En este tutorial, usaremos el Kit Robot OSOYOO Auto Deportivo para Arduino para realizar algunos movimientos simples. Una vez que se completa la instalación del Robot, es muy importante probar la instalación y el código de muestra. Si ha pasado el movimiento de prueba de esta lección, significa que la placa básica OSOYOO para Arduino, el escudo de control del motor, los motores, las baterías, el chasis y las conexiones de cables entre estas partes funcionan bien.
Si usted no completó el trabajo del Robot, revise la Lección 1.
Paso 1: descargue el archivo zip de la biblioteca PWMServo desde https://osoyoo.com/driver/sg90car/PWMServo.zip , luego importe la biblioteca al IDE Arduino (Abra el IDE Arduino -> haga clic en Programa->Incluir Librería -> Añadir Biblioteca .Zip)
Verá una ventana emergente, ahora puede ir a su carpeta de descarga y seleccionar el archivo PWMServo.zip y cargar este archivo en la biblioteca de Arduino.
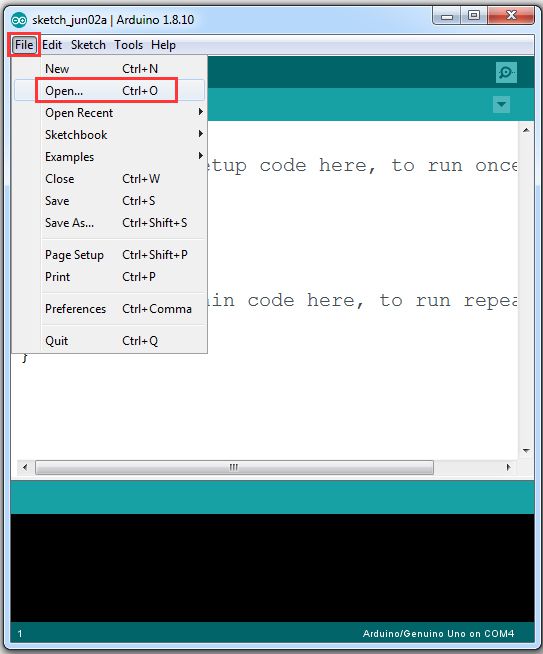
Paso 2: descargue el código de muestra de la lección 2 , descomprima el archivo zip de descarga sg90car-lesson2b.zip, luego verá una carpeta llamada sg90car-lesson2. Paso 3: conecte la placa Arduino UNO R3 a la PC con un cable USB, abra el IDE Arduino -> haga clic en Archivo -> haga clic en Abrir -> elija el código “sg90car-lesson2.ino” en la carpeta
sg90car-lesson2 y cargue el código en la placa básica OSOYOO para Arduino . Aviso: apague la batería o desconecte el adaptador de corriente cuando cargue el código en la placa básica OSOYOO para Arduino.
Paso 4: cambie el valor predeterminado 90 en la línea 19 como el valor FRONTAL en la Lección 1. Si está alineada la dirección de la rueda manualmente como la opción 1 en el Paso 5 de la Lección 1, omita este paso.
#define FRONT 90 // dirección al frente
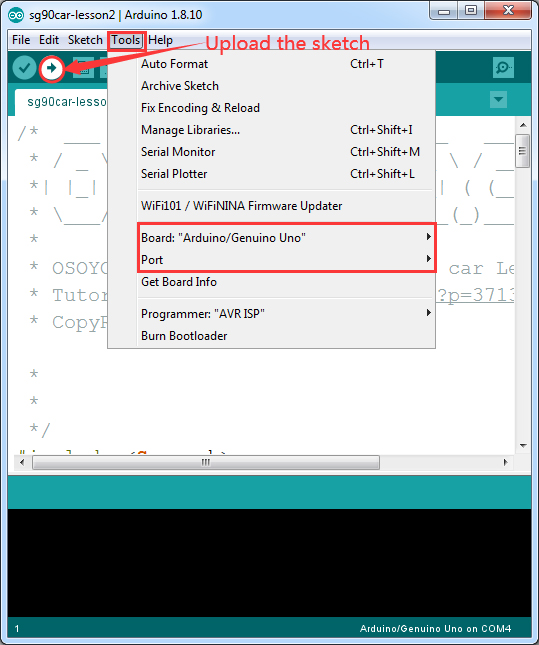
Paso 5: elija la placa/puerto correspondiente para su proyecto, luego cargue el código en la placa.
