En esta lección, utilizamos nuestro coche robot Raspberry Pi para conducir automáticamente a lo largo de una línea negra en un suelo blanco. Utilizaremos sensores de seguimiento infrarrojo de 5 puntos para detectar la línea.
No.
Picture
Device
Qty.
Accessories
Link
1
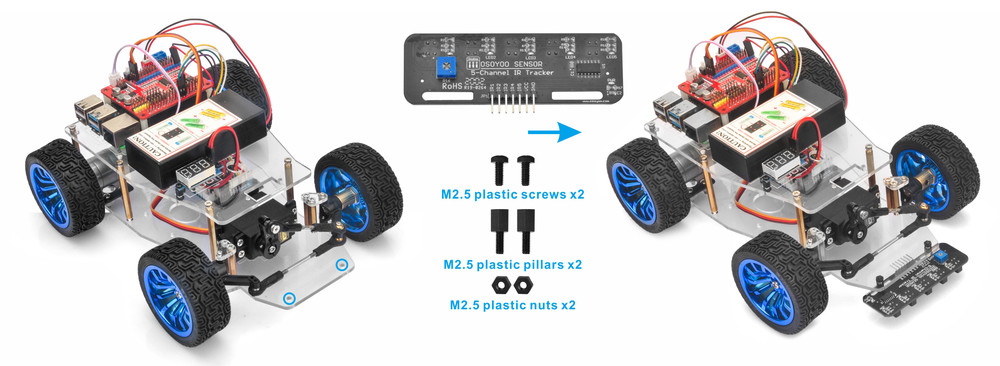
Módulo sensor de seguimiento
1
Tornillo de plástico M2.5 x 2
Tuerca de plástico M2.5 x2
Pilar de plástico M2.5 x 2
Paso 1: Debes completar el trabajo básico de la la Lección 2 .
Paso 2: Instala los módulos de sensores de seguimiento debajo del chasis inferior del coche con 2 tornillos de plástico M2.5, pilares de plástico M2.5 y tuercas de plástico M2.5.
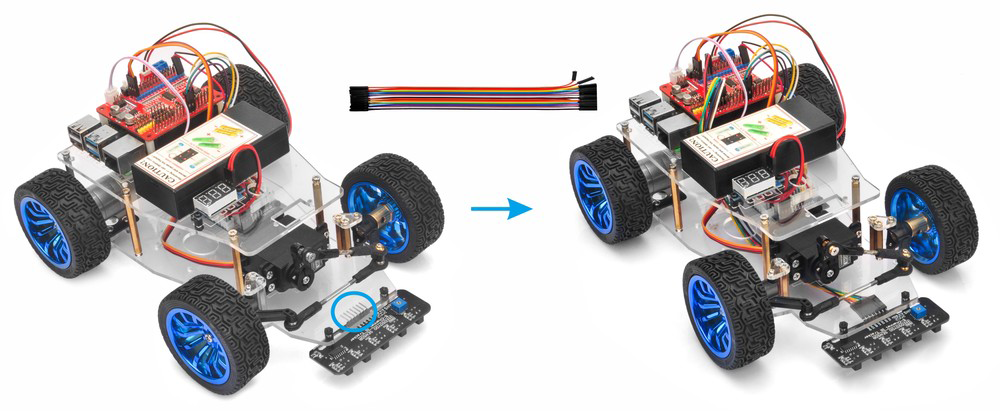
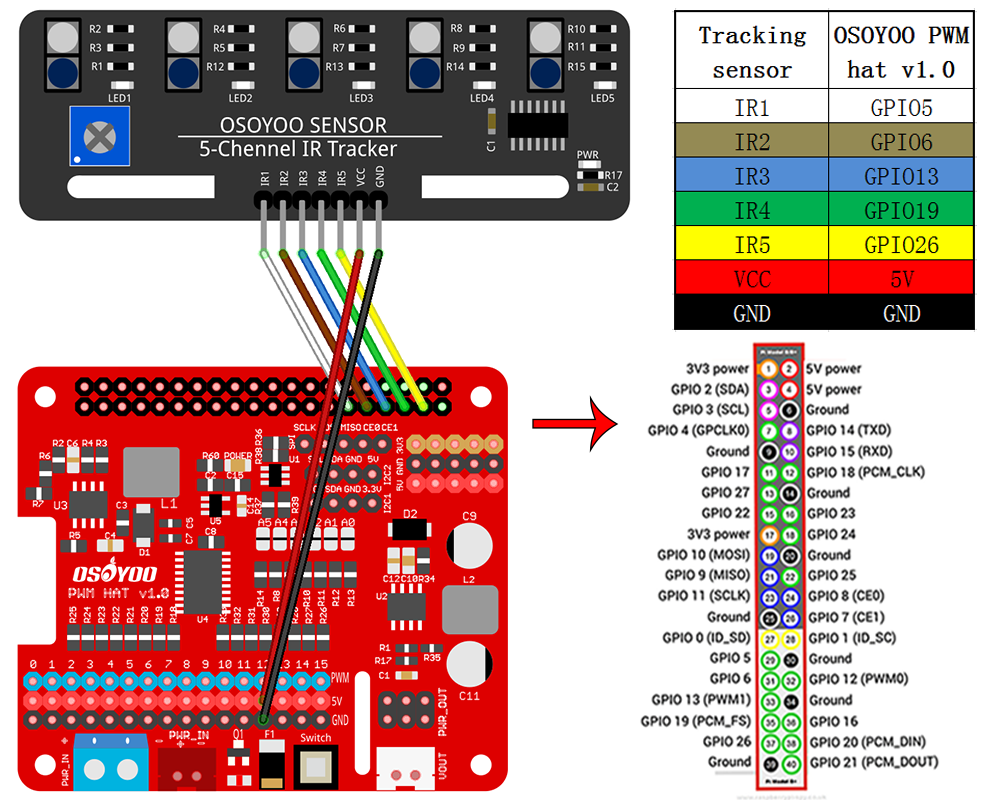
Paso 1: Conecta el pin GND-VCC del módulo de sensor de seguimiento al pin GND-5V de la placa osoyoo PWM HAT; conecta los pines IR1, IR2, IR3, IR4, IR5 a los pines GPIO5, GPIO6, GPIO13, GPIO19, GPIO26 de Raspberry Pi con