Es gibt viele Möglichkeiten, das Raspberry Pi Robot Car über das Internet zu steuern. In diesem Projekt stellen wir eine beliebte Methode vor, nämlich die Installation eines Webservers auf dem Raspberry Pi. Mit anderen Worten, wir können unser Pi-Board in eine Website verwandeln und Browse oder die Handy-APP verwenden, um Daten mit Raspberry Pi auszutauschen.
Nein.
Bild
Gerät
Qty.
Zubehör
Verbinden
1
Tracking-Sensor-Modul
1
M2.5 Kunststoffschraube x 2
M2.5 Kunststoffmutter x2
M2.5 Kunststoffsäule x 2
Schritt 1: Installieren Sie das Grundgerüst des intelligenten Autos gemäß Lektion 2. Wenn Sie Lektion 3 abgeschlossen haben, können Sie sie einfach beibehalten
Schritt 1) Stellen Sie sicher, dass Sie rpi.gpio und die Bibliothek adafruit-pca9685 installiert haben, aktivieren Sie I2C in Lektion 1 und schalten Sie das Roboterauto ein.
Schritt 2) Laden Sie die Installations-Shell-Skriptdatei herunter, indem Sie den folgenden Befehl eingeben:
Nachdem Sie die obigen Befehle ausgeführt haben, installieren Sie die Python-Flask-Bibliothek und erstellen automatisch ein Verzeichnis namens pi-webserver und zwei Unterverzeichnisse unter pi-webserver, die static und templates sind, die Struktur ist wie folgt:
Das pi-webserver-Verzeichnis speichert unsere Python-Codedatei, das statische Verzeichnis speichert die CSS-Datei und der Vorlagenordner speichert HTML-Dateien. Wenn Sie nicht wissen, was HTML, CSS-Datei ist, spielt es keine Rolle.
Schritt 4) Führen Sie den Code aus, indem Sie den folgenden Befehl eingeben:
sudo python ~/pi-webserver/pi-webserver.py
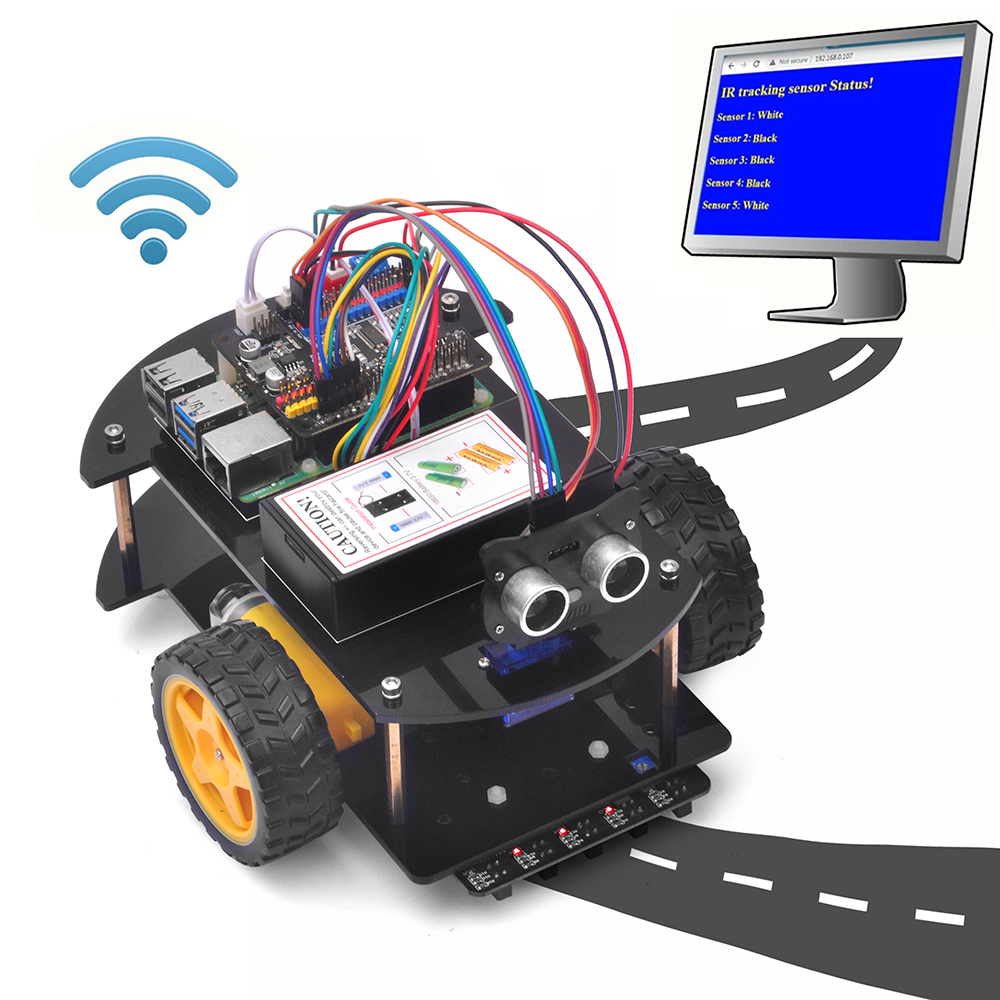
Schritt 5) Ihr Python-Flask-Webserver wird gestartet. Öffnen Sie nun auf Ihrem PC oder Mobiltelefon, das dasselbe Wi-Fi-Netzwerk wie Ihr Raspberry Pi ist, den Browser und besuchen Sie http://your_raspberry_pi_ip_address:5000 (in meinem Fall http://192.168.0.107:5000), Sie sehen den Status Ihrer 5 Tracking-Sensoren in Ihrem Browser:
Der Sensorstatus wird alle 5 Sekunden aktualisiert, wenn Sie also die schwarze Linie unter andere Sensoren setzen, ändert sich der Sensorwert auf der obigen Webseite nach 5 Sekunden.