オンライン正規代理店:
電池付き:
| 米国から購入 |
英国から購入 |
ドイツから購入 |
イタリアから購入 |
フランスから購入 |
スペインから購入 |
日本から購入 |
 |
 |
 |
 |
 |
 |
 |
電池なし:
| Buy from USA |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
日本から購入 |
|
|
|
|
|
|
|
目的
このレッスンを続ける前にレッスン4を終えておかなければなりません。超音波モジュールを使って障害物を「見て」、そこまでの距離を測定します。距離があらかじめ車に設定された値よりも小さい場合にブザーが鳴り、車は自動的に障害物から向きを変えて回避します。
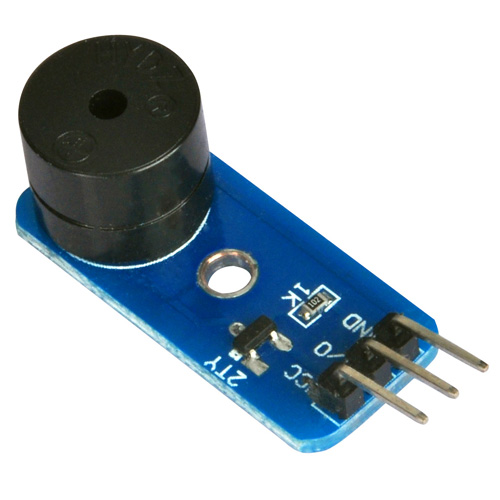
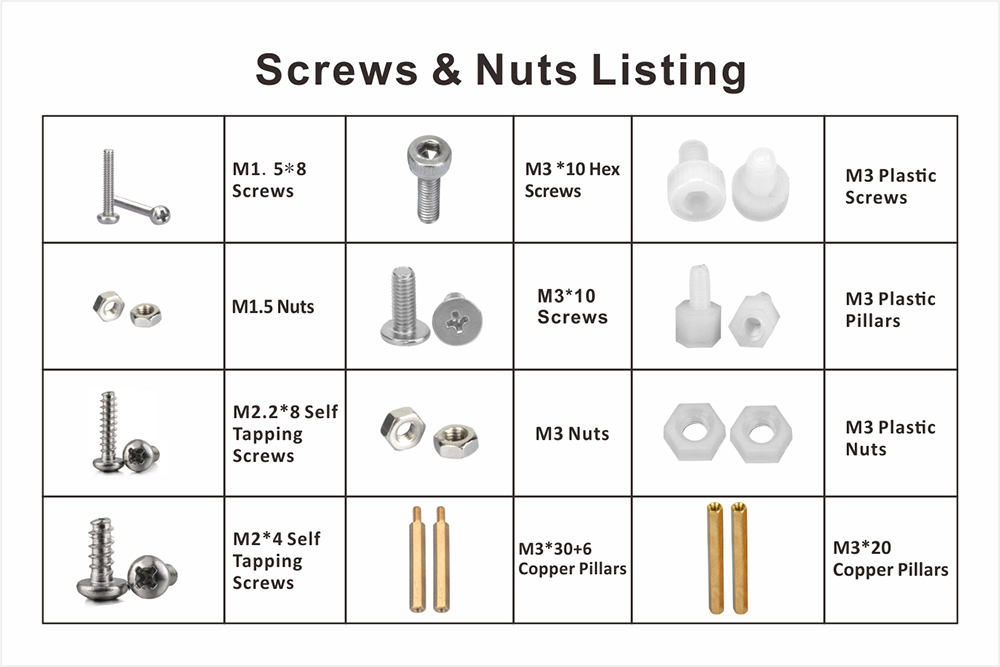
部品とデバイス:
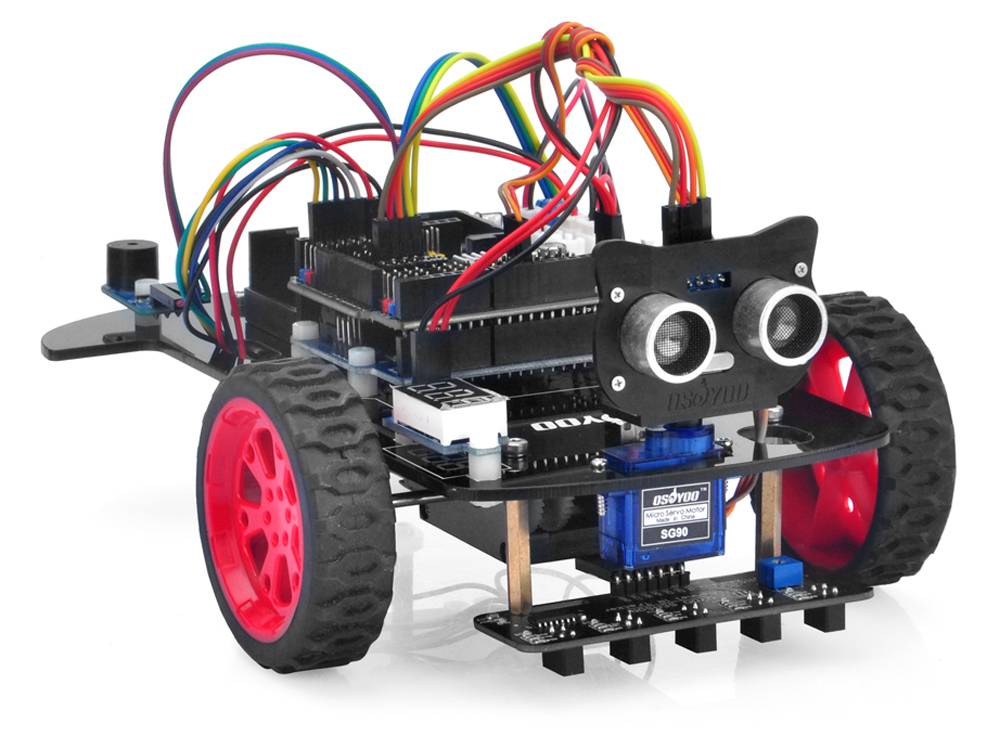
ハードウェアのインストール
レッスン4のに従い基本フレームワークをインストールします。もしレッスン4組み立て作業が完了していれば、そのままにしておきます
ソフトウェアのインストール:
ステップ1:最新のアルドゥイーノIDEをインストールします(アルドゥイーノIDEのバージョンが1.1.16以降の場合は、このステップをスキップしてください)
