In diesem Projekt verwenden wir zwei Fotowiderstandssensoren, um ein einfaches Lichtfolger-Roboterauto zu entwerfen. Mit einer Taschenlampe, die auf die Fotowiderstandsmodule scheint, folgt das Roboterauto dem Licht, um sich vorwärts zu bewegen, das Licht zu drehen oder nach links abzubiegen, genau wie eine niedliche Katze, die mit dem Licht spielt. Die Fotowiderstandsmodule bestehen aus Sensoren an der Vorderseite des Fahrzeugs; Sie können es so programmieren, dass es dem stärkeren Licht folgt.
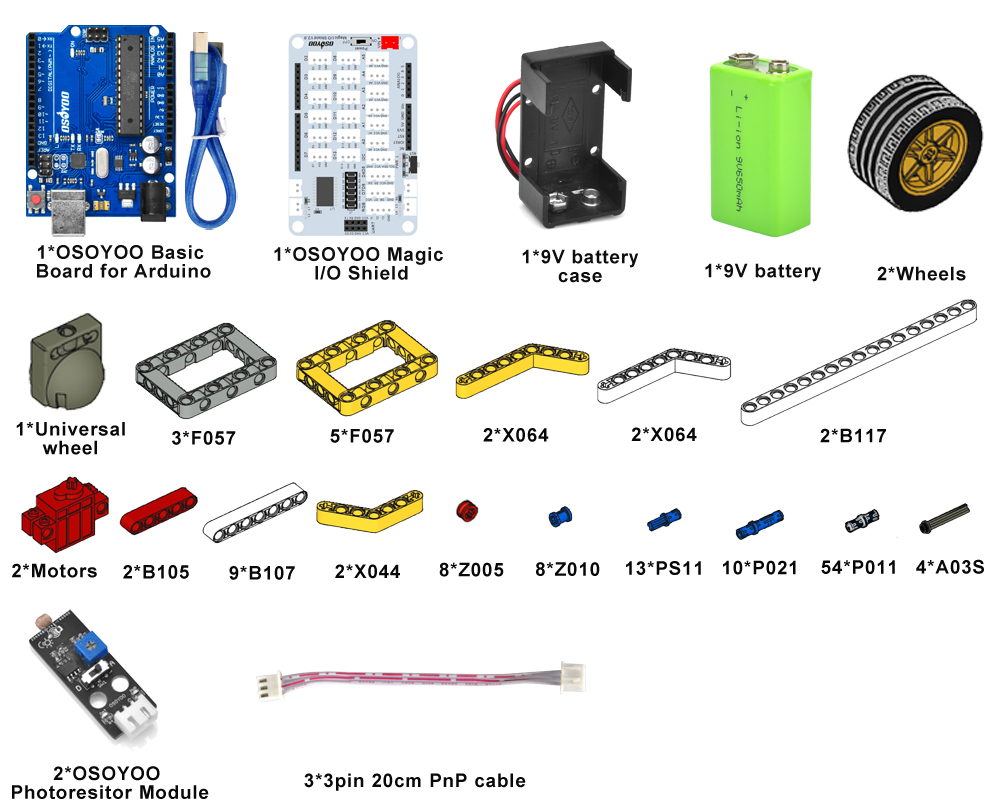
Bitte bereiten Sie die folgenden Teile vor, um dieses Projekt abzuschließen HINWEIS:
1. Die Farbe des Bausteins unterliegt dem tatsächlichen Produkt, was die Verwendung nicht beeinflusst.
2. ALLE OSOYOO-PRODUKTE FÜR ARDUINO SIND BOARDS VON DRITTANBIETERN, DIE VOLLSTÄNDIG MIT ARDUINO KOMPATIBEL SIND.
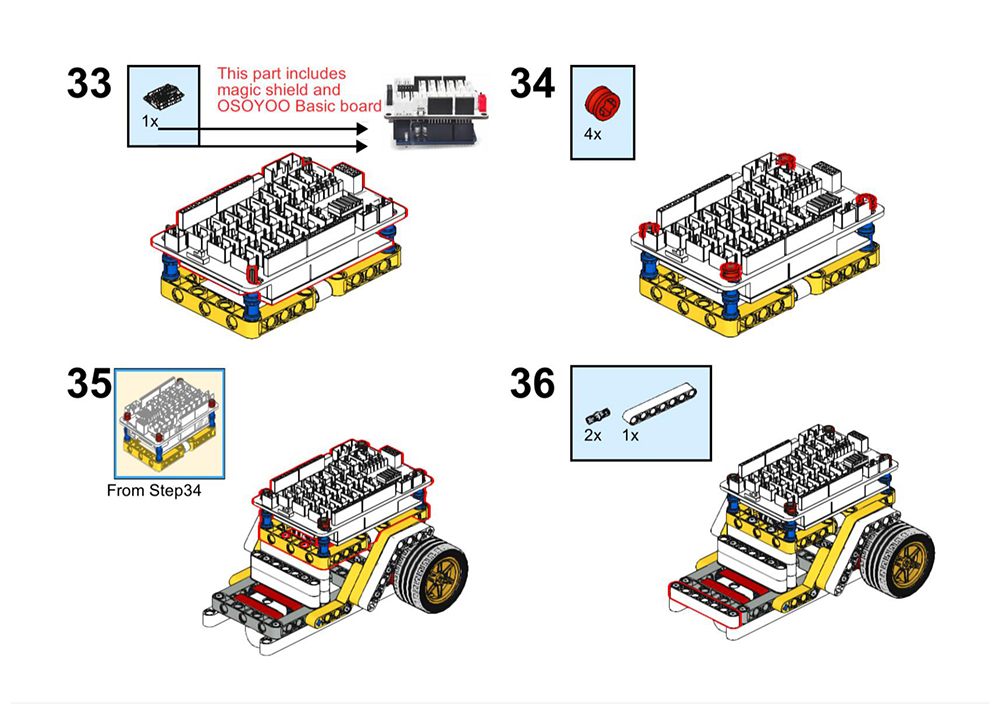
Bevor Sie den Roboter mit Blöcken bauen, installieren Sie bitte das OSOYOO-Basisboard für Arduino unter dem OSOYOO Magic I / O-Shield wie folgt(Achtung bitte: Die Pins des I / O-Shields sind zuerst mit dem Port des Basisboards ausgerichtet, dann drücken Sie das Shield fest auf das Board).
