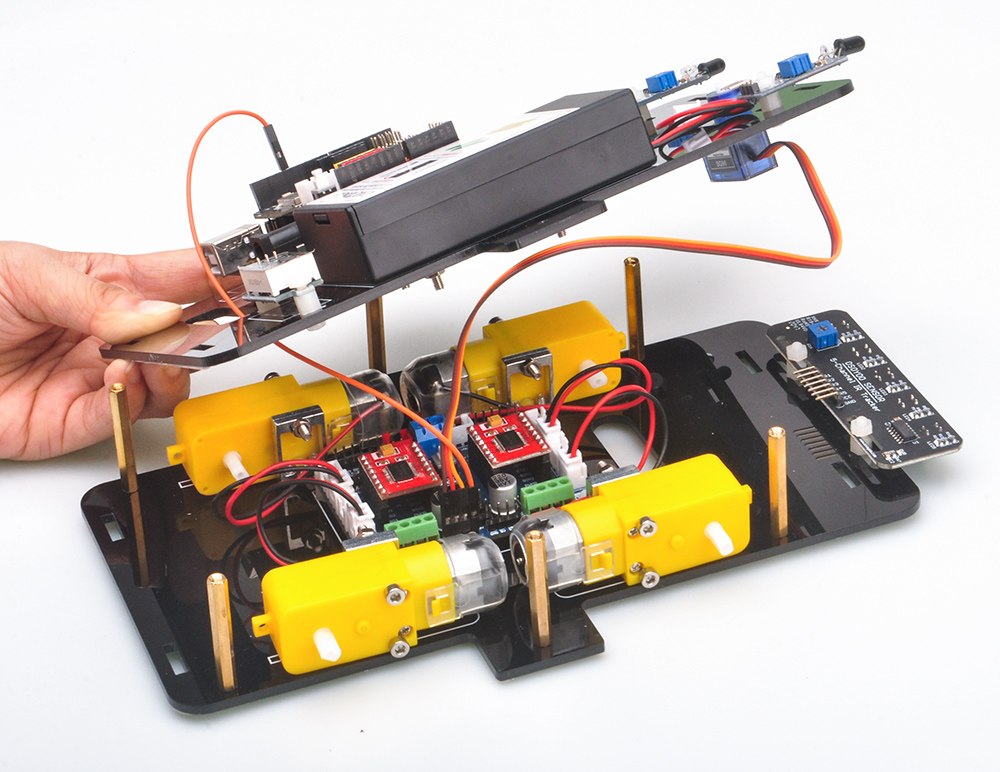
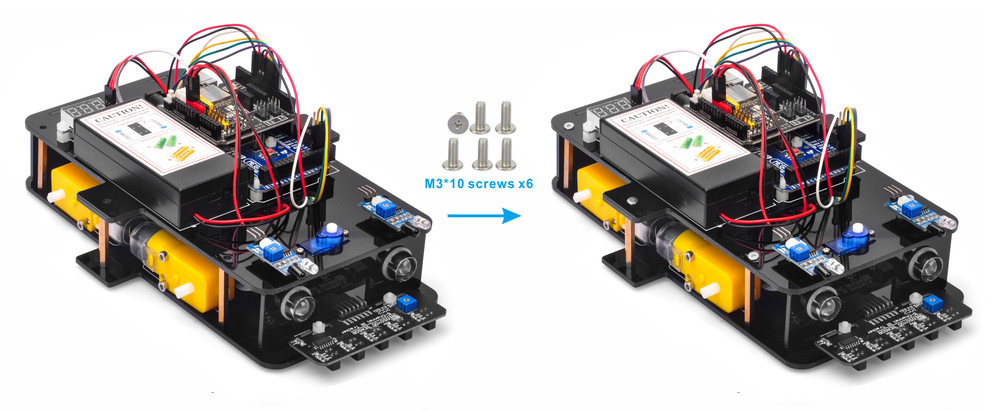
19)6個のM3*10六角ネジで上部シャーシを下部シャーシに固定します。
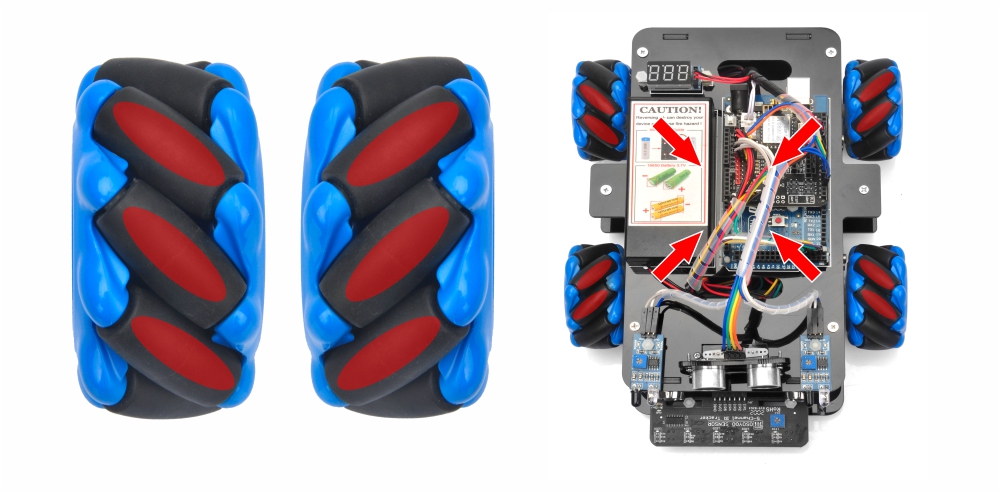
20)4個のM2.2×22ネジまたはM2.5X20ネジ或るいM2.6X20ネジで4つのホイールをモーターに取り付けます。
特別注意:一部のユーザーは、M2.2ネジが短すぎてホイールを車に固定できない場合があります。この場合は、OSOYOOサポート([email protected])に連絡して、無料の新しいM2.5×20ネジを依頼してください

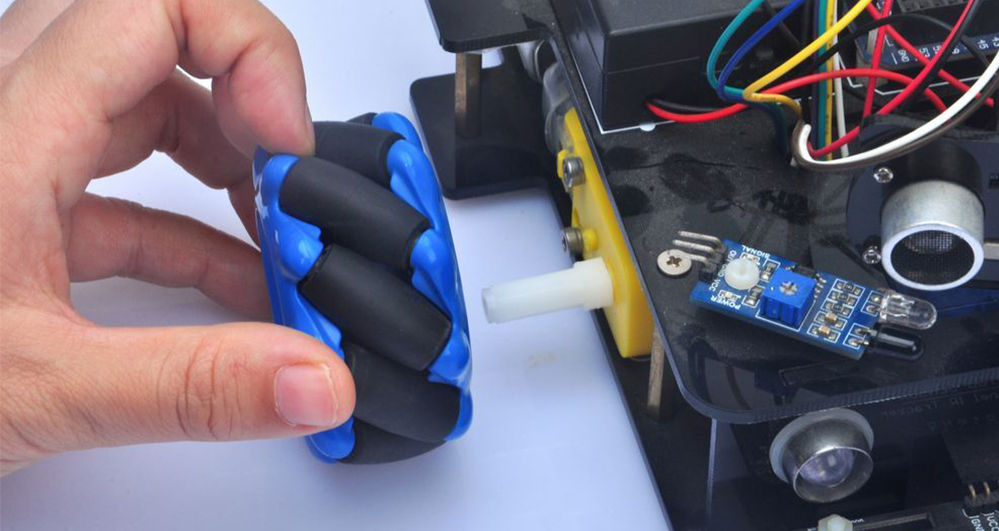