アルドゥイーノIDE
をここからhttps://www.arduino.cc/en/Main/Software?setlang=en ダウンロードして、ソフトウェアをインストールします。
ステップ2: Lesson5の サンプルコードをダウンロードして、そのダウンロードしたzipファイルlesson5.zipを解凍すると、lesson5というフォルダができます。
ステップ3:アルドゥイーノUNOをPCにUSBケーブルで接続します、アルドゥイーノIDEを開く→「ファイル」クリック→「開く」クリック→lesson5フォルダ内のコード “lesson5.ino “を選択し、コードをアルドゥイーノに読み込む。(注意 スケッチコードをアルドゥイーノにアップロードする際は、バッテリーのスイッチを切るか、電源アダプタのプラグを抜いてください。

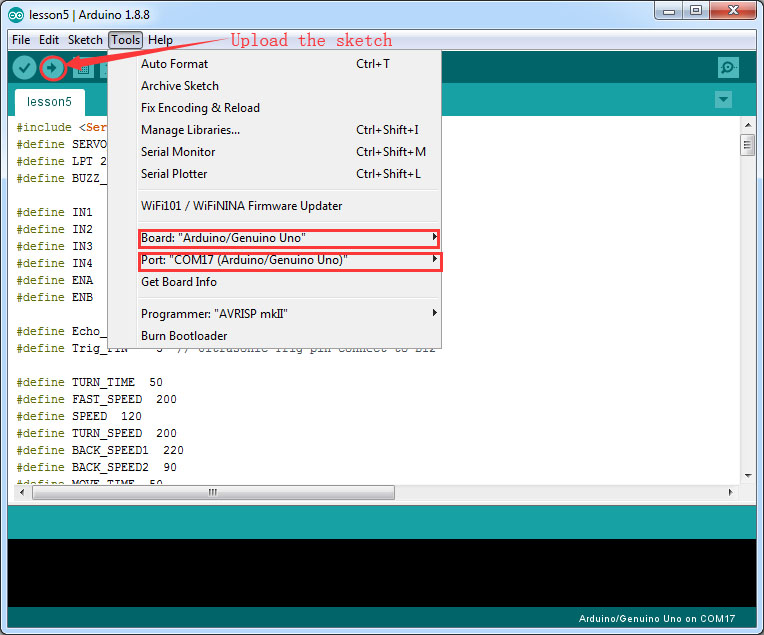
ステップ4: IDEの「ツール」を開き プロジェクトに対応するボード/シリアルポートを選択して、スケッチをボードにアップロードします。
ステップ5:超音波センサーのサーボモータ初期方向調整
車の電源を入れた後、長いビープ音が聞こえ、次にサーボが動き始めだして、最後にある方向で5秒間停止しますので。
