Mecanum Wheel Robot Car Komplettpaket (mit 18650 Batterien)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
In dieser Lektion müssen Sie Lektion 1 abschließen, bevor Sie mit dieser Lektion fortfahren. Wir verwenden das Ultraschallmodul, um Hindernisse zu „sehen“ und die Entfernung zu messen. Wenn der Abstand kleiner als der vordefinierte Schwellenwert ist, ertönt der Summer und das Auto dreht sich automatisch vom Hindernis weg.
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2 x linke Räder/2 x rechte Räder und Motor x 4)
OSOYOO Mega2560 Board voll kompatibel mit Arduino x 1
OSOYOO WiFi-Schild x 1
OSOYOO Model Y Motortreiber x 1
OSOYOO MG90 Servomotor x 1
OSOYOO Ultraschallsensormodul x1
OSOYOO Ultraschallhalterung
OSOYOO Batteriekasten x 1
OSOYOO 3-Pin-Überbrückungskabel von Buchse zu Buchse x1
OSOYOO 6-Pin-Überbrückungskabel von Stecker zu Buchse x2
OSOYOO 2-polige XH.25-Buchse auf Buchse x1
OSOYOO 10-Pin-Überbrückungskabel Stecker auf Buchse x1
18650 Batterien (3,7 V) x 2
Sie müssen Lektion 1 (Zusammenbau des Autos) abschließen, bevor Sie mit dieser Lektion fortfahren. In dieser Lektion 3 fügen wir einen mg90-Servomotor und das in Lektion 1 gebaute Roboterauto hinzu.
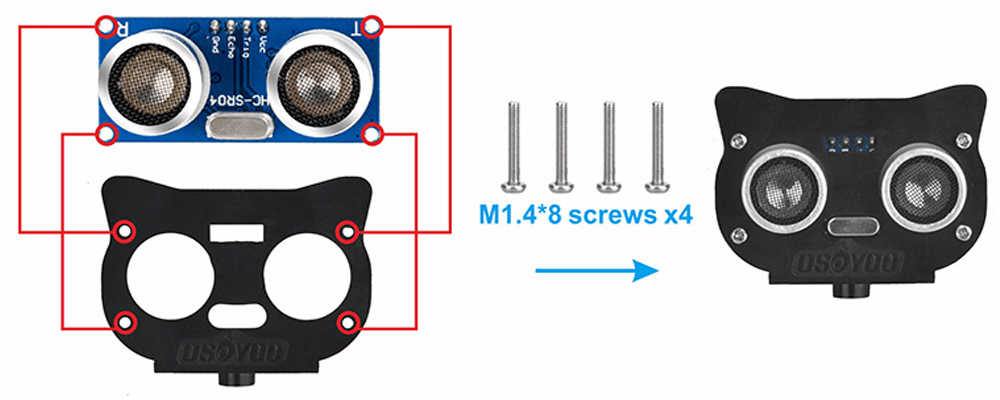
Schritt 1: Installieren Sie das Ultraschallmodul an der Halterung mit 4 Stück M1,4 * 8-Schrauben und M1,4-Muttern.
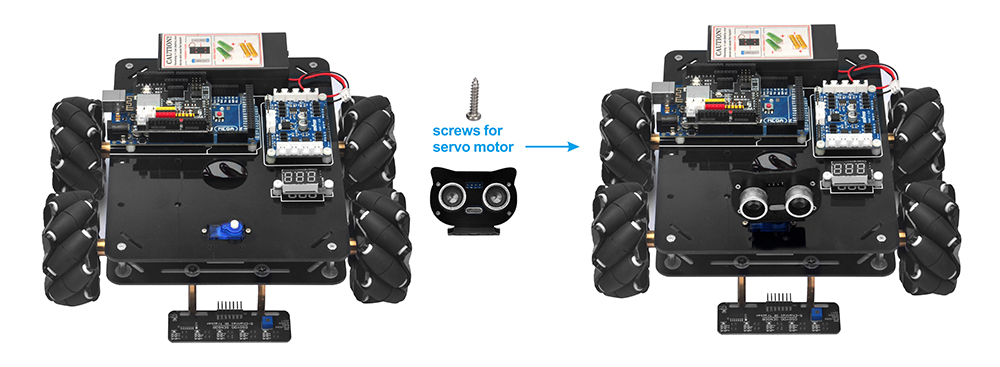
Schritt 2: Montieren Sie die Halterung für das Ultraschallmodul mit einer selbstschneidenden M2 * 4-Schraube am Servomotor.
Wenn Sie den Ultraschall darunter platzieren, da sich die selbstschneidenden Schrauben leicht lösen.
