¡Bienvenido a la primera lección de OSOYOO Servo Steer Smart Car para Raspberry Pi!
En esta lección, instalaremos el marco del OSOYOO Servo Steer Smart Car para Raspberry Pi y simplemente instroduciremos el hardware de este robot.
Todas las lecciones se basan en el marco de esta lección. Por favor, siga esta lección cuidadosamente.
No.
Imagen
Dispositivo
Qty.
Enlace
1
Raspberry pi board 2/3/4
(no incluido en el paquete))
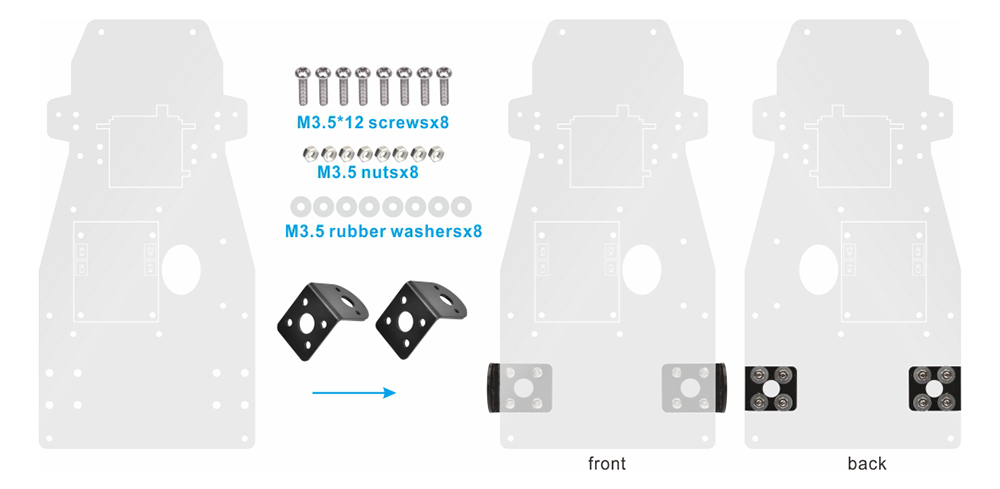
2. Fije los soportes del motor en el chasis inferior con 8pcs M3.5 * 12 tornillos, tuercas M3.5 y arandelas de goma M3.5. De arriba a abajo, use tornillos M3.5 * 12 cruzando el chasis inferior, soporte del motor, arandela de goma 3.5 y luego tuerca 3.5 de la siguiente manera:
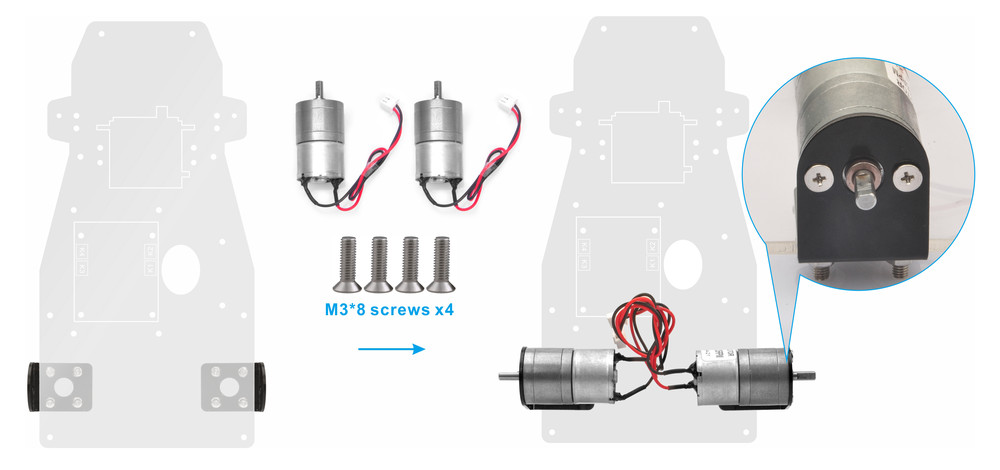
3. Soporte del motor cruzado, use tornillos M3 * 8 para fijar el motor en el soporte del motor de la siguiente manera:
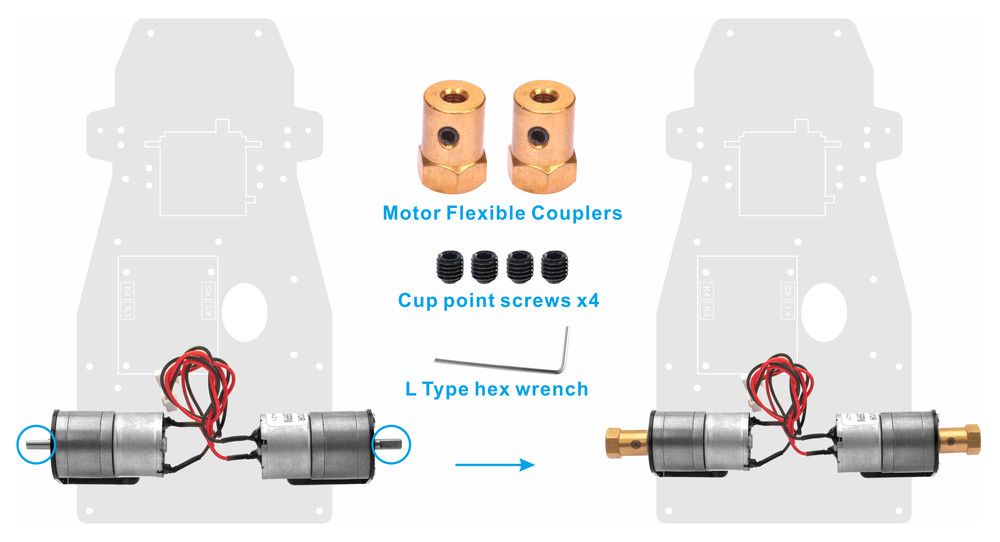
4. Instale acopladores flexibles de motor en los motores y use tornillos de punto de copa para fijar los acopladores flexibles del motor en el motor.
El eje del motor tiene un área plana. Asegúrese de que los tornillos de punta de copa estén colocados en este plano y apriete ambos tornillos en el eje.