注意:2つのタイプがあり、上から見たときにローラーが車の中心を向くように配置してください。
これでハードウェアの取り付けはほぼ完了です。18650バッテリーをボックスに取り付ける前に、まずサンプルコードをArduinoに書き込む必要があります。

ステップ1:最新のArduino IDEをインストールします(Arduino IDEのバージョンが1.1.16以降の場合は、このステップをスキップしてください)。https://www.arduino.cc/en/Main/Software?setlang=en からArduino IDEをダウンロードし、ソフトウェアをインストールします。
ステップ2:https://osoyoo.com/driver/mecanum_acrylic_chassis_v2/mc-lesson1.zip をダウンロードし、ダウンロードしたzipファイルmc-lesson1.zipを解凍すると、mc-lesson1というフォルダが表示されます。
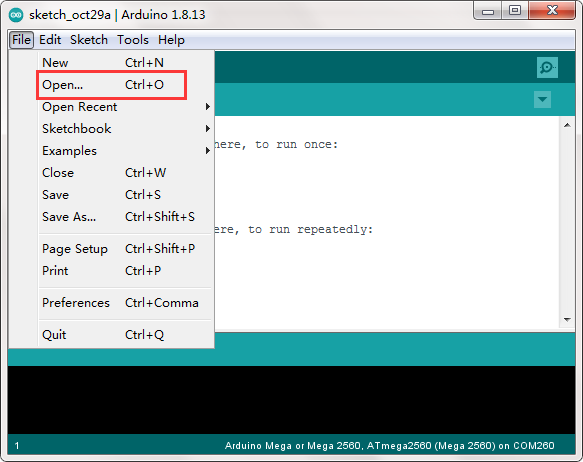
ステップ3:USBケーブルでMega2560ボードをPCに接続し、Arduino IDEを開き、ファイル→開く→lesson1フォルダ内のコード「mc-lesson1.ino」を選択し、コードをArduinoにロードします。
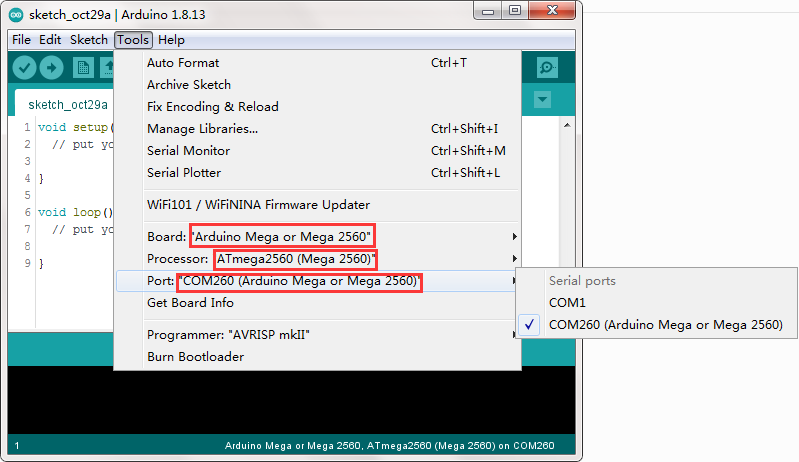
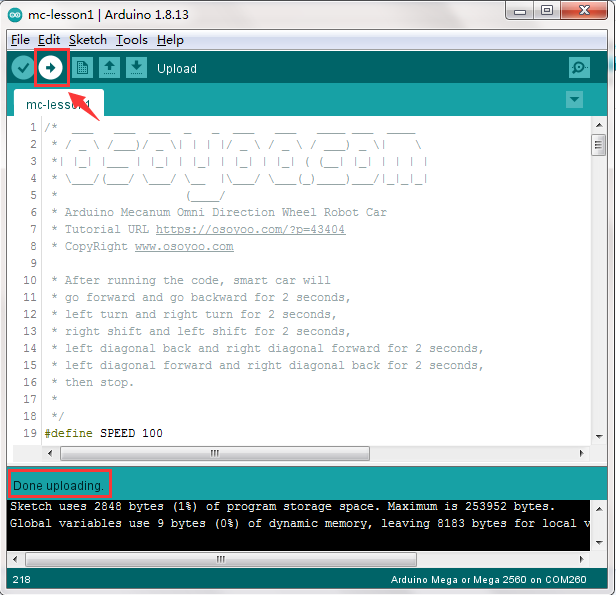
ステップ4:プロジェクトに対応するボード/ポートを選択し、スケッチをボードにアップロードします。
注意:
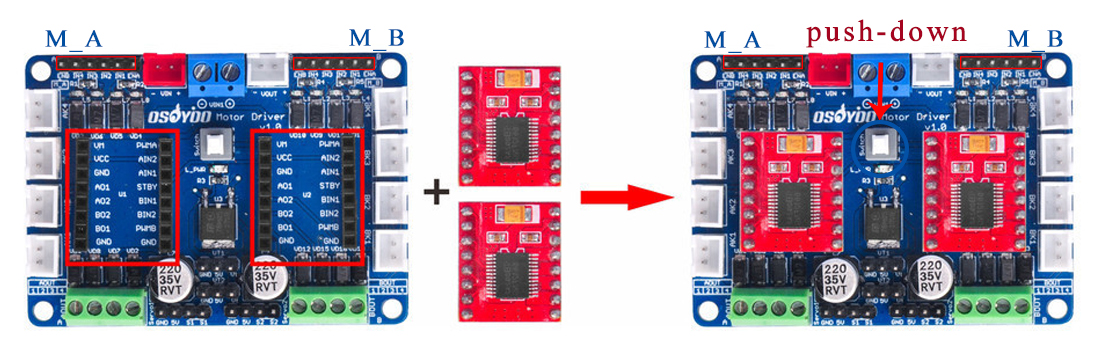
