Herzlich willkommen zur ersten Lektion mit dem OSOYOO Servo Steer Smart Car für Raspberry Pi!
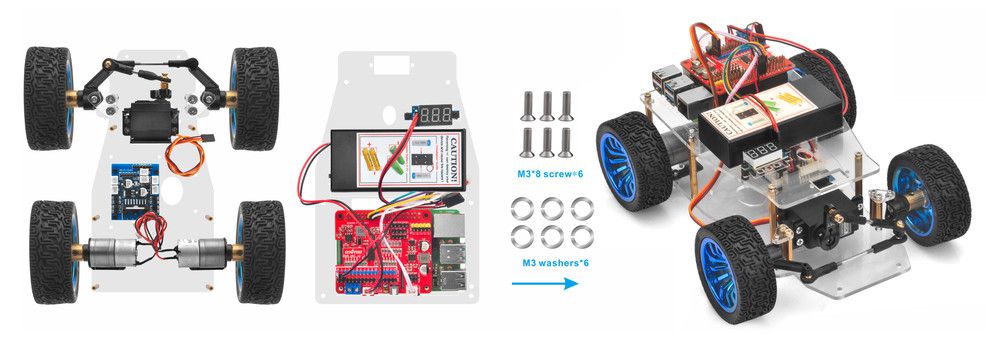
In dieser Lektion geben wir eine Einführung zur Hardware des OSOYOO Servo Steer Smart Car für Raspberry Pi und bauen das Roboterauto zusammen.
Alle folgenden Lektionen basieren auf den Grundlagen dieser Lektion. Deshalb folge ihr bitte aufmerksam.
Bitte sieh Dir neben dem Tutorial-Text auf jeden Fall auch das Erklär-Video an – viele kleine Tipps und Tricks kannst Du Dir dort einfach abschauen.
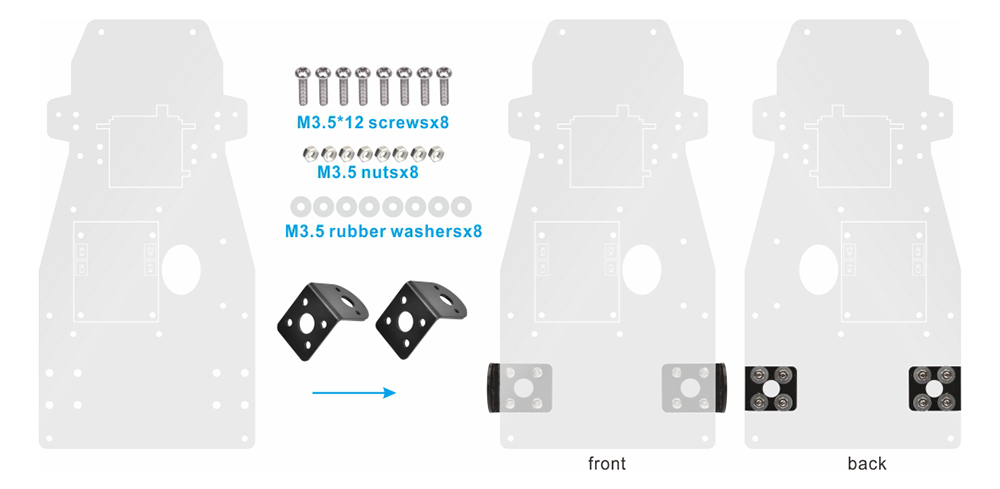
2. Befestige die Motorhalter mit 8 Schrauben M3.5*12, M3.5 Muttern und M3.5 Kunststoff-Unterlegscheiben. Stecke die Schrauben von oben durch das untere Chassis, dann durch die Motorhalter, dann durch die Unterlegscheiben und schraube die Motorhalter mit den Muttern fest.
