In diesem Projekt werden wir das Roboterauto mit dem WLAN verbinden und eine APP verwenden, um das Auto über das Internet zu steuern. Dies ist eine typische Internet of Things (IoT) Anwendung. Die Telefon-APP steuert die Autobewegung, und das Temperatur- und Feuchtigkeitssensormodul sendet Temperatur und Luftfeuchtigkeit an Ihr Telefon.
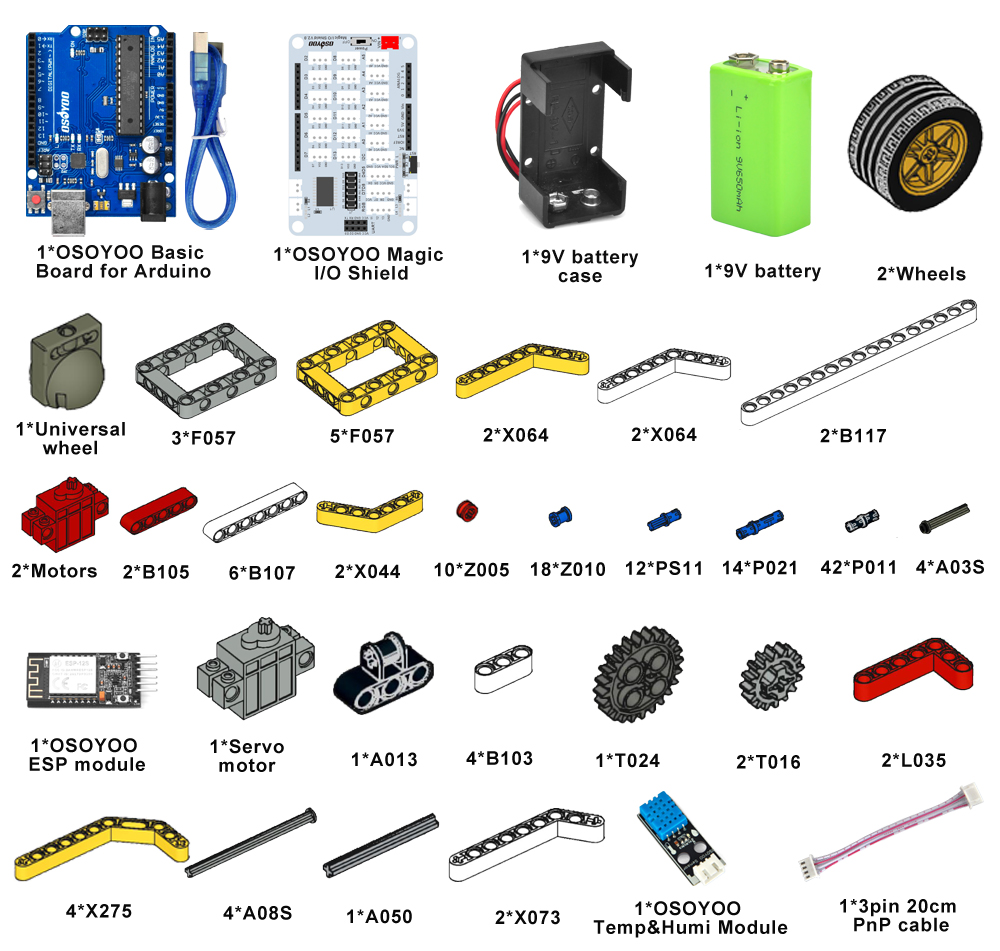
Bitte bereiten Sie die folgenden Teile vor, um dieses Projekt abzuschließen
Anmerkungen: 1. Die Farbe des Bausteins hängt vom tatsächlichen Produkt ab, was die Verwendung nicht beeinträchtigt. 2. ALLE OSOYOO-PRODUKTE FÜR ARDUINO SIND BOARDS VON DRITTANBIETERN, DIE VOLLSTÄNDIG MIT ARDUINO KOMPATIBEL SIND