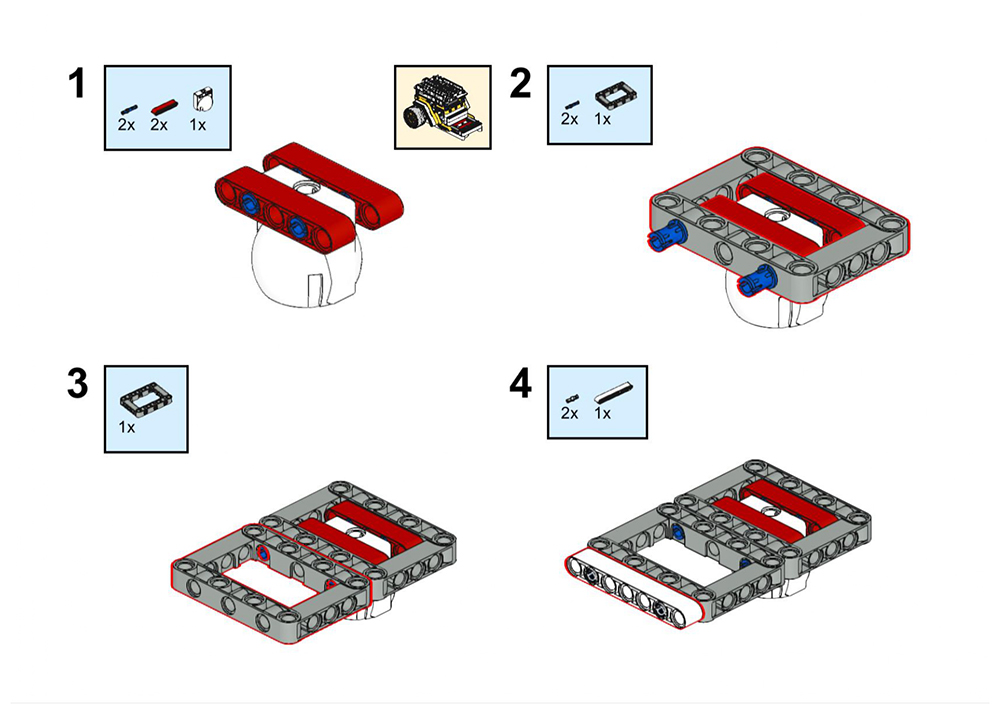
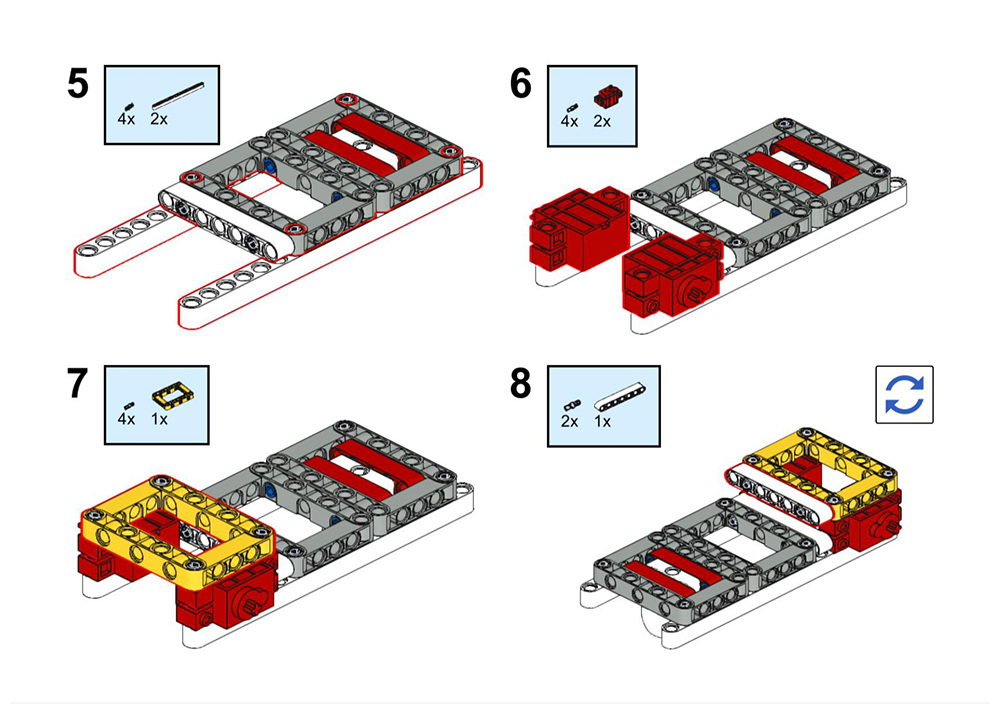
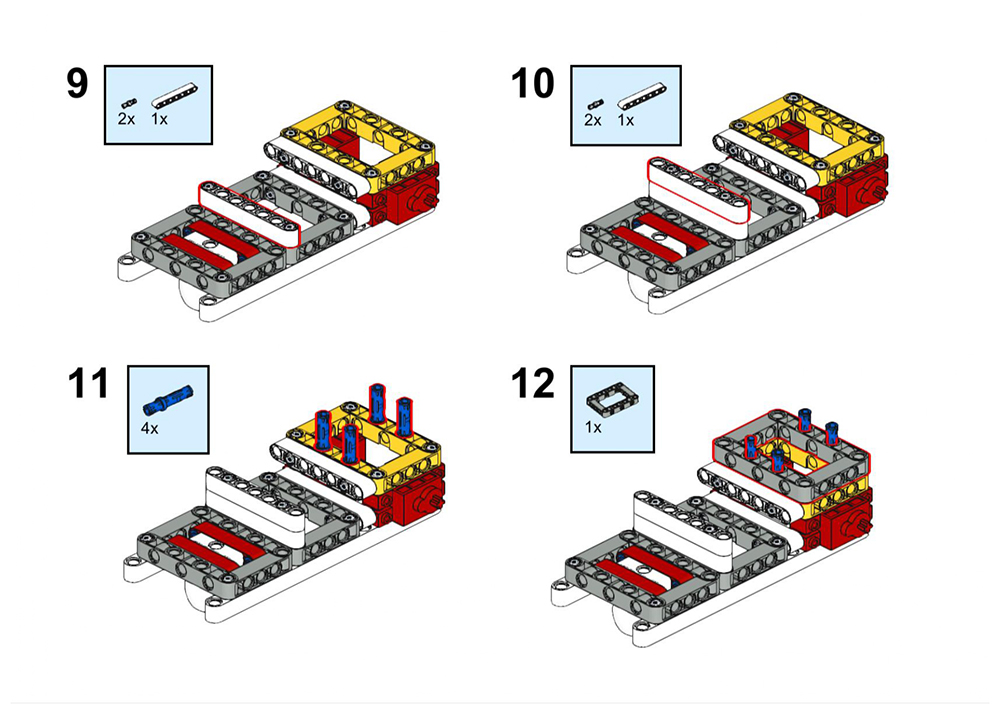
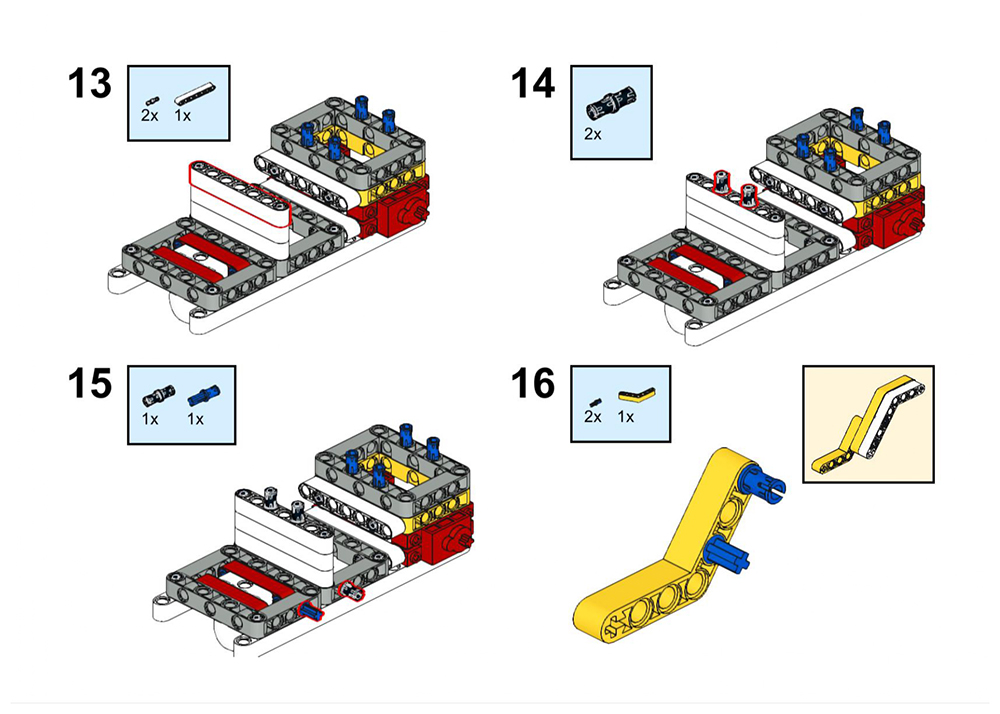
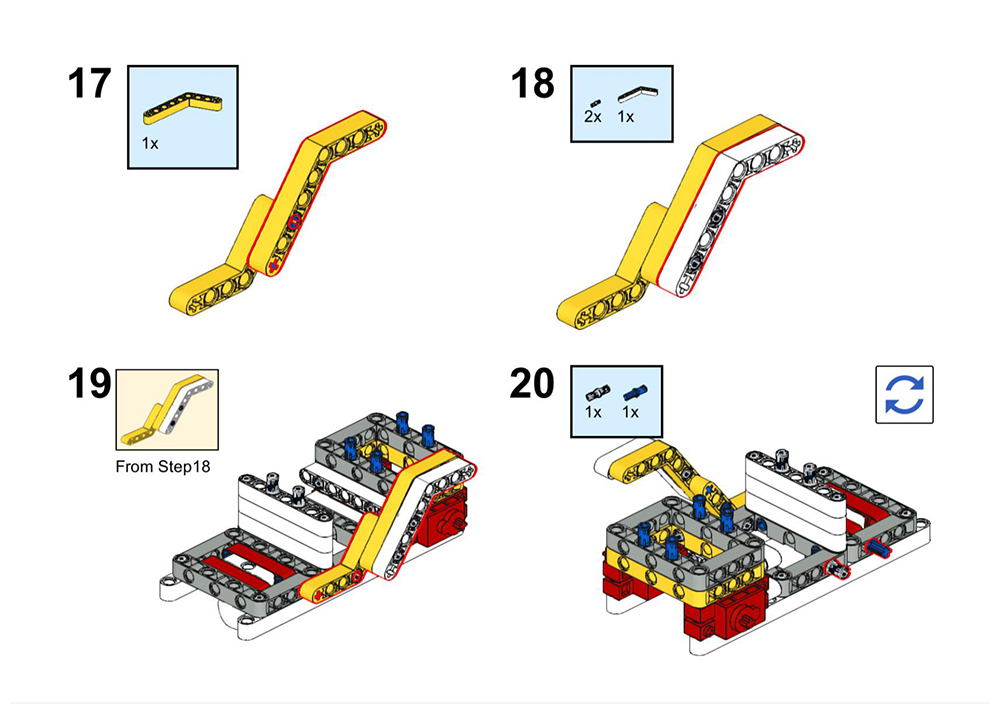
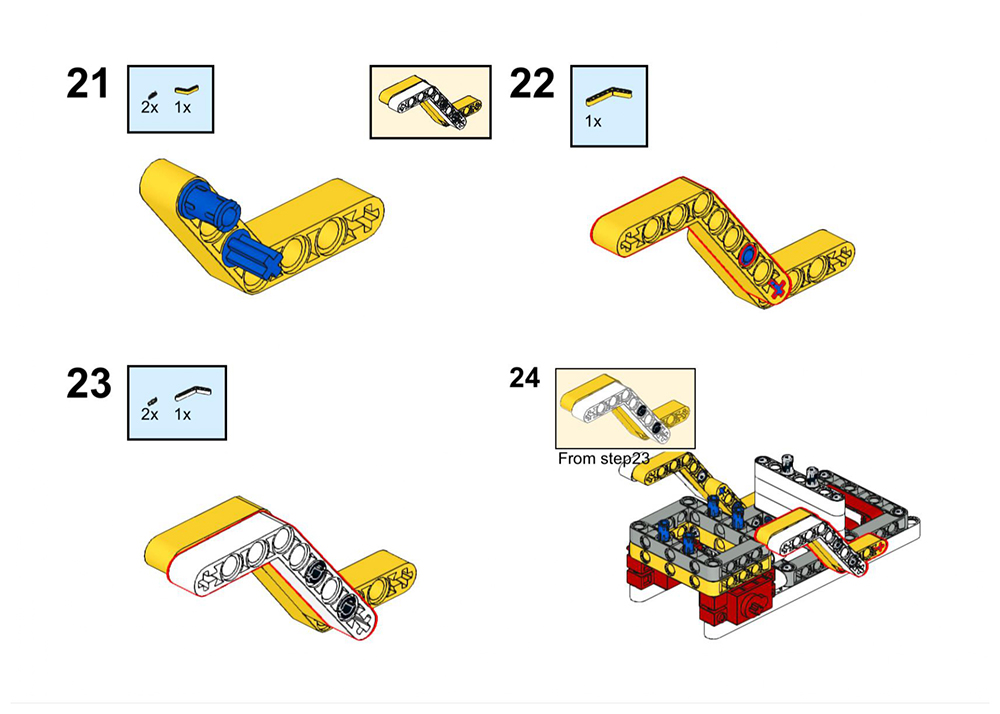
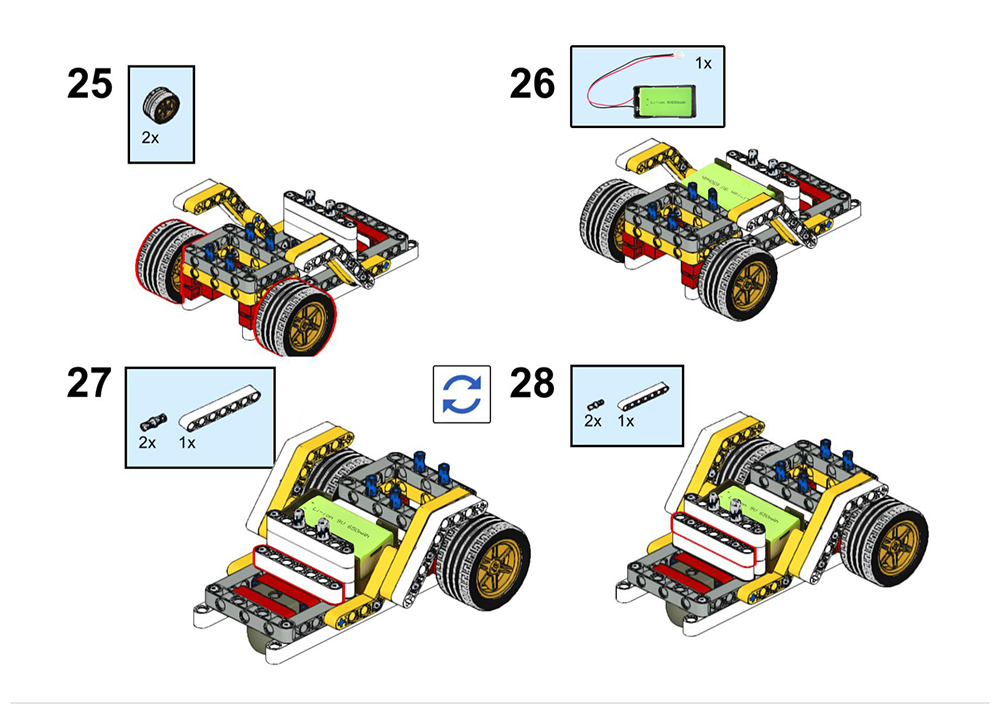
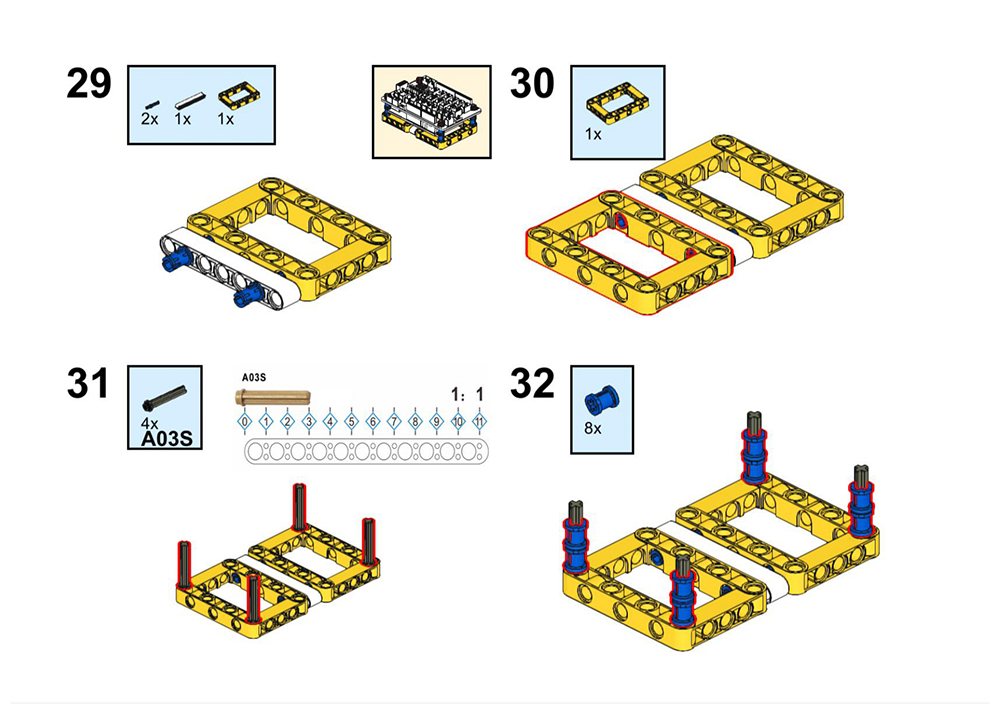
Bitte folgen Sie den Bauschritten, um dieses Roboterauto zu bauen. Wenn Sie klare PDF-Bauschritte erhalten möchten, laden Sie sie bitte von https://osoyoo.com/picture/Building_Robot_Car/lesson3/LESSON3.pdf herunter
Hinweis: Wenn Sie das Roboterauto für Lektion1 gebaut haben, fahren Sie bitte mit Schritt 35 in dieser PDF-Datei fort.