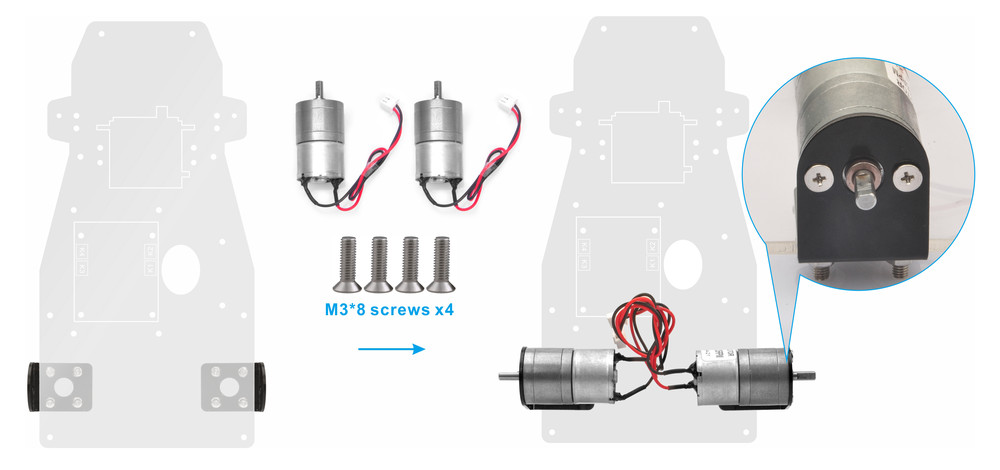
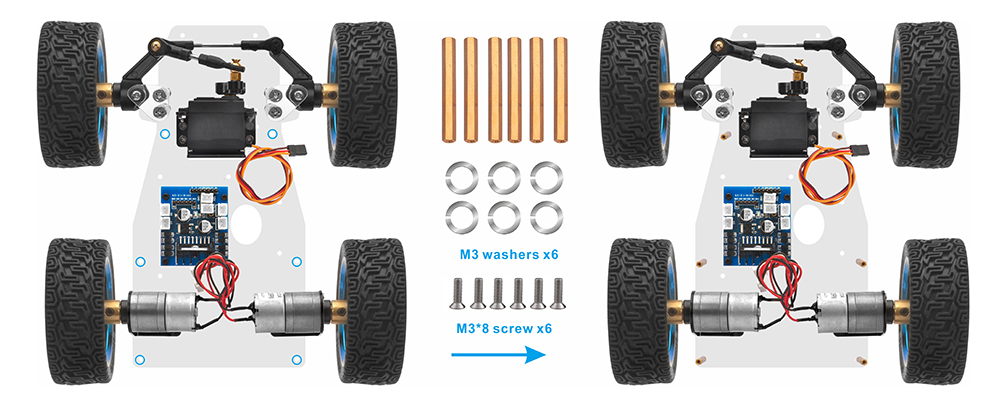
3. Befestige die Motoren mit M3*8 Schrauben an den Motorhaltern.
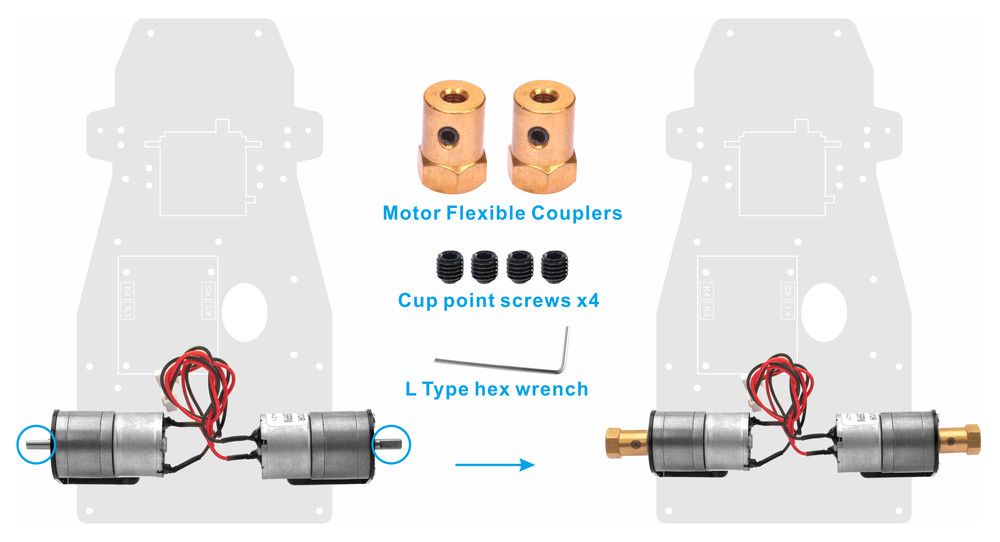
4. Stecke die Sechskant-Felgenmitnehmer auf die Motorachsen und schraube sie mit jeweils zwei Madenschrauben fest.
Die Motorachse ist auf einer Seite abgeflacht. Achte darauf, dass eine Madenschraube genau auf diese Fläche trifft und schraube dann den Felgenmitnehmer mit beiden Madenschrauben auf der Achse fest.
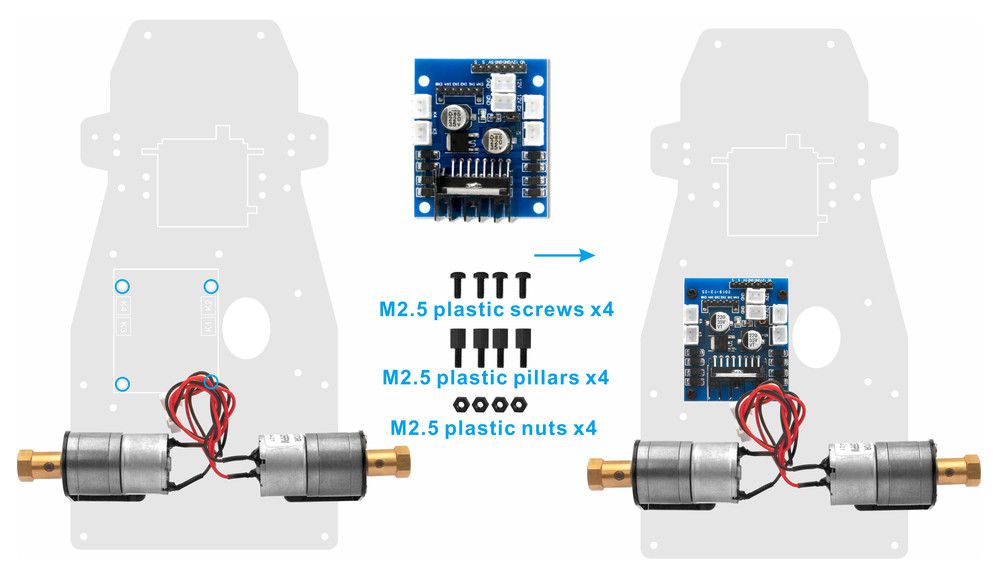
5. Installiere das OSOYOO MODEL X Motor Driver Modul mit je 4 Kunststoff-Schrauben, -Bolzen und -Muttern auf dem unteren Chassis. (Achte darauf, das OSOYOO MODEL X Motor Driver Modul richtig herum zu installieren)
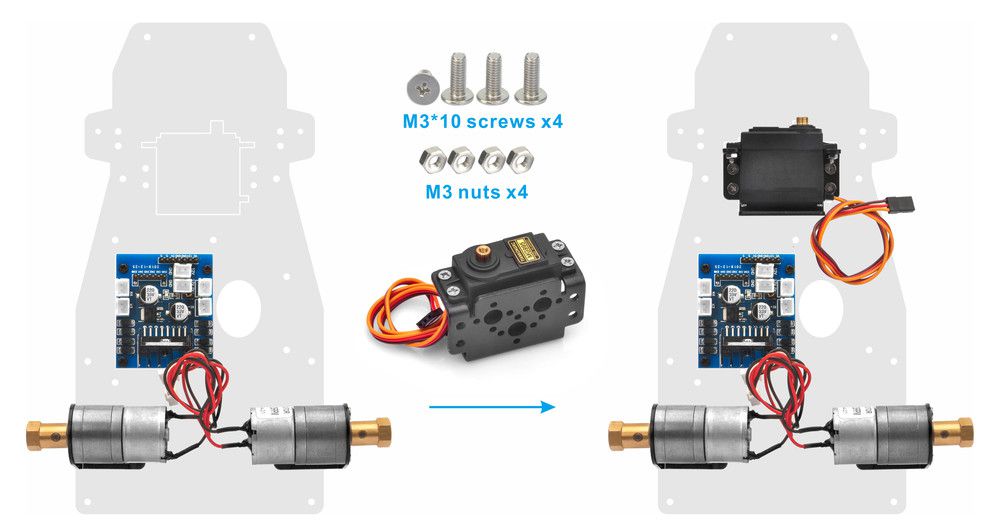
6. Befestige den Servo Motor am Servo Motorhalter mit M3*10 Schrauben:
7. Stecke 4 Schrauben M3*10 durch den Servo Motorhalter mit Servo Motor und durch das untere Chassis und schraube dann alles von unten mit 4 Muttern fest.
