In dieser Lektion nutzen wir unser Raspberry Pi Roboterauto, um automatisch eine schwarzen Linie auf weißem Grund abzufahren. Zum Erkennen der Linie nutzen wir einen 5-Punkte IR-Spurfolge-Sensor. Bitte sieh Dir neben dem Tutorial-Text auf jeden Fall auch das Erklär-Video an – viele kleine Tipps und Tricks kannst Du Dir dort einfach abschauen.
Nr.
Abbildung
Baugruppe
Anzahl
Zubehör
Link
1
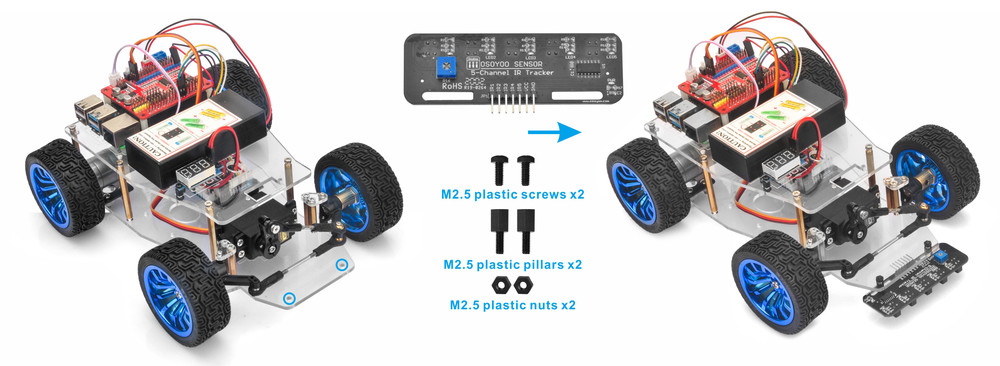
Spurfolge-Sensor
1
M2.5 Kunststoffschraube x 2
M2.5 Kunststoffmutter x2
M2.5 Kunststoffbolzen x 2
Schritt 2: Befestige den Spurfolge-Sensor unter dem unteren Chassis mit 2 Kunststoffschrauben M2.5, Kunststoffbolzen M2.5 und Kunststoffmuttern M2.5.
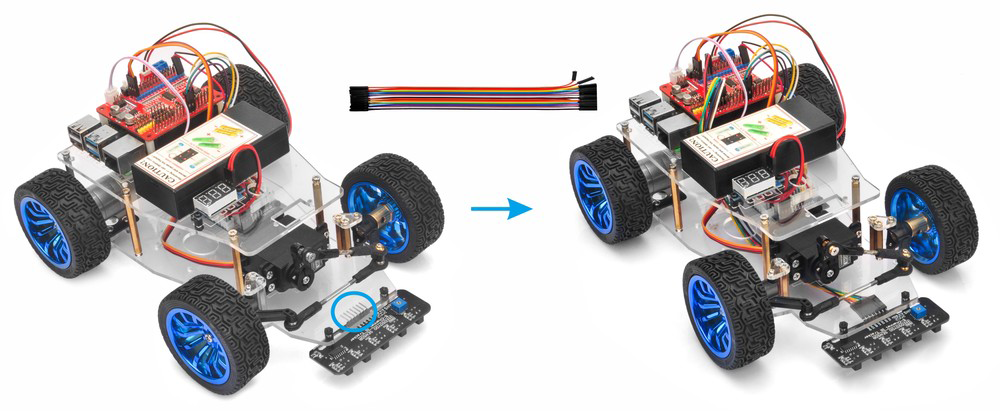
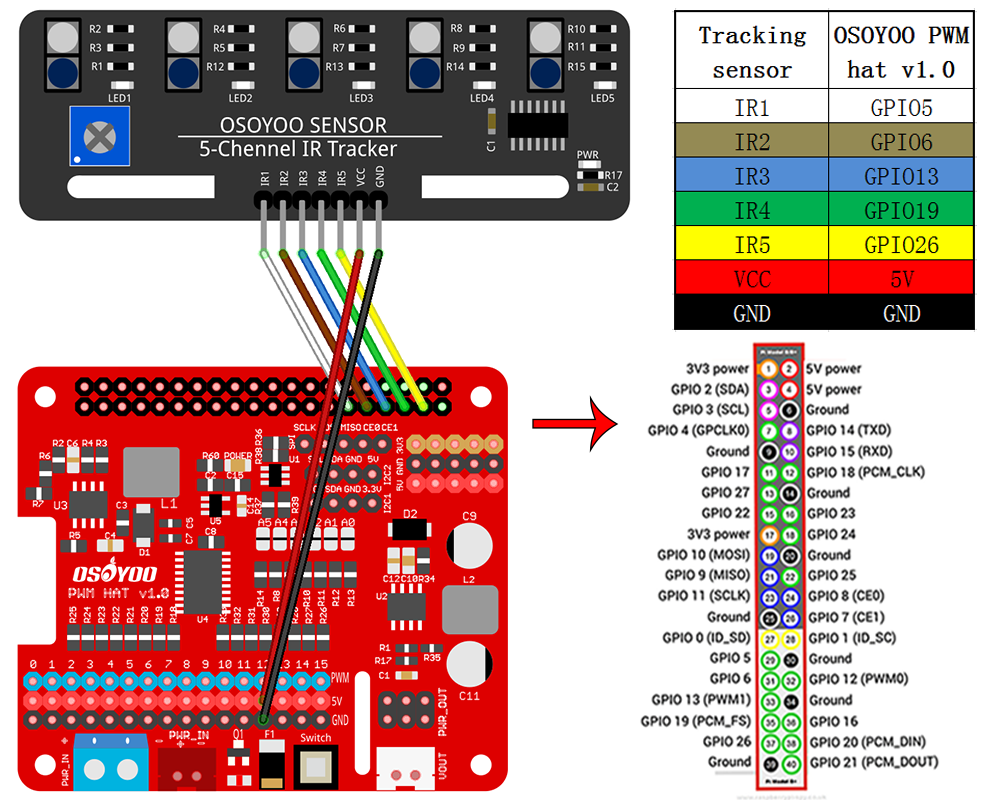
Schritt 1: Verbinde die GND und VCC Pins des Spurfolge-Sensors mit GND und 5V des OSOYOO PWM HAT Boards; verbinde die Pins IR1, IR2, IR3, IR4, IR5 über das 7pin 25cm Female to Female Kabel mit den Raspberry Pi Pins GPIO5, GPIO6, GPIO13, GPIO19, GPIO26 wie auf dem Bild gezeigt (Hinweis: Entferne keine bereits in Lektion 1 installierte Drähte).
