Sie können das Benutzerhandbuch von herunterladen:

In dieser Lektion werden wir zwei OSOYOO Tracking-Sensoren verwenden, um das Auto automatisch entlang der schwarzen Gleislinie auf dem weißen Boden zu steuern. Die Software in dieser Lektion liest Daten von den Tracking-Sensoren und führt das Auto automatisch entlang der schwarzen Linie auf dem weißen Boden.
Ein Line Follower Robot ist, wie der Name schon sagt, ein selbstfahrendes Fahrzeug, das einer auf weißem Grund aufgedruckten schwarzen Spurlinie folgt. Die Verfolgungssensoren im Roboter überprüfen, ob sich das Auto außerhalb der Spur befindet. Wenn ja, dann macht das Auto eine negative Bewegung, um das Roboterauto wieder auf die Spur zu bringen.
Wenn du den Rahmen des Autos nicht vervollständigen kannst, lies bitte Lektion 1


Wenn du die grundlegende Drahtverbindung nicht fertiggestellt hast, lies bitteLektion 2
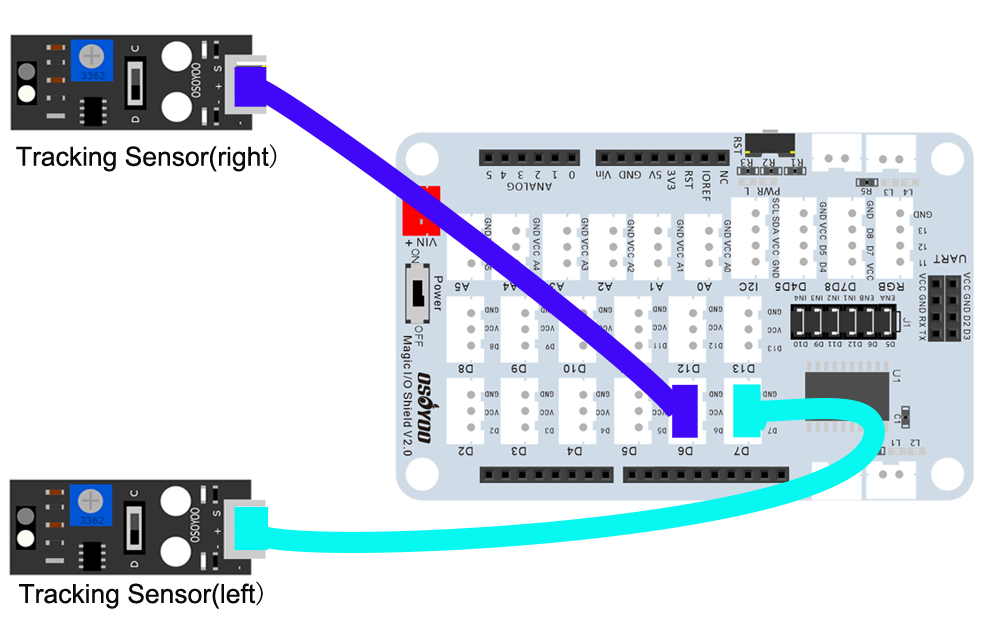
Anschluss:
Linker Spurfolgesensor an D7
Rechter Nachführungssensor an D6

SCHRITT 1:
Laden Sie https://osoyoo.com/driver/2022008400/lesson3.zip herunter, entpacken Sie die Datei, und Sie werden einen Ordner namens lesson3 sehen.