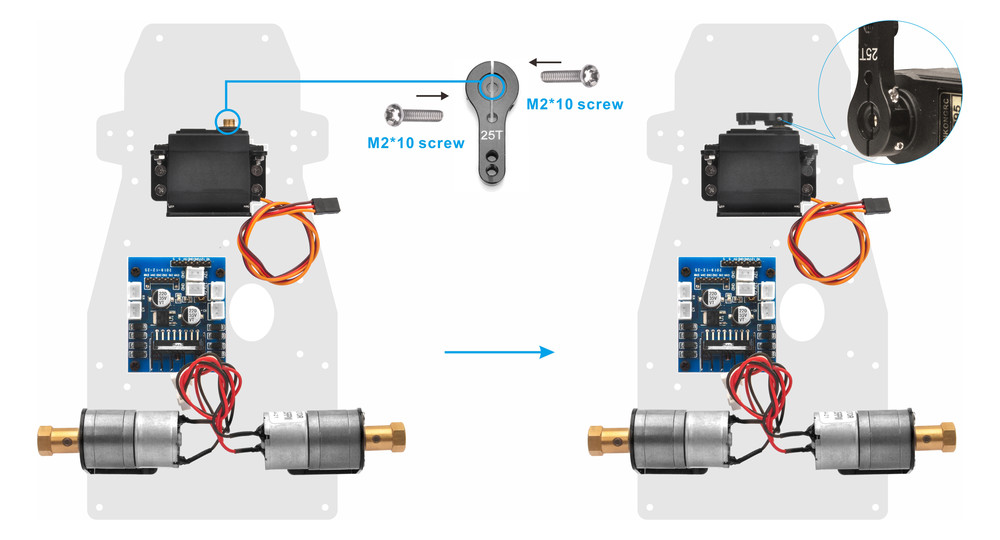
8. Stecke das Servo Horn auf den Servo Motor und befestige es mit zwei Schrauben M2*10.
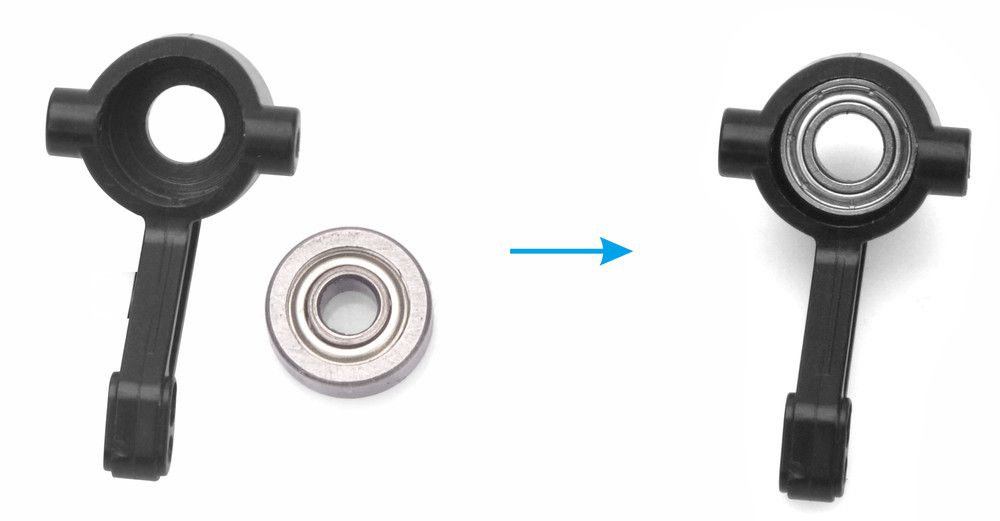
9. Drücke das 4x12x4 Kugellager wie auf dem Bild gezeigt fest in die Radaufhängung.
10. Drücke das 4x8x4 Kugellager auf der Rückseite in die Radaufhängung.
11. Stecke eine M4*20 Schraube durch die Radaufhängung.
12. Befestige den Sechskant-Felgenmitnehmer mit Hilfe der Madenschrauben auf der M4*20 Schraube.
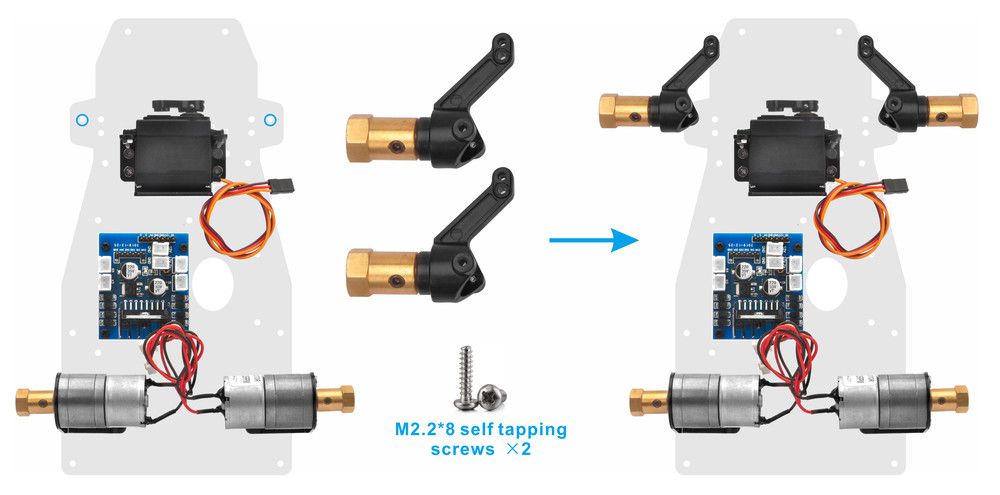
13. Befestige die Radaufhängungen auf dem unteren Chassis mit M2.2*8 selbstschneidenden Schrauben:
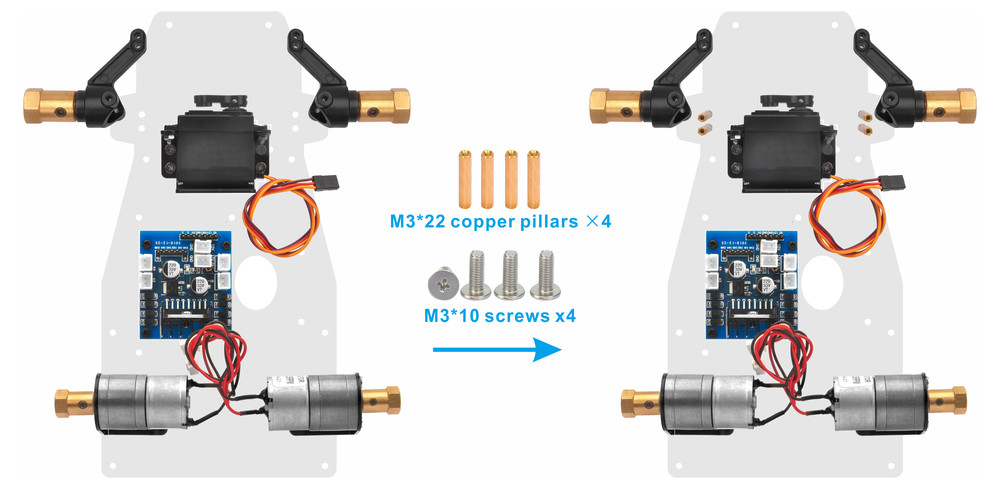
14. Schraube M3*22 Messingbolzen mit M3*10 Schrauben neben die Radaufhängungen.
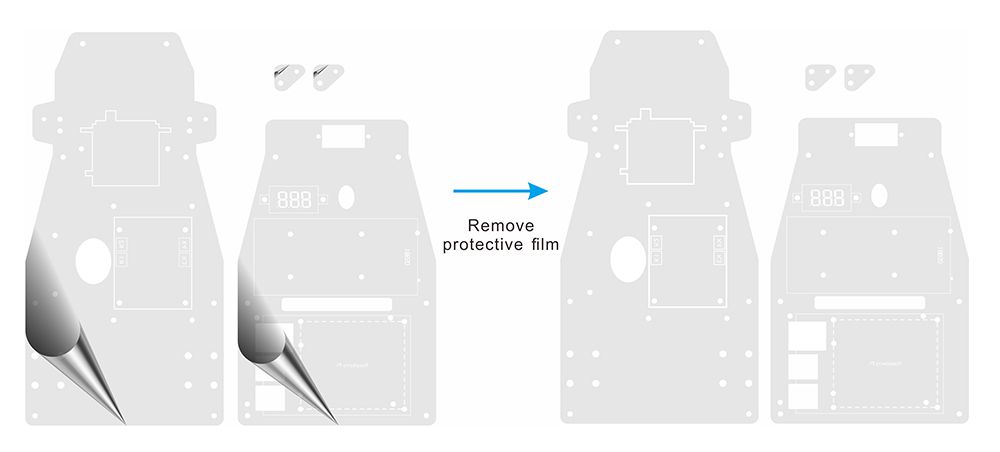
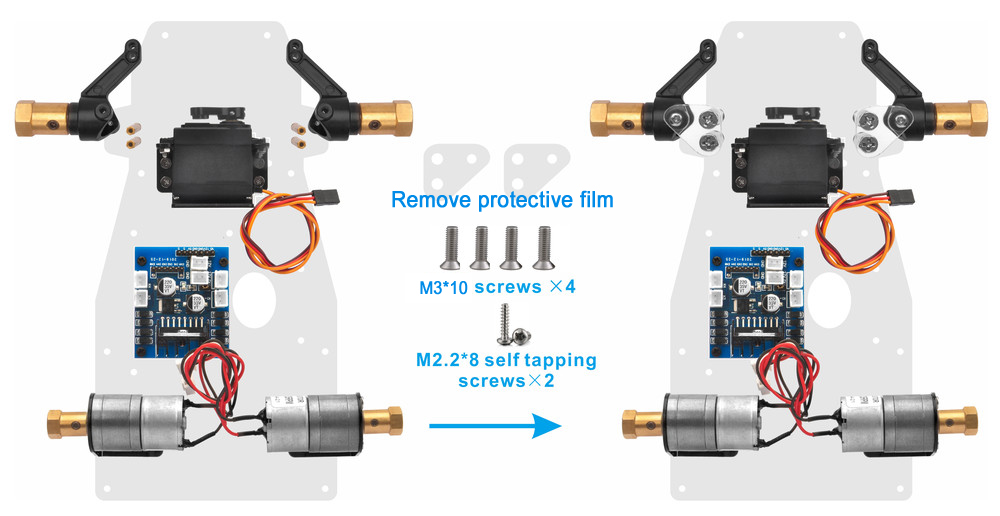
15. Entferne den Schutzfilm von den dreieckigen Acryl-Haltern und schraube sie mit M3*10 Schrauben auf die Messingbolzen. Befestige dann die Oberseite der Radaufhängungen mit M2.2*8 selbstschneidenden Schrauben an den dreieckigen Acryl-Haltern.
