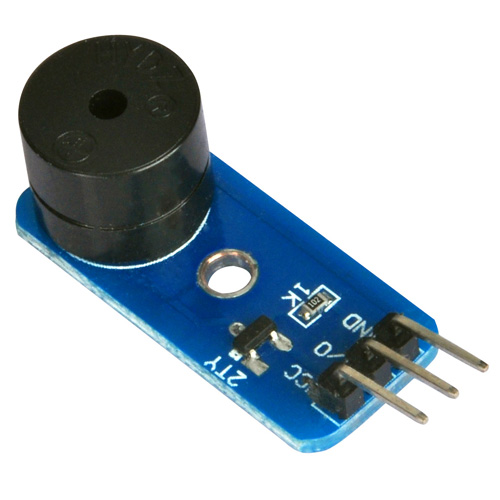
In dieser Lektion müssen Sie Lektion 4 abschließen, bevor Sie mit dieser Lektion fortfahren. Wir verwenden das Ultraschallmodul, um Hindernisse zu “sehen” und die Entfernung zu messen. Wenn die Entfernung kleiner als der vordefinierte Schwellenwert ist, gibt der Summer ein Signalton von sich und das Auto dreht sich automatisch vom Hindernis weg.
Hardware Installation
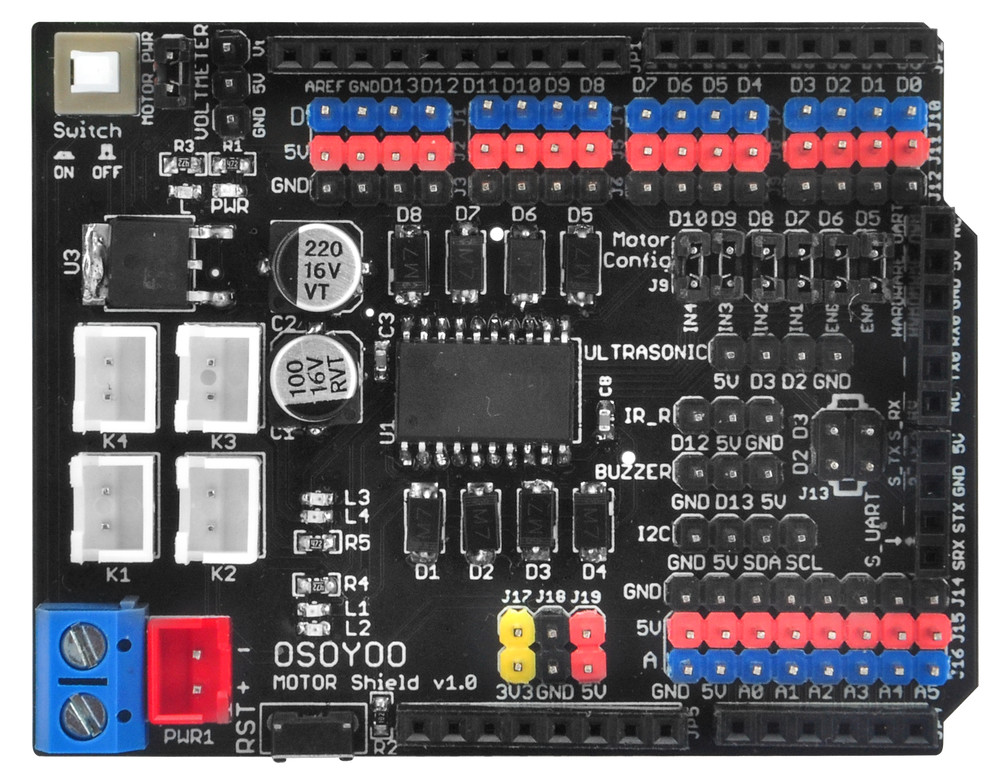
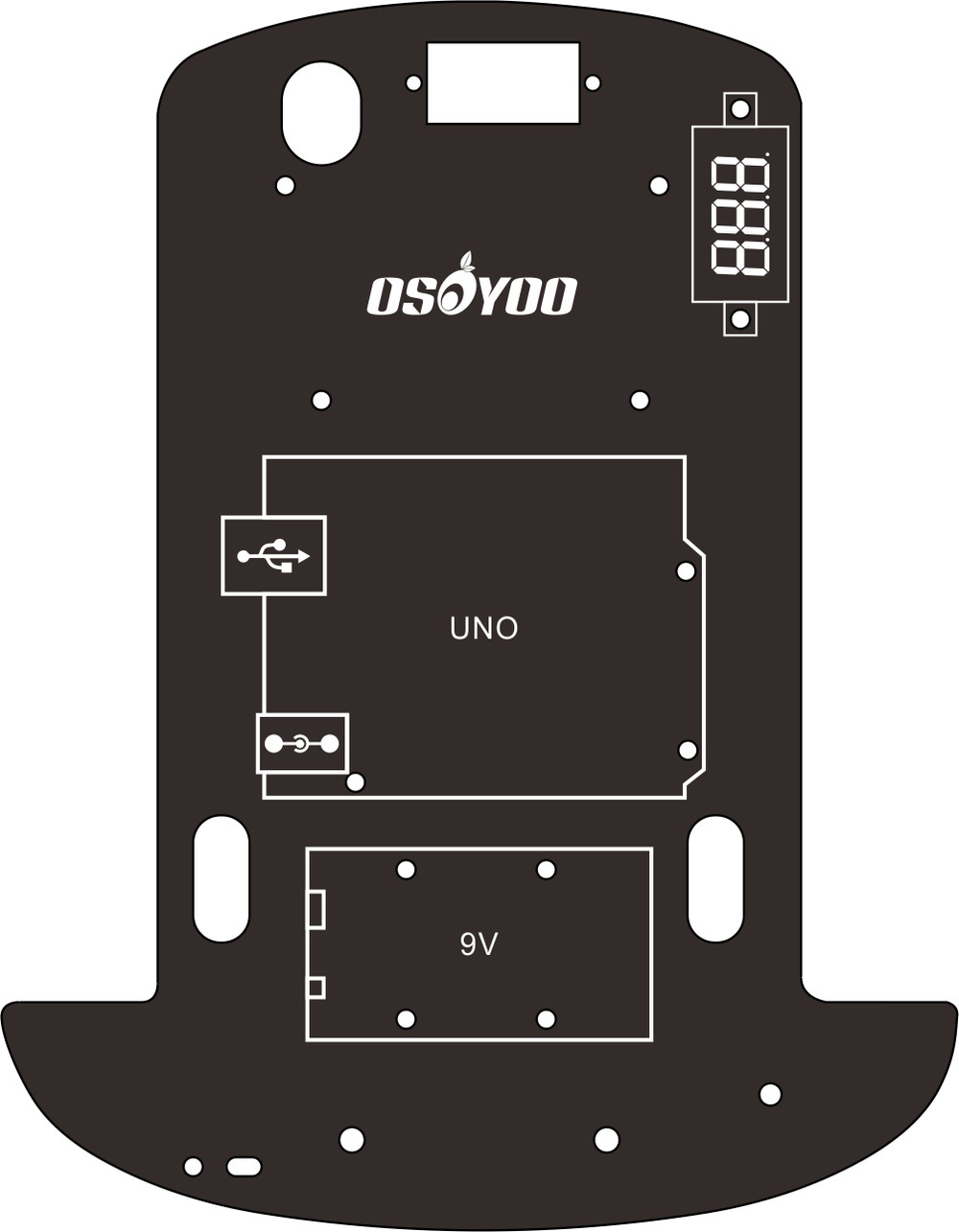
Installieren Sie das Smart Car Basic Framework gemäß Lektion 4. Wenn Sie die Installation bereits in Lektion 4 abgeschlossen haben, belassen Sie sie einfach so.
Laden Sie Lesson 5 simple code , herunter, entpacken Sie sie und Sie sehen einen Ordner namens lesson5.