A. Stützen Sie den Motor von unten ab, da sich die selbstschneidenden Schrauben leicht lösen.
B.Setzen Sie die Schraube erst nach dem Ausrichtungsprozess ein.
Sie müssen Lektion 1 (Zusammenbau des Autos) Schaltungsanschluss absolvieren. Sie müssen nichts ändern, lassen Sie einfach die Hardware-Kabelverbindung so wie sie ist.
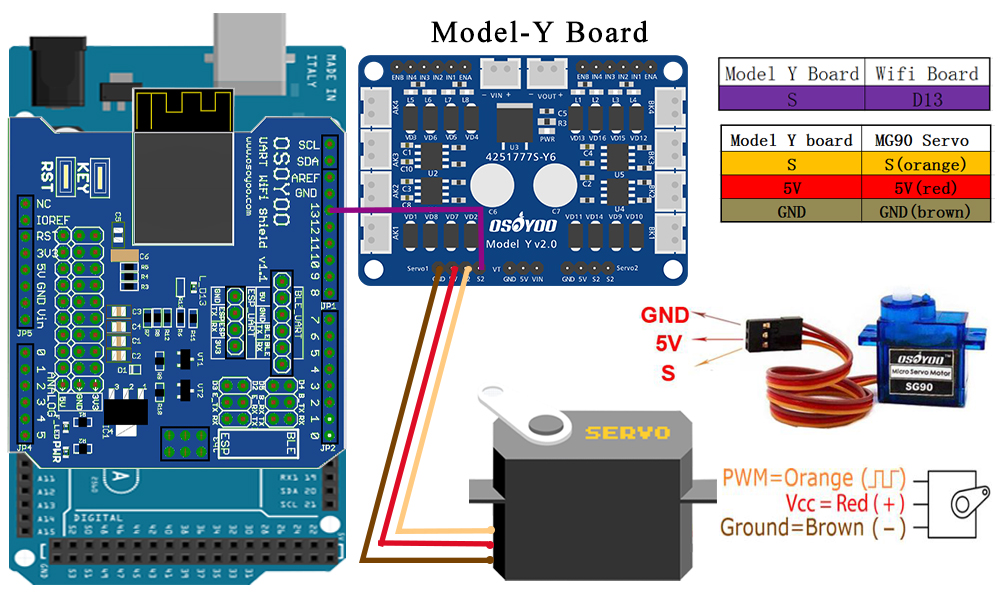
Schritt 3: Bitte lassen Sie alle Verbindungen der Lektion 1 so wie sie sind. Stellen Sie vor dem Anschließen der Kabel sicher, dass Sie den SG90-Servomotor wie folgt mit der Modell-Y-Platine und dem OSOYOO-Uart-WLAN-Schild verbunden haben.
(Hinweis: Sie benötigen 1 Stück Überbrückungsdrähte von Stecker zu Buchse aus unserem 10-teiligen Überbrückungskabelbündel. Jede Farbe aus dem Bündel ist in Ordnung. Der Rest der Drähte dient als Ersatzteil für möglicherweise gebrochene oder beschädigte Drähte.)
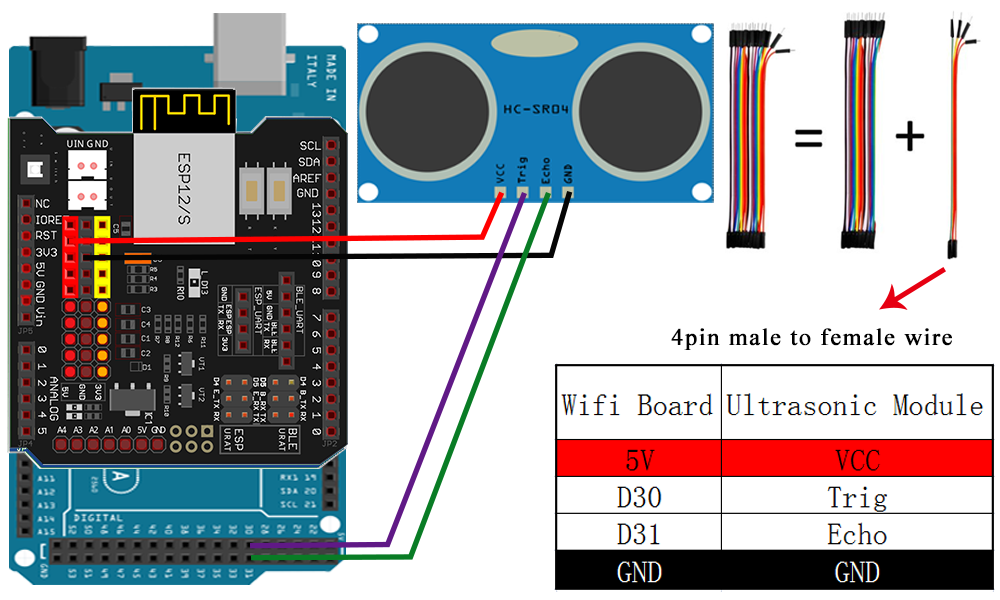
Schritt 4: Verbinden Sie VCC, Trig, Echo, GND des Ultraschallmoduls mit 5 V, D30, D31, GND des WLAN-Schildes mit 4 Stück Stecker-zu-Buchse-Überbrückungsdrähten.