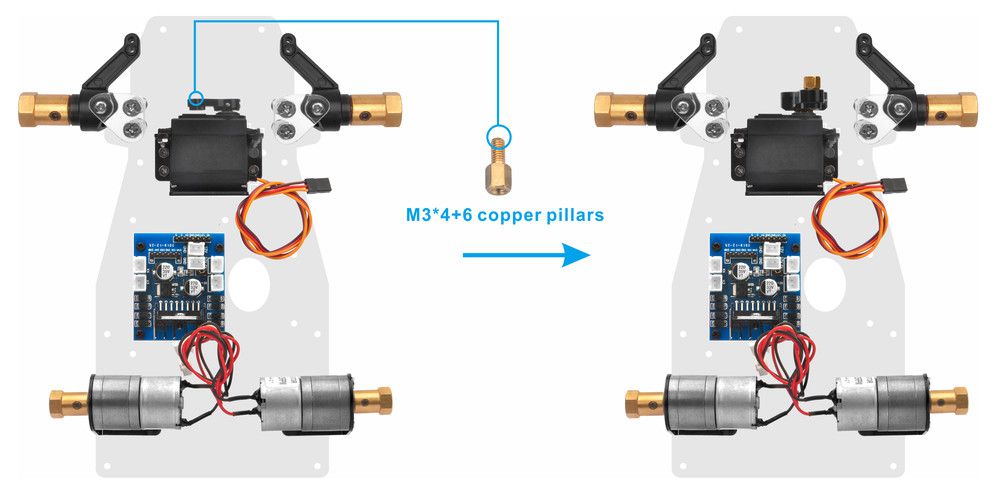
16. Schraube den kleinen M3*4+6 Messingbolzen auf das Servo-Horn:
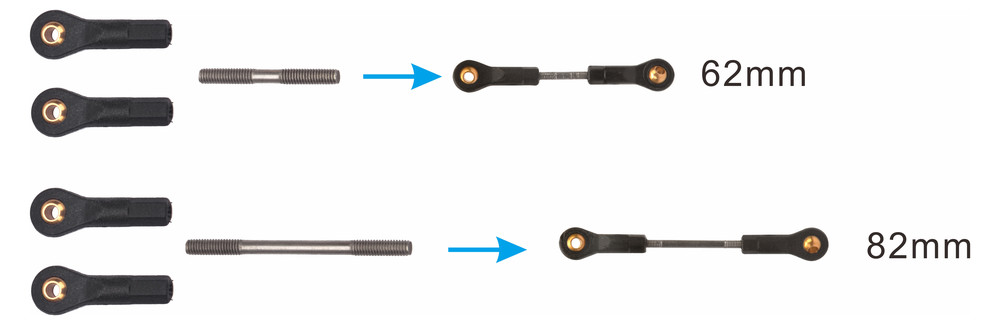
17. Schraube die zwei Gewindestangen jeweils in zwei Kugelgelenkbolzen und stelle Gesamtlängen von 62mm und 82mm ein.
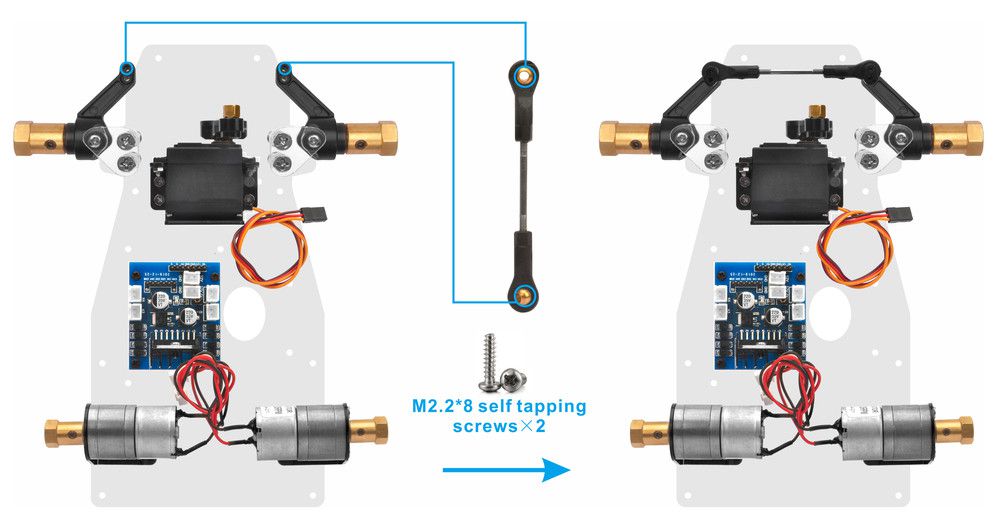
18. Verbinde mit 2 selbstschneidenden M2.2*8 Schrauben die zwei Enden der 82mm Spurstange von unten mit den Spurhebeln der Radaufhängungen ( Hinweis: Halte bei der Installation der 82mm Spurstange die zwei Radaufhängungen in “geradeaus-Position”, falls das nicht gelingt, korrigiere die Länge der Spurstange.) :
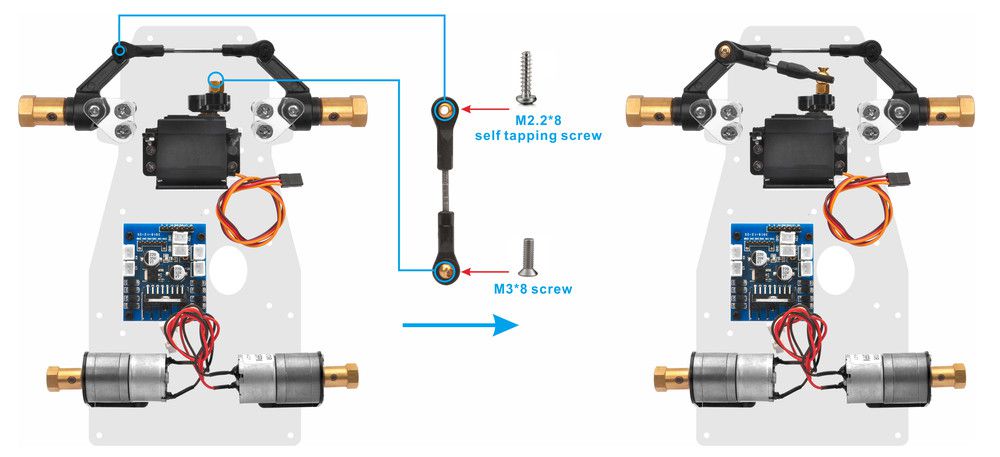
19. Verbinde mit einer M2.2*8 selbstschneidenden Schraube ein Kugelgelenk des 62mm Lenkhebels mit dem Spurhebel der linken Radaufhängung. Schraube das andere Ende des 62mm Lenkhebels mit einer M3*8 