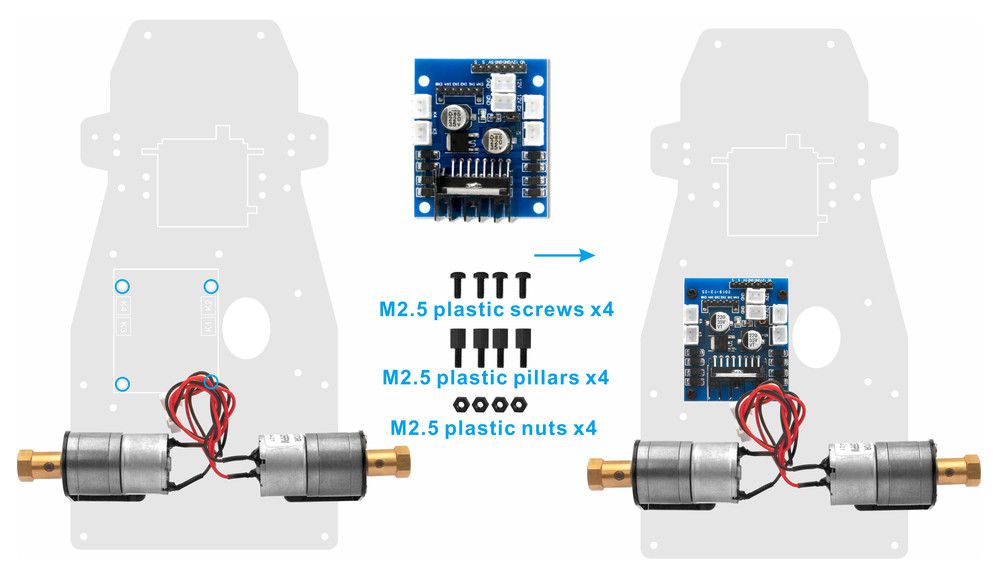
5. Instale el módulo de controlador de motor OSOYOO MODEL X para bajar el chasis del automóvil con tornillos de plástico 4pcs M2.5, pilares de plástico y tuercas de plástico. (Asegúrese de instalar el módulo del controlador del motor OSOYOO MODEL X en la dirección correcta).
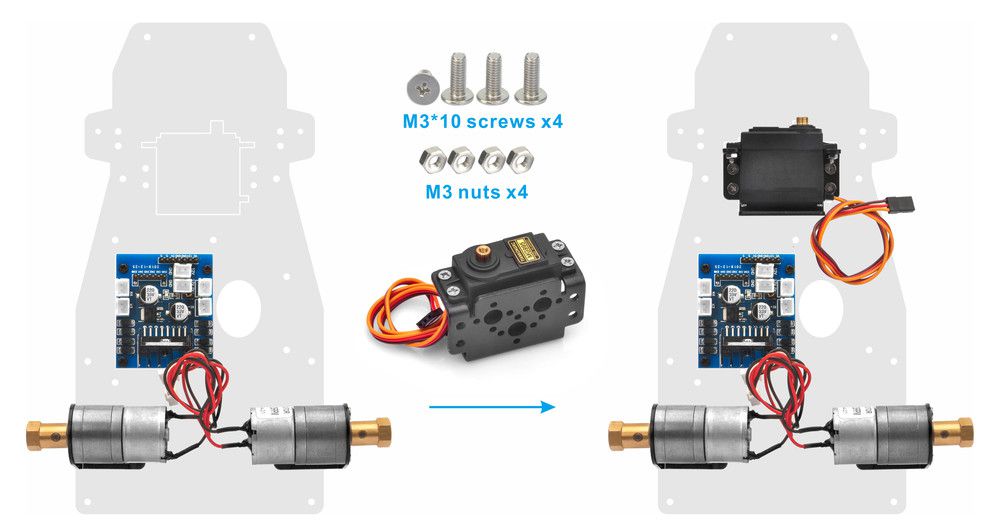
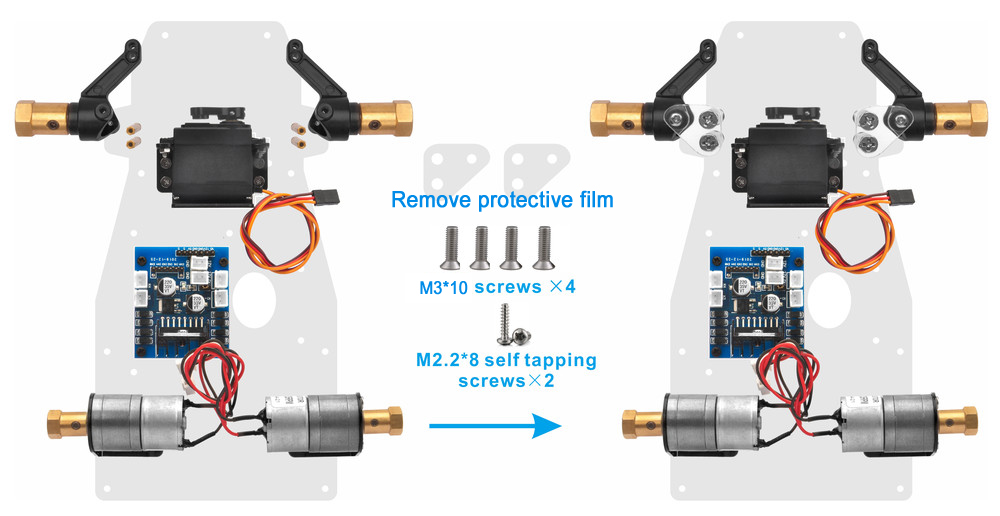
6. Fije el servomotor en el soporte del servomotor con tornillos y tuercas M3 * 10 de la siguiente manera:
7. Utilice el soporte del servomotor cruzado de tornillos M3 * 10 con el servomotor, el chasis inferior y la tuerca para fijar el servomotor en el chasis inferior de la siguiente manera:
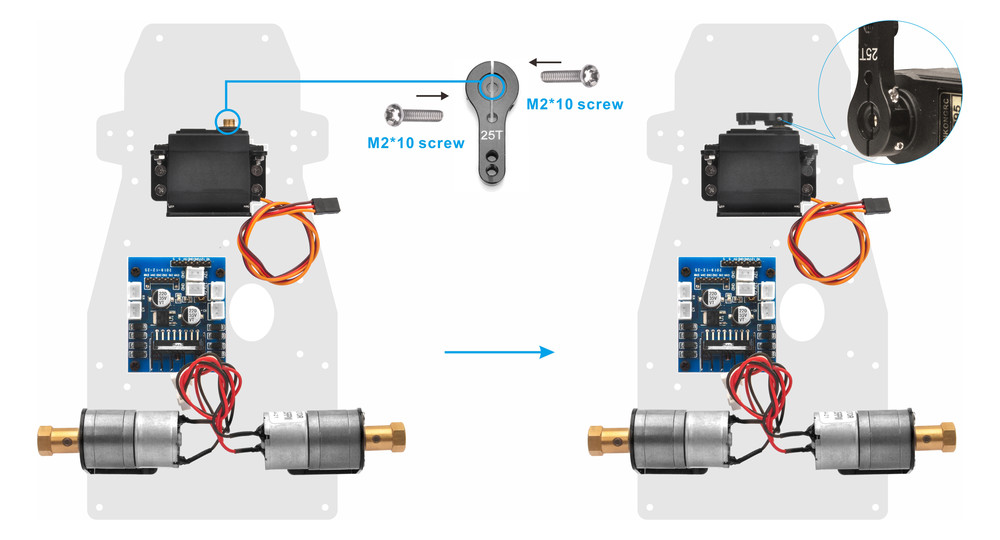
8. Instale la bocina servo en el servomotor e instale el tornillo M2 * 10 en cada lado de la bocina servo de la siguiente manera:
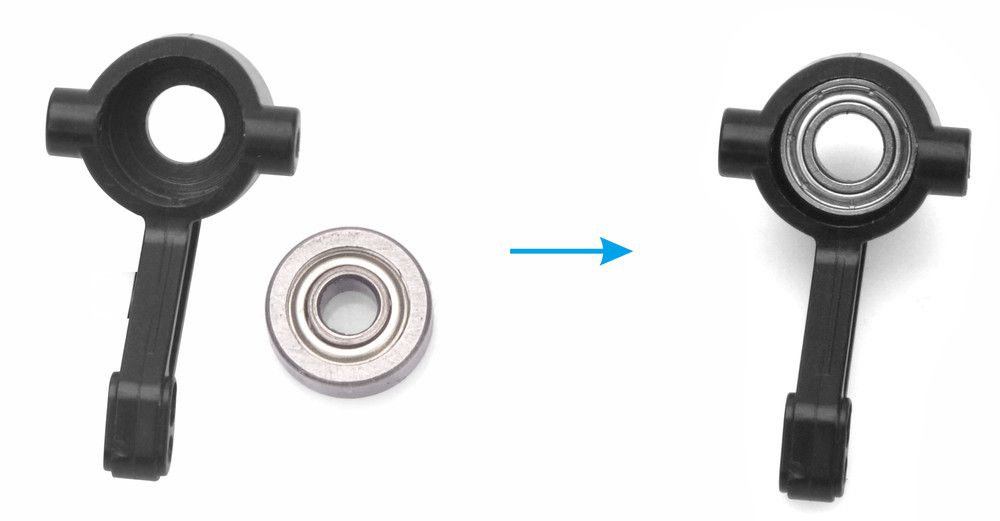
9. Empuje el rodamiento de rodillos 4x12x4 delante de la copa de dirección RC con fuerza de la siguiente manera:
10. Empuje firmemente el rodamiento de rodillos 4x8x4 en la parte posterior de la copa de dirección RC de la siguiente manera:
11. Utilice la copa de dirección RC cruzada de tornillo M4 * 20 de la siguiente manera:
12. Fije los acopladores flexibles del motor en el tornillo M4 * 20 con tornillos de punto de copa de la siguiente manera:
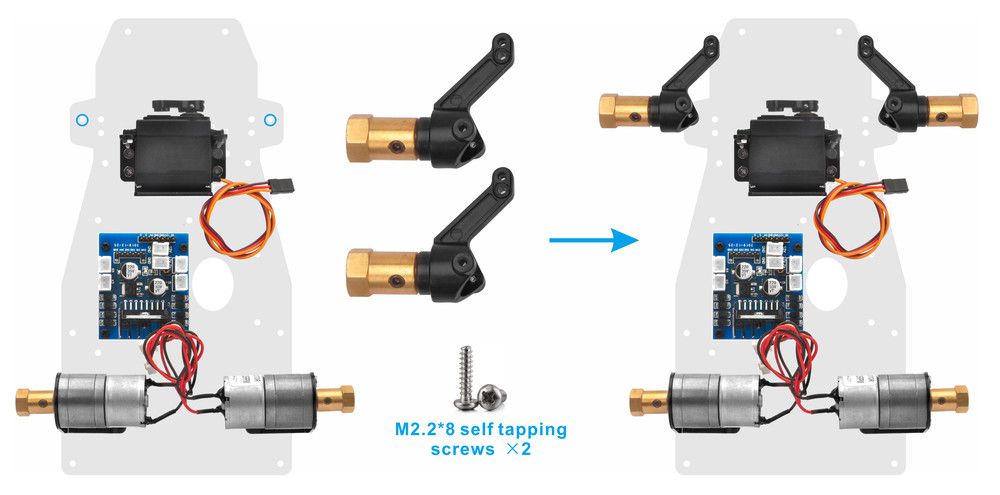
13. Fije las copas de dirección RC en el chasis inferior del automóvil con tornillos autorroscantes M2.2 * 8 de la siguiente manera:
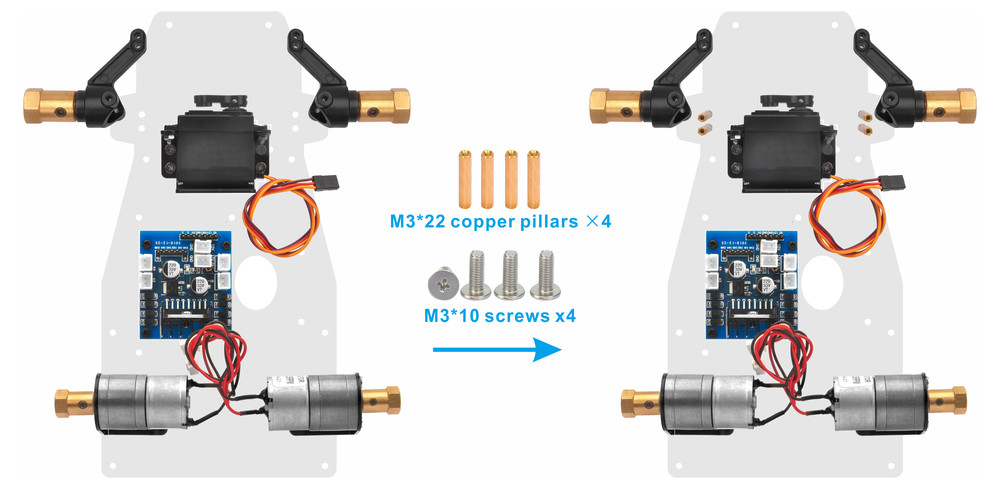
14. Instale los pilares de cobre M3 * 22 junto a las copas de dirección RC con tornillos M3 * 10 de la siguiente manera:
15. Instale láminas acrílicas triangulares en los pilares de cobre M3 * 22 y fíjelos con tornillos autorroscantes M2.2 * 8 y tornillos M3 * 10 de la siguiente manera:
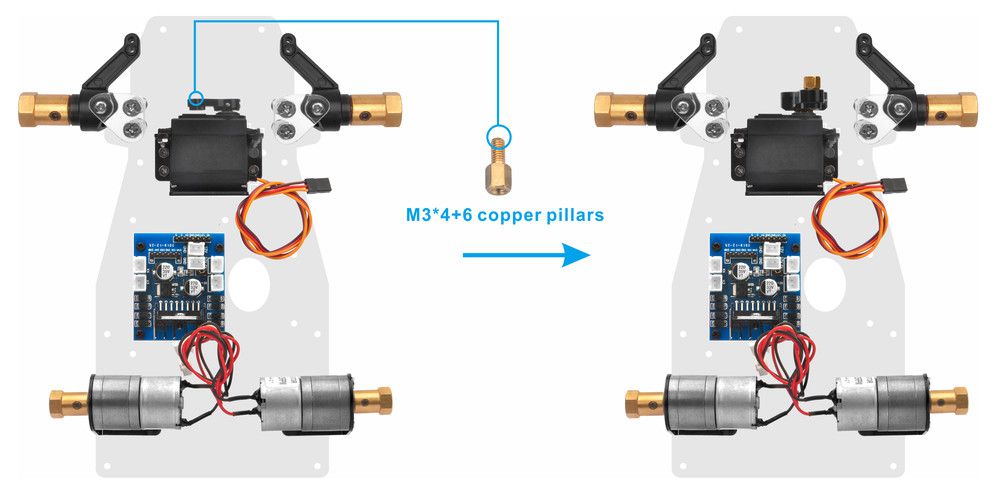
16. Instale el pilar de cobre M3 * 4 + 6 en la bocina servo de la siguiente manera:
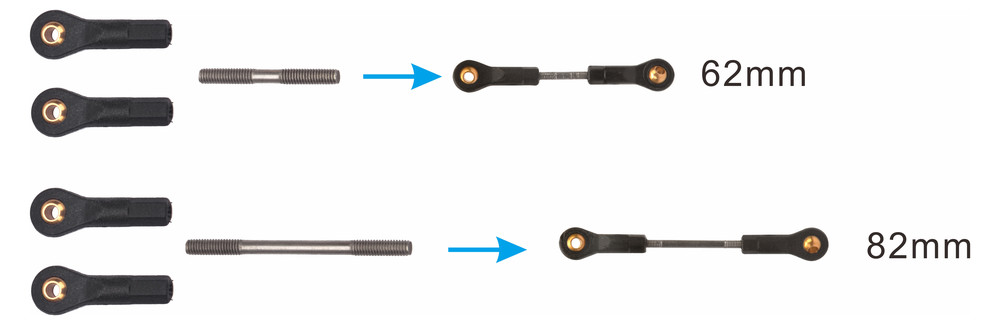
17. Fije 2 bielas con cojinetes de extremo radial de varilla y asegúrese de que las longitudes de estos sean de aproximadamente 62 mm y 82 mm
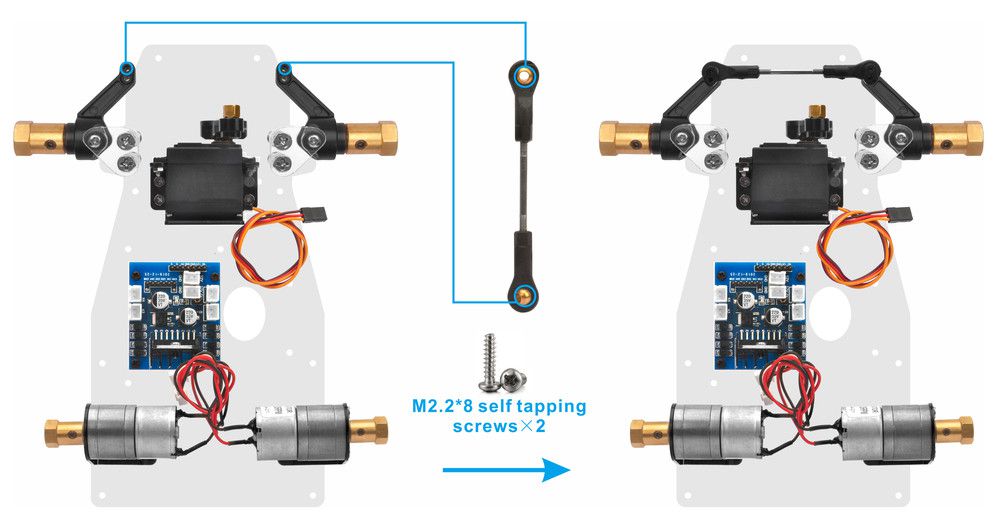
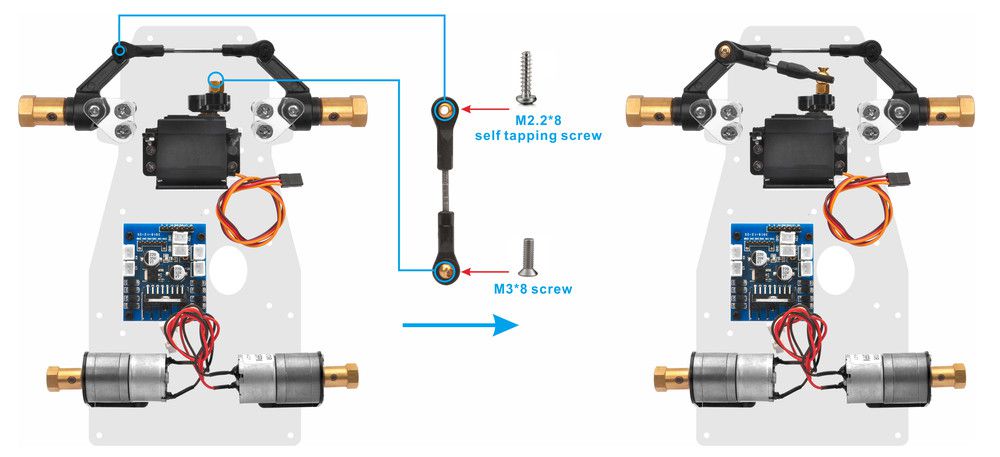
18. Instale dos extremos de la biela de 82 mm debajo de las copas de dirección RC con tornillos autorroscantes 2pcs M2.2 * 8 de la siguiente manera (Nota: Al instalar la biela de 82 mm, mantenga las cabezas de dos copas de dirección RC paralelas, o necesita ajustar la longitud de esta biela):
