Das Handbuch kann über folgenden Link geladen werden:
Inhalt
Autorisierte Online-Händler
| Buy from USA |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
Buy from JP |
 |
 |
 |
 |
 |
 |
 |
Einleitung
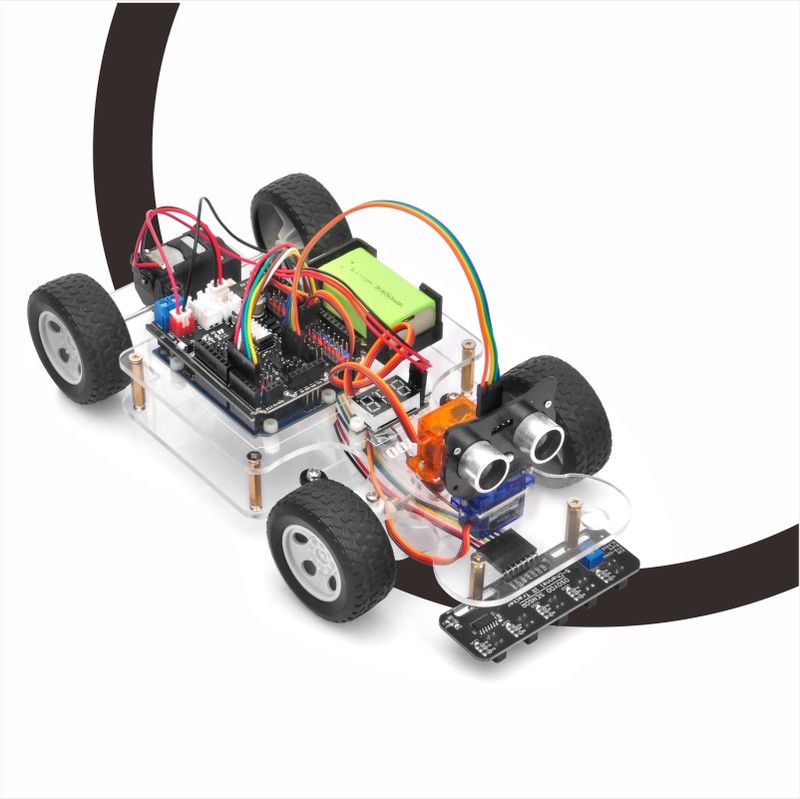
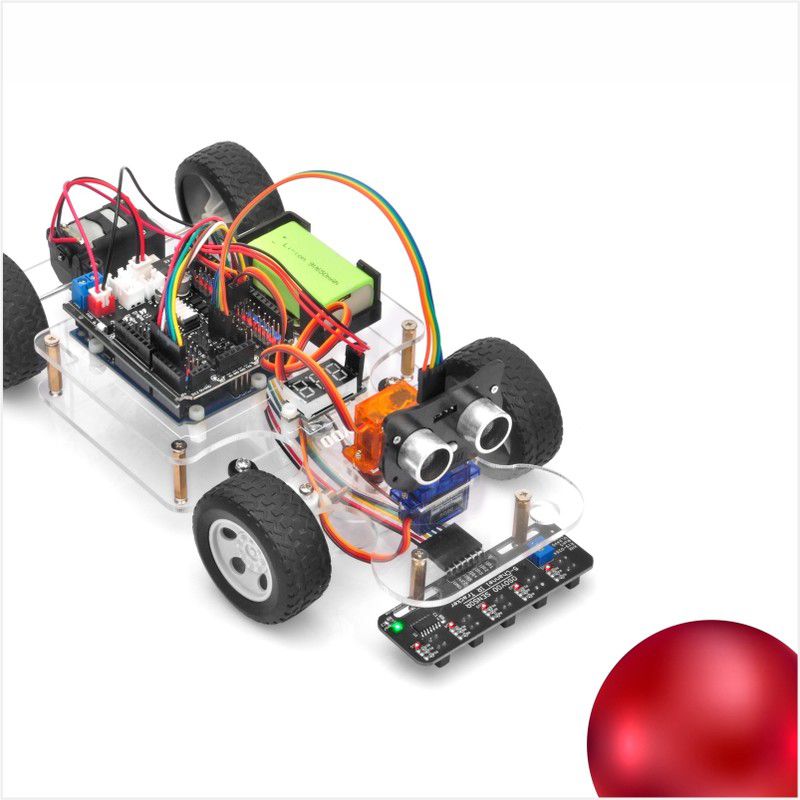
Das OSOYOO Sport Car Kit für Arduino ist ein MINT-Bildungspaket mit großem Spaßfaktor und basiert auf dem Arduino-kompatiblen OSOYOO R3 MCU Board. Es wurde für Anfänger und für Fortgeschrittene zum Lernen auf den Gebieten von Elektronik, Programmierung und Roboter-Mechanik entwickelt.
Unser Tutorial mit Text und Videos bietet einen einfach nachvollziehbaren Leitfaden zum Aufbau eines eigenen, selbstfahrenden Roboterautos und zu dessen Programmierung. Die Tutorials führen vom mechanisch-elektrischen Fahrzeugaufbau und der ersten Software-Installation weiter über die Realisierung von Spurverfolgungs- und Hindernisausweich-Funktionen bis zur Fahrzeug-Fernsteuerung über Bluetooth und Wifi.
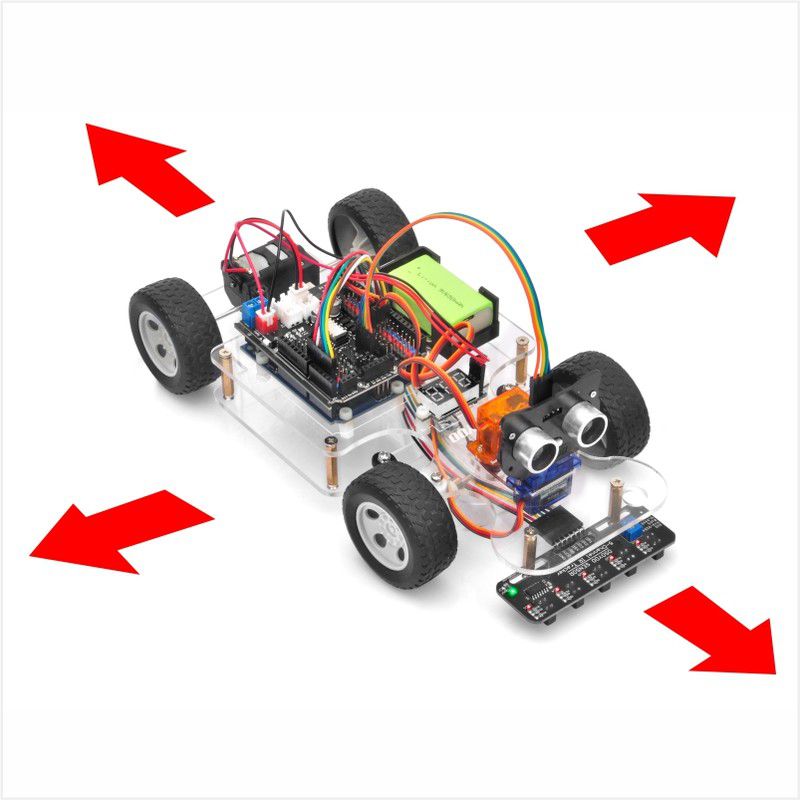
Das OSOYOO Sport Car Kit Roboterauto ist zu aktuellen Straßenfahrzeugen ähnlich mit Achsschenkellenkung und Hinterradantrieb aufgebaut; die OSOYOO Sport Car Servo-Lenkung sorgt im Vergleich zur bei vielen anderen Roboterautos genutzten „Kettenfahrzeug-Lenkung“ für ein sehr gutes Lenkverhalten.
Und – falls sich Ihre Kinder, Familie oder Freunde für die Welt der Programmierung, Elektronik und Robotik interessieren, dann könnte unser OSOYOO Sport Car Kit für Arduino ein ideales Geschenk für sie sein, eventuell auch für ein mit Ihnen gemeinsames Projekt.

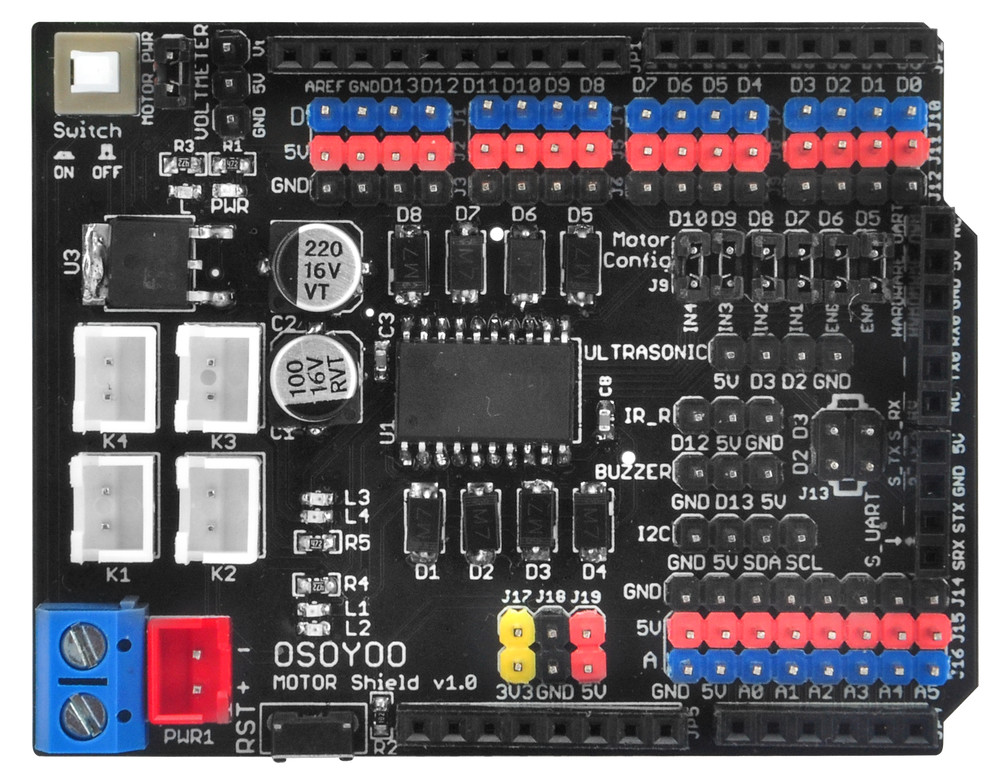
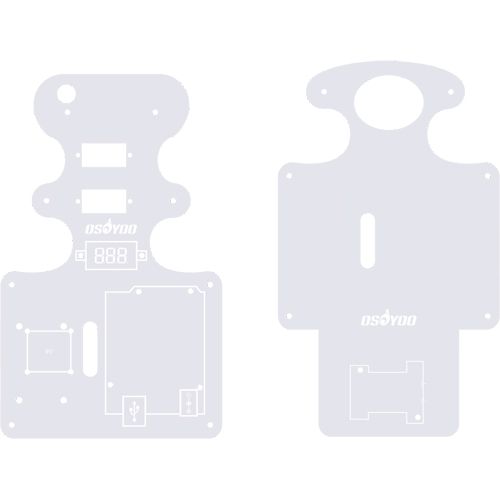
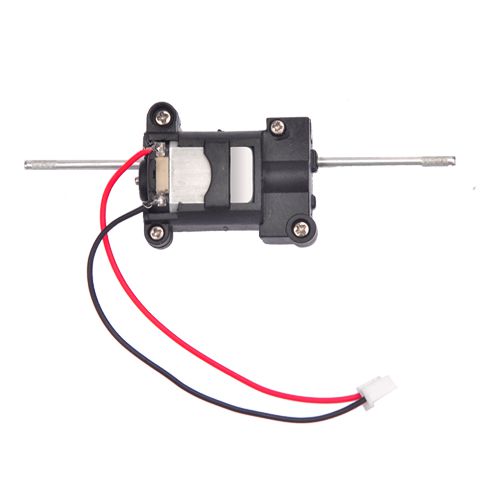
Teile und Baugruppen
Tutorial und Beispielprojekte:






























having bought and assembled this car about two weeks ago I’m puzzled to find this car slowing down (almost stopping) when turning left (bluetooth) and the voltage meter reading going from 9.0 to 3.something. This also holds true when putting the device on a stand und letting the whells run freely. II’ve checked the wiring and mechanical setup multiple times and couldn’t find any issue. On turning to the right everythings works fine as well as going forward.
Do you have any suggestions what may be the cause for that behavior and how to remedy that?
With Kind Regards
Jochen Seidel
hi, Jochen,
When your car make left turn, make sure the front wheel is not stuck by the chassis. Sometimes improper installation of the front steering system might cause wheels touching the chassis when making left turn(or right turn). In such cases, the car will consume huge current to overcome the resistance. The voltage will reduce sharply when current is increasing.
If you found that the front left wheel is touching any part of chassis during left turn, you have two solutions:
1) Adjust the screws of the steering system, don’t let the front wheel to touch chassis at any time.
2)Change the code, reduce the left turn angle. For example , original left turn and Sharp_left angles are defined as following:
int LEFT=FRONT-25;
int SHARP_LEFT=FRONT-35;
Please change above value to:
int LEFT=FRONT-20;
int SHARP_LEFT=FRONT-30;
Above code change will reduce the Left turn angle by 5 degree. If the the wheel still touches chassis when left turn, you can change the -20 to -15 and -30 to -25 , then try again.
Hope this helps.
Thank you very much for providing such detailed insights! I will certainly share this invaluable information with my colleagues and peers, as I believe they will greatly benefit from your expertise.