SCHRITT 2:
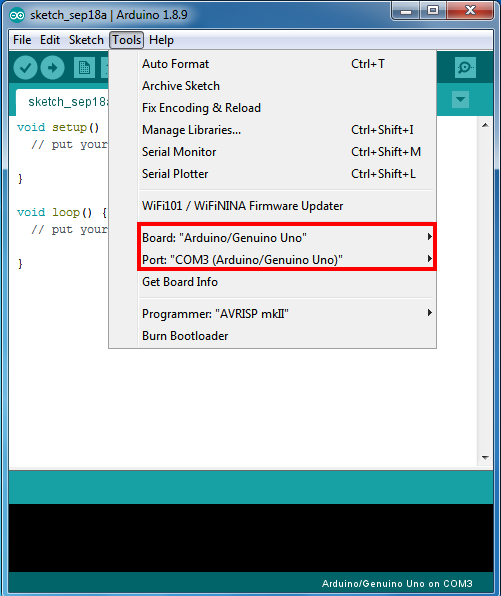
Verbinden Sie das UNO R3 Board mit einem USB Kabel mit dem PC, öffnen Sie die IDE und wählen Sie das entsprechende Board/Port für Ihr Projekt.
Beachten Sie: Schalten Sie die Batterie aus oder ziehen Sie den Netzadapter ab, wenn Sie den Sketch-Code auf das OSOYOO Basic Board für Arduino hochladen.
SCHRITT 3:
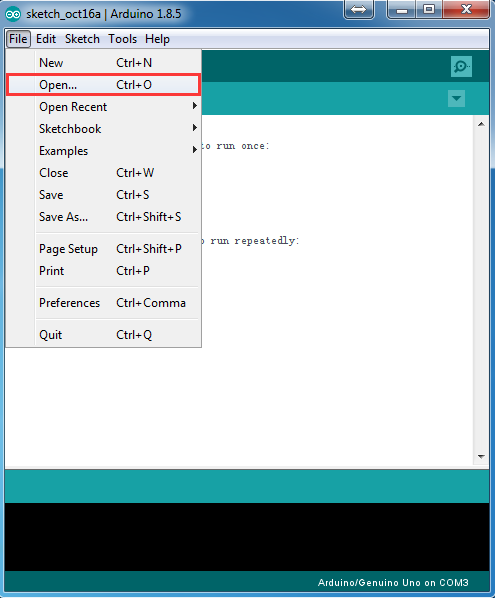
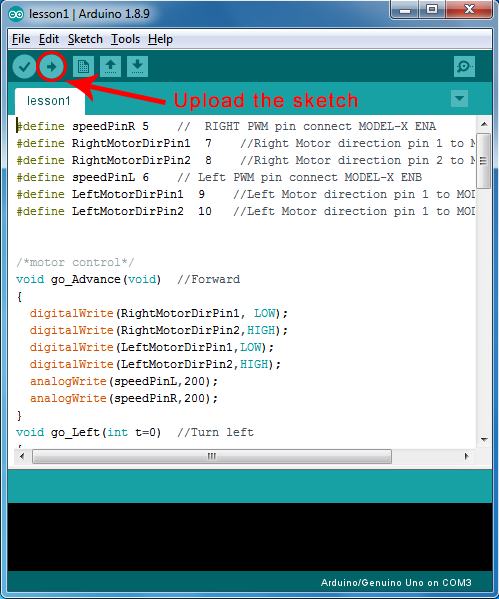
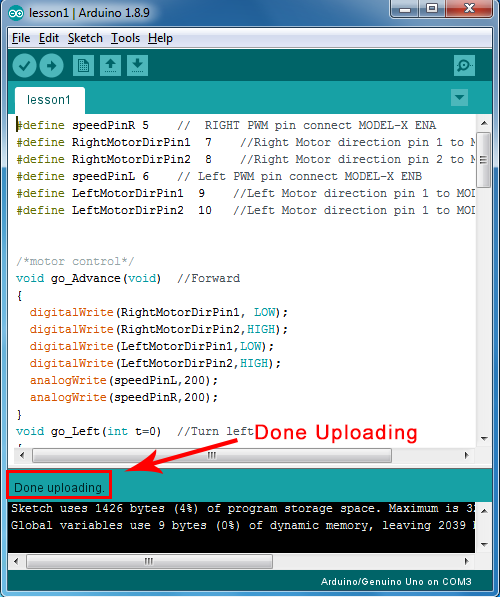
Klicken Sie auf Datei -> klicken Sie auf Öffnen -> wählen Sie den Code “lesson3.ino”, laden Sie den Code in das OSOYOO Basic Board für Arduino, und laden Sie dann den Sketch auf das Board.