SCHRITT 3:
Verbinde das OSOYOO Basic Board für Arduino mit einem USB-Kabel mit dem PC, öffne die IDE -> klicke auf Datei -> klicke auf Öffnen -> wähle den Code “lesson5.ino” im Ordner “lesson5” aus, lade den Code auf das Board.
Hinweis: Schalten Sie Ihre Batterie aus oder ziehen Sie Ihren Netzadapter aus, wenn Sie den Sketch-Code auf das OSOYOO Basic Board für Arduino hochladen.
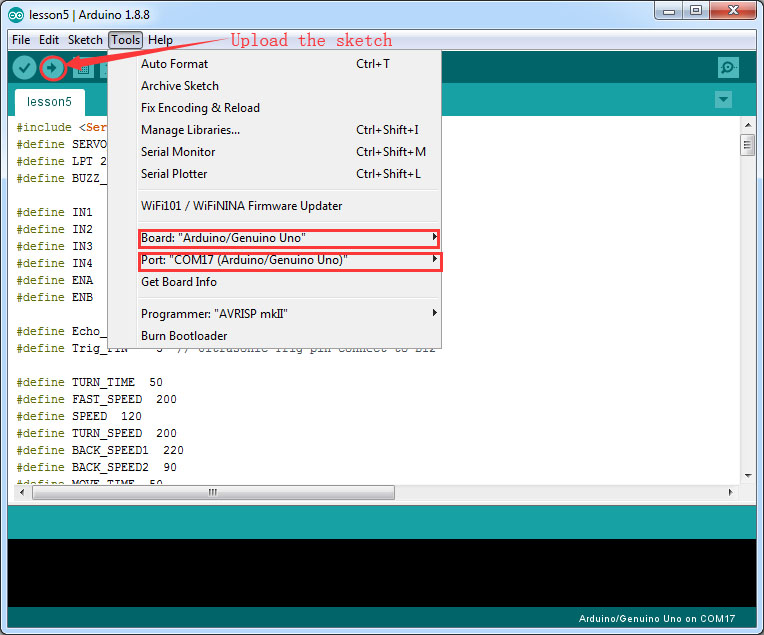
SCHRITT 4:
Wähle das entsprechende Board und den Port für dein Projekt aus und lade den Sketch auf das Board hoch.
SCHRITT 5:
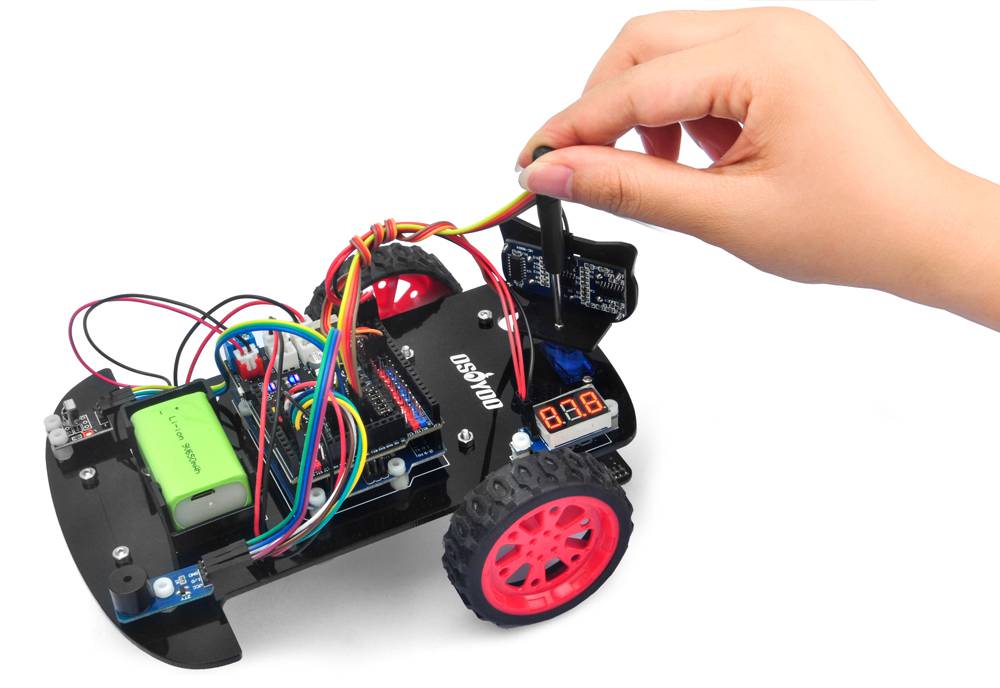
Initialausrichtung des Ultraschall-Sensorservos
Nach dem Einschalten des Autos hören Sie einen langen Signalton, dann wird sich das Servo etwas bewegen und schließlich für 5 Sekunden in eine Richtung stehen bleiben.
Während dieser ersten fünf Sekunden müssen Sie sicherstellen, dass der Ultraschallsensor (zwei Augen) geradeaus gerichtet ist.
Wenn er nicht geradeaus gerichtet ist, sollten Sie das Auto sofort ausschalten, den Sensor vom Servo entfernen, ihn erneut installieren und in gerader Richtung nach vorne ausrichten, wie auf dem Bild unten gezeigt. Andernfalls funktioniert das Hindernisvermeidungsprogramm nicht ordnungsgemäß.
Nach der Ausrichtung des Sensors schalten Sie das Auto wieder ein. Nach dem langen Signalton sollte der Sensor genauso wie auf dem Bild nach vorne gerichtet sein. Wenn er nicht geradeaus gerichtet ist, schalten Sie das Auto aus und führen Sie die Richtungsausrichtung erneut durch.
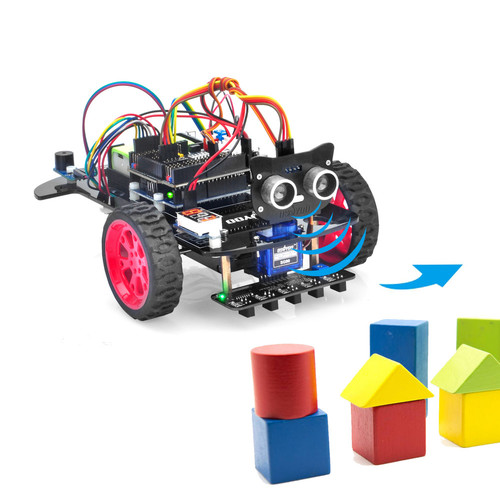
Testen:
Schalten Sie das Auto ein, wenn das Ultraschallmodul in die Frontansichtsposition gedreht wird, bedeutet das, dass Sie die Position des Sensors nicht mehr anpassen müssen. Warten Sie einfach 5 Sekunden. Wenn kein Hindernis erkannt wird, fährt das Auto vorwärts. Wenn ein Hindernis erkannt wird, stoppt das Auto, das Ultraschallmodul dreht sich von rechts nach links, um umliegende Hindernisse zu erkennen. Der Roboterwagen entscheidet, ob er nach links abbiegen, nach rechts abbiegen oder rückwärts fahren soll, basierend auf den Daten zur Hinderniserkennung und unserem Hindernisvermeidungsalgorithmus.
Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
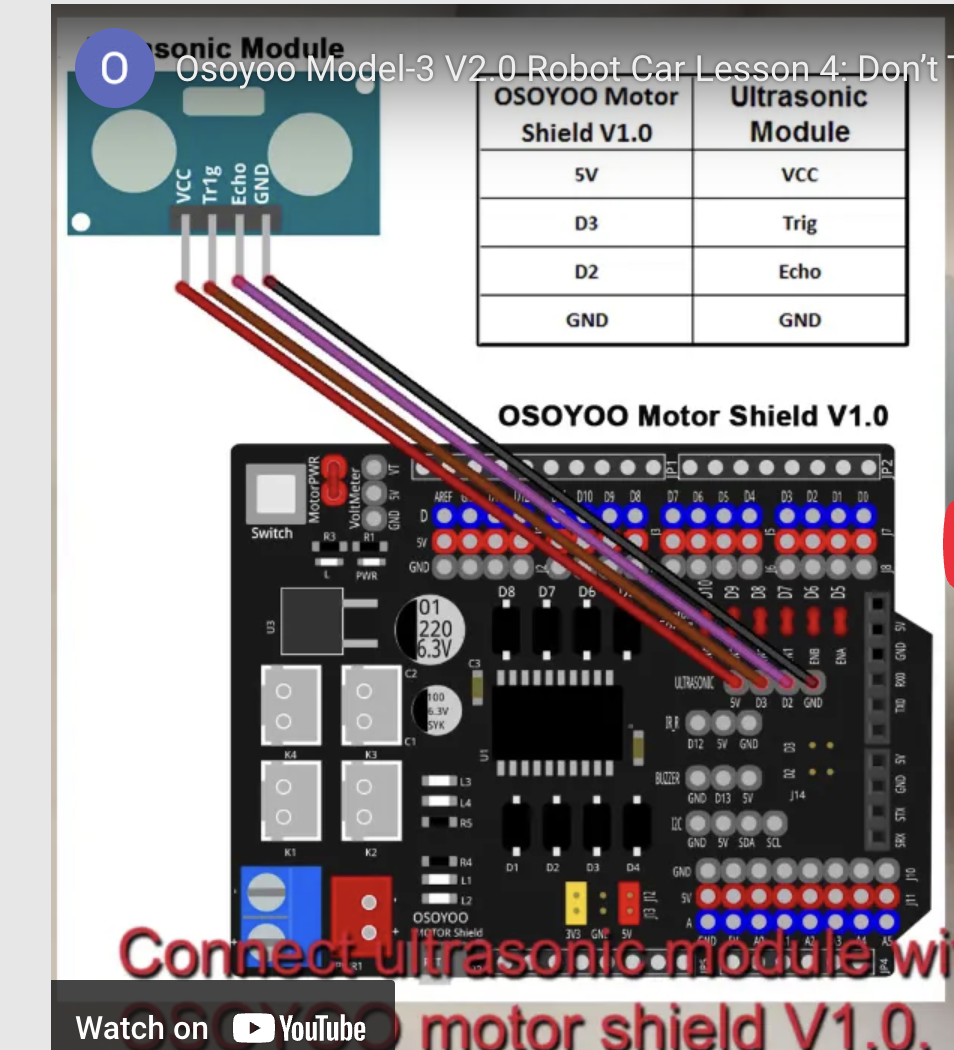
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.





























Please help. The car works when it is plugged into computer, but when I unplug it I guess the battery can not handle the power and the car barely works
Do you use the battery in the package. When you test the lesson1, does the car work well? please take a photo and send to my email address: [email protected]
bonjour je ne comprend pas la voiture tourne sa tête mais au lieu d’avancer, elle recule de plus elle ne répond plus a la télécomande Merci
If you meet this problem in the lesson Obstacle avoidance, please check the wires on Ultrosonic Sensor or change another Ultrosonic Sensor
Hi, when i did this lesson the car kept on moving back without doing anything and the car when i plug it in my computer it trys to move back
Hi, the robot is just seeing obstacles everywhere? So it scans around, then turns 90 degrees eternally – what’s wrong here?
Do you mean that the car alway turns around even if there is no obstacle in the front side? If yes, this means the ultrasonic sensor signal was not sent to the Arduino board(one of the 4 wires in the ultrasonic sensor is broken). Please remove the 4 wires which connect ultrasonic sensor to UNO board, then please 4 new wires to connect the sensor to uno board as per following picture:
Don’t you guys have a mblock graphic programming for this one like the one for the Model T. Would be very didactic for the little kids.
Thanks
We don’t have mBlock graphic programming sample for this car. But if you order more than 100 sets, we can design such graphic programming tutorial for you.