USB経由で給電すると車が正常に動作するが(例:地面から持ち上げると車輪が回転する)、USBを抜いてバッテリーを正しく挿入しても動作しない場合は、ダブルドライバーYボードのスイッチを確認してください。誤って上向きに切り替わっている可能性があります。車を分解せずにドライバーで押し下げてください。

最終設定:
ArduinoをPCから外し、バッテリーをバッテリーボックスに挿入します。車を地面に置き、OSOYOO UART WiFiシールドV1.3と18650バッテリーボックス(取り付けられている場合)の両方のスイッチをオンにします。
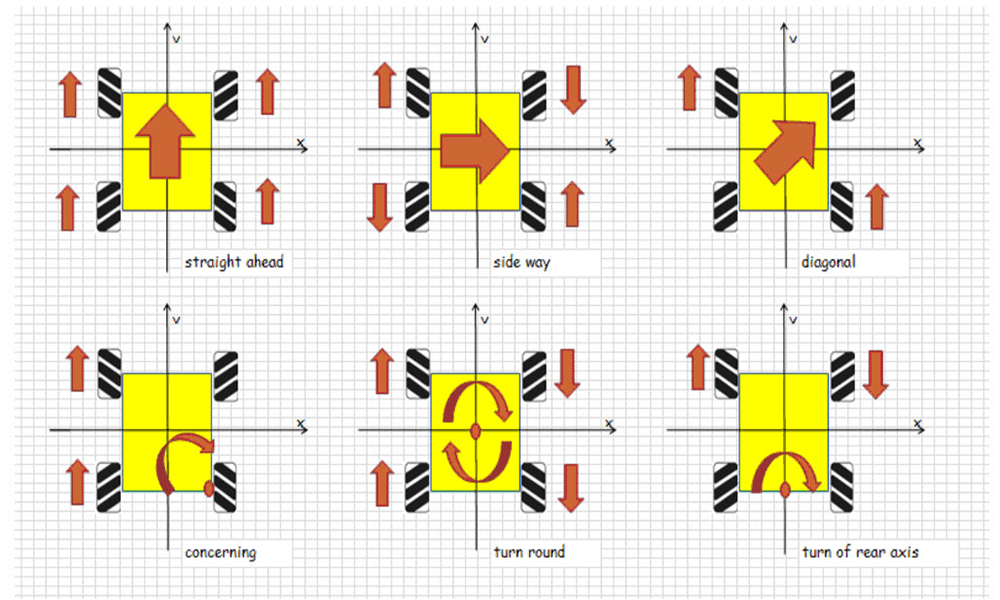
車は以下のシーケンスを実行するはずです:
前進 → 後退 → 左折 → 右折 →
右平行移動 → 左平行移動 →
左下斜め → 右上斜め →
左上斜め → 右下斜め、そして停止。












Thank You.