Schraube auf den M3*4+6 Messingbolzen am Servo Horn. ( Hinweis: Halte beim Anschrauben des 62mm Lenkhebels das Servo Horn senkrecht zum Servo. Falls das nicht gelingt, korrigiere die Länge des 62mm Lenkhebels.) :
20. Schraube mit M4*6 Schrauben die 4 Räder an die Sechskant-Felgenmitnehmer.
21. Befestige die M3*45 Messingbolzen mit M3*8 Schrauben auf dem unteren Chassis. Die Unterlegscheiben befinden sich zwischen Schraubenkopf und Chassis.
22. Befestige zwei M2.5*12 Kunststoffbolzen mit zwei M2.5 Kunststoffbolzen auf dem Raspberry Pi.
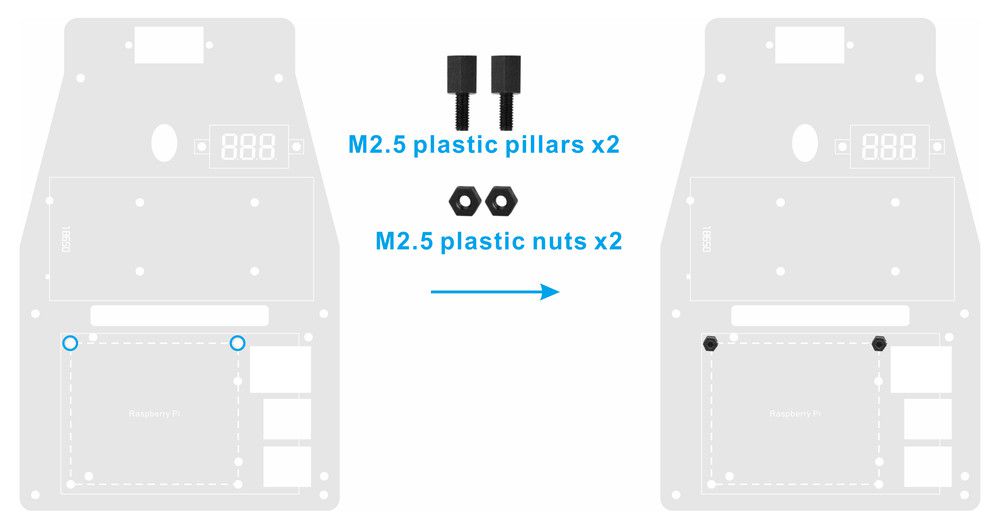
23. Befestige zwei M2.5 Kunststoffbolzen auf dem oberen Chassis.
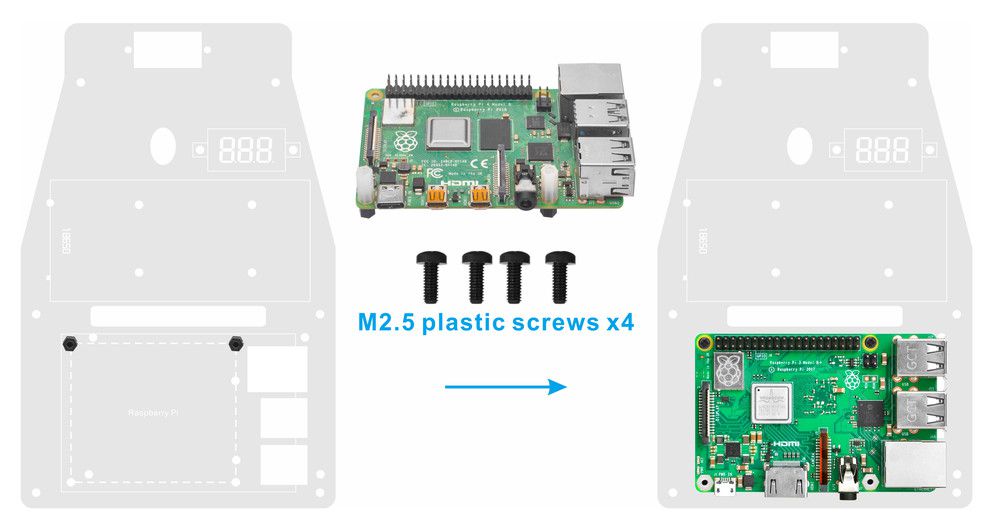
24. Befestige den Raspberry Pi auf dem oberen Chassis mit 4 Kunststoffschrauben M2.5 – zwei Schrauben von unten durch das obere Chassis, zwei von oben durch den Raspberry Pi.