(Hinweis: Sie benötigen 4 Stück Überbrückungsdrähte von Stecker zu Buchse aus unserem 10-teiligen Überbrückungskabelbündel. Jede Farbe aus dem Bündel ist in Ordnung. Der Rest der Drähte dient als Ersatzteil für möglicherweise gebrochene oder beschädigte Drähte.)
Step 1: Install latest Arduino IDE (If you have Arduino IDE version after 1.1.16, please skip this step). Download Arduino IDE from , then install the software.
Schritt 1: Installieren Sie die neueste Arduino IDE (Wenn Sie eine Arduino IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt). Laden Sie die Arduino IDE von https://www.arduino.cc/en/Main/Software?setlang=en , installieren Sie dann die Software.
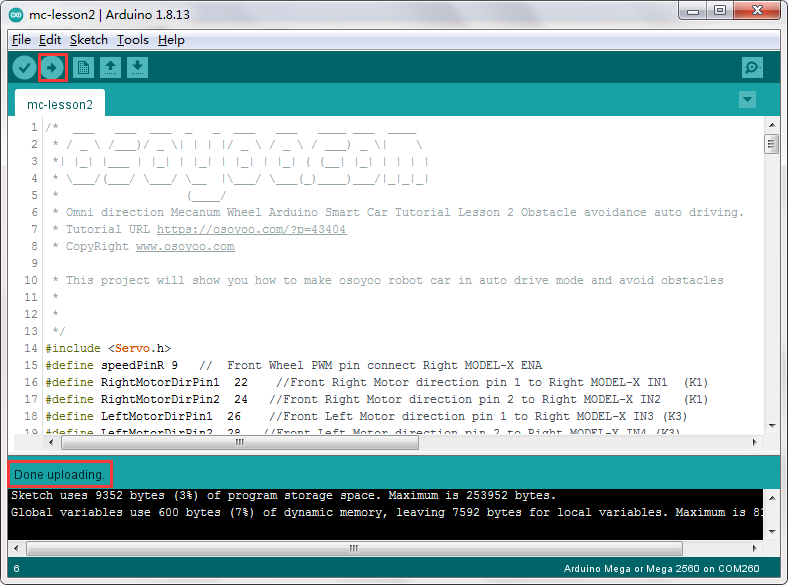
Schritt 3: Schließen Sie das Mega2560-Board mit einem USB-Kabel an den PC an, öffnen Sie die Arduino IDE -> klicken Sie auf Datei -> klicken Sie auf Öffnen -> wählen Sie den Code „m2-lesson2“ im Unterrichtsordner, laden Sie den Code wie folgt in Arduino.
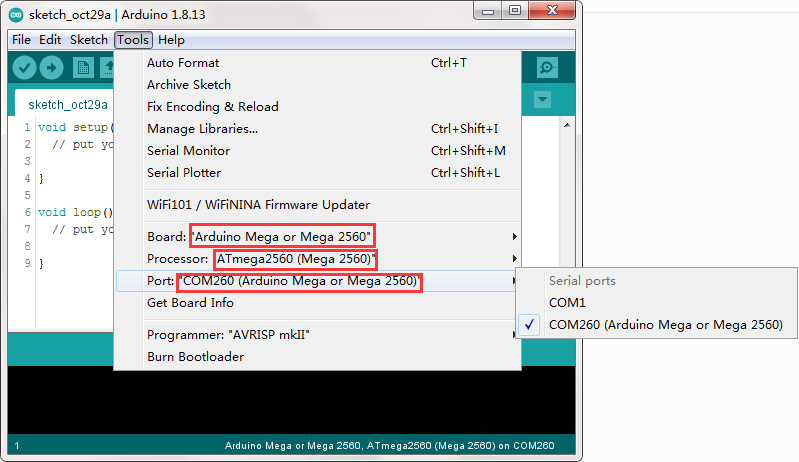
Schritt 4: Wählen Sie das entsprechende Board / Port für Ihr Projekt, laden Sie die Skizze auf das Board hoch.