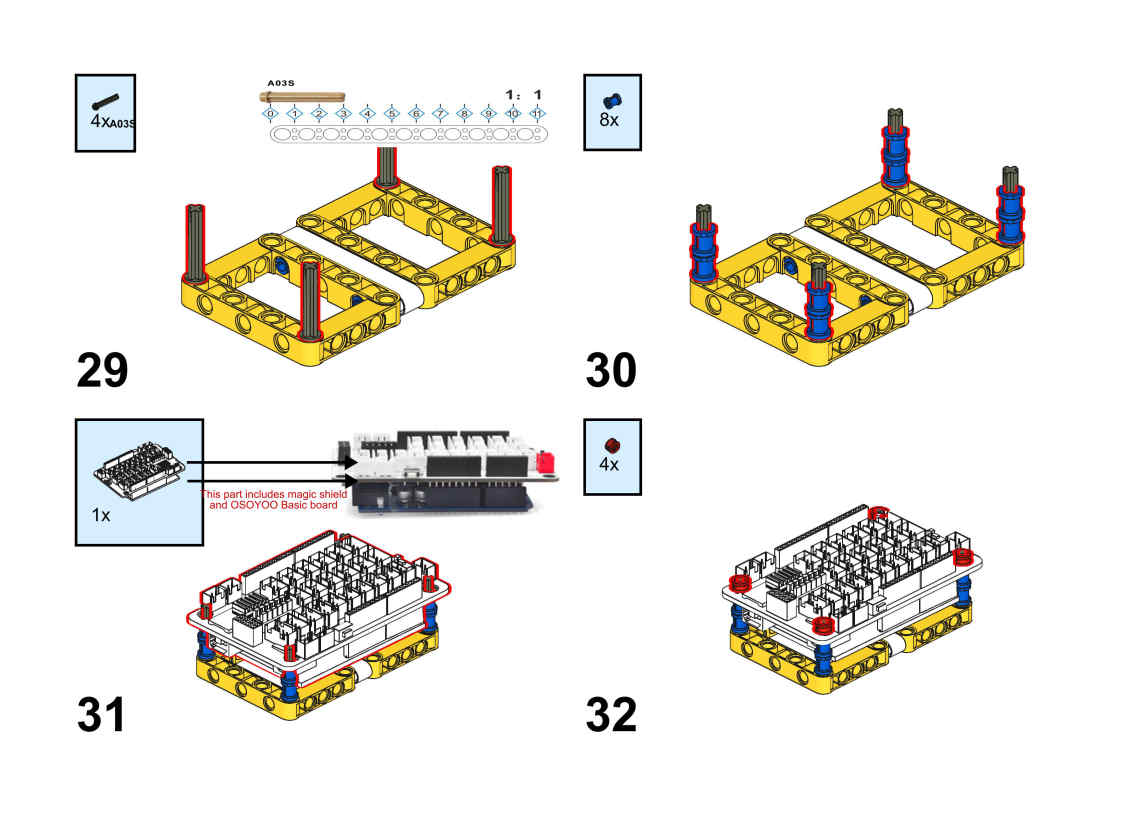
Bevor Sie den Roboter mit Blöcken bauen, installieren Sie bitte [OSOYOO basic board] für Arduino unter [OSOYOO Magic I/O shield] wie folgt (Achtung bitte: die Pins von [I/O shield] sind zuerst auf den Port der Basisplatine ausgerichtet, dann drücken Sie das Shield fest auf die Platine).