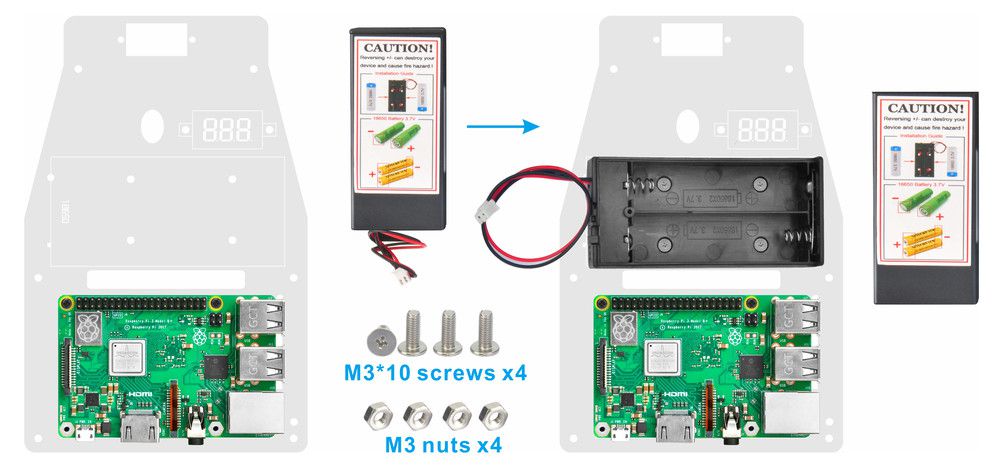
25. Befestige die 18650 Batterie Box mit M3*10 Schrauben und M3 Muttern auf dem oberen Chassis.
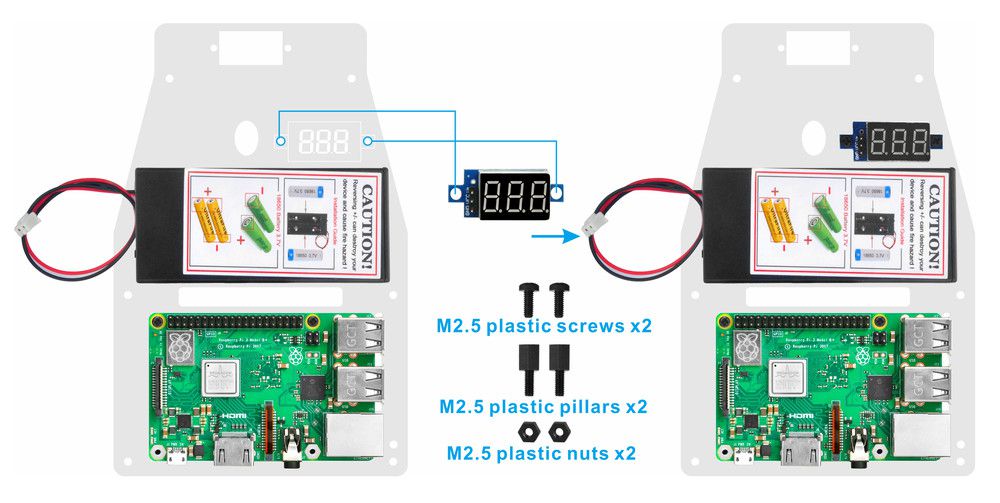
26. Schraube das Voltmeter mit 2 Kunststoff-Schrauben, -Bolzen und -Muttern auf das obere Fahrzeugchassis.
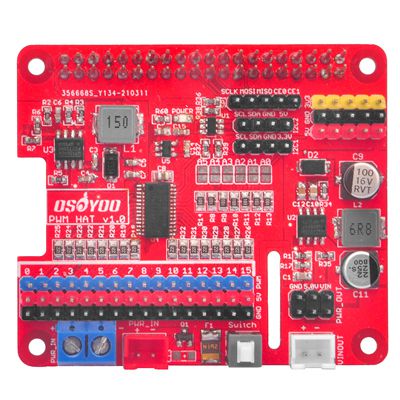
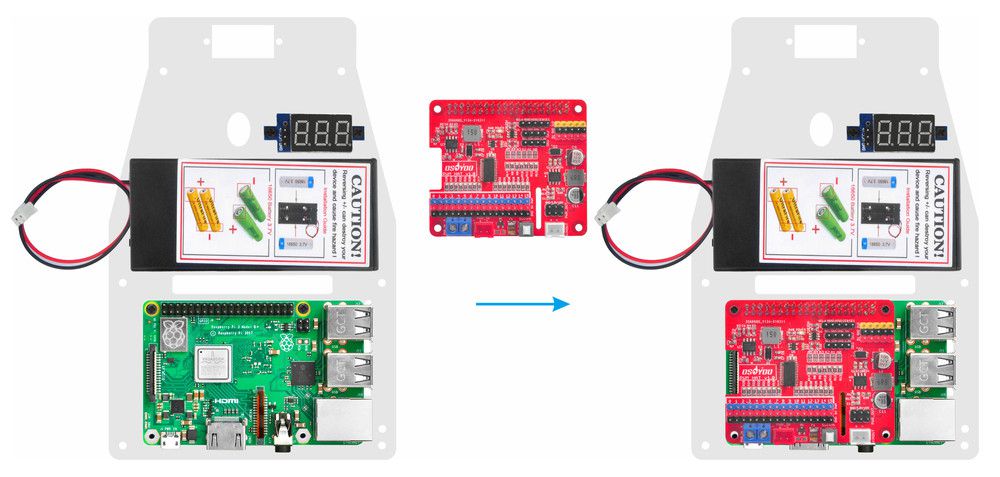
27. Stecke den OSOYOO PWM Hat V1.0 wie auf dem Bild gezeigt auf den Raspberry Pi: Hinweis: Verbinde vor dem Verschrauben von oberem mit unterem Chassis die elektrischen Komponenten . Führe die elektrischen Verbindungen durch die vorbereiteten Ausschnitte des oberen Chassis. Um mehr über die GPIO Pins des Raspberry Pi zu