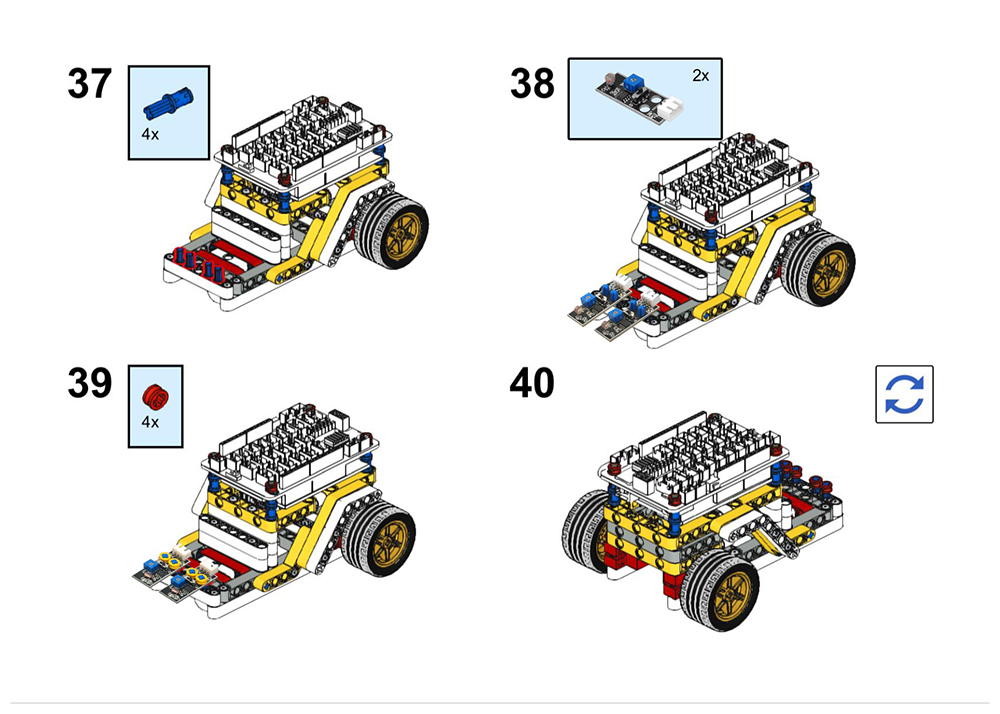
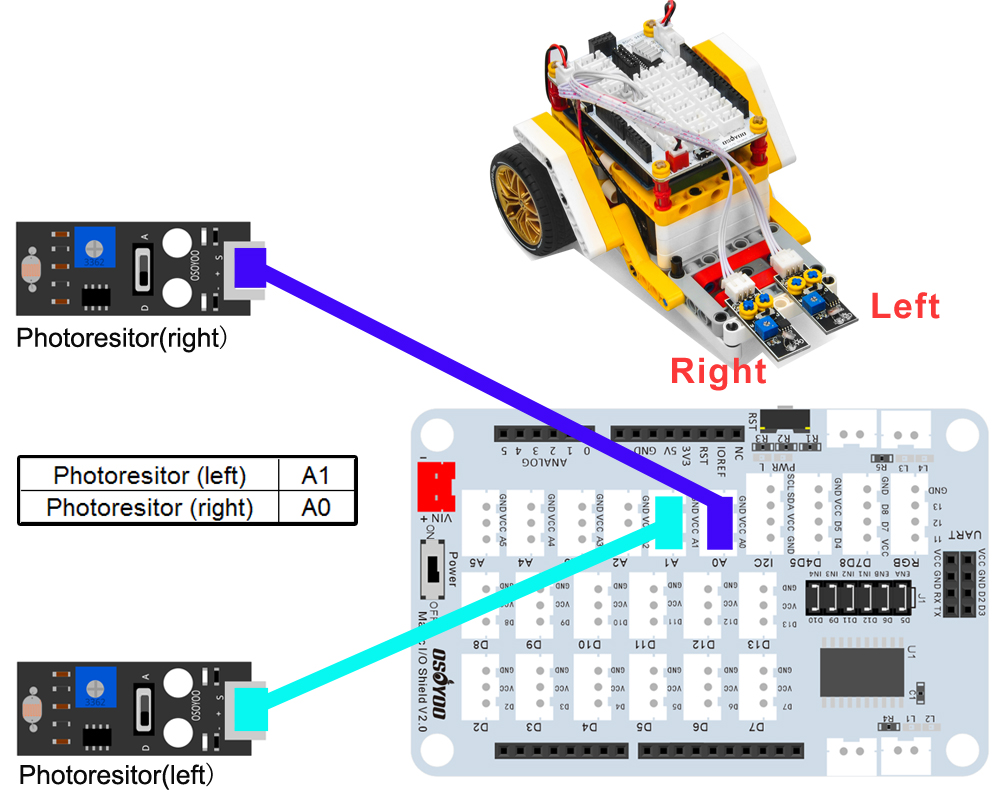
Bitte schließen Sie Motoren und 9-V-Batteriefach als Lektion an1. Verbinden Sie dann den linken Fotowiderstand mit A1 des Magic I/O-Shiels, rechts mit dem A0-Port mit 3-poligen PNP-Kabeln wie folgt (Achtung bitte: Es gibt sechs Überbrückungskappen an ENA/ENB/IN1/IN2/IN3/IN4):
Schritt 3) Führen Sie die mBlock PC-Software aus, indem Sie auf das schöne Panda-Symbol doppelklicken. Sie sehen die mBlock-Benutzeroberfläche wie in der folgenden Abbildung. Bitte löschen Sie das Standardgerät CyberPi, indem Sie auf das Kreuz im roten Kreis klicken
Schritt 4) Ziehen Sie osoyoo_uno_mext Datei (heruntergeladen in Schritt 2) wie folgt in die mBlock-Software:
Nun sehen Sie eine neue Geräte-Firmware in mBlock, siehe folgendes Bild:
Jetzt wurden die mBlock-Software und OSOYOO_UNO Geräte-Firmware erfolgreich auf unserem PC installiert!
Jetzt zeigen wir Ihnen, wie Sie Blöcke verwenden, um die obige Idee in die Realität umzusetzen.