Hinweis: Wenn Sie das Roboterauto für Lektion6 gebaut haben, fahren Sie bitte mit Schritt 58 in diesem PDF fort.
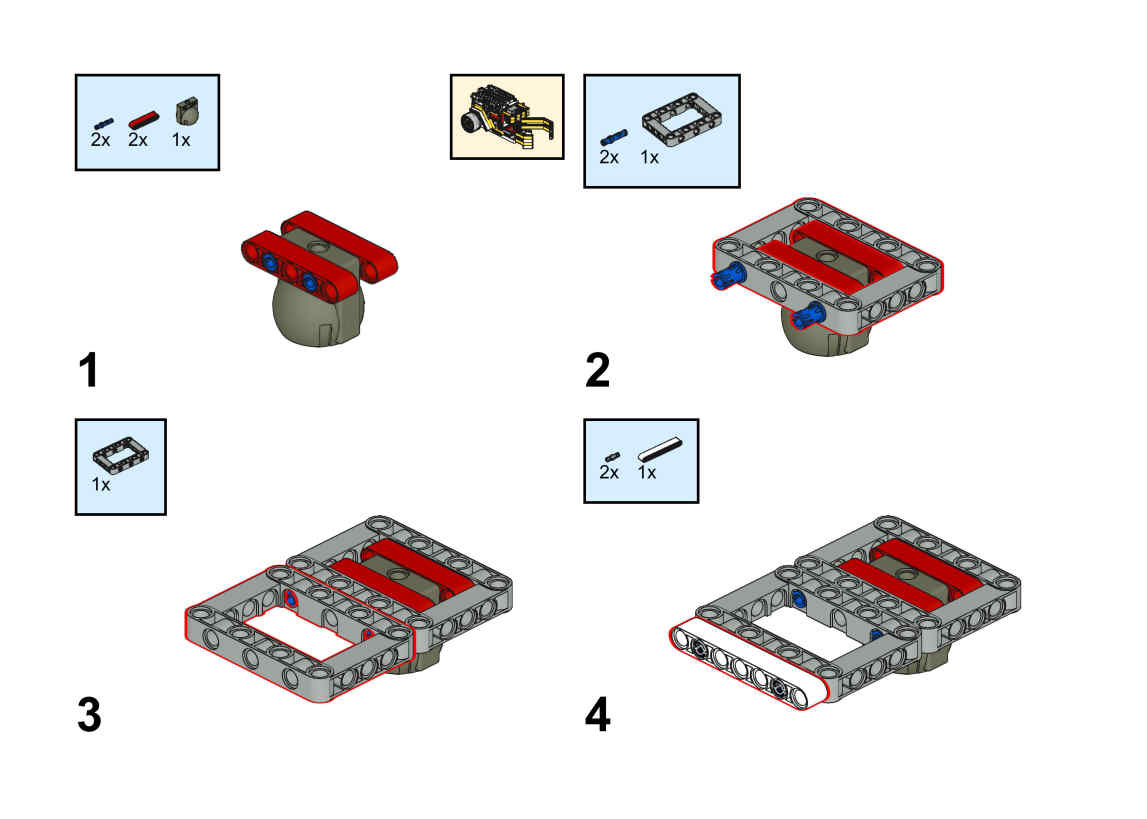
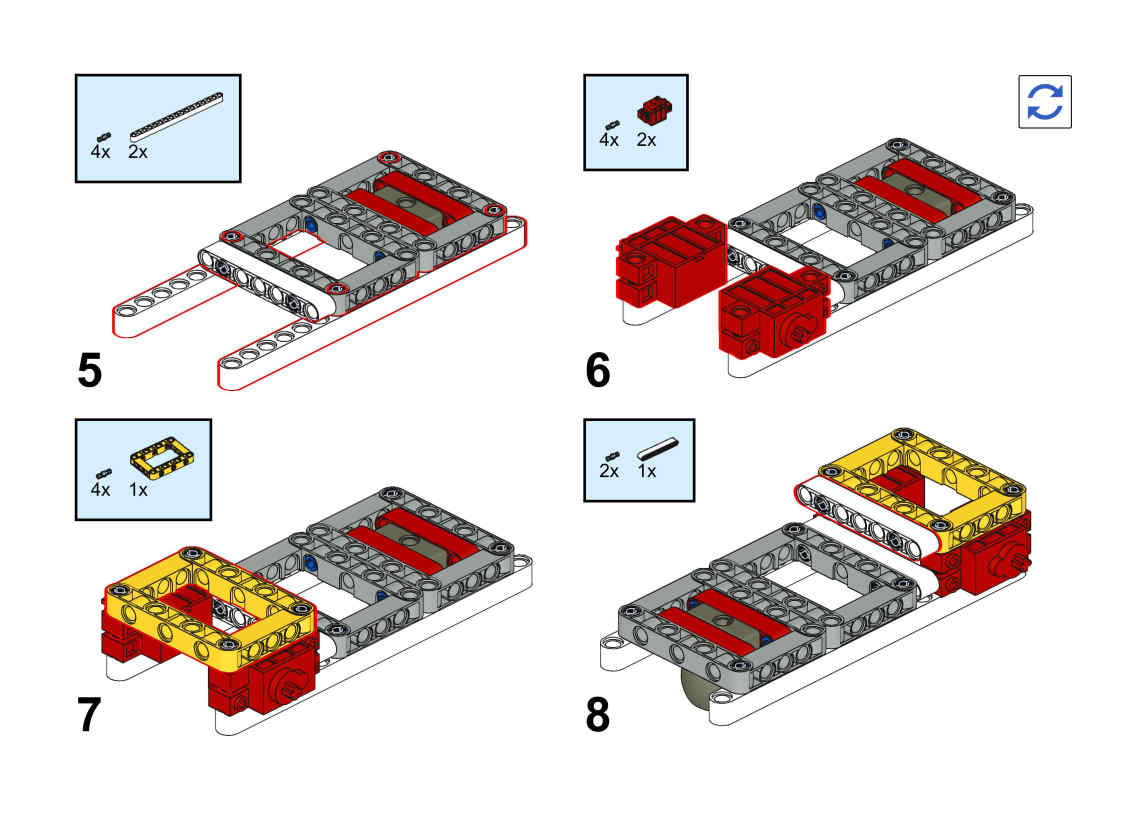
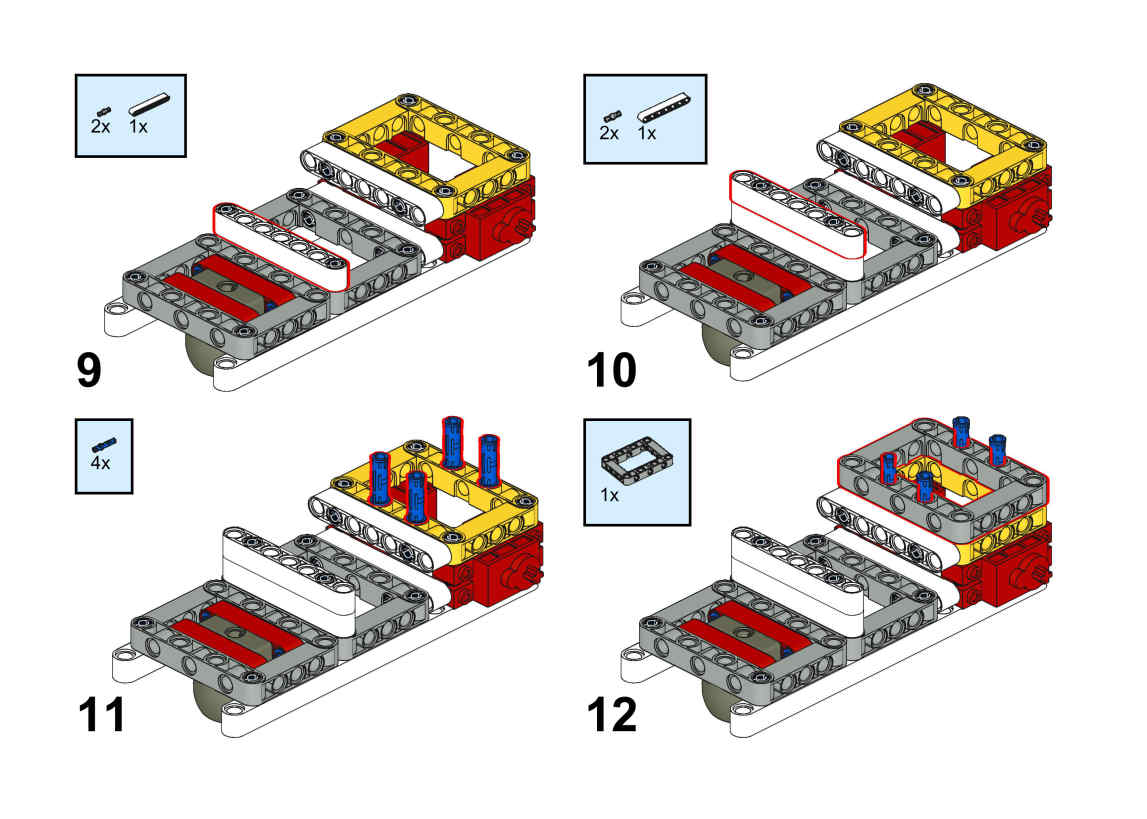
Bitte schließen Sie Motoren und 9V-Batteriefach als Lektion an1.
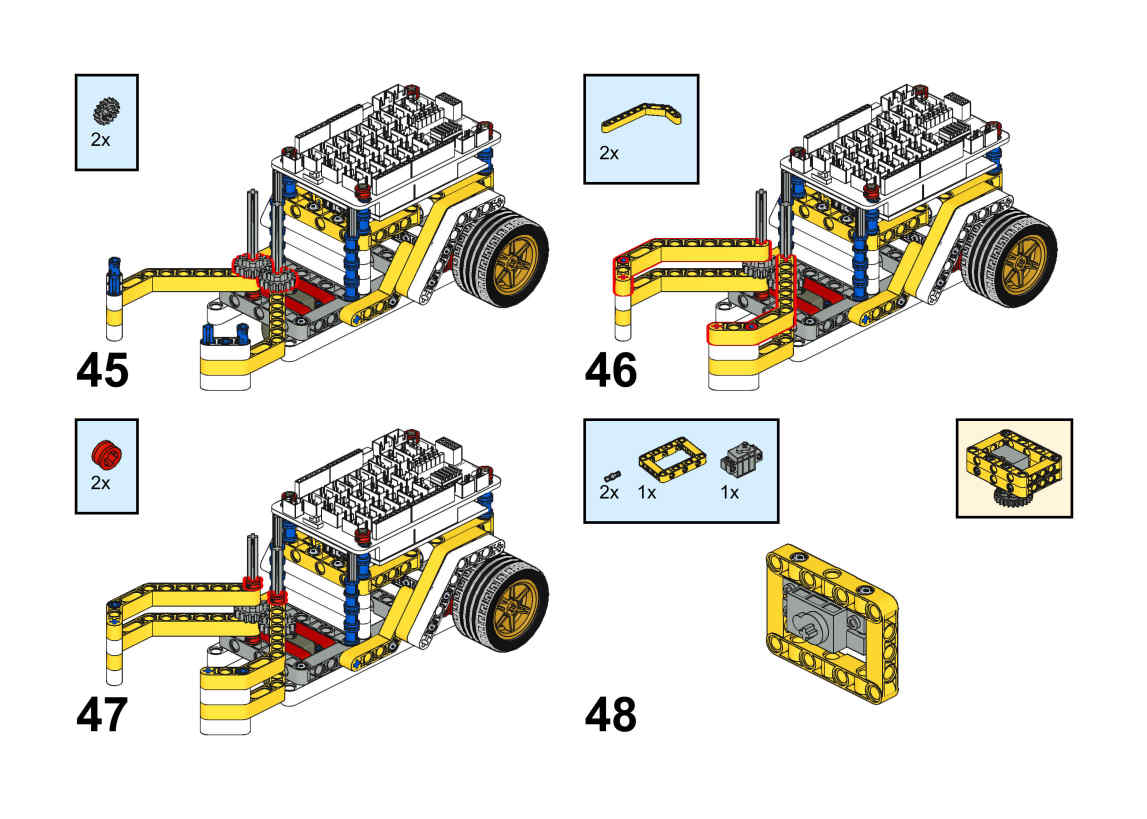
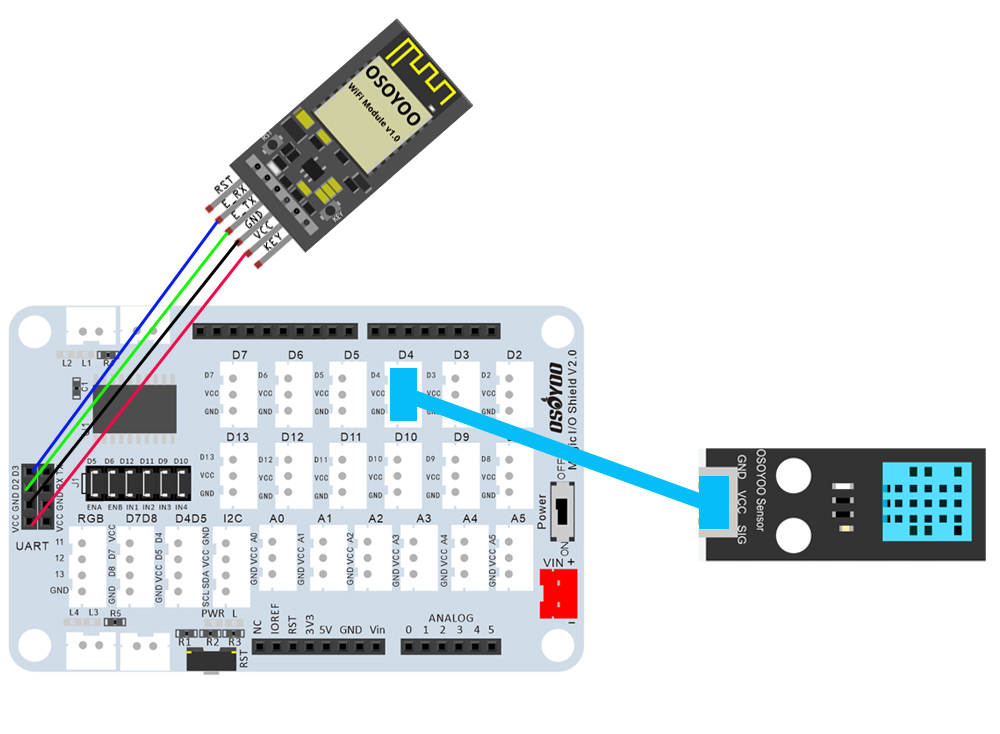
Verbinden Sie dann die mittleren vier Pins des [OSOYOO WIFI Module] mit dem VCC/GDN/D2/D3-Steckplatz des [Magic I/O shield], verbinden Sie den Servomotor wie folgt mit dem D4-Port (Achtung: Es gibt sechs Überbrückungskappen auf ENA / ENB / IN1 / IN2 / IN3 / IN4)
Hinweis: In dieser Lektion wird die Arduino-IDE als Programmierwerkzeug verwendet.