lernen, kannst Du folgende Seite besuchen: https://osoyoo.com/2017/06/26/introduction-of-raspberry-pi-gpio/
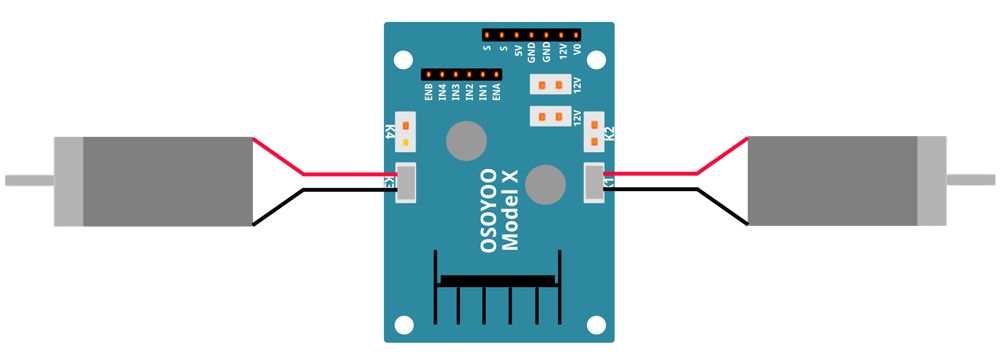
1) Verbinde den linken Motor zum OSOYOO MODEL X Motor Driver Modul K3 oder K4 und den rechten Motor zu K1 oder K2 wie auf folgendem Bild:
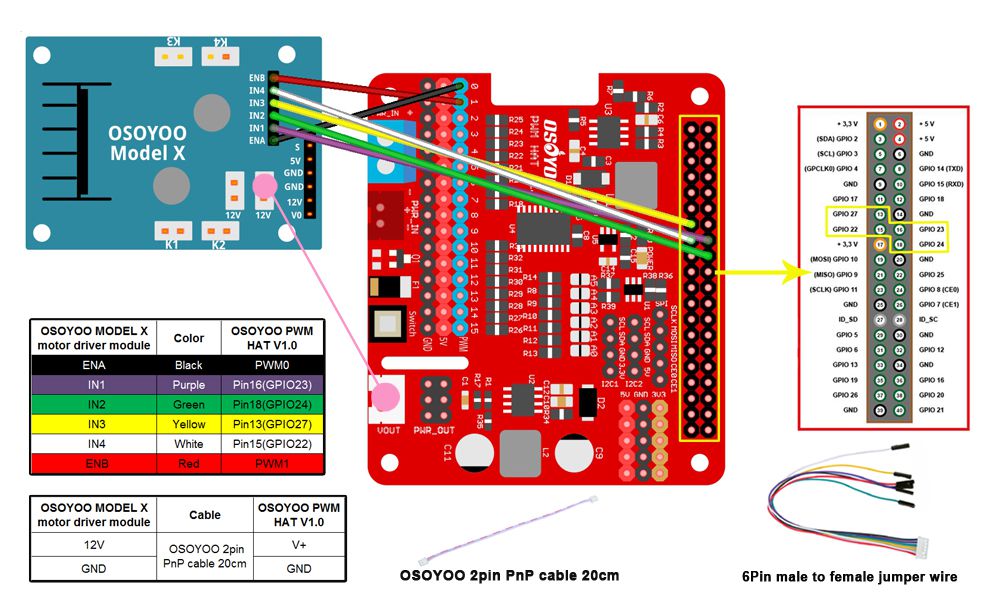
2) Verbinde das OSOYOO MODEL X Motor Driver Modul mit dem OSOYOO PWM Hat V1.0 mittels des 6Pin Female to Female Kabels und dem 2Pin 20cm XH2.54 Female to Female Kabel entsprechend folgendem Bild.
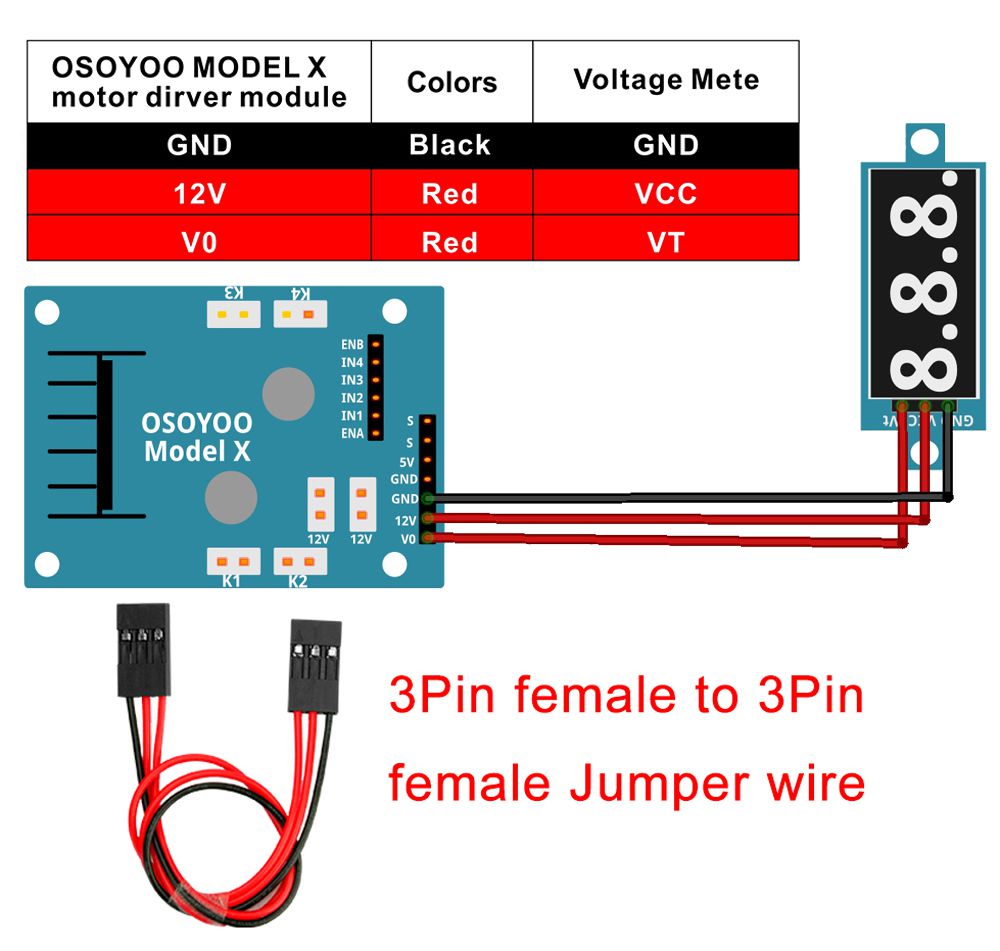
3) Verbinde das Voltmeter über das 3Pin Female to Female Kabel zum OSOYOO MODEL X Motor Driver Modul entsprechend folgendem Bild.
