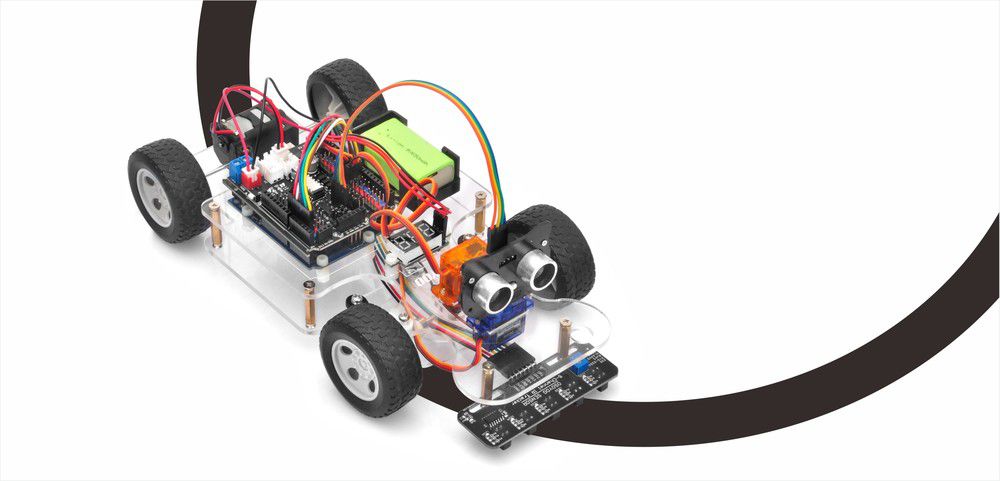
In dieser Lektion benutzten wir den 5-Spur Linienfolgesensor um das OSOYOO Sport Car für Arduino automatisch eine schwarze Spurlinie auf weißem Grund abfahren zu lassen.
Wenn Du den Fahrzeugaufbau noch nicht abgeschlossen hast, folge bitte dem Tutorial in Lektion 1
Bitte sieh Dir neben dem Tutorial-Text auf jeden Fall auch das Erklär-Video an – viele kleine Tipps und Tricks kannst Du Dir dort einfach abschauen.
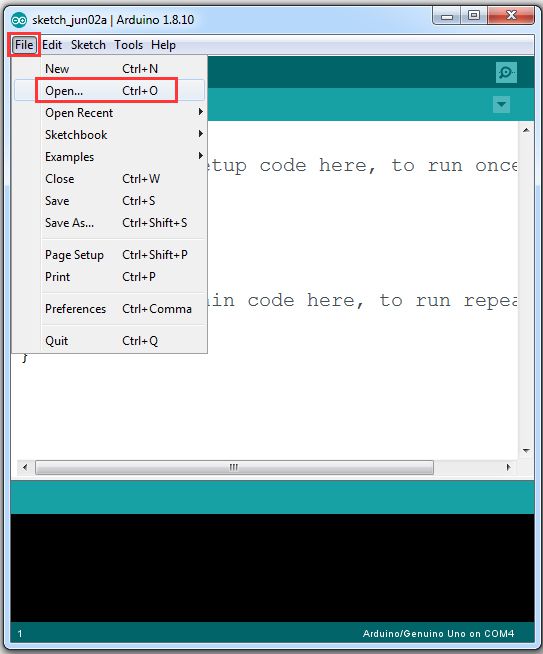
Schritt 1: (Falls Du bereits eine Arduino IDE größer als Version 1.1.16 auf Deinem Computer installiert hast, überspringe bitte diesen Punkt.) Installiere die aktuelle Arduino IDE. Lade die Arduion IDE von https://www.arduino.cc/en/Main/Software?setlang=en auf Deinen Computer, dann installiere die Software. Schritt 2: Lade den Lektion 3 Beispiel Code , entpacke das geladene File sg90car-lesson3.zip, wechsle in den Ordner sg90car-lesson3 . Schritt 3: Verbinde das UNO R3 Board über das USB-Kabel mit dem PC, starte die Arduino IDE -> klick File -> click Open -> wähle “sg90car-lesson3.ino” im sg90car-lesson3 Ordner und lade den Sketch-Code in den Editor. Hinweis: Vor Hochladen eines Sketches auf den OSOYOO Basic Board for Arduino trenne bitte die Verbindung zur Batterie.
Schritt 4: Bitte ändere den Vorgabewert 90 in Zeile 22 auf den von Dir in Lektion 1 ermittelten FRONT Wert. Wenn Du den Lenk-Servo entsprechend Option 1 in Schritt 5 von Lektion 1 ausgerichtet hast, überspringe bitte diesen Schritt.
#define FRONT 90 // steering to front
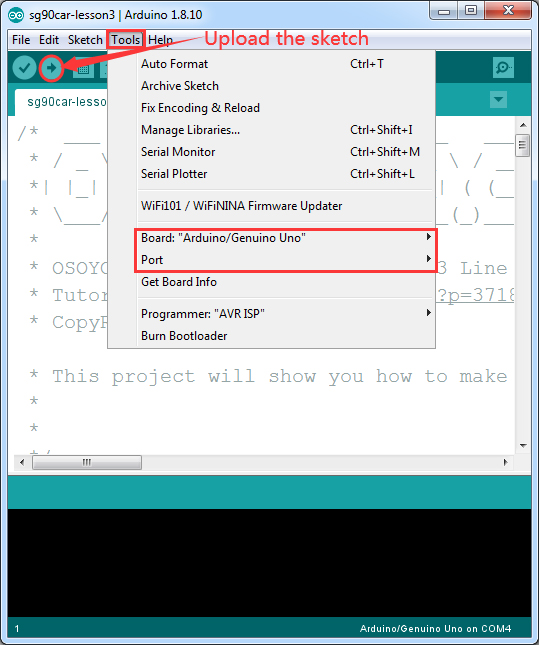
Schritt 5: Wähle das Roboterauto Board (Arduino Uno) und den von Deinem Computer benutzten COM-Port (den findest Du unter Port) und lade mit der Pfeiltaste den Sketch auf das OSOYOO Basic Board for Arduino.
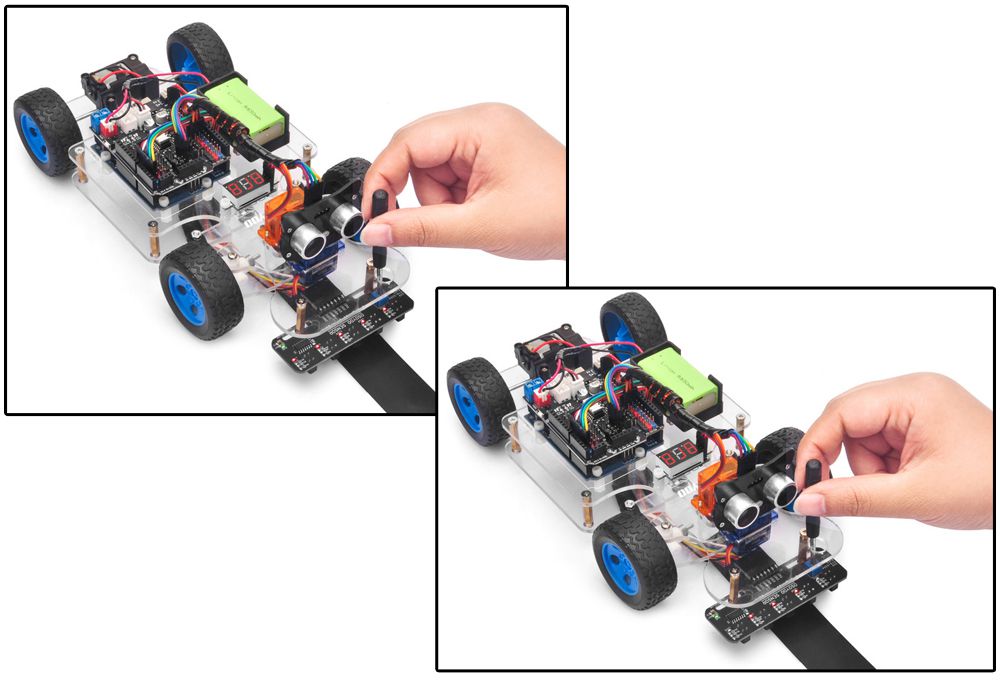
Schritt 6: Justiere die Empfindlichkeit des Spurfolgesensors.
Schalte das Auto ein (und halte dabei die Antriebsräder in der Luft) und stelle die Empfindlichkeit des Sensor mit einem Kreutzschlitzschraubendreher am Potentiometer auf dem Sensor Modul ein: die Signal-LED muss über weißem Untergrund aus sein und über der schwarzen Spur angehen.
Abschlusstest
1.Bereite eine schwarze Spur auf weißem Untergrund vor. (Die Spur sollte breiter als 20mm und schmaler als 30mm sein). Bitte beachte, dass der Abbiegewinkel der Spur nicht größer als 30 Grad ist. Falls die Spur zu scharf abbiegt, kann das Roboterauto nicht mehr folgen.
2. Trenne den OSOYOO Basic Board for Arduino vom PC und prüfe, dass der Batterieschalter auf dem OSOYOO Motor Shield ausgeschaltet ist (Schalter hoch=Aus, Schalter tief=Ein), dann stecke die 9V Batterie in die Batteriebox. (Achtung: setzte die Batterie wie im Batteriehalter gezeigt richtig gepolt ein, anderenfalls kann Dein Roboterauto beschädigt werden oder sogar Feuer fangen).
3. Stelle das Auto auf die Spur, schalte den Batterieschalter auf dem OSOYOO Motor Shield ein, und das Auto wird entlang der schwarzen Spur vorwärts fahren. Hinweis: Wenn das Auto sich nicht wie oben beschrieben bewegt solltest Du die Kabelverbindungen zum Tracking Sensor, die Steckbrücken auf dem OSOYOO Motor Shield und die Batteriespannung prüfen. Die Batteriespannung muss größer als 7.2V sein.
4. Wenn Du die Lenkwinkel nach rechts oder links ändern möchtest, ändere bitte den Code in Zeilen 23 bis 26 und lade den Sketch erneut auf das OSOYOO Basic Board for Arduino Board. ( Hinweis: der Winkel sollte nicht auf mehr als 35 Grad gesetzt werden)
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
int RIGHT=FRONT+20;
int LEFT=FRONT-20;
5. Wenn Du die Fahrzeuggeschwindigkeit ändern möchtest, ändere den folgenden Code im Sketch (Hinweis: der maximale Wert ist 255)