Hinweis: Servo-Ausrichtung
Bitte ändern Sie den Standardwert 90 in der folgenden Zeile als FRONT-Wert in der Option 2 in Schritt 5 von Lektion2. Wenn Sie die Radrichtung manuell als Option 1 in Schritt 5 von Lektion 2 ausrichten, überspringen Sie bitte diesen Schritt.
#define FRONT 90 // steering to front
SCHRITT 4:
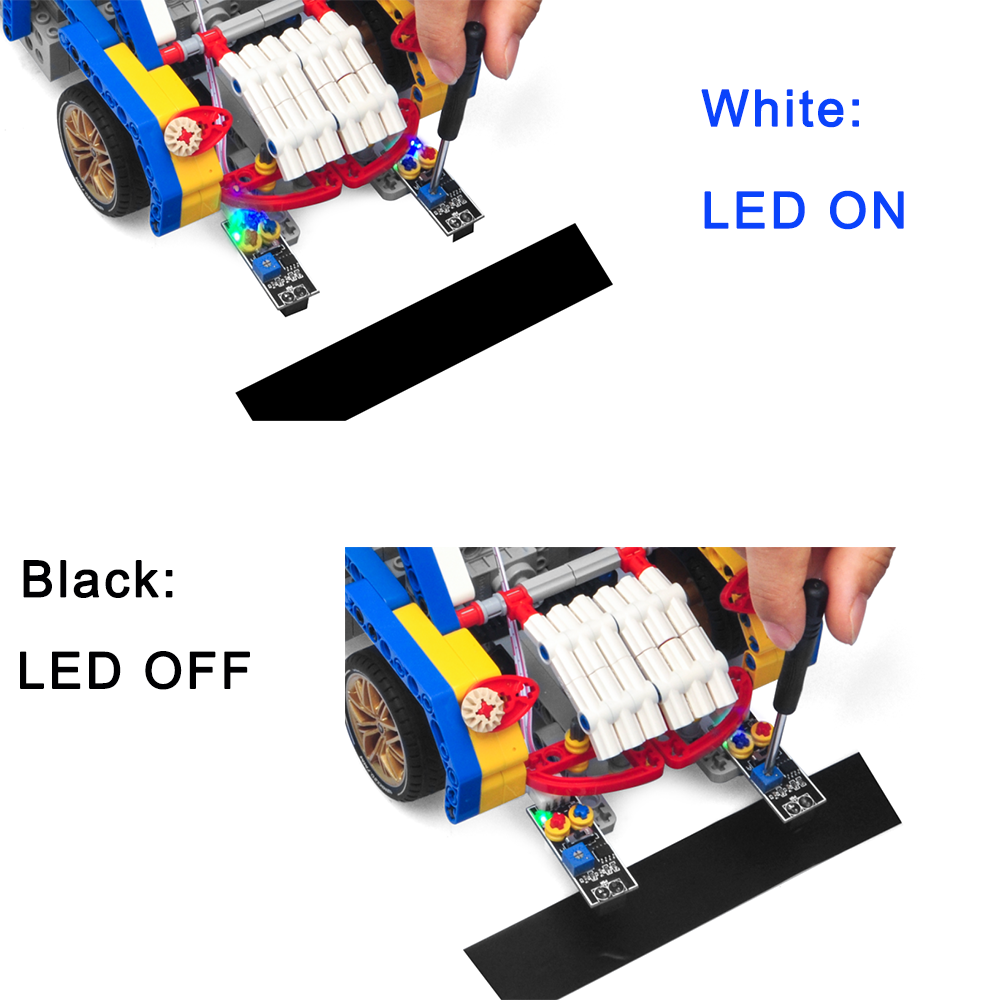
Stellen Sie die Empfindlichkeit der Tracking-Sensormodule ein.