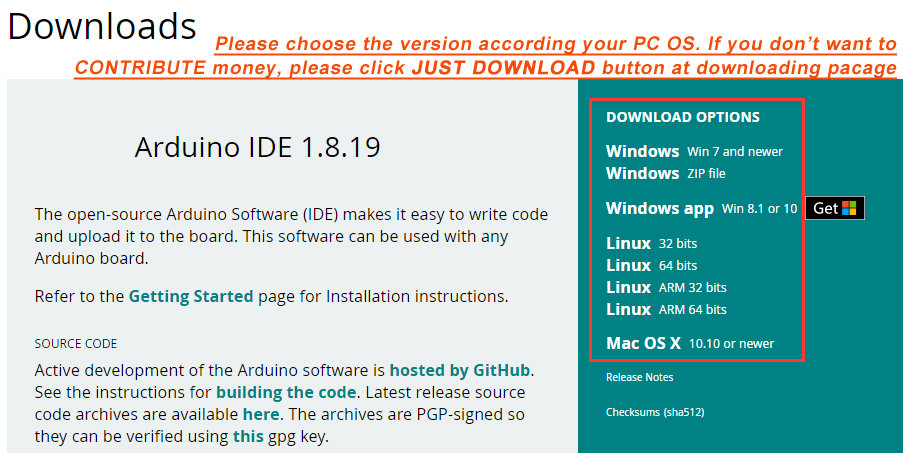
Schritt 1: Installieren Sie die Arduino-IDE. Laden Sie Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en herunter und installieren Sie die Software. Wenn Sie die Arduino-IDE installiert haben, überspringen Sie bitte diesen Schritt.
Schritt 2: Installieren Sie die [WifiEsp-master library] in der IDE (Wenn Sie die [WifiEsp-master]-Bibliothek bereits installiert haben, überspringen Sie bitte diesen Schritt)
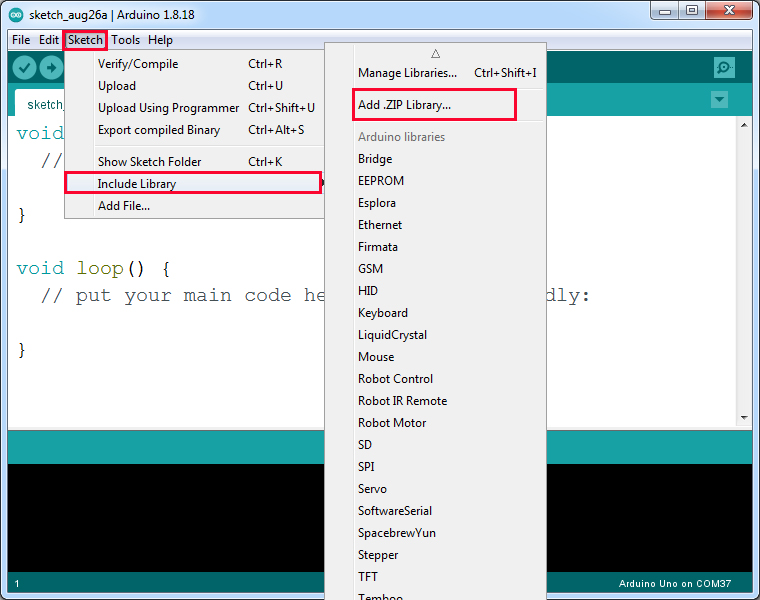
Laden Sie die [WifiEsp-master library] von https://osoyoo.com/driver/WiFiEsp-master.zip herunter und importieren Sie die Bibliothek dann in die IDE (öffnen Sie die IDE-> klicken Sie auf [Sketch]->[BInclude Library] -> [Add .Zip Library])
Schritt 3: Installieren Sie [OsoyooIOT Library] in der IDE (Wenn Sie [OsoyooIOT Library] bereits installiert haben, überspringen Sie bitte diesen Schritt)
Laden Sie [OsoyooIOT Library] von https://osoyoo.com/driver/wifi-iot/OsoyooIOT.zip herunter und importieren Sie die Bibliothek dann in die IDE (Öffnen Sie IDE-> klicken Sie auf [Sketch]->[Include Library]->[Add .Zip Library])
Schritt 4: Installieren Sie [DHT Sensor Library] in der IDE (Wenn Sie [DHT Sensor Library] bereits installiert haben, überspringen Sie bitte diesen Schritt)