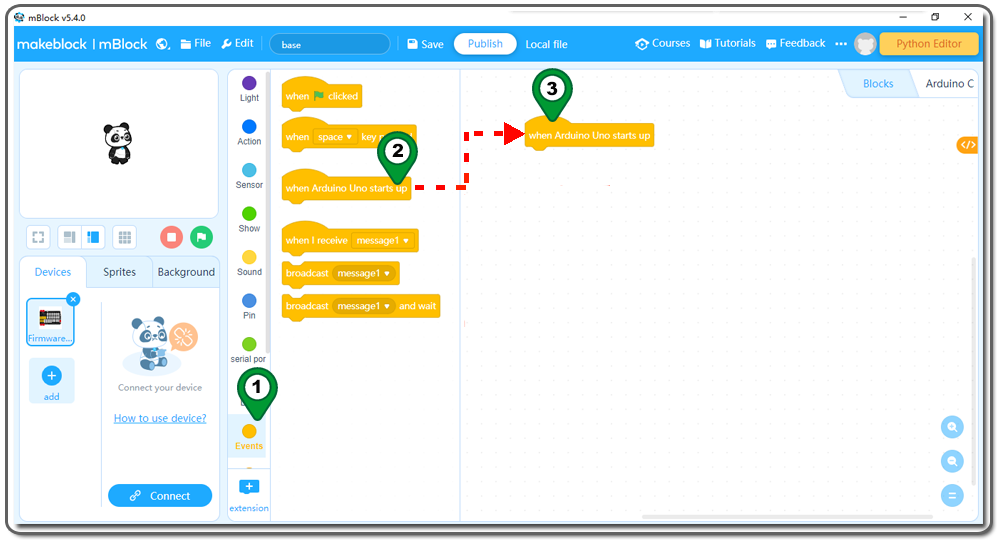
Schritt 5)Klicken Sie auf Events,, fügen Sie oben den Block when Arduino Uno starts up hinzu:
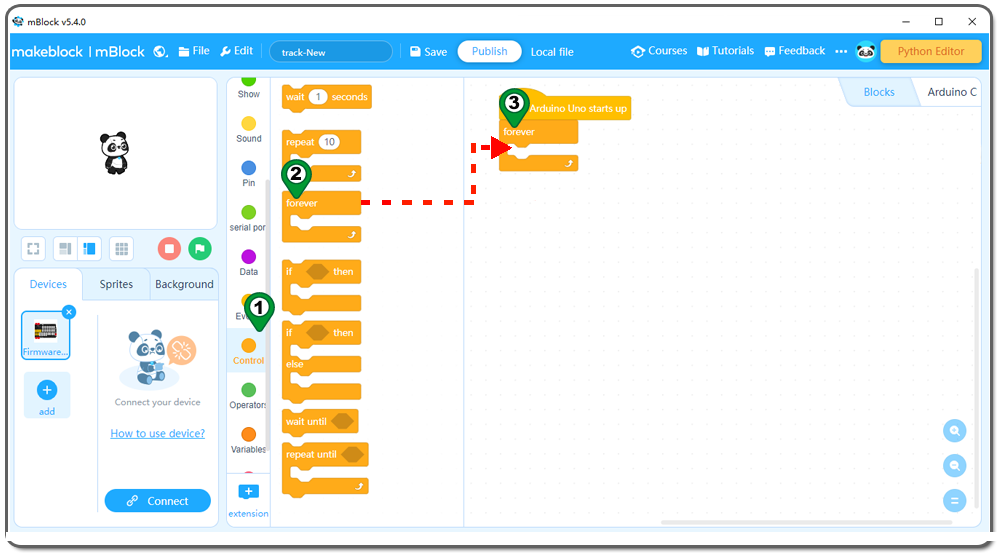
Schritt 6): Klicken Sie auf Control, dann ziehen Sie den Block Forever in den Programmierbereich und legen ihn dort ab:
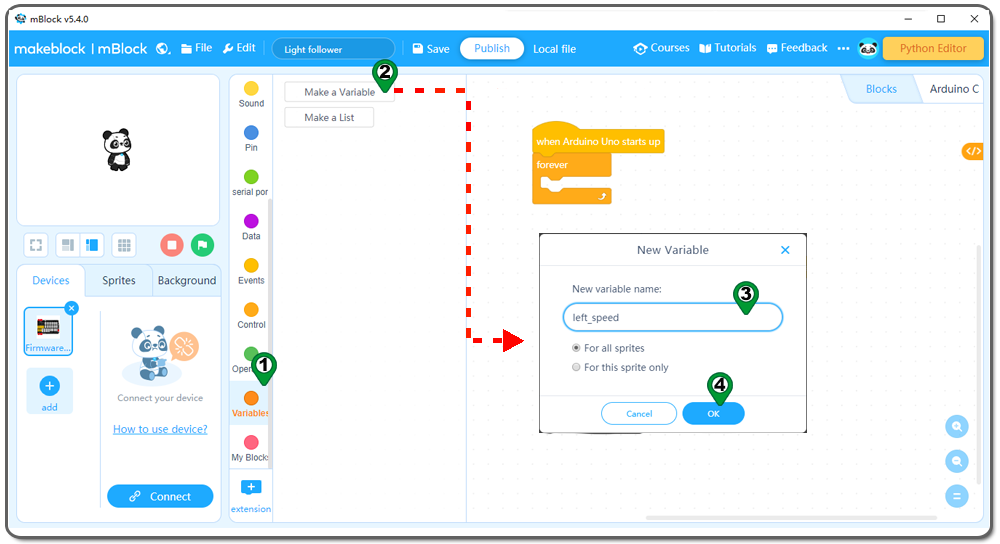
Schritt 7): Klicken Sie auf Variable , dann auf Make a Variable, ein neuer Dialog erscheint, schreiben Sie left_speed, dann klicken Sie auf OK, Sie haben eine neue Variable left_speed. Verwenden Sie die gleiche Methode, um eine Variable right_speed zu erstellen;
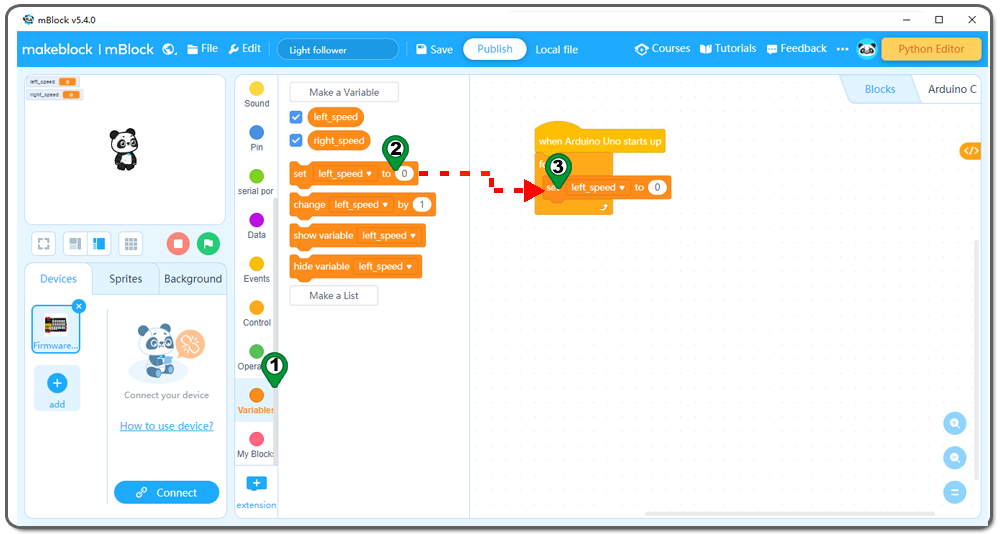
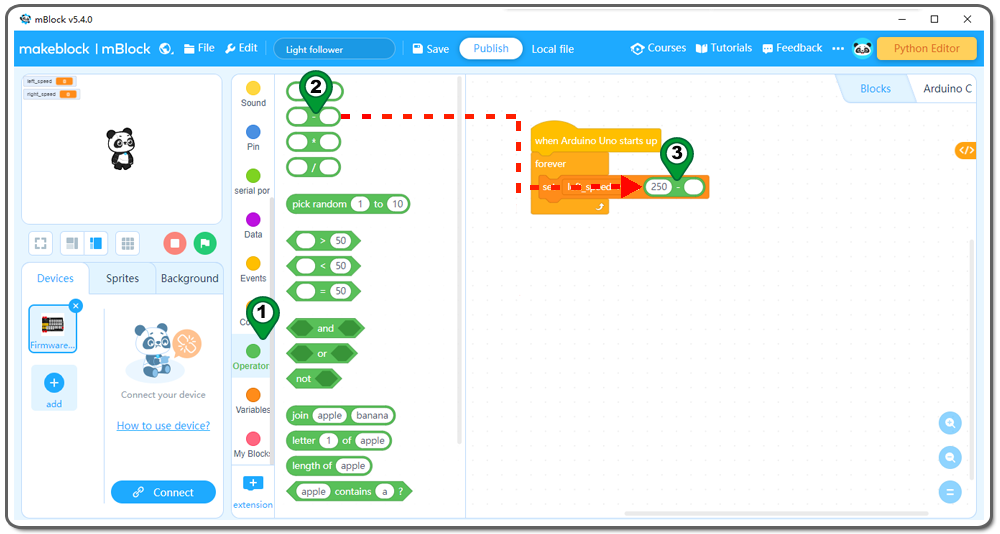
Schritt 8): Klicken Sie erneut auf Variable , dann ziehen Sie den Block set left_speed to in den Programmierbereich und legen ihn dort ab:
Schritt 9): Klicken Sie auf Operation, dann ziehen Sie den Block 0-0 in den Programmierbereich und schreiben Sie 250 in den ersten Bereich wie folgt.