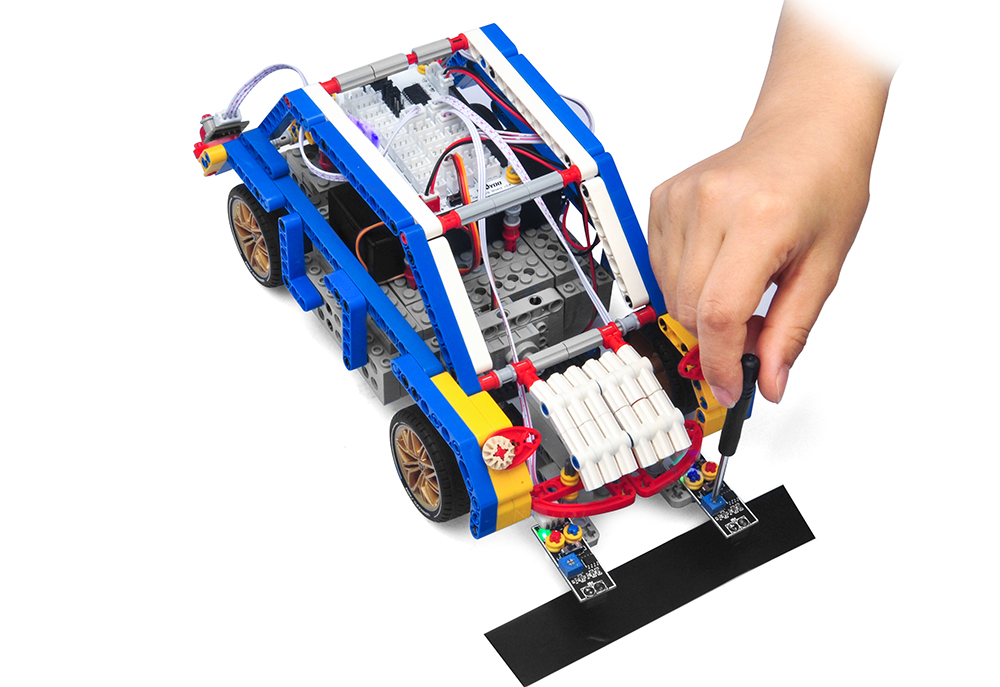
Schalten Sie das Fahrzeug ein, halten Sie es fest und stellen Sie das Potentiometer am Spursensor mit einem Kreuzschraubenzieher ein, bis Sie den besten Empfindlichkeitsstatus erreicht haben: Die Signalanzeige-LED erlischt, wenn sich der Sensor über weißem Boden befindet, und die Signal-LED leuchtet auf, wenn sich der Sensor über einer schwarzen Spur befindet.

1. bereiten Sie eine schwarze Schiene (die Breite der schwarzen Schiene ist mehr als 20mm und weniger als 30mm) auf weißem Grund vor. Bitte beachten Sie, dass der Biegewinkel der Schiene nicht größer als 30 Grad sein darf. Wenn der Winkel zu groß ist, fährt das Auto aus der Spur.
2. Stellen Sie das Auto auf die Schiene, schalten Sie den Schalter des OSOYOO Motor Shields und den Schalter der Batteriebox ein, das Auto fährt auf der schwarzen Schiene.
Hinweis: Wenn sich das Auto nicht wie oben beschrieben bewegt, sollten Sie die Kabelverbindung des Tracking-Sensors und die Batteriespannung (muss über 7,2 V liegen) überprüfen.
3. Wenn Sie den rechten oder linken Winkel ändern wollen, bearbeiten Sie bitte die folgende Zeile des Codes und laden Sie die Skizze erneut hoch:
int RIGHT=FRONT-70;
int LEFT=FRONT+70;
4. Wenn Sie die Geschwindigkeit des Autos ändern wollen, überarbeiten Sie bitte den folgenden Code des Sketches (Hinweis: der maximale Wert ist 255)
#define SPEED 190
#define HI_SPEED 220