Laden Sie [DHT Sensor Library] von https://osoyoo.com/wp-content/uploads/samplecode/DHT.zip herunter und importieren Sie die Bibliothek in die IDE (Öffnen Sie IDE-> klicken Sie auf [Sketch]-> [Include Library] ->[Add .Zip Library])
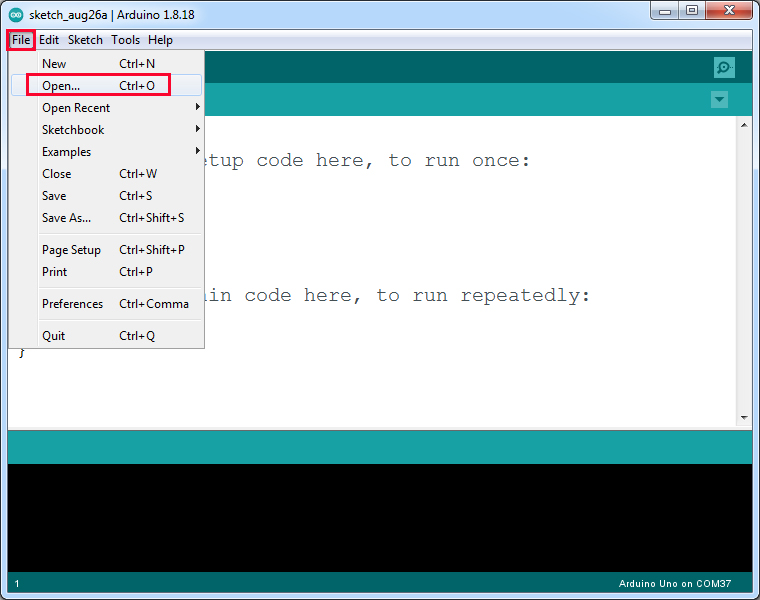
Schritt 6: Verbinden Sie [OSOYOO basic board] für Arduino mit einem USB-Kabel mit dem PC, öffnen Sie die Arduino IDE -> klicken Sie auf [file] -> klicken Sie auf [Open] -> wählen Sie den Code “wifi-block-car.ino” im Ordner wifi-block-car, laden Sie den Code in Arduino. (Hinweis: Bitte schalten Sie die Stromversorgung aus, wenn Ihr Roboter über ein USB-Kabel mit einem PC oder Laptop verbunden ist)
Schritt 7: Sie müssen den Code Zeile 38 und Zeile 39 als WLAN-SSID-Name und Passwort Ihres Routers ändern:
char ssid[] = “***”; // Ersetze *** durch die WLAN-SSID deines Routers (Name) char pass[] = “***”; // ersetze *** durch die WLAN-SSID deines Routers (Passwort)
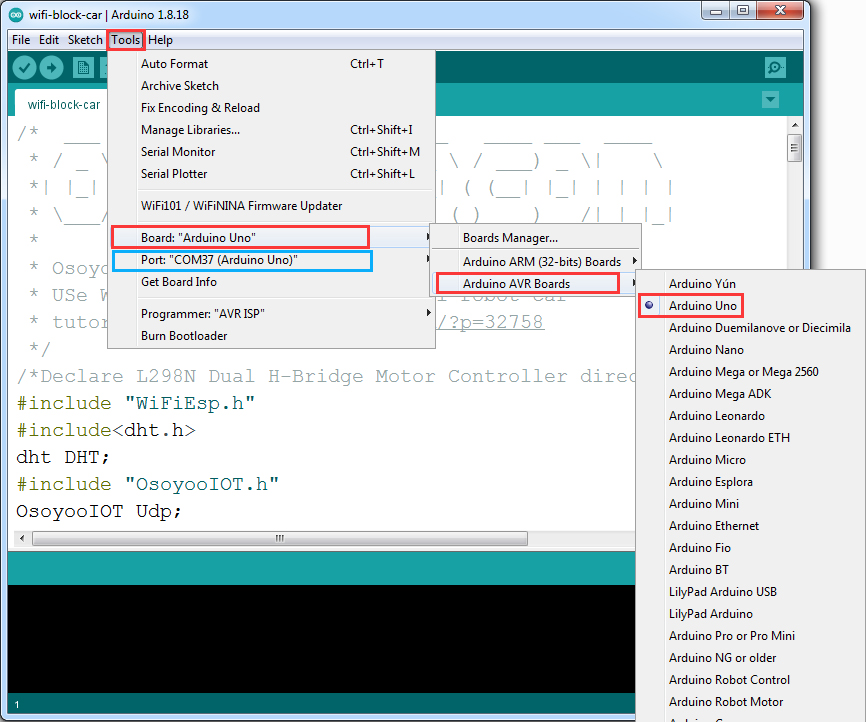
Schritt 8: Wählen Sie die entsprechende Platine und den entsprechenden Port für Ihr Projekt aus und laden Sie die Skizze auf die Platine hoch.