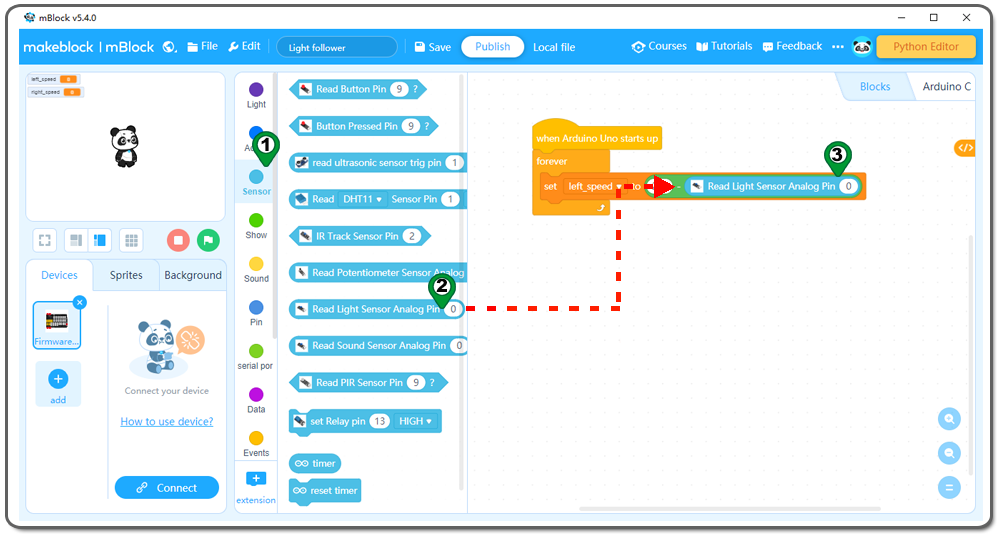
Schritt 10): Klicken Sie auf Sensor , dann ziehen Sie den Block Read Light Sensor Analog Pin block in den Programmierbereich wie folgt;
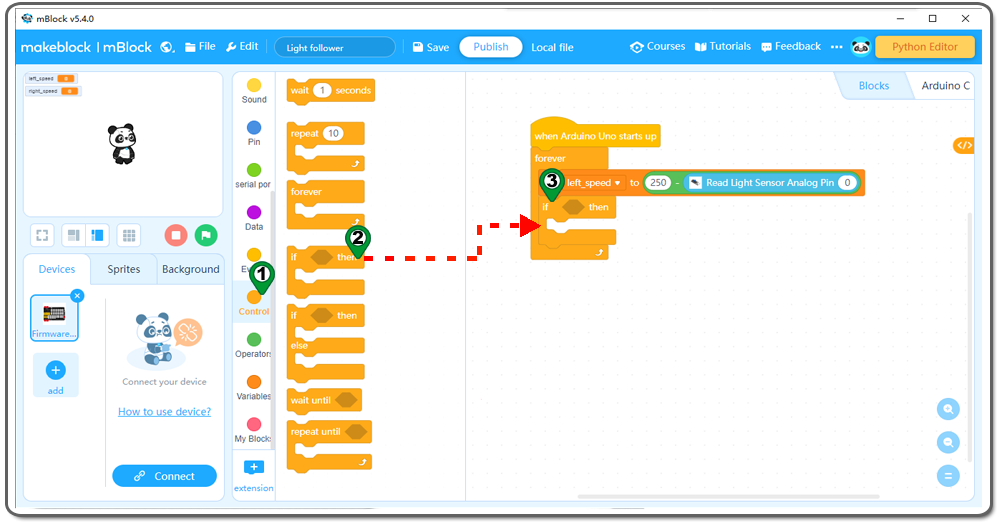
Schritt 11): Klicken Sie auf Control, fügen Sie einen if then Block innerhalb der forever Schleife wie folgt hinzu:
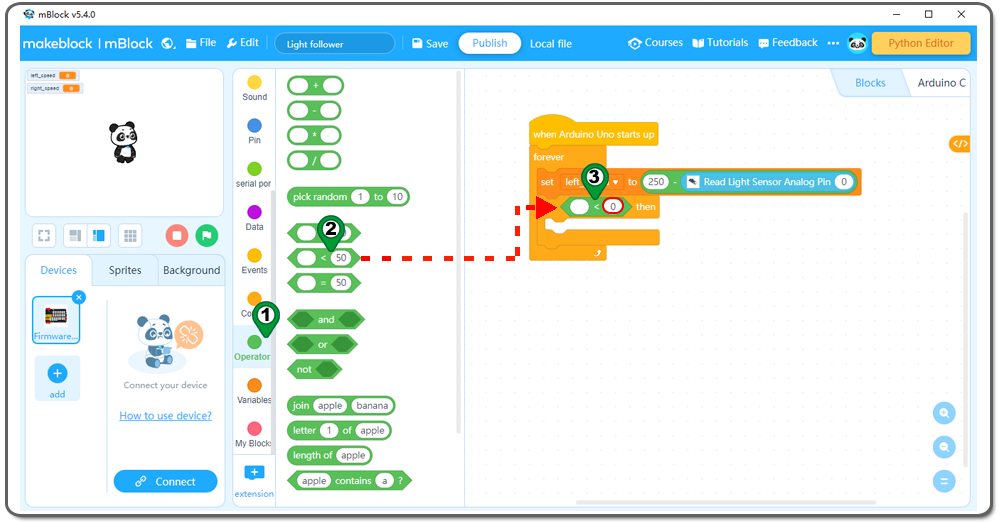
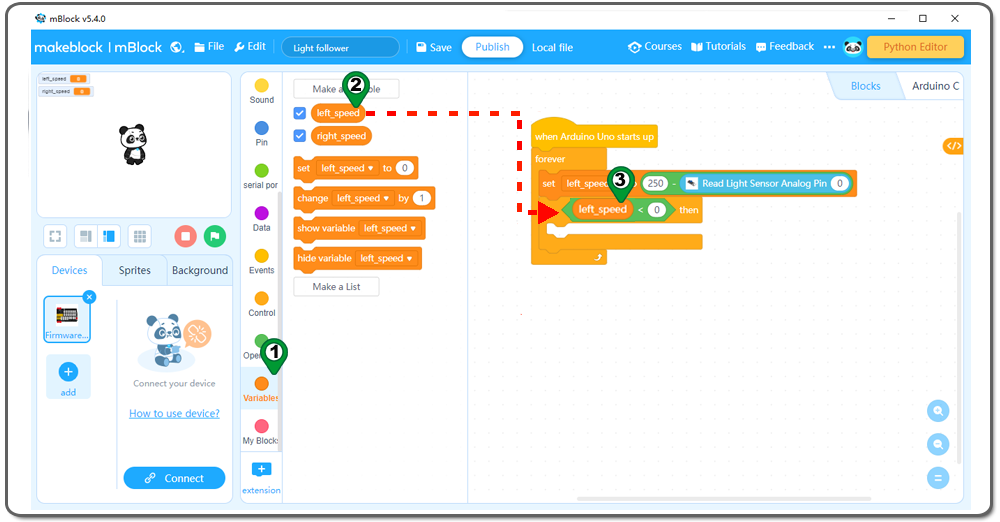
Schritt 12): Klicken Sie auf Operation, dann ziehen Sie den Block 0<0 in den Programmierbereich und schreiben Sie 0 in den zweiten Bereich, wie folgt;
Schritt 13): Klicken Sie auf Variable , dann ziehen Sie den Block left_speed in den Programmierbereich und legen ihn dort ab:
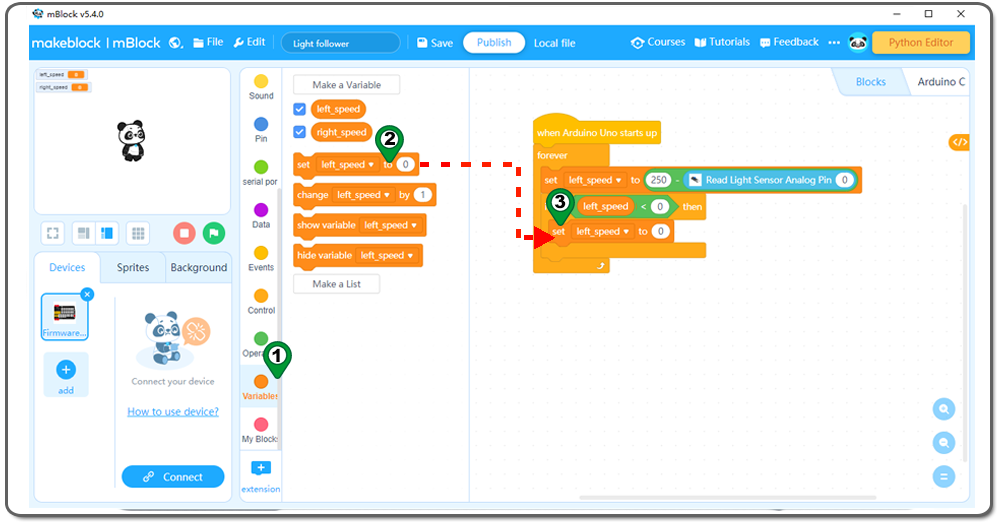
Schritt 14): Klicken Sie erneut auf Variable und ziehen Sie dann set left_speed to zum Block in den Programmierbereich wie folgt:
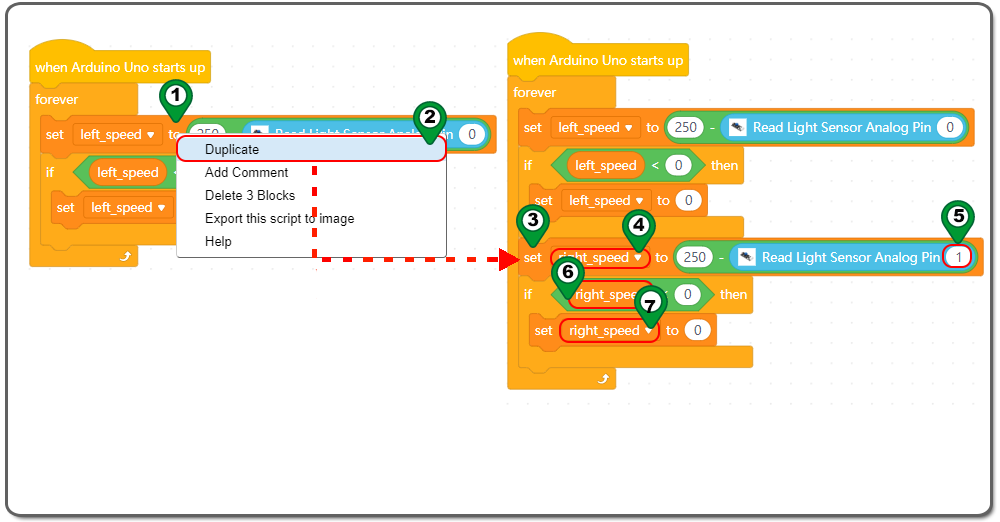
Schritt 15): Klicken Sie mit der rechten Maustaste auf Block set left_speed to , ziehen Sie diesen Block hinter Block if then und ändern Sie left_speed in right_speed wie folgt:
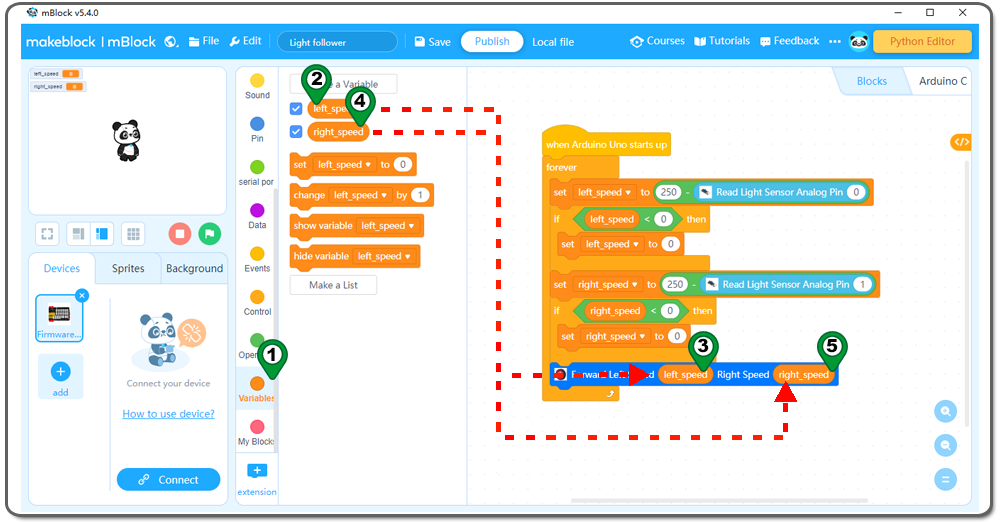
Schritt 16): Klicken Sie erneut auf Action, dann ziehen Sie den Block Forward Left Speed 100 Right Speed 100 in den Programmierbereich und legen ihn dort ab:
Schritt 17): Klicken Sie auf Variable , dann auf den left_speed Block und den right_speedBlock, um den Programmierbereich wie folgt zu öffnen:
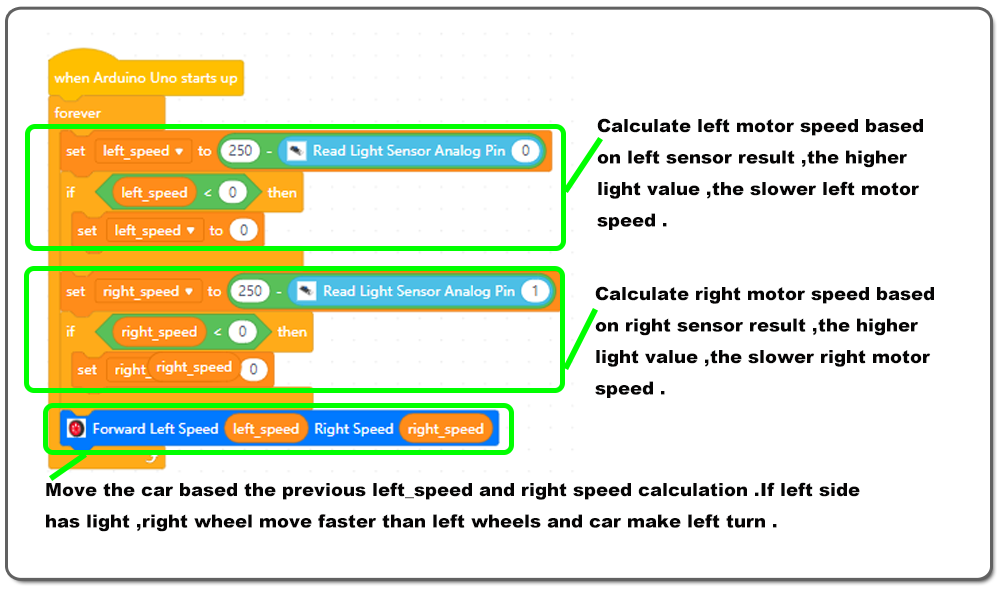
Jetzt haben wir die Blockprogrammierung abgeschlossen. Die endgültigen Blöcke sehen wie folgt aus:
Jetzt sind alle Programmierblöcke fertig! Aus dem obigen Bild geht hervor, dass die Logik ziemlich einfach ist:
Wenn der Arduino gestartet wird, geht der Computer in eine tote Schleife, die den Status des Knopfes prüft. Wenn der Knopf nicht gedrückt wird, stoppt das Servo in der ursprünglichen Position (in meinem Servo 0 Grad) und das Höhenruder ist am Boden, wenn der Knopf gedrückt wird, dreht sich der Servoarm von der 0-Grad-Position in die 180-Grad-Position und das Höhenruder wird in die Luft gehoben.