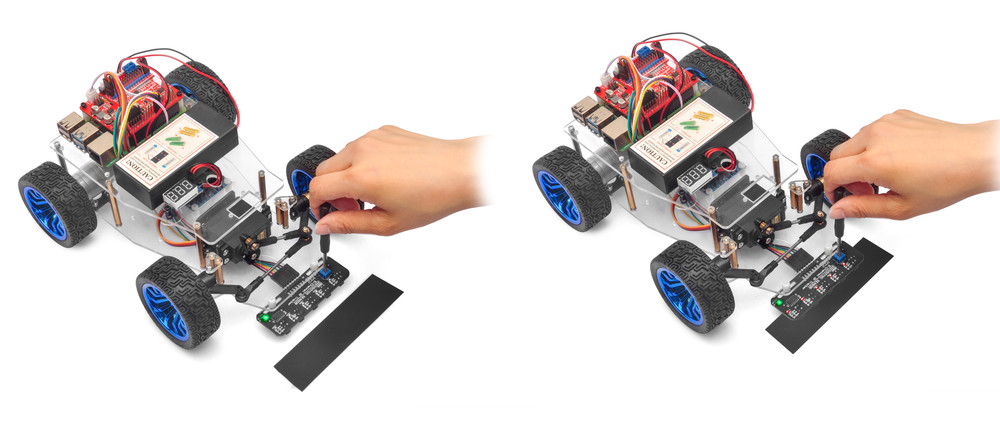
Schritt 2: Stelle die Empfindlichkeit des Spurfolge-Sensors ein.
Schalte das Auto ein und stelle mit dem Potentiometer auf dem Spurfolge-Sensor die Empfindlichkeit für beste Ergebnisse ein: die LED leuchten, wenn der zugehörende IR-Sensor über der schwarzen Spur ist und sind dunkel, wenn der IR-Sensor über weißem Untergrund ist.
Lade den Python Code durch Eingabe des folgenden Kommandos in Dein Raspberry Pi Terminal:
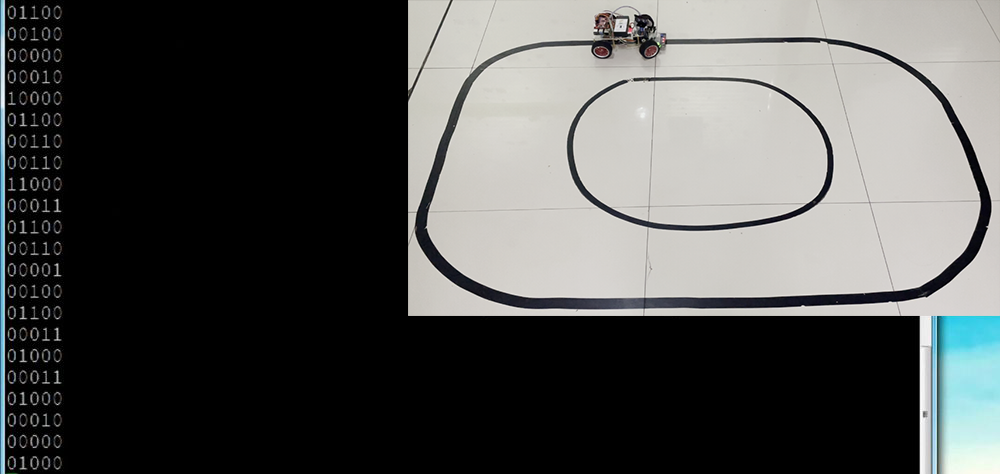
Schalte die Batterie Deines Autos ein und setze das Auto auf die schwarze Linie:
Jetzt kannst Du über Eingabe des folgenden Kommandos das Spurfolge Python Programm starten: