In dieser Lektion zeigen wir Ihnen, wie Sie eine mobile APP verwenden, um ein Roboterauto über das UDP-Protokoll zu steuern. Der Raspberry Pi führt ein Python-Programm aus, um ein UDP-Paket von APP zu erhalten.
Sie lernen, wie Sie Python verwenden, um Remote-Daten (UDP-Pakete) von der mobilen APP abzurufen.
Schritt 1: Installieren Sie das Smart Car Grundgerüst wie in Lektion 3 beschrieben. Wenn Sie das Tracking-Sensormodul nicht installieren, schließen Sie die Installation bitte in Lektion 2 ab.
Schritt 1) Stellen Sie sicher, dass Sie rpi.gpio und die Bibliothek adafruit-pca9685 installiert haben, und aktivieren Sie I2C in Lektion 1.
Schritt 2) Schalten Sie das Roboterauto ein und geben Sie den folgenden Befehl ein, um den Beispielcode herunterzuladen:
Schritt 3) Geben Sie den folgenden Befehl ein, um den Beispielcode auszuführen:
python picar-udp-control4.py
Nachdem die obige Python ausgeführt wurde, wartet Ihr Auto auf den Befehl von Ihrem Handy.
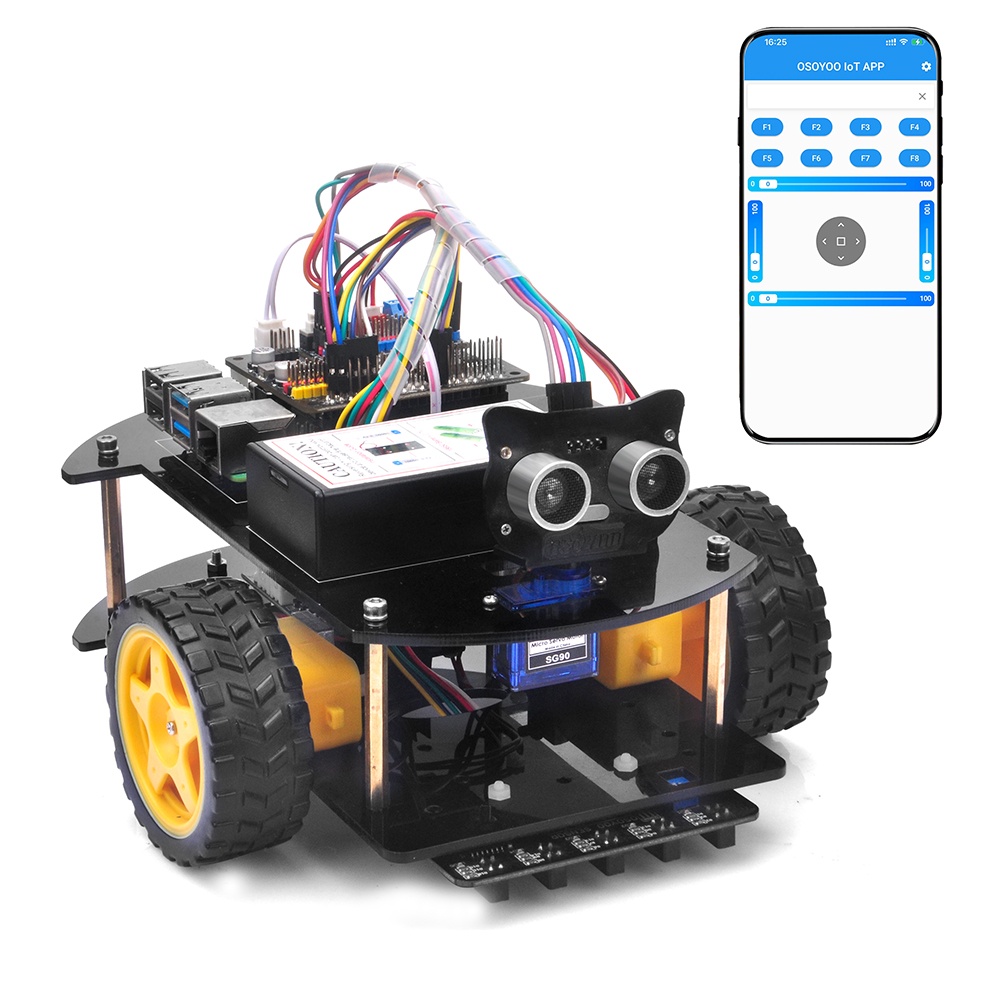
Schritt 4) Laden Sie die OSOYOO Wi-Fi UDP Robot Car Control APP herunter Suchen Sie bei Google Play oder im Apple Store nach den Schlüsselwörtern “OSOYOO IoT UDP Robot APP”, Sie finden eine rote Symbol-APP wie folgt (Hinweis: Wenn Sie diese APP nicht in Google Play finden können, können Sie die APP direkt über den folgenden Link herunterladen: https://osoyoo.com/driver/udp-app.apk):
Schritt 5) Verbinden Sie Ihr Telefon mit dem gleichen Router Wi-Fi SSID des Raspberry Pi verwenden. Öffnen Sie die APP, klicken Sie auf das Einstellungssymbol (1), um die Einstellungsoberfläche aufzurufen, geben Sie Ihre [Raspberry Pi IP address] und [Port] auf [8888] ein, klicken Sie auf [Save], und klicken Sie dann auf das Zurück-Symbol (5), um die Benutzeroberfläche wie folgt zu steuern:
Schritt 6)
Stellen Sie nun das Auto auf den Boden und klicken Sie auf die Richtungstasten < > ^ v, um das Auto in Bewegung zu setzen. Verwendung || Pause-Taste, um die Bewegung des Fahrzeugs zu stoppen.