Schritt 5: Erstausrichtung des Ultraschallsensor-Servos
Nach dem Einschalten der Batterie macht das Servo eine Bewegung und hält schließlich für 5 Sekunden in einer Richtung an.
Während dieser ersten 5 Sekunden müssen Sie sicherstellen, dass der Ultraschallsensor (zwei Augen) gerade nach vorne zeigt.
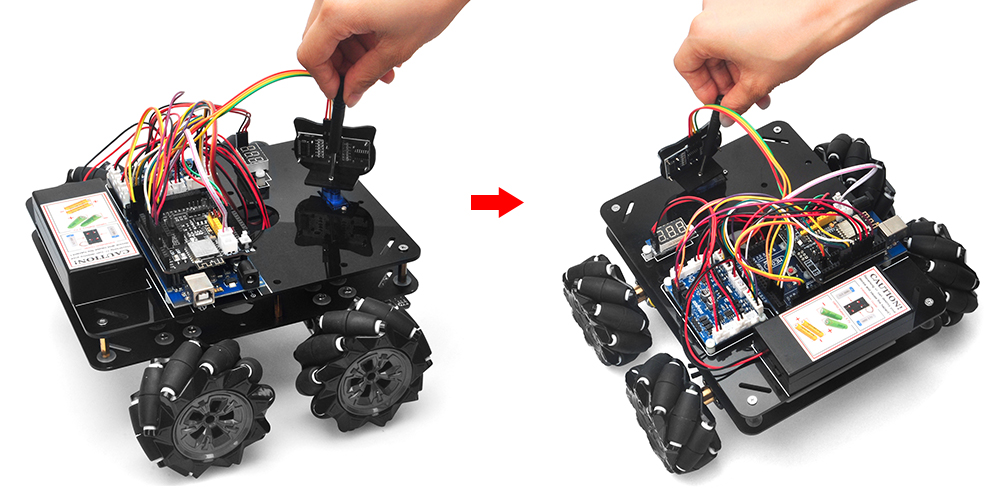
Wenn es nicht geradeaus ist, sollten Sie die Batterie sofort ausschalten und den Sensor vom Servo entfernen, ihn wieder installieren und ihn wie im folgenden Bild gerade nach vorne zeigen lassen. Andernfalls funktioniert das Hindernisvermeidungsprogramm nicht richtig.
Schalten Sie nach dem Anpassen der Sensorrichtung die Batterie wieder ein. Wenn die Richtung nicht geradeaus ist, schalten Sie die Batterie aus und führen Sie die Richtungsausrichtung erneut durch.
Wenn sich das Ultraschallmodul in die Vorderansichtsposition dreht, müssen Sie die Sensorposition nicht mehr anpassen. Warte einfach 5 Sekunden. Wenn kein Hindernis erkannt wird, fährt das Auto vorwärts. Wenn Hindernisse erkannt werden, stoppt das Auto, das Ultraschallmodul dreht sich von rechts nach links, um Hindernisse in der Umgebung zu erkennen. Das Roboterauto entscheidet anhand der Hindernissensordaten und unseres Hindernisvermeidungsalgorithmus, ob es nach links, rechts oder rückwärts abbiegen soll.
Manchmal kann es vorkommen, dass Ihr Auto kollidiert und die Position Ihres Ultraschallsensors ändert. Sie müssen daran denken, die Sensorrichtung erneut auszurichten.
Das Roboterauto entscheidet anhand der Hindernissensordaten und unseres Hindernisvermeidungsalgorithmus, ob es nach links, rechts oder rückwärts abbiegen soll. Manchmal kann es vorkommen, dass Ihr Auto kollidiert und die Position Ihres Ultraschallsensors ändert. Sie müssen daran denken, die Sensorrichtung erneut auszurichten.
Wichtige Parameter in der Skizzendatei
Die folgenden Parameter in Zeile 35 bis 39 von m2-lesson2.ino sind sehr wichtig, um die Leistung zu optimieren. Siehe die Kommentare in den #define-Anweisungen:
#define FAST_SPEED 170 //beide Seiten der Motordrehzahl
#define SPEED 100 //beide Seiten der Motordrehzahl
#define TURN_SPEED 150 //beide Seiten der Motordrehzahl
#define BACK_SPEED1 150 //Geschwindigkeit zurück
#define BACK_SPEED2 100 //Geschwindigkeit zurück