un cable hembra a hembra de 7 pines y 25 cm como muestra la siguiente foto (Recuerda: NO quites ningún cable existente instalado en la Lección 1):
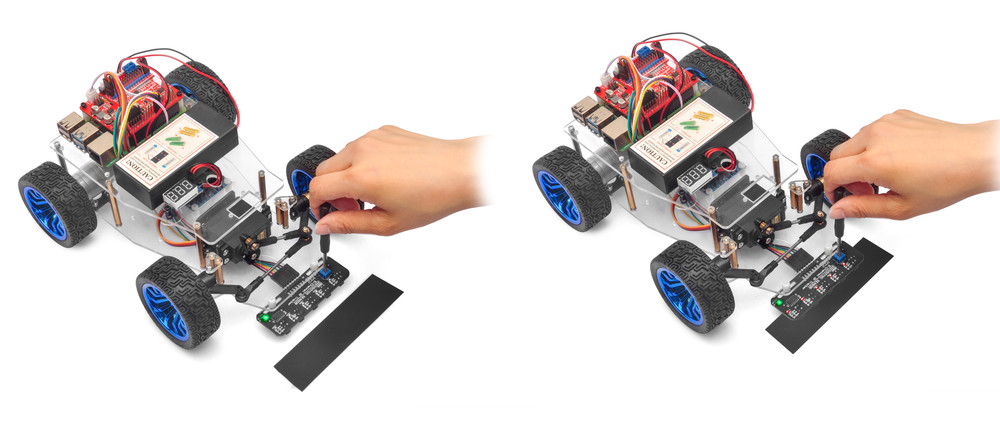
Paso 2: Ajusta la sensibilidad de los módulos de sensores de seguimiento.
Enciende y sostén el coche, y ajusta el potenciómetro del sensor de seguimiento con un destornillador Philips hasta obtener el mejor estado de sensibilidad: la luz indicadora de señal se encenderá cuando el sensor esté sobre la línea negra, y la luz de señal se apagará cuando el sensor esté sobre el suelo blanco.
Descarga el código Python escribiendo el siguiente comando en la terminal de tu Raspberry Pi:
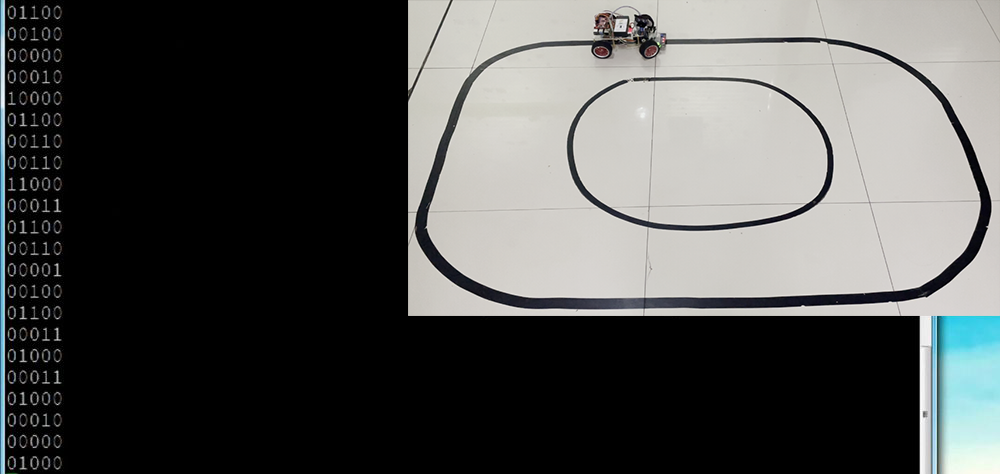
Enciende la batería de tu coche y coloca el coche sobre la línea de pista negra:
Ahora puedes ejecutar el programa Python de seguimiento de línea escribiendo el siguiente comando:
python pi-tracking.py
Tu coche se moverá a lo largo de la línea de pista negra.