Wenn Sie auf die Hindernistaste (F8) klicken, führt das Auto eine automatische Hindernisvermeidung durch, ähnlich wie in Lektion 3
Wenn Sie auf die Tracking-Taste (F7) klicken, führt das Auto ein automatisches Link-Tracking-Fahren aus, ähnlich wie in Lektion 2
Hinweis: F1~F6 sind weitere Entwicklungsfunktionen in der Zukunft.
FAQ zur IoT UDP APP und Sketch Code:
Frage 1)Wie kann man die Geschwindigkeit des Roboterautos einstellen? A: Wenn Sie die Geschwindigkeitsleistung des Roboterautos ändern möchten, ändern Sie bitte die folgenden Werte in Zeile 19-21 in picar-udp-control.py Datei:
high_speed = 4000 # Max pulse length out of 4096
mid_speed = 2000 # Max pulse length out of 4096
low_speed = 1000 # Max pulse length out of 4096
Frage 2)Was passiert, wenn Sie Tasten in der OSOYOO IoT UDP Robot APP drücken? A: Wenn Sie eine Taste der APP drücken, sendet die APP eine Nachricht mit einem Buchstaben über das UDP-Protokoll an das Zielgerät Raspberry Pi
Knopf
UDP-Nachricht
Formel 1
/
Formel 2
/
Formel 3
/
Formel 4
/
Formel 5
/
Formel 6
/
▲
Vorrücken
▼
Zurück
►
Rechts
◄
Links
Quadrat
Aufhören
Formel 7
Verfolgung
Formel 8
Hindernis
Frage 3)Wie geht das Raspberry Pi-Python-Programm mit dem UDP-Befehl um?
Die Zeilen 290 bis 318 während die Schleife UDP-Daten von APP empfängt und an brauchbare cur_status weitergibt, behandelt die Tickerfunktion in den Zeilen 266 – 280 die cur_status :
def ticker():
if cur_status=='R':
turnRight(high_speed,0)
if cur_status=='L':
turnLeft(0,high_speed)
if cur_status=='A':
forward(mid_speed,mid_speed)
if cur_status=='B':
backward(mid_speed,mid_speed)
if cur_status=='E':
stopcar()
if cur_status=='T':
line_tracking()
if cur_status=='O':
obstacle_avoid()
Wenn beispielsweise die Taste APP ▲ gedrückt wird, ist cur_status Wert A, dann ruft die Funktion ticker() die Funktion forward(mid_speed,mid_speed) auf, um das Auto vorwärts zu bewegen.