Pruebas finales
1. Desconecte la placa básica OSOYOO para Arduino de la PC y confirme que el interruptor de encendido del escudo OSOYOO Motor V1.1 esté apagado, luego coloque una batería de 9V en la caja de la batería. (Nota: asegúrese de que la posición de la batería sea correcta, de lo contrario, puede destruir su dispositivo y provocar un riesgo de incendio) .
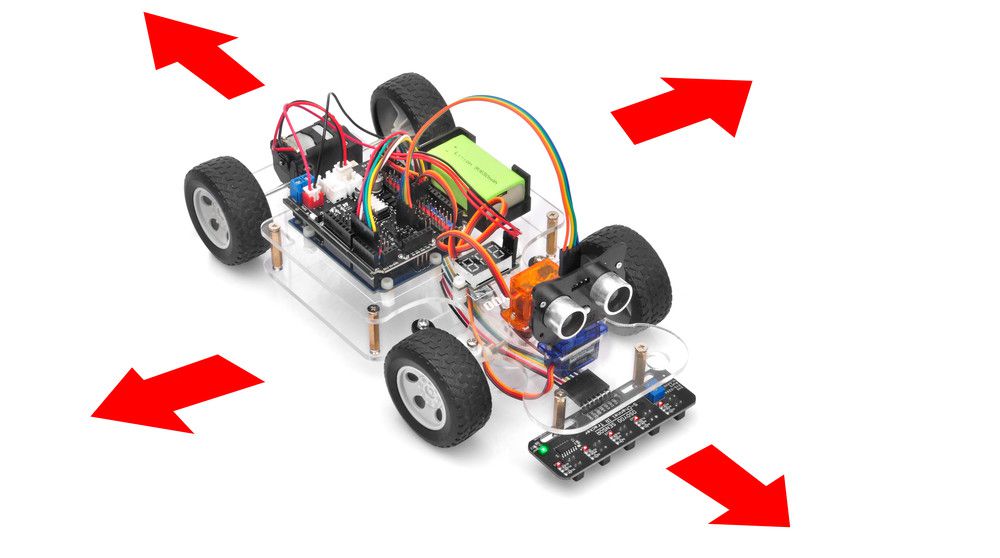
2. Coloque el Robot en el suelo, encienda el interruptor del escudo OSOYOO Motor V1.1, el auto debe avanzar, retroceder, girar a la izquierda, girar a la derecha, retroceder, volver a la derecha, volver a la izquierda y luego detenerse. Nota: Si el Robot no se mueve según el resultado mencionado anteriormente, debe verificar la conexión de los cables, las tapas de los puentes en el escudo OSOYOO Motor V1.1 y el voltaje de la batería (debe ser superior a 7,2 V).
3. Si desea cambiar el giro de la derecha o de la izquierda, edite las líneas 20 y 21 del código y vuelva a cargar el código: (Nota: el giro no se puede configurar más de 35. Como las ruedas traseras se conducen sin un eje trasero diferencial entre el motor y las ruedas. Pero las cuatro ruedas tienen un buen agarre en el suelo. Cuanto más se giran las ruedas delanteras hacia la izquierda o hacia la derecha, más frenan las ruedas traseras. Con un cierto ángulo, esta fuerza de frenado es mayor que la fuerza impulsora del motor, entonces el motor se detendrá).
int SHARP_RIGHT=FRONT+33;
int SHARP_LEFT=FRONT-33;
4. Si desea cambiar la velocidad del Robot, revise el siguiente código ( Nota: el valor máximo es 255 )