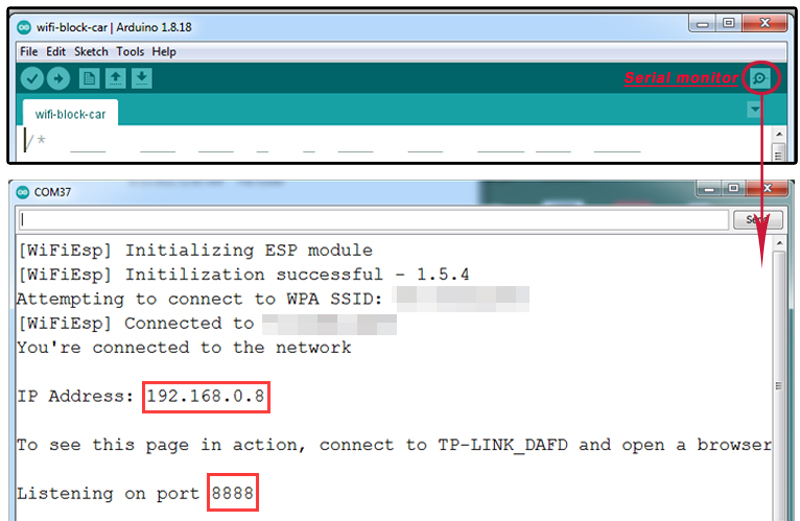
Schritt 9: Klicken Sie auf das Fenster Serieller Monitor in der oberen rechten Ecke der IDE, Sie sehen folgendes Ergebnis (Hinweis: Ihr PC und der Roboter sind mit demselben LAN-Netzwerk verbunden):
TIPPS:
Wenn Sie feststellen, dass die Geschwindigkeit für das Auto langsam oder schnell ist, öffnen Sie bitte den Code und ändern Sie den Wert von line33 in line35 wie folgt:
APP-Installation und -Einstellung: Schritt 1) Laden Sie [OSOYOO Iot udp APP] herunter, indem Sie [OSOYOO Iot udp APP] im Apple Store (iPhone / iPad) oder Google Play Store (Android-Gerät) suchen.
Schritt 2): Installieren Sie die [OSOYOO Iot udp APP] in Ihrem Telefon und stellen Sie sicher, dass Ihr Mobiltelefon mit demselben LAN-Netzwerk wie Ihr Roboterauto für Arduino verbunden ist.
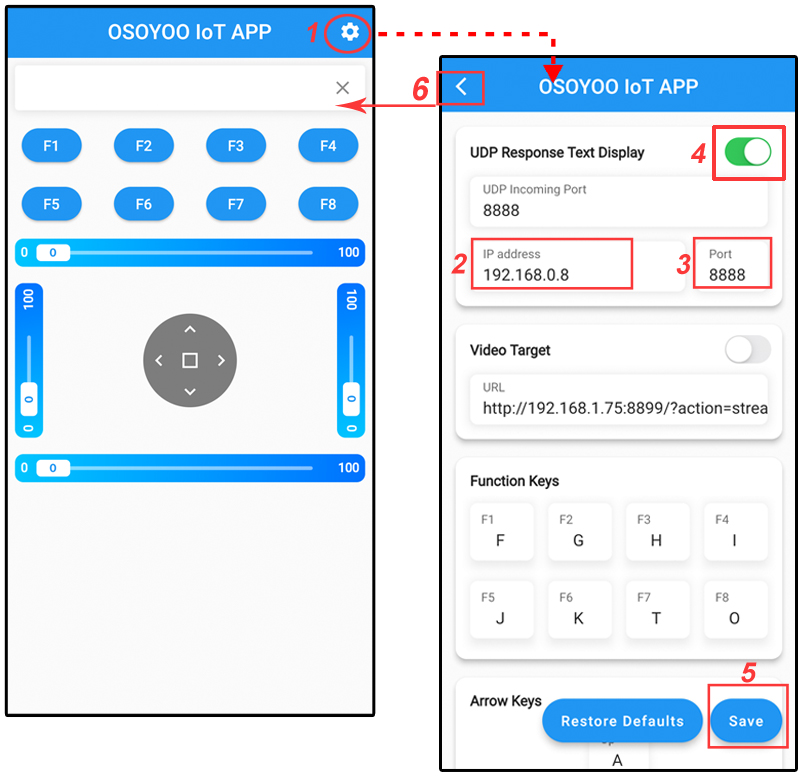
Schritt 3): Legen Sie die IP-Adresse in der APP fest 1)Öffnen Sie die APP und klicken Sie auf die Schaltfläche Einstellungen in der oberen rechten Ecke
2)Verwenden Sie die IP-Adresse, die Sie im Fenster des seriellen Monitors erhalten (für unseren Roboter ist 192.168.0.8), um die Standard-IP 192.168.1.255 zu ersetzen
3)Behalten Sie die Standardportnummer 8888 bei, ohne sie zu ändern
4)Schalten Sie den Schalter der UDP-Antworttextanzeige ein
5)Klicken Sie auf die Schaltfläche [Save], um die soeben vorgenommenen Änderungen zu speichern
6)Klicken Sie auf den Zurück-Pfeil, um zur vorderen APP-Benutzeroberfläche zurückzukehren
Steuere das Roboterauto:
Sie können die Pfeiltasten verwenden, um die Fahrzeugbewegung zu steuern und die Temperatur und Luftfeuchtigkeit anzuzeigen, die vom DHT11-Sensor in Ihrem Auto erkannt werden, wenn Sie auf eine beliebige Schaltfläche klicken.