
Überblick
Das OSOYOO Motor Shield basiert auf dem L293DD (Datenblatt), einem monolithischen, integrierten Hochspannungs-, Hochstrom-Vierkanal-Treiber, der für Standard-DTL- oder TTL-Logikpegel ausgelegt ist und induktive Lasten (wie Relais, Solenoide, Gleichstrom- und Schrittmotoren) sowie Schalttransistoren steuern kann. Zur Vermeidung von Boardschäden sind alle Treiberleitungen gegen Rück-EMK diodenbeschützt. Die maximale Versorgungsspannung, die von diesem Board unterstützt wird, beträgt 20V.
Es verwendet einen L293DD-Chip, der einen Ausgangsstrom von bis zu 1,2 A pro Kanal liefert. Es erfordert eine Stromversorgung von 6 V bis 15 V, um den Motor zu betreiben, und verfügt auch über einen integrierten 5-V-Spannungsregler zur Stromversorgung des Treiberchips. Es ermöglicht Ihnen, zwei Gleichstrommotoren mit Ihrem Arduino-Board zu steuern, wobei Sie die Geschwindigkeit und Richtung jedes Motors unabhängig voneinander kontrollieren können.
Du kannst den UNO R3 Mikrocontroller verwenden und externe Komponenten hinzufügen, um eine Vielzahl von erstaunlichen Experimenten durchzuführen, wie z.B. Smart Robot DIY. Wenn du deinen Roboter selbst baust, ist es notwendig, die Motor Driver Board zu verwenden, um die Gleichstrommotoren anzutreiben, jedoch muss man manchmal das Motor Driver Board mit vielen Jumper-Kabeln an den UNO anschließen, was ziemlich umständlich ist.
Das Motor Shield kann direkt vom Arduino oder von einer externen Stromquelle mit Strom versorgt werden. Es wird dringend empfohlen, eine externe Stromversorgung für das Motor Shield zu verwenden.
Diese Platine bietet auch Richtungs-LED-Indikatoren für beide Kanäle und dies ist während der Einrichtungsphase sehr nützlich, um das Firmware-Verhalten zu überprüfen. Die LED-Indikatoren funktionieren auch ohne einen echten Motor an den Ausgängen anzuschließen.
Eigenschaften
- Standard-Pinbelegung für UNO Shield
- Basierend auf dem L293DD-Motortreiberchip
- Ansteuerung von 2 Gleichstrommotoren oder 1 Schrittmotor
- Externe Stromversorgung verfügbar
- Externer Stromschalter
- RST-Knopf
- 5V/3.3V/GND Stromschnittstellen
- Motortreiber-Stromschalterjumper
- Hardware-UART-Schnittstelle/Software-UART-Schnittstelle
- Sensorschnittstellen
- Alle GPIO-Pins
- Motorspezifische bequeme Verkabelung über Jumper
- 4 Richtungsanzeigeleuchten
- Kühlkörper für bessere Leistung
- WiFi-IoT-Add-On-Funktion in Verbindung mit dem OSOYOO WIFI-Modul (https://osoyoo.com/2020/12/20/osoyoo-esp8266-wi-fi-module/)
- Bluetooth-Funktion in Verbindung mit dem HC-02-Bluetooth-Modul (https://osoyoo.store/products/hc02-bluetooth-module-for-osoyoo-robot-car?variant=22561056948342)
VORSICHT: Der Treiber-IC und der Kühlkörper können sehr heiß werden, wenn mit Strömen über 1000mA gearbeitet wird.
Spezifikationen
- Logischer Teil der Eingangsspannung VD: 5V
- Eingangsspannung (empfohlen): 7 ~ 12V
- Eingangsspannung (Grenze): 6-20V
- Logischer Teil des Arbeitsstroms Iss: <36mA
- Ansteuerteil des Betriebsstroms Io: 1,2A
- Maximale Verlustleistung: 25W (T = 75 Celsius)
- Steuersignal-Eingangspegel: Hoch 2,3V, Niedrig -0,3V
- Betriebstemperatur: -25 bis +130 Celsius
- Schraubklemmenstecker: 5,0-mm-Raster
- Gurtclip und kann über den Frontzugangssignal gesteuert werden
- Antriebstyp: Dual-Power-H-Brücken-Treiber
- Pin-Belegung: D7 ~ D10 direkte Motoransteuerung
- Unterstützt PWM/PLL-Modus zur Motorsteuerung
- Gewicht 29 g
- Abmessungen 68,5 x 53 mm
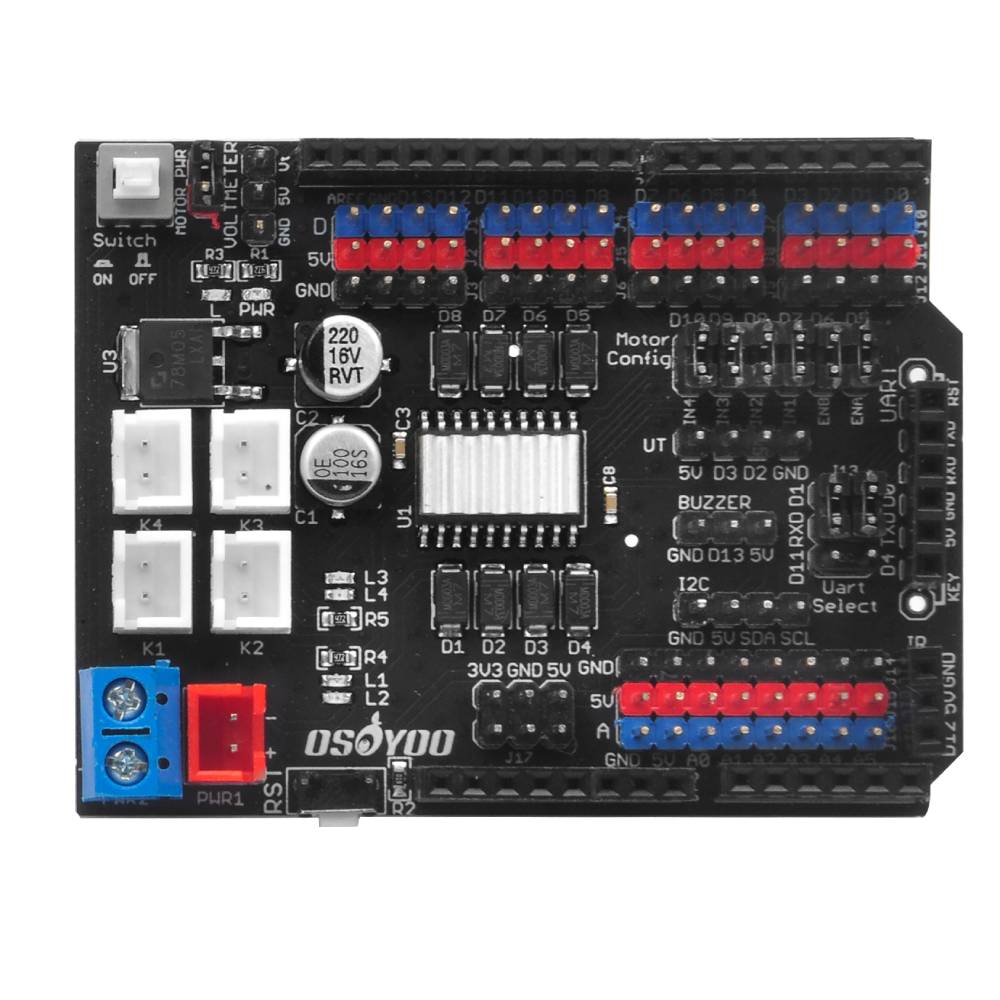
Hardware-Übersicht
- Ein-/Aus-Schalter: Steuert die externe Eingangsstromversorgung; Drücken Sie den Schalter, um die Stromversorgung einzuschalten, drücken Sie erneut, um die Stromversorgung auszuschalten.
- Motor-PWR-Jumper: Verbinden Sie die Jumperkappe, um den Motorantriebschip normal arbeiten zu lassen; entfernen Sie die Jumperkappe, um den Betrieb zu stoppen.
- VOLTMETER-Schnittstelle: Dreidrahtige digitale Voltmeter-Schnittstelle, zeigt die Spannung der externen Stromversorgung an.
- Digital-Pin-Out: Führen Sie digitale Signal-Schnittstellen aus.
- L-Anzeige: Verbindet mit dem Arduino-Pin D13.
- PWR-Anzeige:
- Motor-Konfigurations-Jumper: Wenn der Jumper verbunden ist, wird der Steuerungs-Pin des Motorchips standardmäßig mit dem entsprechenden Arduino-IO-Port verbunden. Wenn nötig, können Sie auch die Jumperkappe entfernen und andere Arduino-IO-Ports über Dupont-Kabel verbinden, um den Motor zu steuern.
Motor IN1 – Arduino D7
Motor IN2 – Arduino D8
Motor IN3 – Arduino D9
Motor IN4 – Arduino D10
Motor ENA – Arduino D5
Motor ENB – Arduino D6
- Motor-Schnittstelle: K1 und K2 (K3 und K4) können mit einem Gleichstrommotor Motor A (B) verbunden werden.
- L293DD-Motorantriebschip
- Motor-Drehrichtungsanzeiger
- Externe Stromversorgungsbuchse (Blaue Stromversorgungsbuchse / XH2.54 Stromversorgungsbuchse): Externe Stromversorgung für Motor Shield, Bereich 6-15V.
- Reset-Taste: Zum Zurücksetzen des Shields und des Arduinos drücken.
- Analog-Pin-Ausgang
- Sensor-Schnittstellen: Zur vereinfachten Verdrahtung haben wir entsprechende Schnittstellen für gängige Sensoren entworfen und mit den Signal-Pins von Arduino verbunden.
- IR-Schnittstelle: Sie können den IR-Empfänger in diese Schnittstelle einstecken, damit das Board IR-Signale empfangen kann. Der Signalport ist standardmäßig mit D12 von Arduino verbunden.
- Uart-Schnittstelle: Verbinden Sie mit den Pins, die die serielle Kommunikation auf Arduino ermöglichen.
- J13 Uart-Selektor: J13 bietet eine bequeme Möglichkeit, die Uart-Schnittstelle einzurichten. Sie können Jumperkappen verwenden, um TXD und RXD des Uart-Ports mit D4 und D11 zu verbinden, das heißt, den Softserial-Port zur Kommunikation mit dem angeschlossenen Gerät zu verwenden. Sie können es auch als Hardserial-Port einrichten, indem Sie die Jumperkappen auf die D0/D1-Seite setzen. Der Hardserial-Port wird standardmäßig verwendet. Wenn Sie andere Pins verwenden müssen, können Sie die Jumperkappen entfernen und Jumper verwenden, um TXD & RXD mit den Pins zu verbinden, die die serielle Kommunikation auf Arduino ermöglichen.
- Fritzing Part File Download: https://osoyoo.com/picture/V2.0_Model_3_Robot/Motor-shield-V1.0.fzz.zip