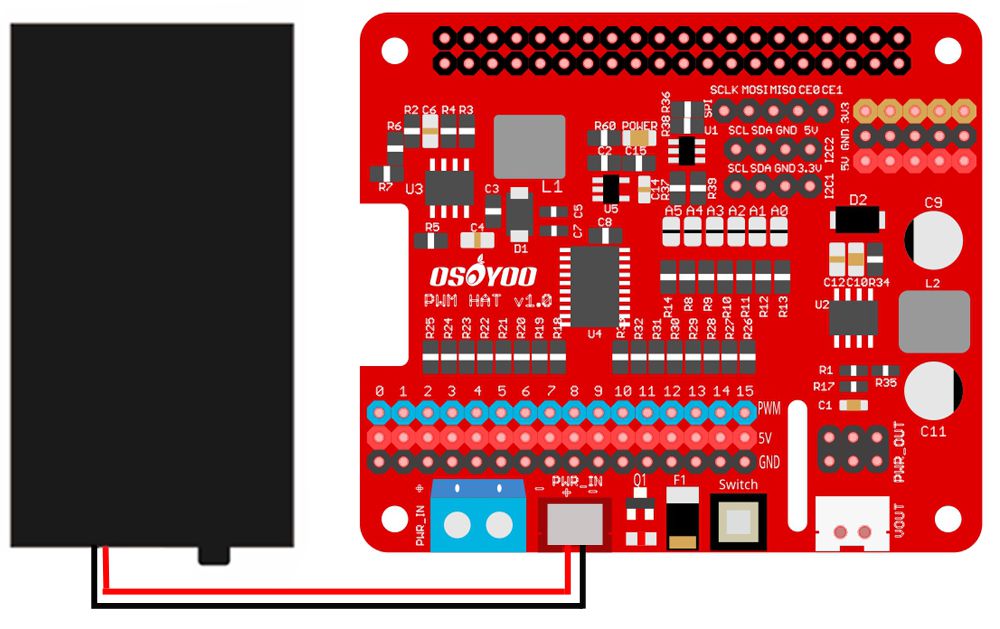
4) Verbinde die 18650 Batterie Box wie unten gezeigt zum OSOYOO PWM Hat V1.0
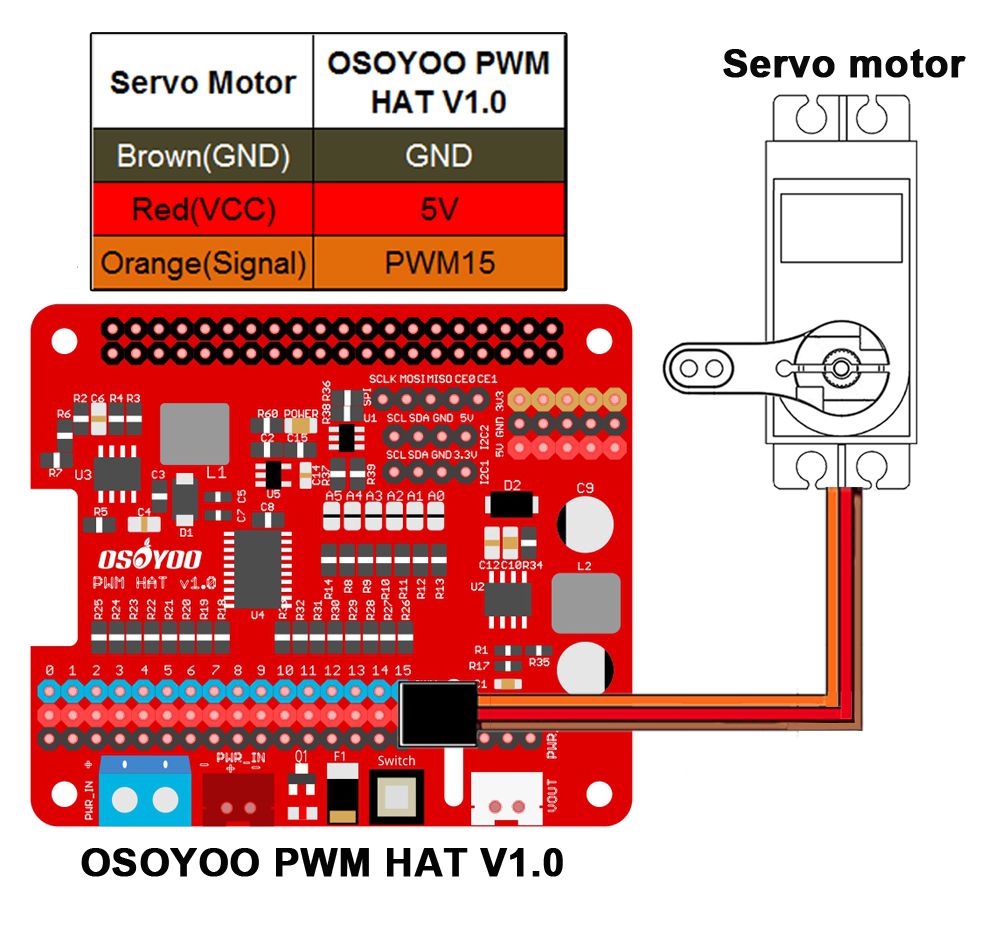
5) Verbinde den Servo Motor zu PWM Pin 15 des OSOYOO PWM Hat V1.0:
6) Schraube mit M3*8 Schrauben und M3 Unterlegscheiben das obere Chassis auf das untere Chassis.
7) Installiere Deine Typ 18650 Batterien in der Batterie Box für 18650 entsprechend folgender Anleitung (Hinweis: Prüfe die Hinweise auf der Box und stelle sicher, dass die Polung der Batterien richtig ist, anderenfalls kann Dein Smart Car beschädigt werden oder sogar Feuer fangen.)
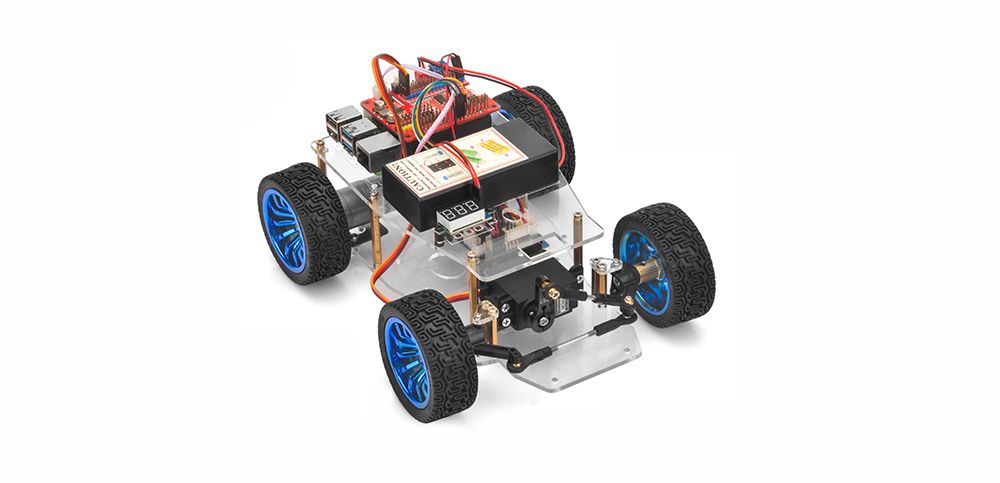
Jetzt ist die Hardwareinstallation fast fertig.










































 Hinweis: Verbinde vor dem Verschrauben von oberem mit unterem Chassis die elektrischen Komponenten . Führe die elektrischen Verbindungen durch die vorbereiteten Ausschnitte des oberen Chassis. Um mehr über die GPIO Pins des Raspberry Pi zu lernen, kannst Du folgende Seite besuchen:
Hinweis: Verbinde vor dem Verschrauben von oberem mit unterem Chassis die elektrischen Komponenten . Führe die elektrischen Verbindungen durch die vorbereiteten Ausschnitte des oberen Chassis. Um mehr über die GPIO Pins des Raspberry Pi zu lernen, kannst Du folgende Seite besuchen: