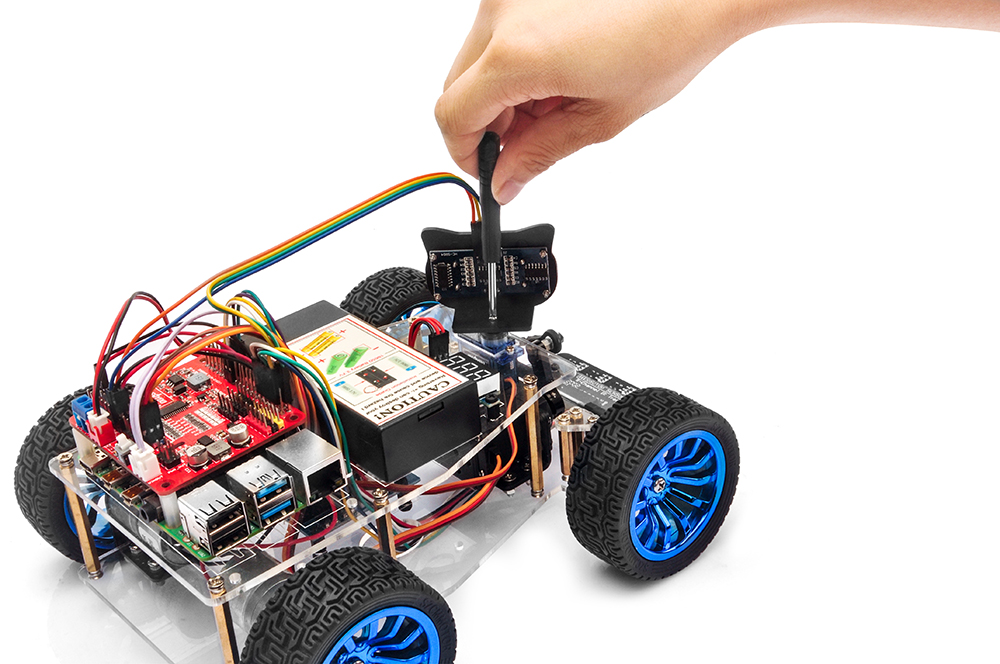
Step 2: Install servo motor at the front of upper car chassis with 2pcs M2.2*8 self tapping screws.
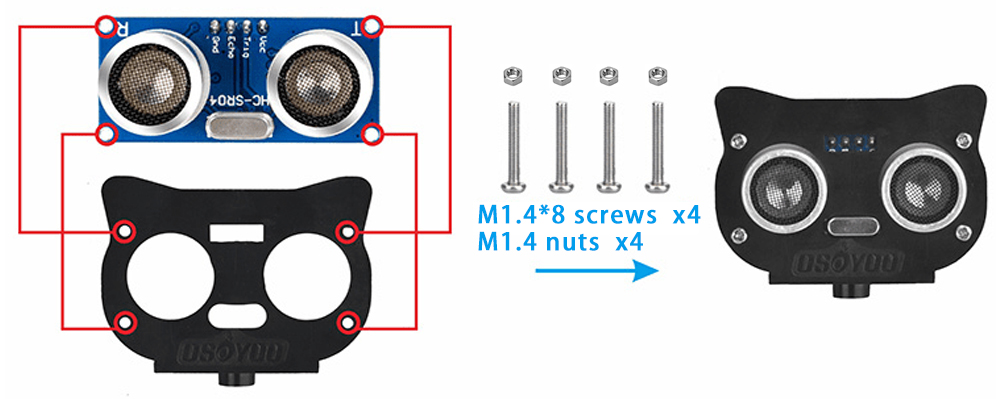
Step 3: Install ultrasonic module to mount holder with 4pcs M1.4*8 screw and M1.4 nuts
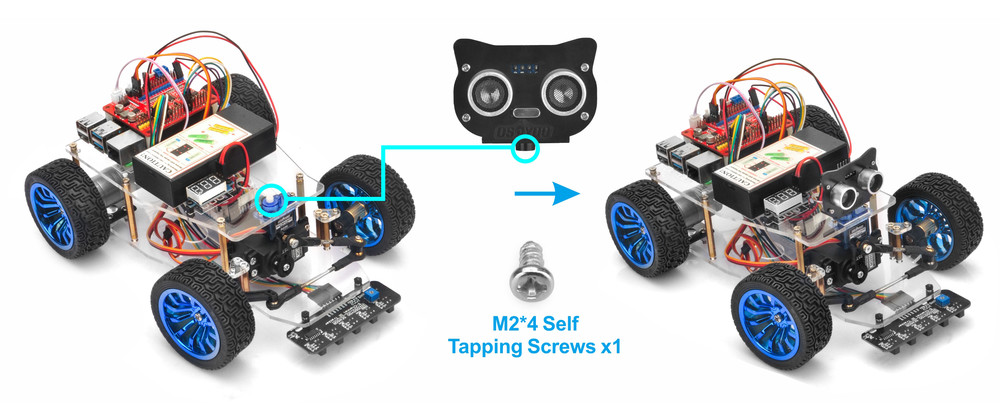
Step 4:Install ultrasonic holder on micro servo motor with 1pcs M2*4 self tapping screw.
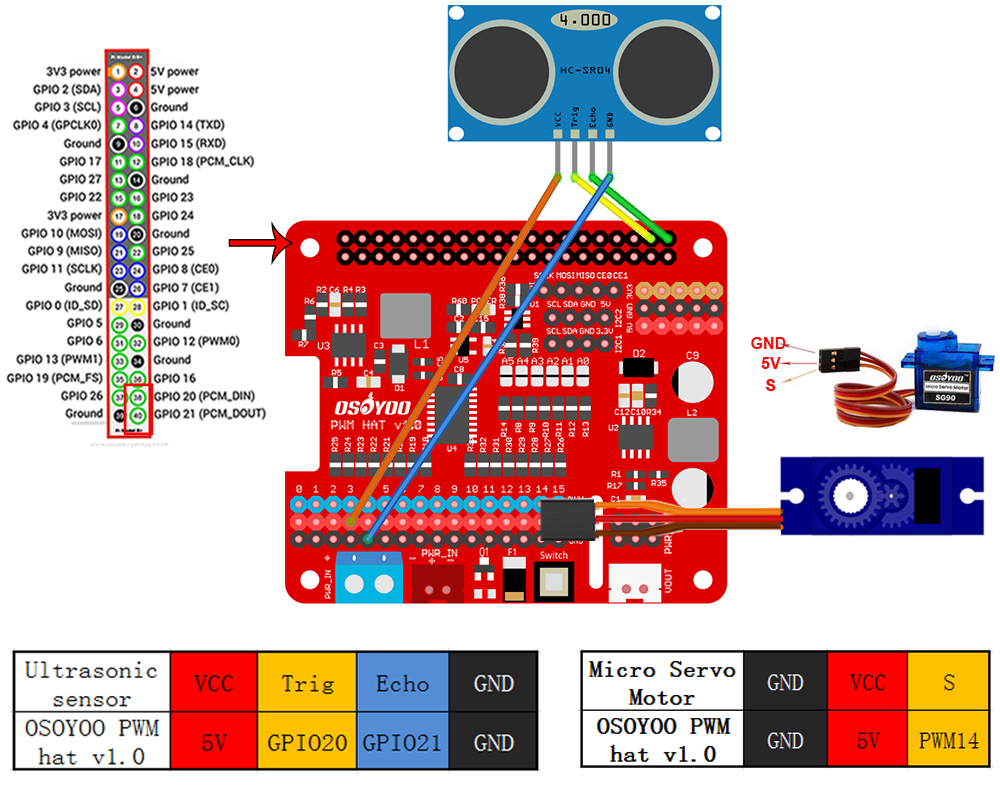
Connect ultrasonic sensor holder SG90 servo motor to PWM 14 port of OSOYOO PWM HAT board, and connect GND and VCC of ultrasonic module to GND and 5V of OSOYOO PWM HAT board, then connect TRIG and ECHO of ultrasonic module to GPIO20 and GPIO21 of raspberry pi as following graph (Remember : DO NOT remove any existing wires installed in Lesson 1 ):
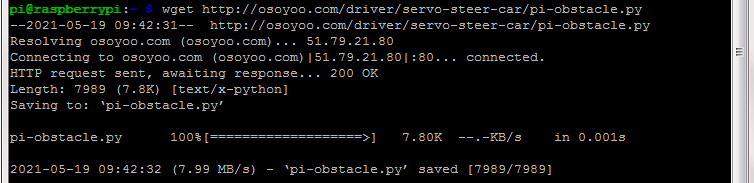
Download the python code by typing following command in your Raspberry Pi terminal:
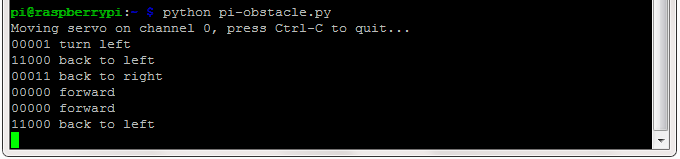
Turn on the battery of your car and your servo and run the program,
If you are using Python 2 in Raspberry Pi , type:
python pi-obstacle.py
Your servo will rotate the ultrasonic sensor to front position for 3 seconds. If your sensor is not facing front direction, please turn off the battery or press Ctrl-C key to stop the program. Then remove the sensor from servo and re-install it, make sure it faces front and fix the position with screw, now your can type same command python pi-obstacle.py and run the program again.
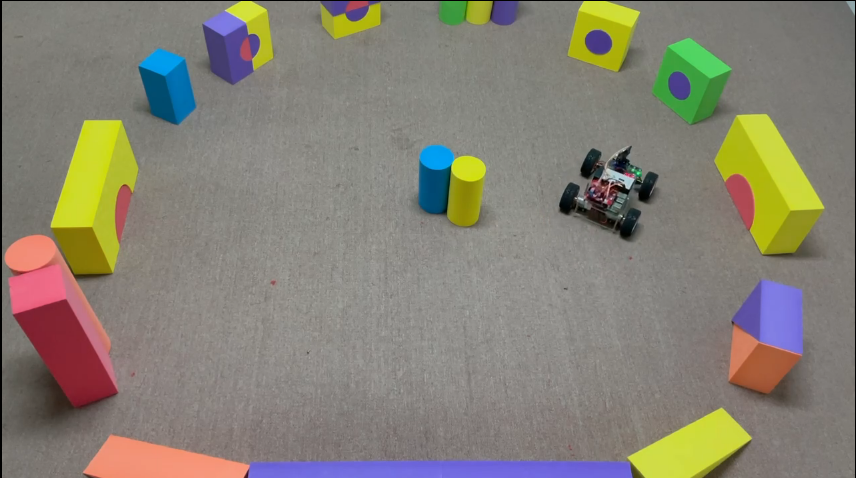
Now the car will automatically make obstacle avoidance auto driving.