19. Instale un extremo de la biela de 62 mm en la copa de dirección RC izquierda con tornillo autorroscante M2.2 * 8 y el otro extremo en el pilar de cobre M3 * 4 + 6 con tornillo M3 * 8 de la siguiente manera (Nota: Al instalar biela de 62 mm, mantenga la bocina servo perpendicular al micro servo, o necesita ajustar la longitud de esta biela):
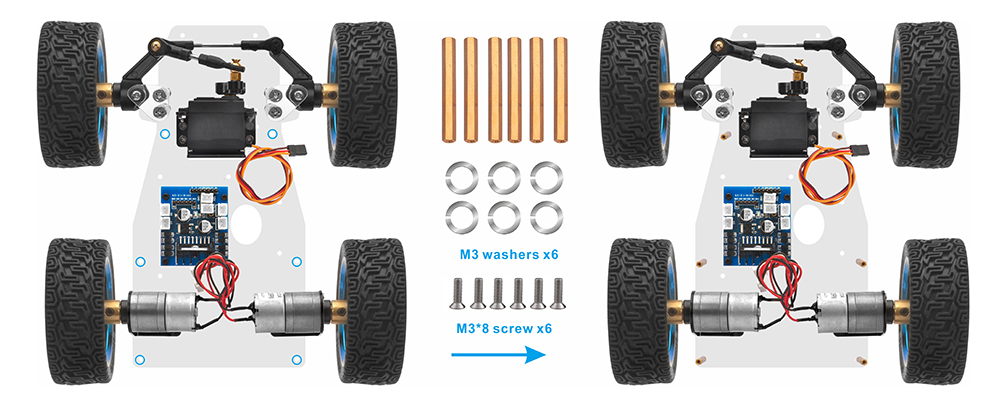
20. Instale 4 ruedas en acopladores flexibles del motor con tornillos M4 * 6 de la siguiente manera:
21. De abajo hacia arriba, use el lavado M3 * 8 cruzado M3, el chasis inferior y el pilar de cobre M3 * 45 para fijar el pilar de cobre M3 * 45 en el chasis bajo de la siguiente manera:
22. Use la cruz del pilar de plástico M2.5 Raspberry Pi y el pilar de plástico M2.5 * 13 de abajo hacia arriba y fije los pilares de plástico 2pcs M2.5 * 13 en Raspberry Pi de la siguiente manera:
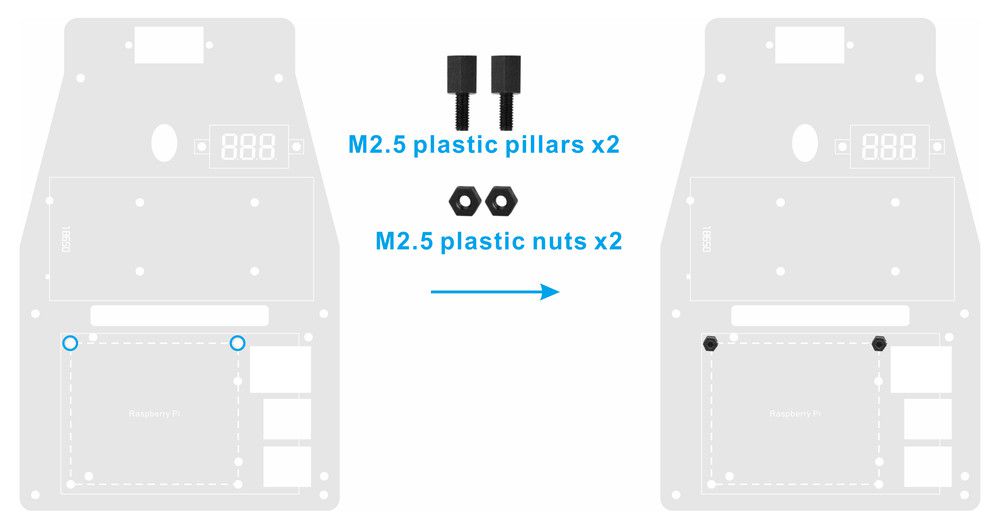
23. Arregle los pilares de plástico 2pcs M2.5 en el chasis superior de la siguiente manera:
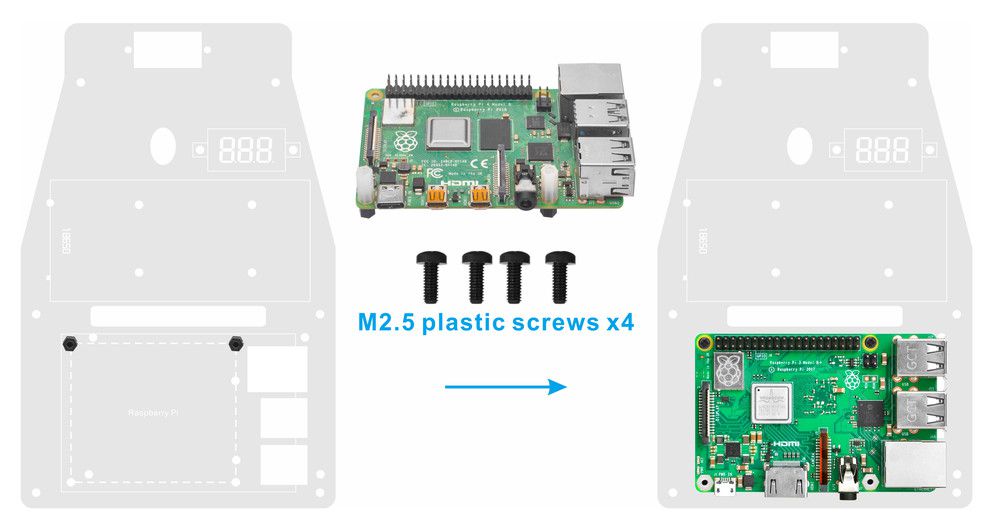
24. Instale tornillos de plástico 2pcs M2.5 debajo del chasis y tornillos de plástico 2pcs M2.5 en Raspberry Pi
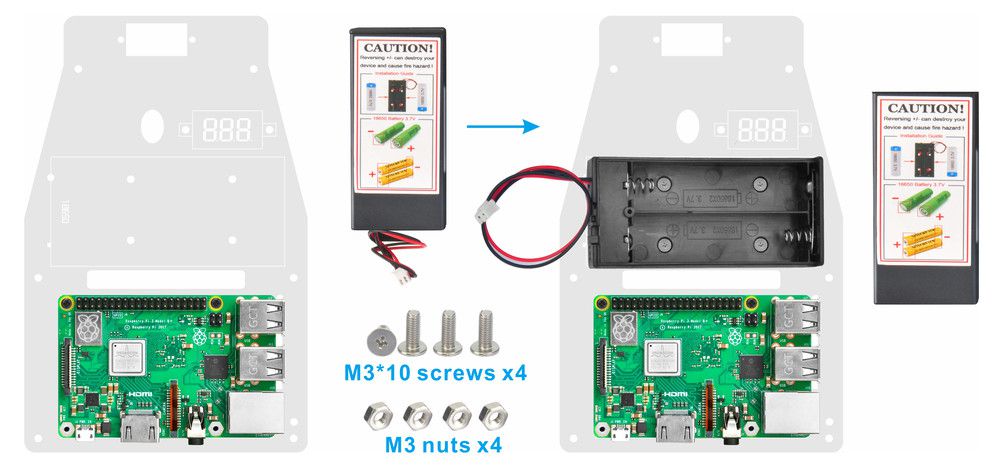
25. Arregle la caja de la batería 18650 en el chasis superior con tornillos M3 * 10 y tuercas M3
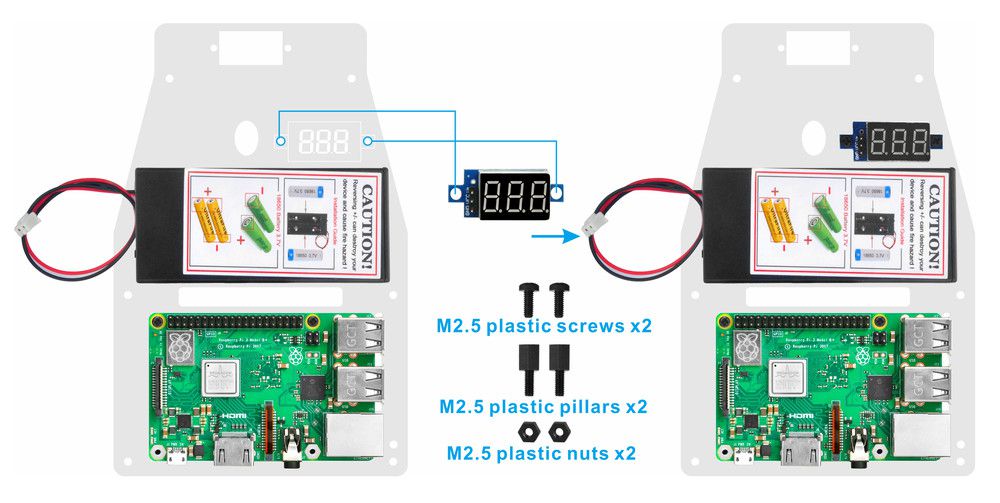
26. Instale el medidor de voltaje en el chasis superior del automóvil con tornillos de plástico 2pcs M2.5, pilares de plástico y tuercas de plástico
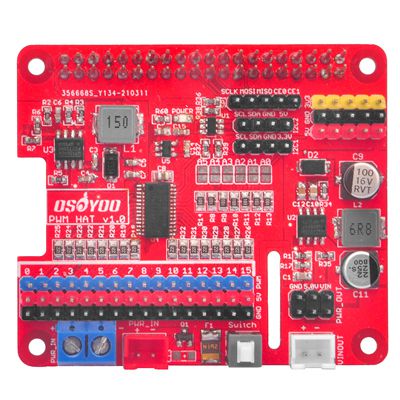
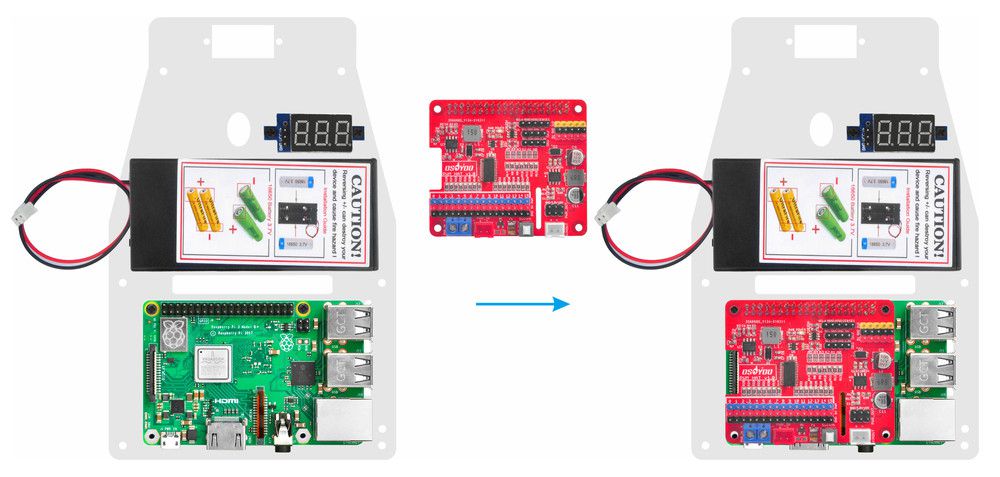
27. Inserte OSOYOO PWM Hat V1.0 en Raspberry Pi de la siguiente manera: Nota:
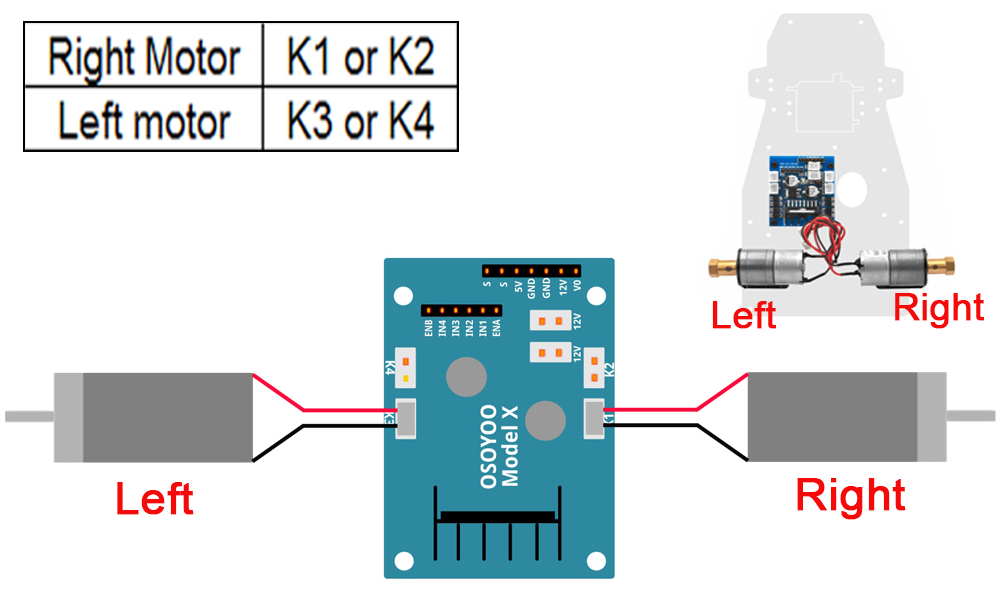
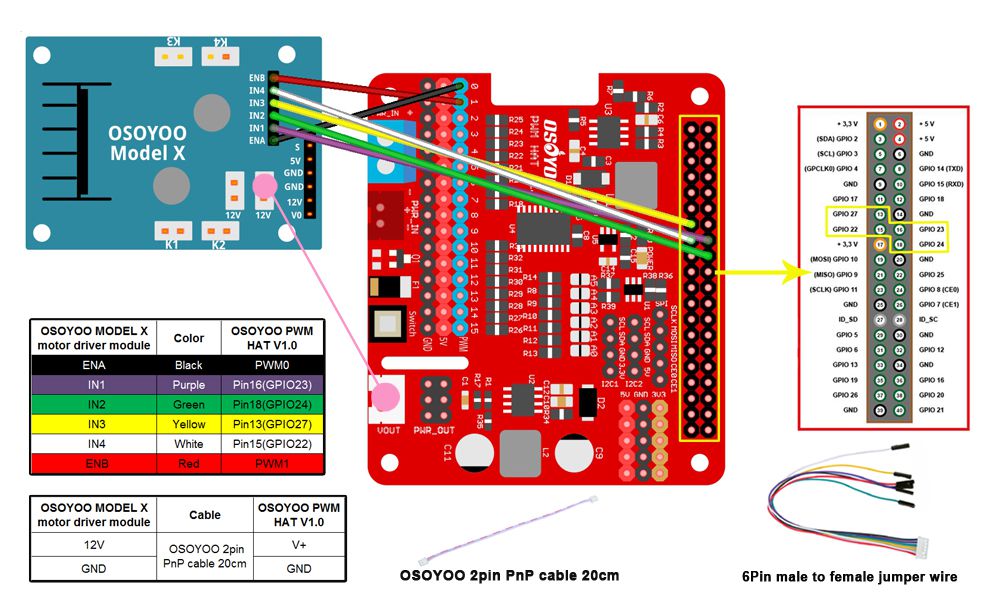
1) Conecte el motor izquierdo al módulo de controlador de motor OSOYOO MODEL X K3 o K4 y el motor derecho al zócalo K1 o K2 como se muestra en el siguiente gráfico:
2) Conecte el módulo del controlador del motor OSOYOO MODEL X al OSOYOO PWM Hat V1.0 con un cable de puente hembra a hembra de 6Pin, también conecte el cable de 2 pines y 20 cm como se muestra en el siguiente gráfico
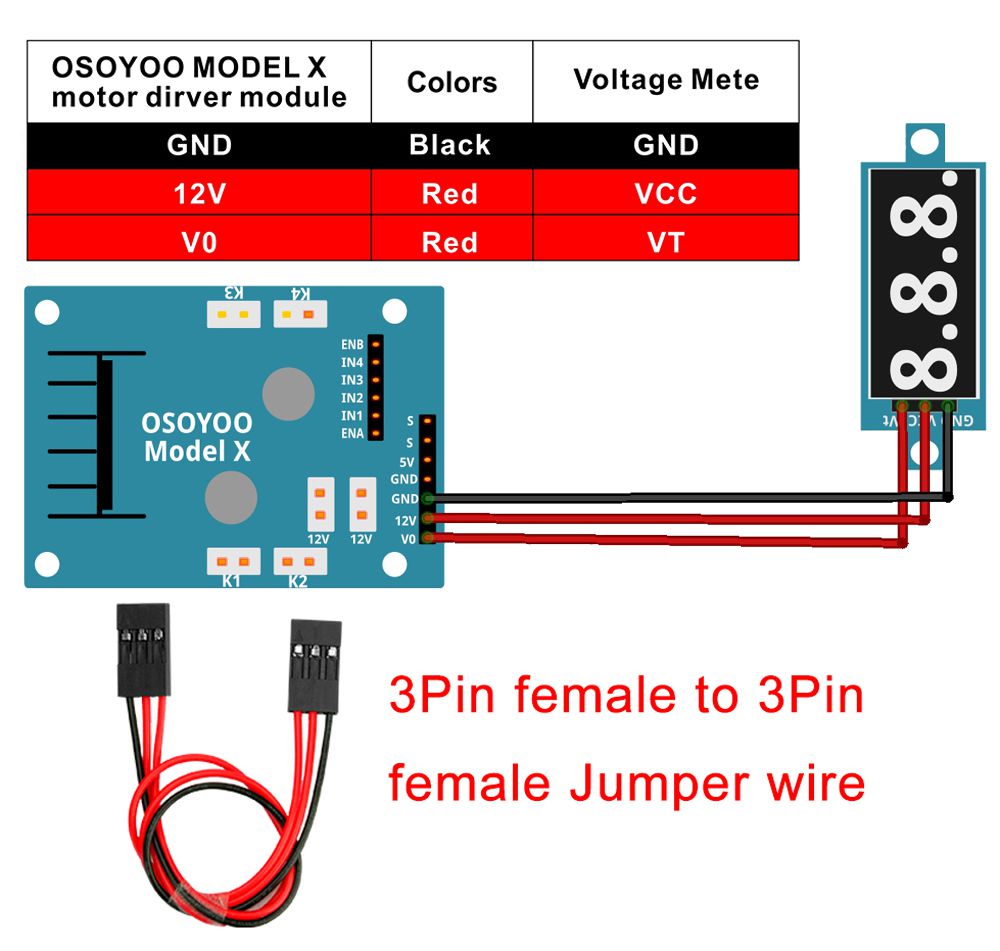
3) Conecte el medidor de voltaje al módulo de controlador de motor OSOYOO MODEL X con cables de puente hembra a hembra de 3 pines como se muestra a continuación conexión diagrama
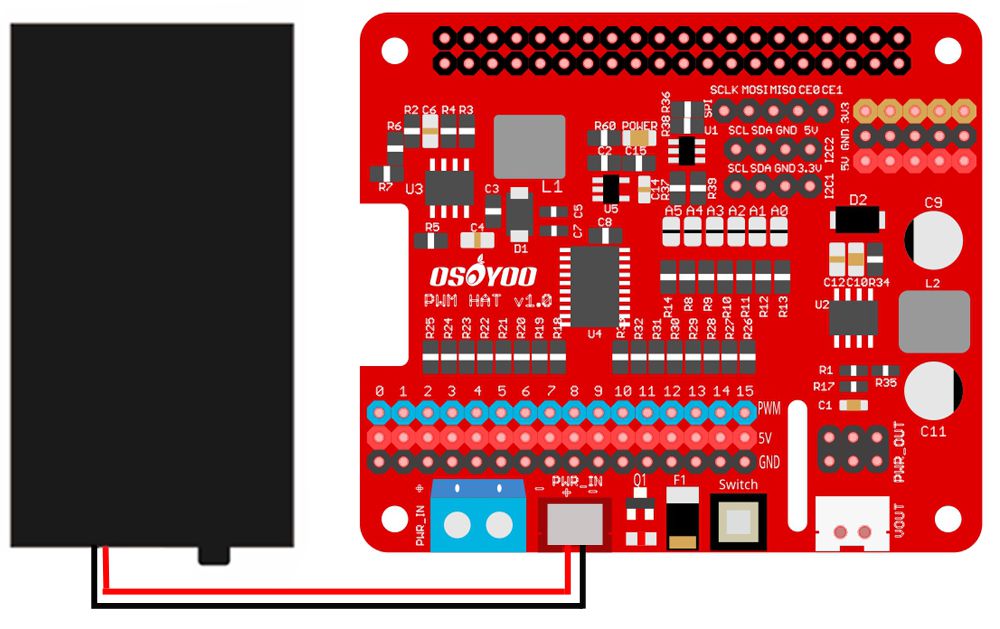
4) Conecte la caja de la batería 18650 a OSOYOO PWM Hat V1.0 como se muestra a continuación diagrama de conexión
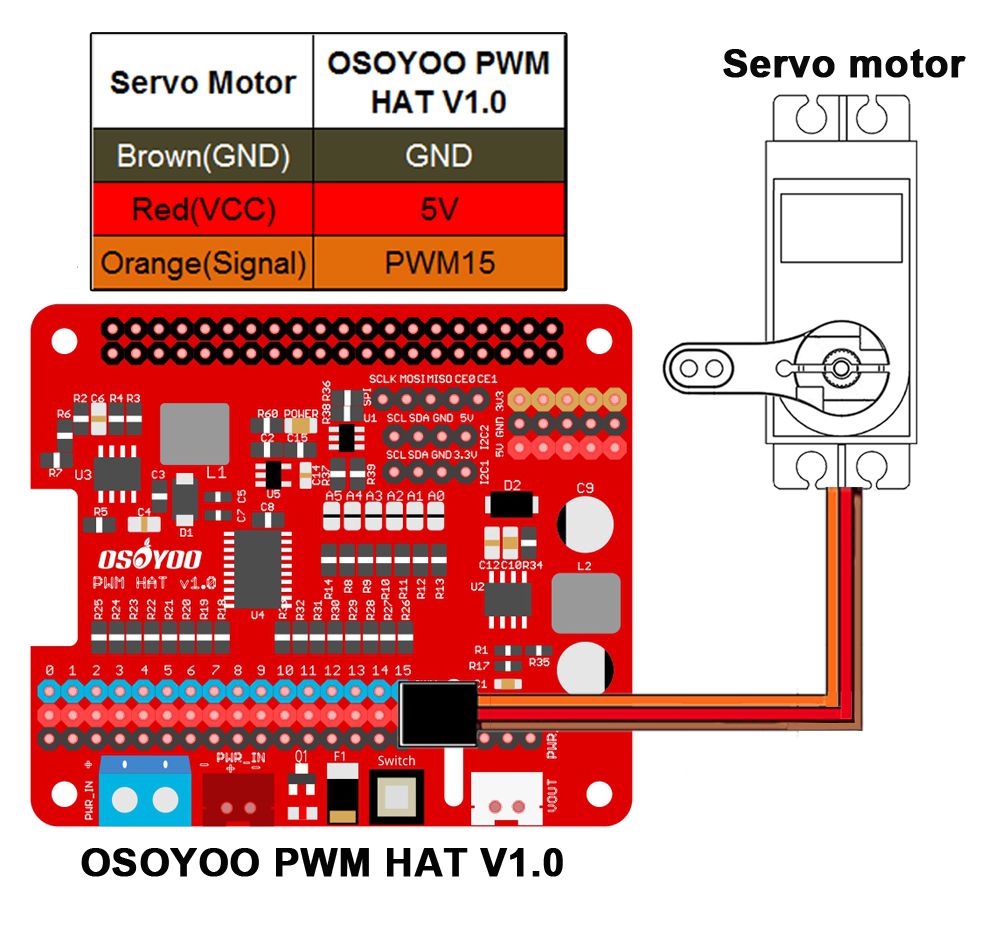
5) Conecte el servomotor a 15 de OSOYOO PWM Hat V1.0 de la siguiente manera:
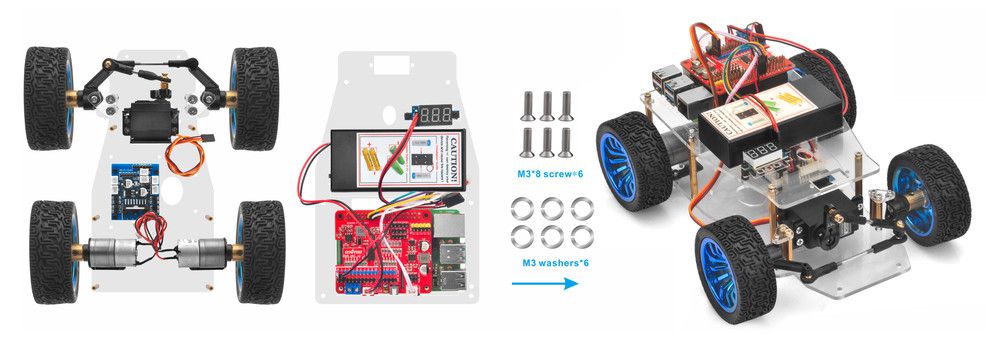
6) Conecte el chasis superior al chasis inferior con 6 pilares de cobre y fije los pilares de cobre con tornillos M3 * 8 y lavados M3 de la siguiente manera:
7) Instale sus baterías 18650 en la caja de la batería para 18650 según las siguientes instrucciones (Nota: Marque la instrucción de la casilla y asegúrese de que la dirección polar sea correcta, de lo contrario puede destruir su dispositivo y causar peligro de incendio.):
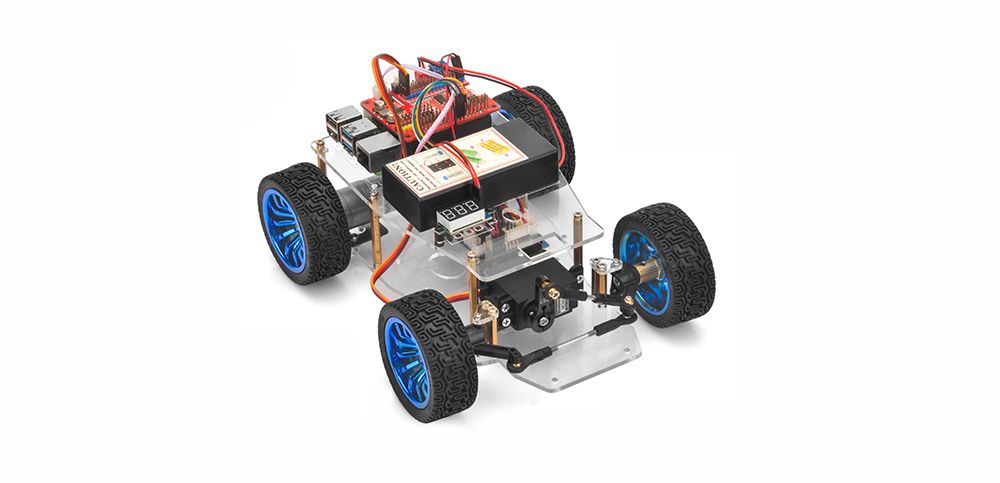
Ahora la instalación de hardware está casi inactiva.











































 4) Conecte la caja de la batería 18650 a OSOYOO PWM Hat V1.0 como se muestra a continuación diagrama de conexión
4) Conecte la caja de la batería 18650 a OSOYOO PWM Hat V1.0 como se muestra a continuación diagrama de conexión