Schritt 18) Hochladen des Programms auf die OSOYOO-Basisplatine
1) Bitte schließen Sie zunächst Ihr OSOYOO Basisboard mit einem USB-Kabel an Ihren PC an. Klicken Sie dann auf die Schaltfläche “Verbinden” unten in der mBlock-Software, dann wird ein USB-Fenster angezeigt,
2) Aktivieren Sie das Kontrollkästchen Show all connectable device, dann wird ein Dropdown-Menü angezeigt,
3) Wählen Sie Ihren Anschluss aus dem Dropdown-Menü
4) Klicken Sie auf Connect Connect, um Ihren PC mit der OSOYOO-Basisplatine zu verbinden.
5) Nachdem Ihr PC mit der OSOYOO-Basisplatine verbunden ist, klicken Sie bitte auf die Schaltfläche Upload unten in der Software, dann wird der Code auf die OSOYOO-Basisplatine hochgeladen:
In den vorangegangenen Lektionen 1 und 2 haben wir einige grundlegende Steuerungs- und Aktionsprogrammblöcke gelernt. In dieser Lektion werden wir einige neue Programmblöcke kennenlernen: i) Read Light Sensor von Analog Pin Block von Sensor Kategorie
Dieser Block hat eine ovale Form, was bedeutet, dass er einen numerischen Wert zwischen 0 und 255 liefert. Die Zahl Null auf der rechten Seite bedeutet, dass der Sensor den Lichtwert vom A0-Pin (linker Lichtsensor) ablesen wird.
ii)Minus calculation Block der Kategorie Operator
Der obige Block berechnet das Ergebnis von 250 minus dem Wert des A0-Sensors.
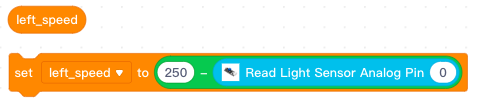
iii)Variable Block und Set Variable to Block in der Kategorie Variable :
Die Variable Block wird häufig definiert, um ein Berechnungsergebnis zur späteren Verwendung zu speichern.
Der obige Block definiert einen variablen Block “left_speed” und setzt dessen Wert auf die Berechnung von 250 minus A0 Lichtsensor-Rückgabewert. Der Lichtwert ist höher, die left_speed ist kleiner, so dass das Auto nach links abbiegen wird.
Hier ist die vollständige Erklärung des Programmblocks:
Das Funktionsprinzip des Fotowiderstands besteht darin, dass der Wert des Fotowiderstands umso niedriger ist, je stärker das Licht ist, das der Fotowiderstand erkennt. Der Wert des Fotowiderstandes ist größer als 0.
Im Programm wird die Geschwindigkeit des linken Motors als Variable left_speed und die Geschwindigkeit des rechten Motors als Variable right_speed eingestellt. Die Motordrehzahl liegt zwischen 0-255.
Die Variable left_speed ist gleich 250 minus dem Wert des linken Fotowiderstands (A0) und die Variable right_speed ist gleich 250 minus dem Wert des rechten Fotowiderstands (A1). Wenn die Variablen kleiner als 0 sind, setzt das Programm diese Variablen gleich 0。.
Wenn der Messwert des linken Sensors (A0) kleiner als 250 ist, bewegt sich der linke Motor vorwärts;
Wenn der Wert des linken Sensors (A0) größer als 250 ist, hält der linke Motor an;
Wenn der Wert des rechten Sensors (A1) weniger als 250 beträgt, bewegt sich der rechte Motor vorwärts;
Wenn der Wert des rechten Sensors (A1) mehr als 250 beträgt, hält der rechte Motor an;
Wenn der Wert beider Sensoren kleiner als 250 ist, fahren beide Motoren vorwärts.
Laden Sie den Sketch-Code followlight.ino auf den Arduino hoch. Schalten Sie das Auto ein.
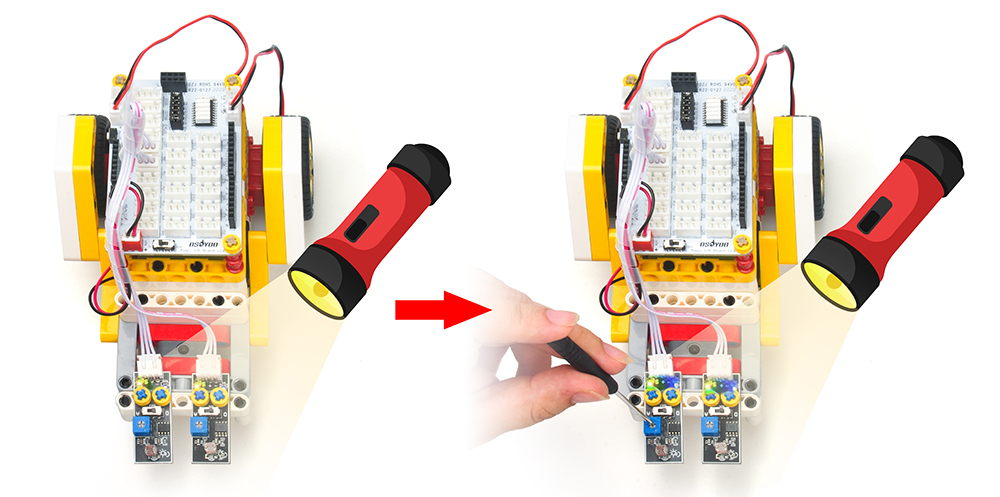
Beleuchten Sie den vorderen Fotowiderstandssensor mit einer Taschenlampe. Dann folgt das Auto dem Blitzlicht, um sich zu bewegen.
Wenn die Taschenlampe auf den Fotowiderstandssensor leuchtet, aber das Fahrzeug sich nicht bewegt. Bitte stellen Sie den Einsteller wie in der Abbildung gezeigt ein. Unter normalen Umständen leuchten das gelbe und das blaue Licht gleichzeitig, wenn die Taschenlampe leuchtet.