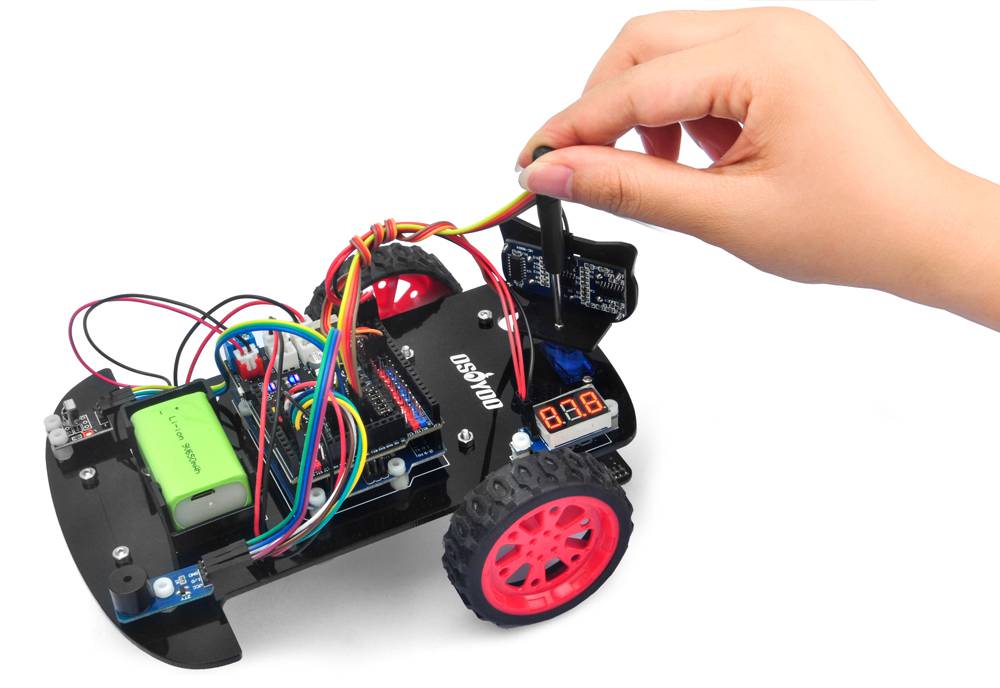
その最初の5秒間に超音波センサー(2つ目)の方向が正面にいることを確かめなければなりません。
もしまっすぐ前を向いていない場合は、すぐに車の電源を切り、サーボからセンサーを取り外して、次の写真の様に取り付け位置をまっすぐ前を向く様にして再度取り付けます。そうしないと、障害物回避プログラムが正しく動作しません。
センサーの方向調整を行った後、再び車の電源をONにします。長いビープ音が聞こえた後、写真の様にセンサーは前方方向でなければなりません。もし方向が真正面ではないとき、車の電源を切り、再び方向の調整を行います。
テスト
車の電源をONにして、もし超音波センサーモジュールが回転して正面を向いていれば、もうセンサー位置の調整をする必要はありません。
5秒待って、障害物がないと検知したら、車は前進します。
もし何か障害物を検知したら、車は停止して、超音波モジュールが
右から左へ旋回して周りの障害物を検知します、そしてロボットカーは障害物回避センサーのデーターと回避アルゴリズムに従い
左折、右折,後進するか決めてます。
には、車が衝突して超音波センサーの位置が変わってしまうことがあります、その場合は、リンク先の「超音波センサーサーボの初期方向調整」に従って、センサーの方向調整を再度行うことを忘れないでください。