¡Bienvenido a la primera lección del Kit Robot Osoyoo Auto Deportivo para Arduino!
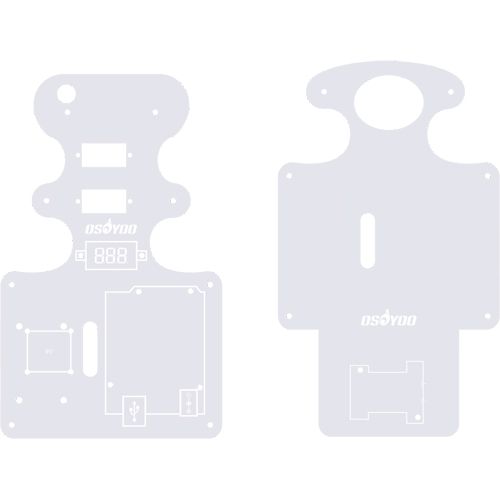
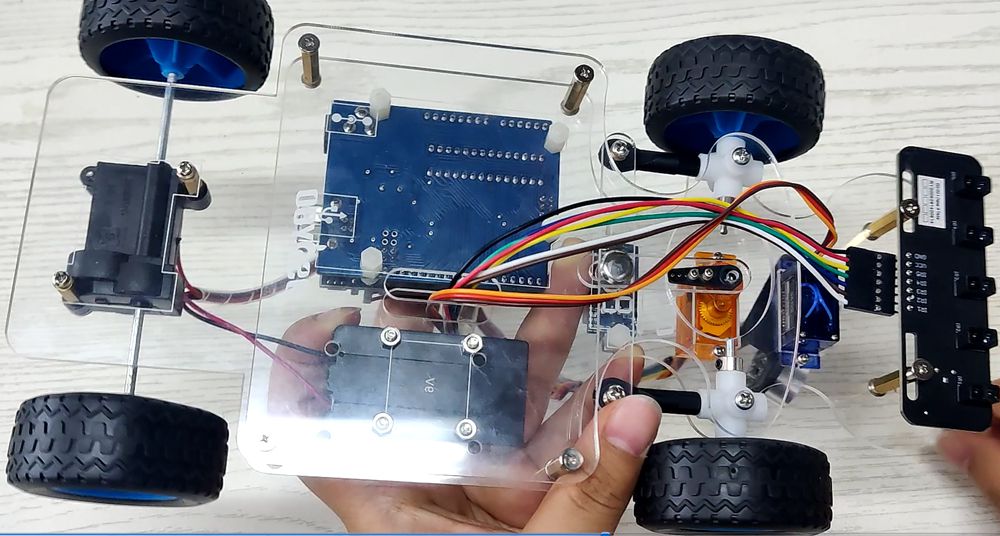
En esta lección, instalaremos la estructura del Robot y alinearemos el servo de dirección para que el auto quede al frente.
Como sus experimentos en lecciones futuras se basan todos en el marco de trabajo de la Lección 1, es muy importante probar correctamente la instalación y el código de muestra en esta Lección.
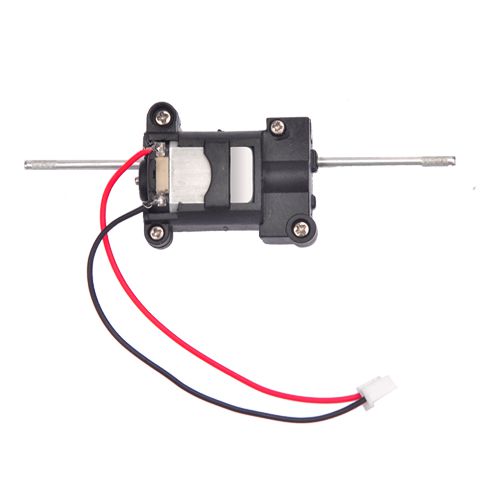
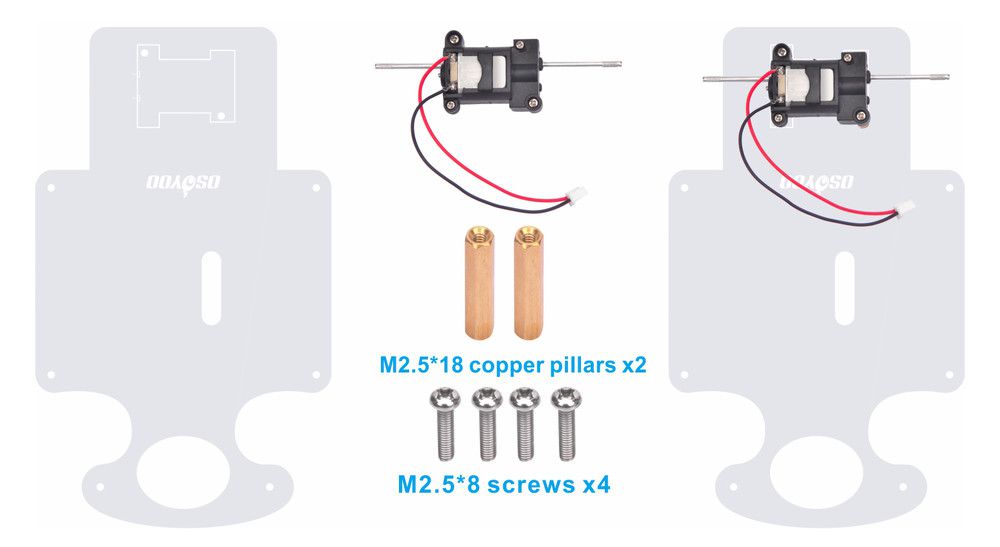
2. Fije el motor en el chasis inferior con 2 pilares de cobre M2.5*18 y 4 tornillos M2.5*8 de la siguiente manera:
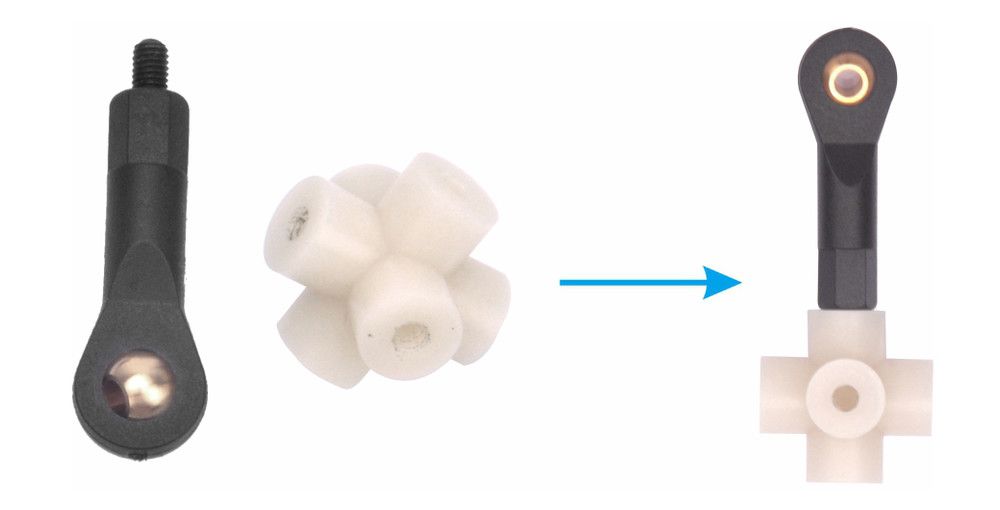
3. Conecte la copa de dirección con el cojinete del extremo de la barra de la siguiente manera (Atención: se utilizan dos orificios que se pueden cruzar de un lado al otro para fijar la rueda; no instale piezas en estos dos orificios) :
4. Instale los 2 cojinetes de extremo de la barra en la biela acrílica larga de la siguiente manera:
5. Instale el brazo palanca negro del servo (del paquete del servomotor naranja) en la biela corta de acrílico de la siguiente manera:
6. Instale la biela corta acrílica en la biela larga acrílica con remache de metal M5*6 de la siguiente manera:
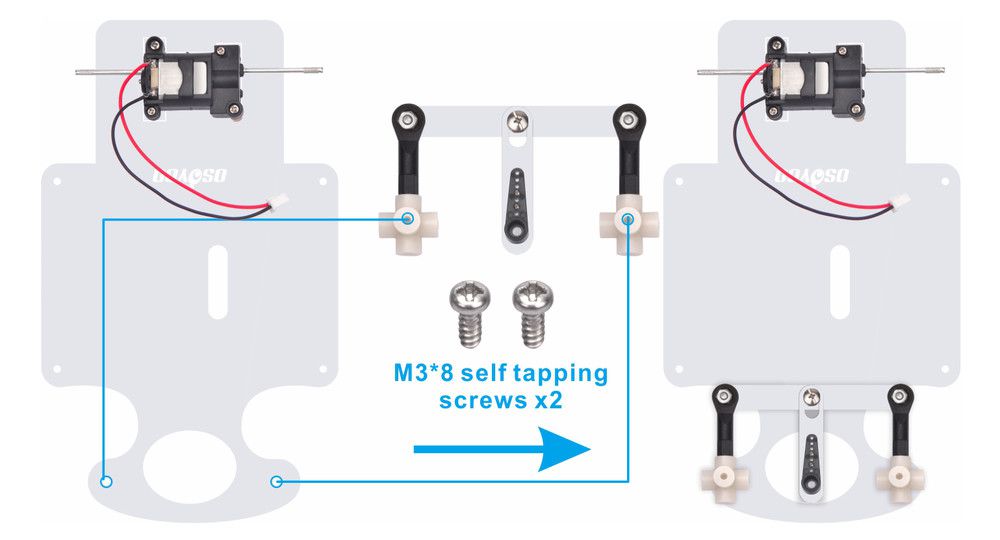
7. Fije las 2 piezas de la copa de dirección en el chasis inferior con 2 tornillos autorroscantes M3*8 de la siguiente manera:
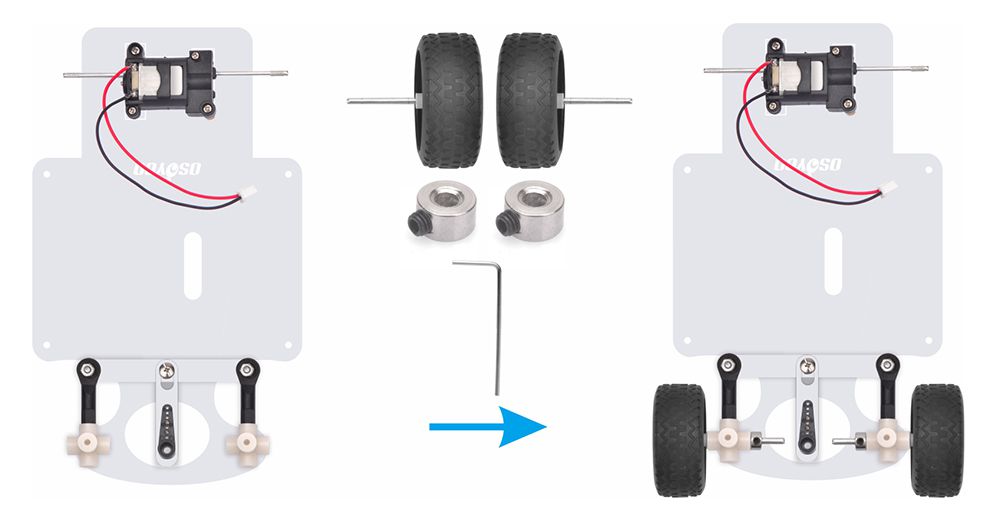
8. Instale las ruedas con la varilla de metal de la siguiente manera:
9. Instale las ruedas de 2 piezas a través de la copa de dirección y use una llave tipo L para fijarlas con la manga de metal de la siguiente manera:
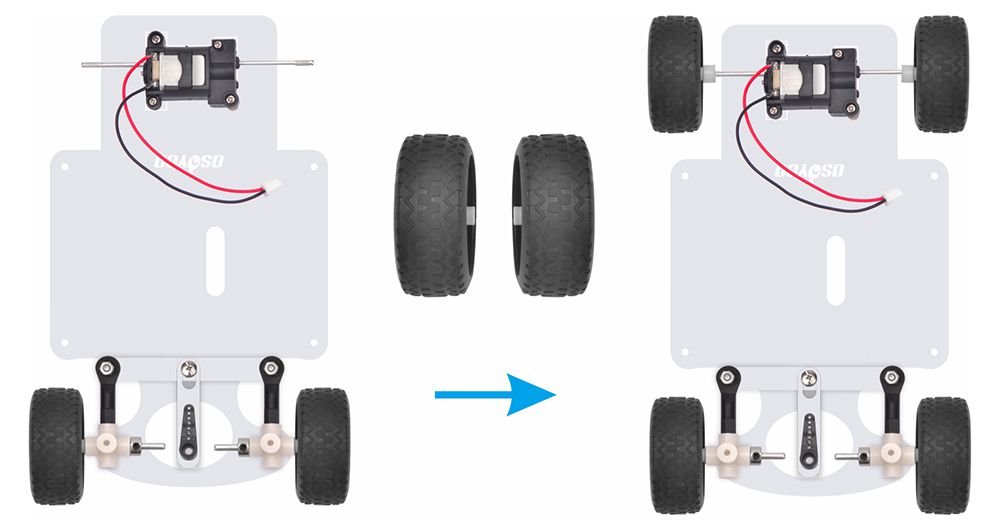
10. Instale las otras 2 ruedas en el motor de la siguiente manera:
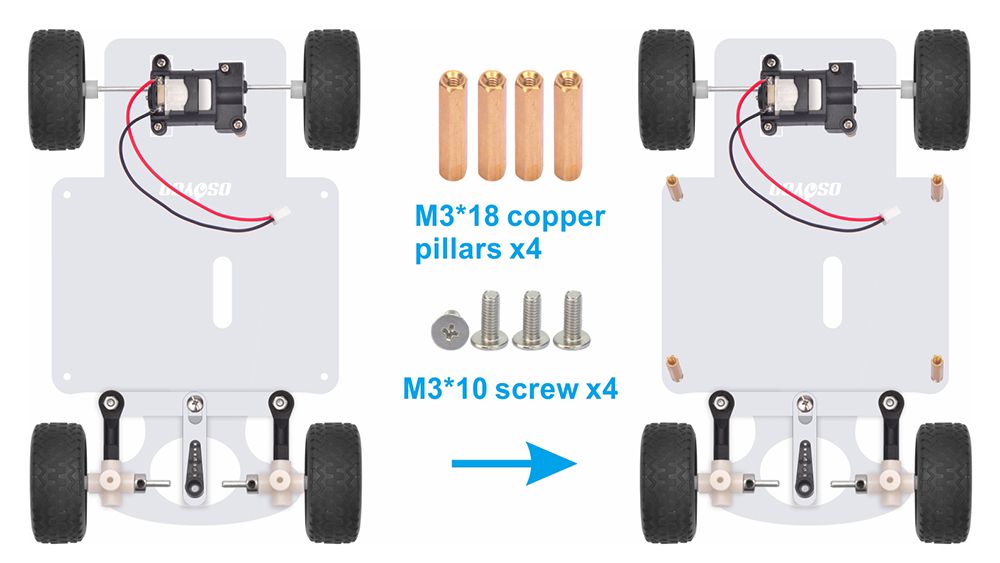
11. Instale los 4 pilares de cobre M3*18 en el chasis inferior del Robot con tornillos M3*10 de la siguiente manera:
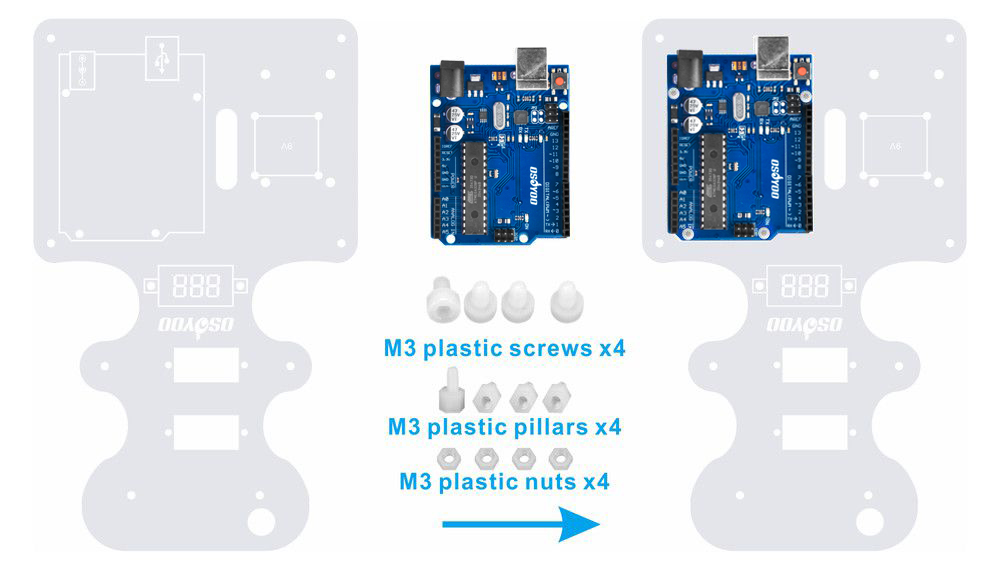
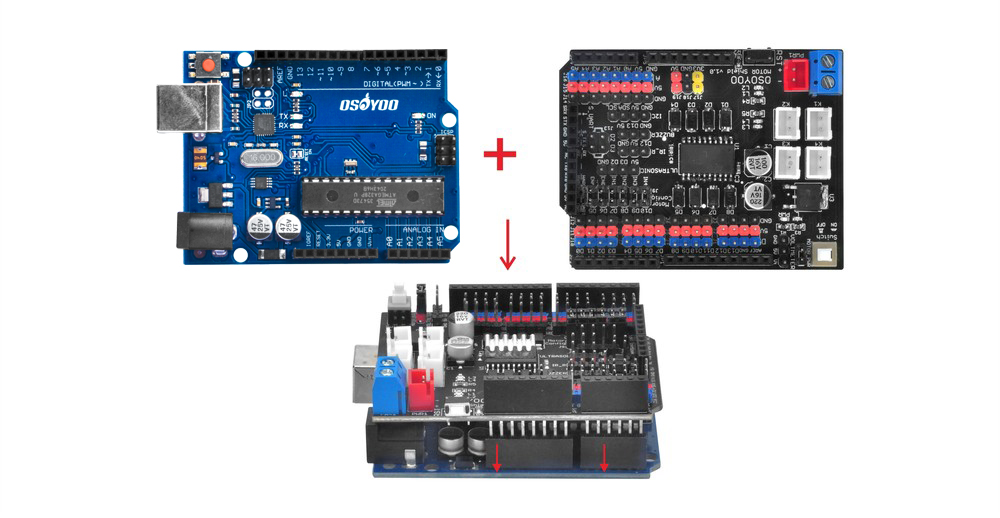
12. Use un destornillador hexagonal para instalar la placa OSOYOO UNO en el chasis superior del Robot con tornillos, pilares y tuercas de plástico M3 de la siguiente manera:
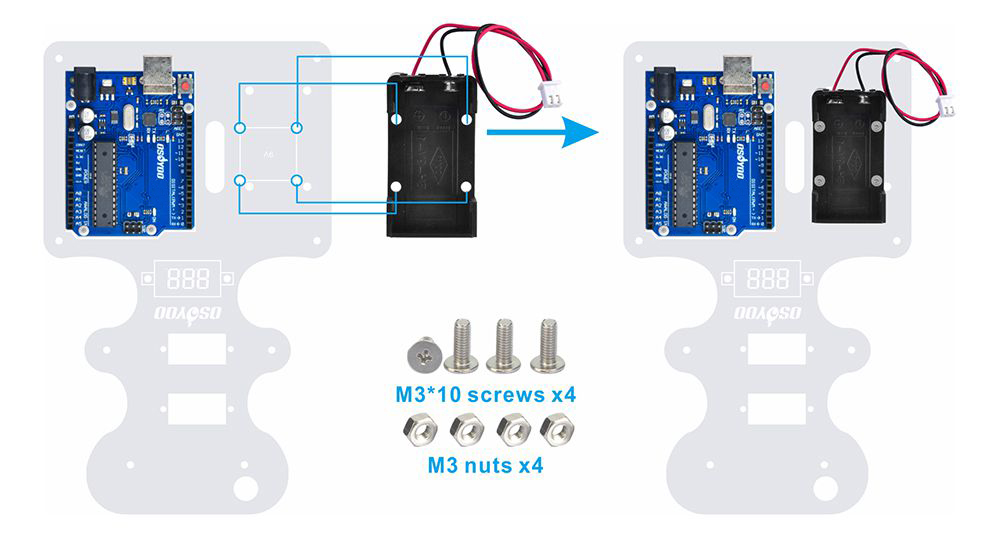
13. Instale la caja de la batería de 9 V en el chasis con tornillos y tuercas Phillips M3 de la siguiente manera:
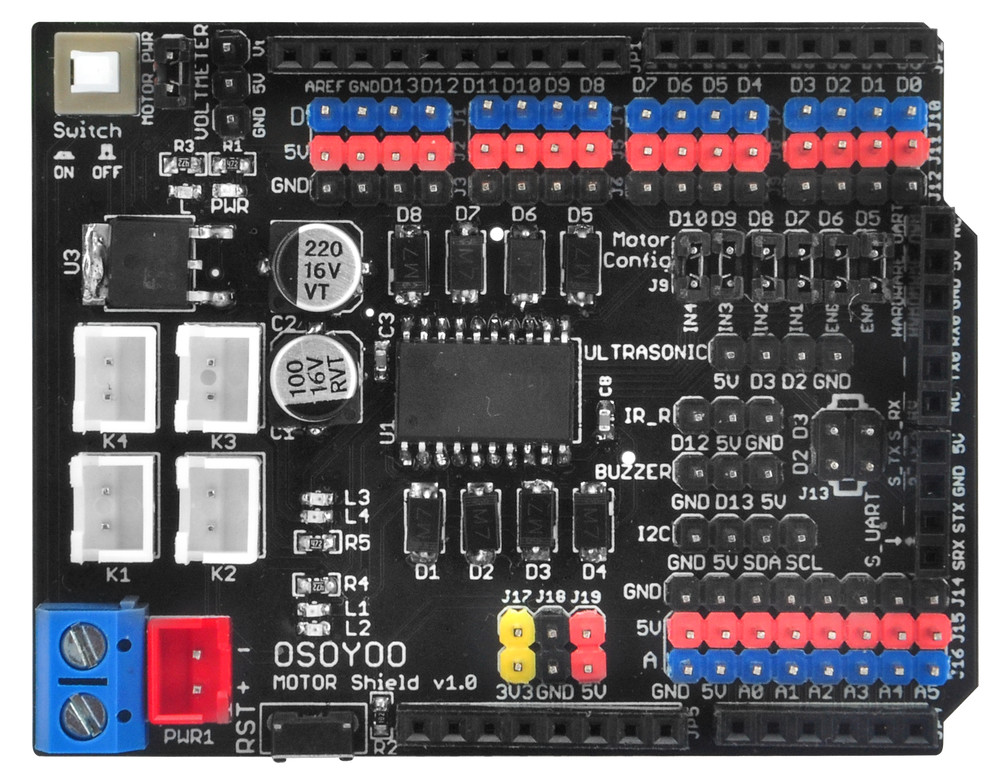
14. Inserte el escudo OSOYOO Motor V1.1 en la placa OSOYOO UNO de la siguiente manera:
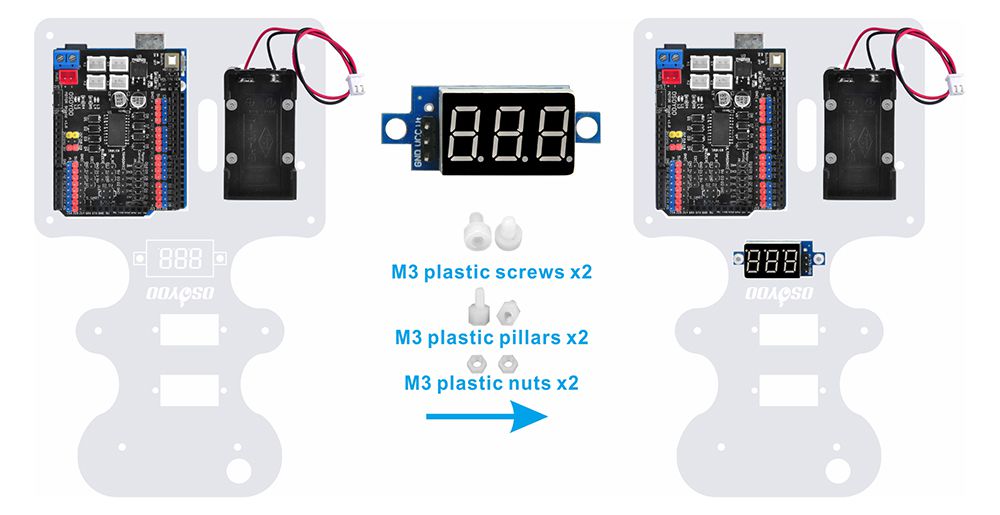
15. Instale el medidor de voltaje en el chasis con tornillos, pilares y tuercas de plástico M3 de la siguiente manera:
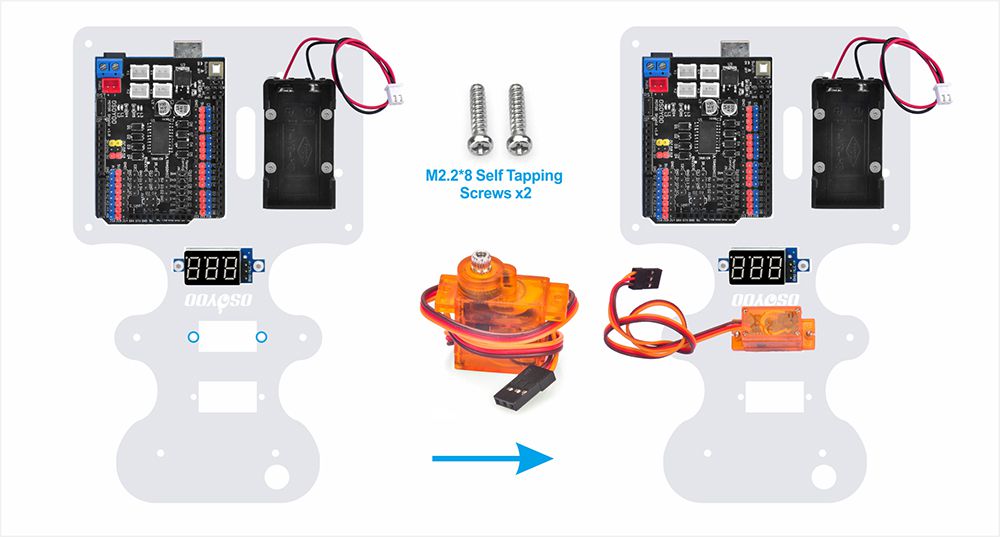
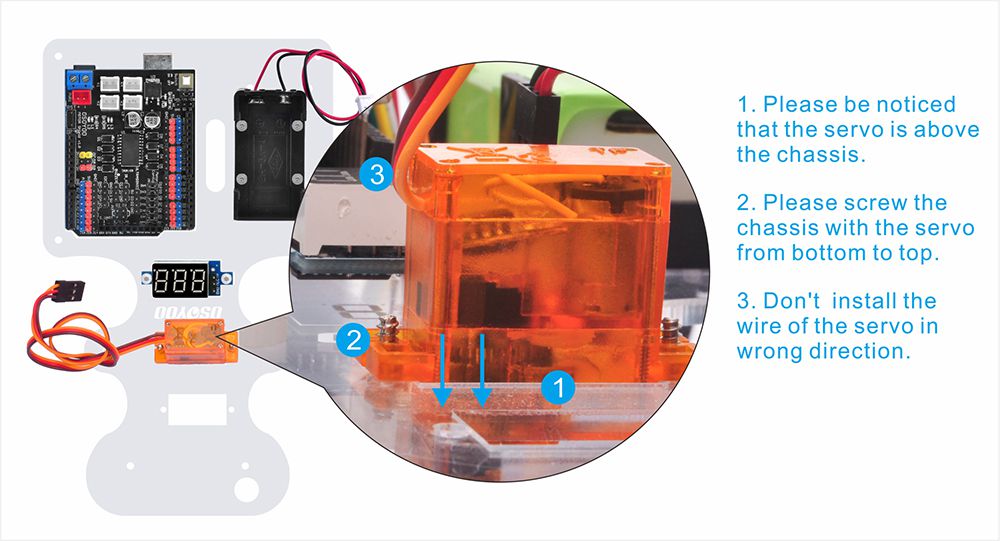
16. Instale el servo motor MG90S (de color naranja) en el chasis superior del Robot de arriba hacia abajo con 2 tornillos autorroscantes M2.2*8 de la siguiente manera:
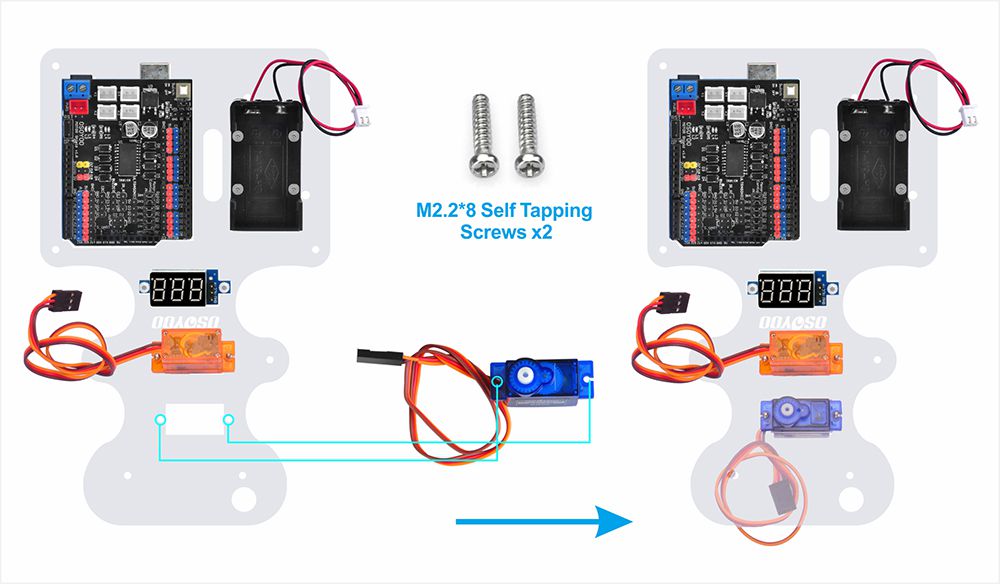
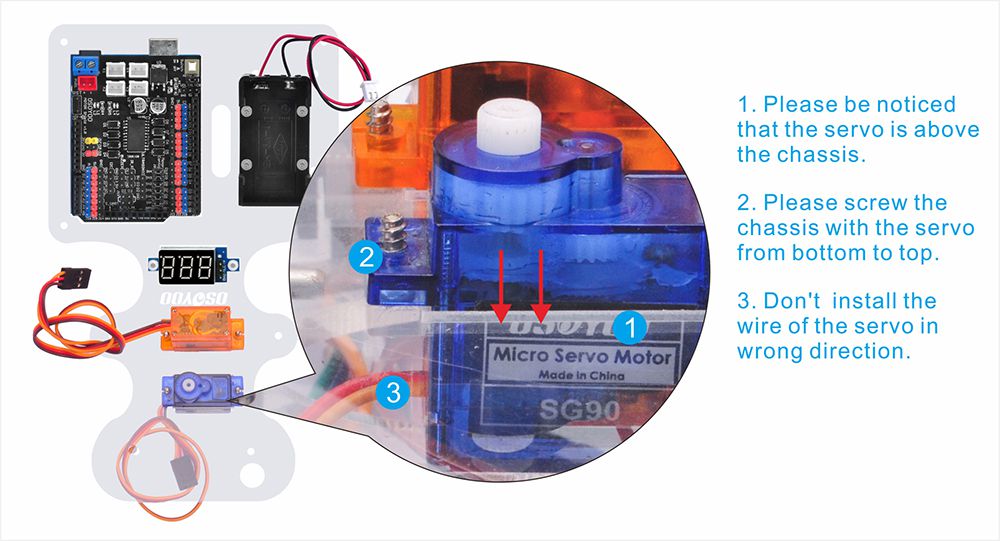
17. Instale el servo motor (de color azul) en el chasis superior del Robot de abajo hacia arriba con 2 tornillos autorroscantes M2.2*8 de la siguiente manera:
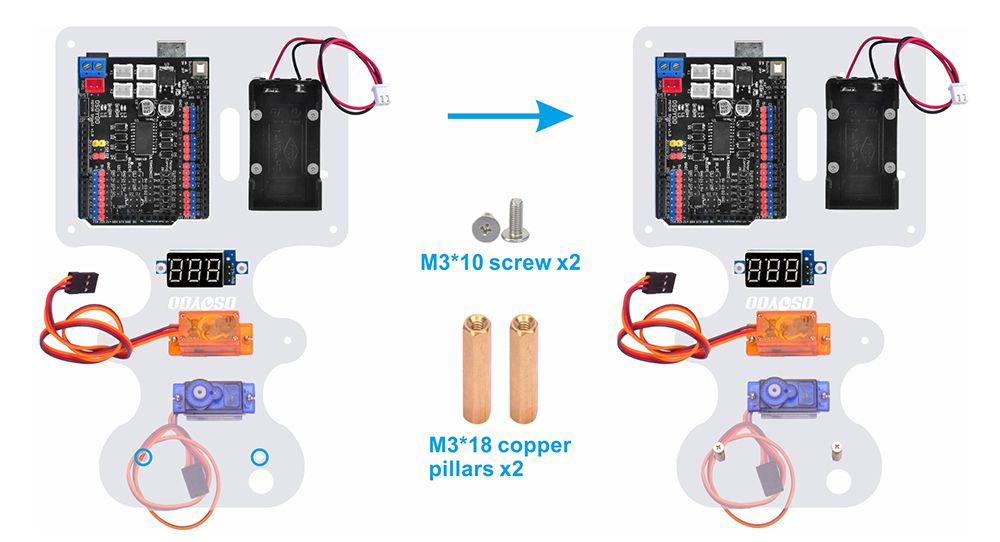
18. Instale los 2 pilares de cobre M3*18 debajo del chasis superior del Robot con 2 tornillos M3*10 de la siguiente manera:
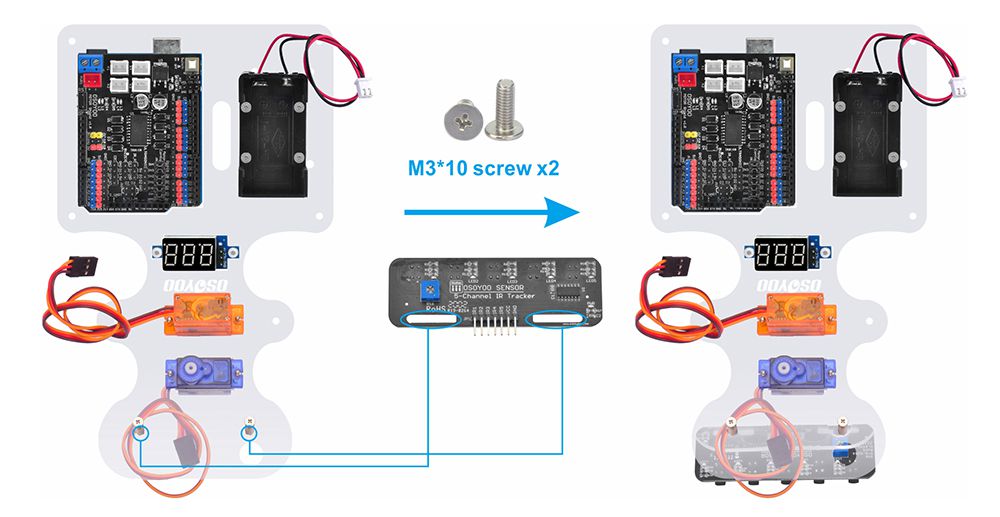
19. Instale el módulo del sensor de seguimiento debajo de los pilares de cobre M3*18 con 2 tornillos M3*10 de la siguiente manera:
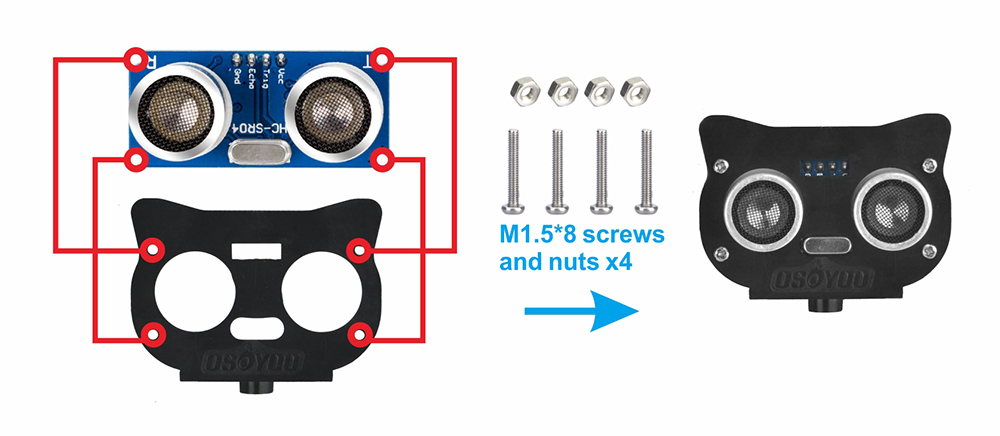
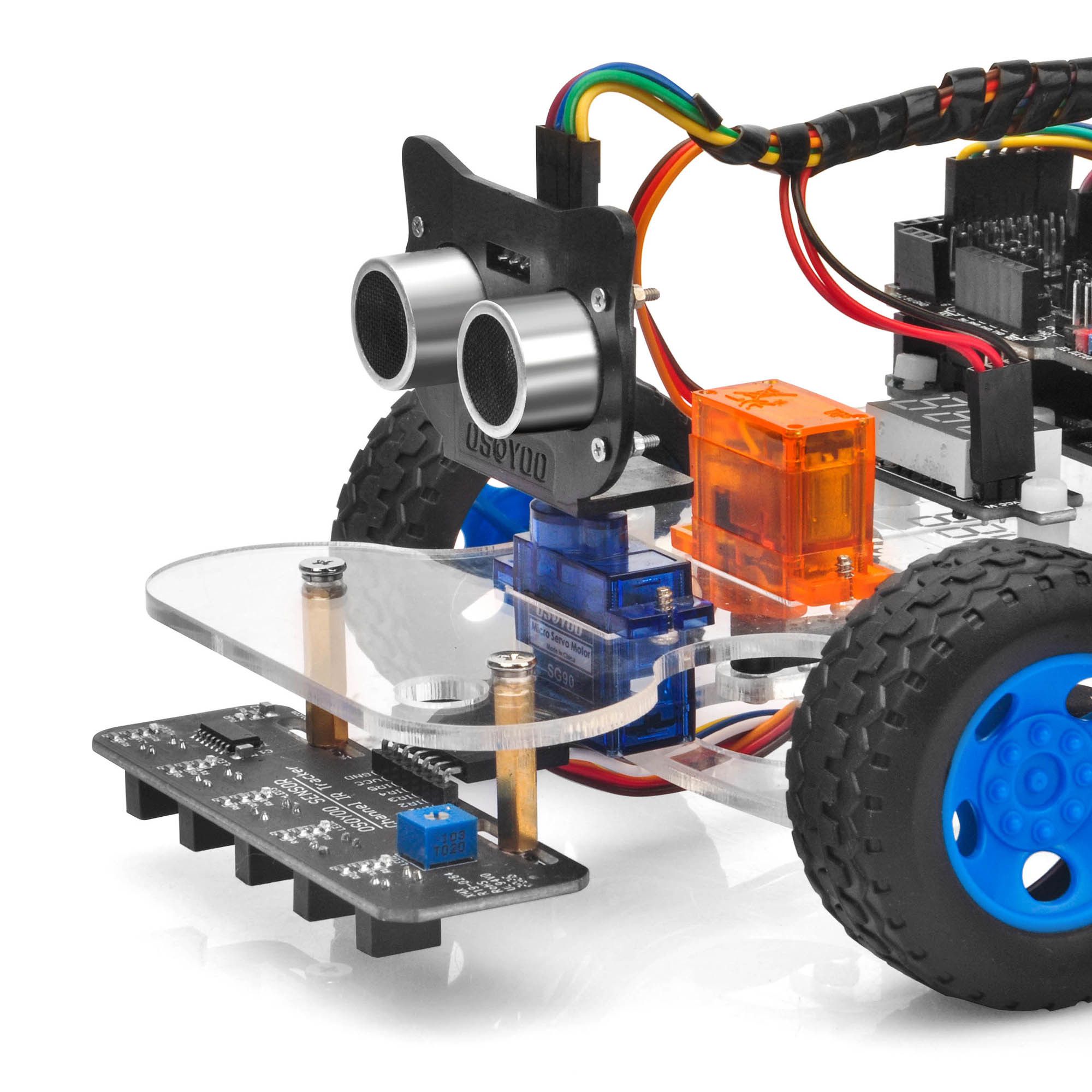
20. Instale el módulo ultrasónico para montar el soporte con 4 tornillos M1.5*8 y tuercas M1.5 de la siguiente manera:
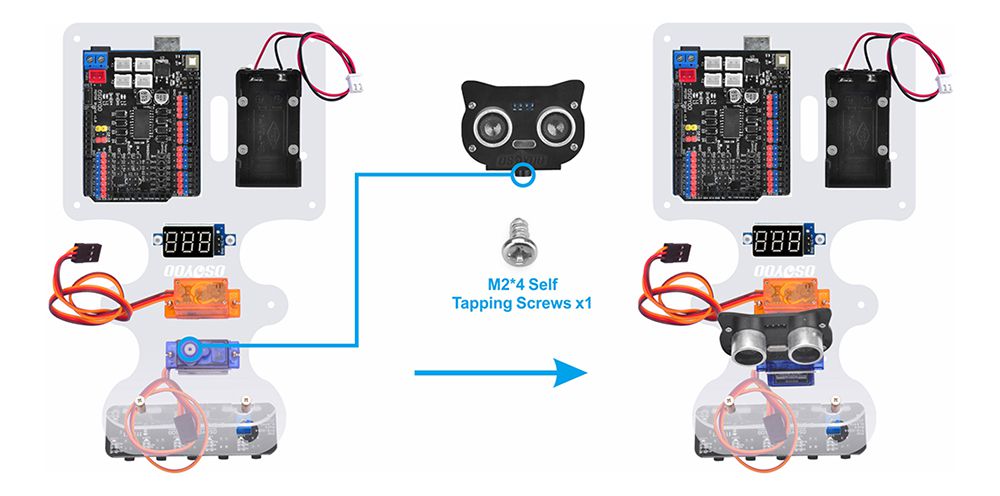
21. Instale el soporte de montaje para el módulo ultrasónico en el servomotor con el tornillo autorroscante M2*4 de la siguiente manera:
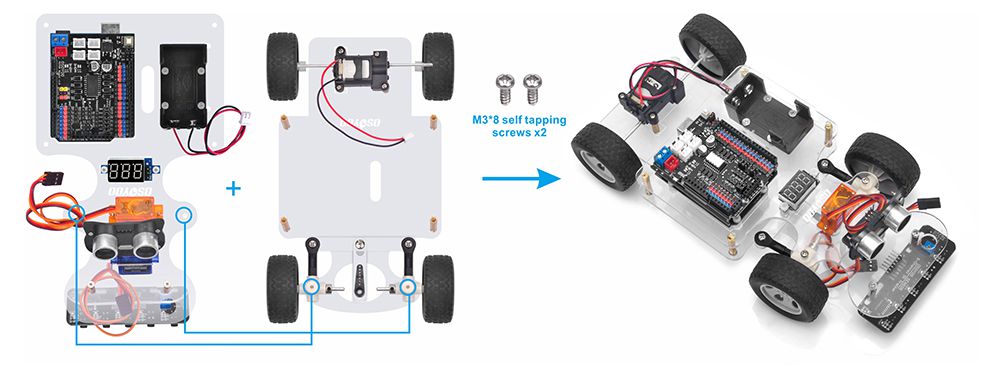
22. Fije la copa de dirección debajo del chasis superior del Robot con 2 tornillos autorroscantes M3*8 de la siguiente manera (Nota: después de fijar la copa de dirección en el chasis superior, aún debe ser posible girar fácilmente la copa de dirección alrededor del eje del tornillo) :
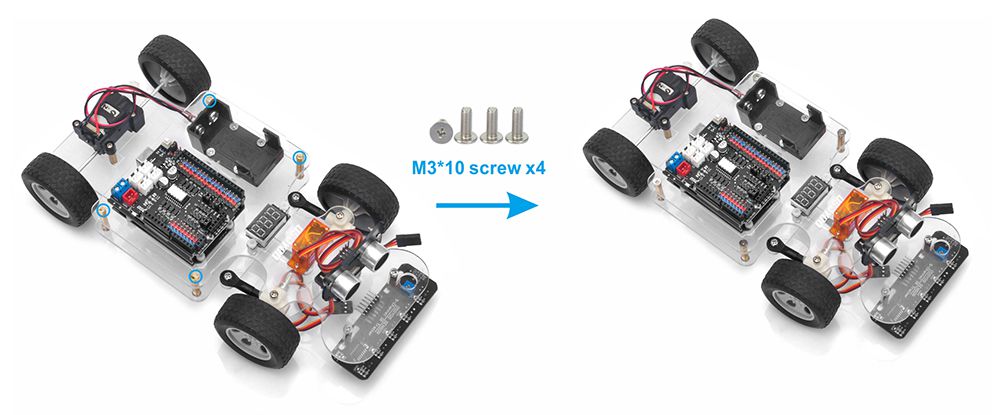
23. Fije el chasis superior del Robot y el chasis inferior del automóvil con 4 tornillos M3*10 de la siguiente manera:
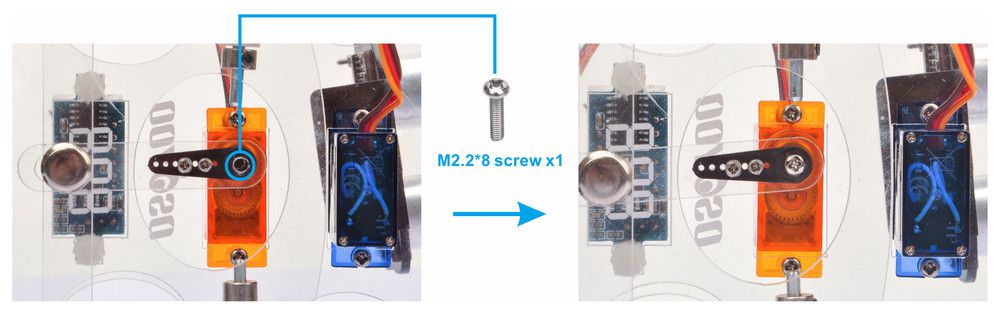
24. Fije el servomotor MG90S (de color naranja) en la palanca negra del servo con 1 tornillo autorroscante M2.2*8 de la siguiente manera:
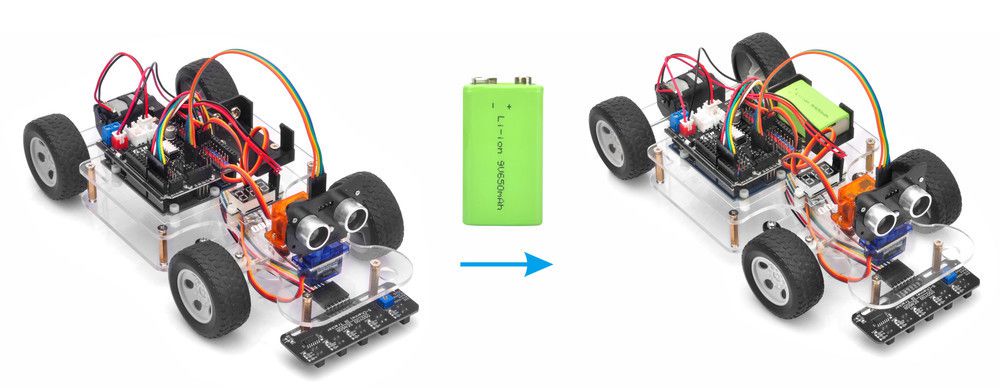
24. Instale la batería de 9V de la siguiente manera:
Conexión
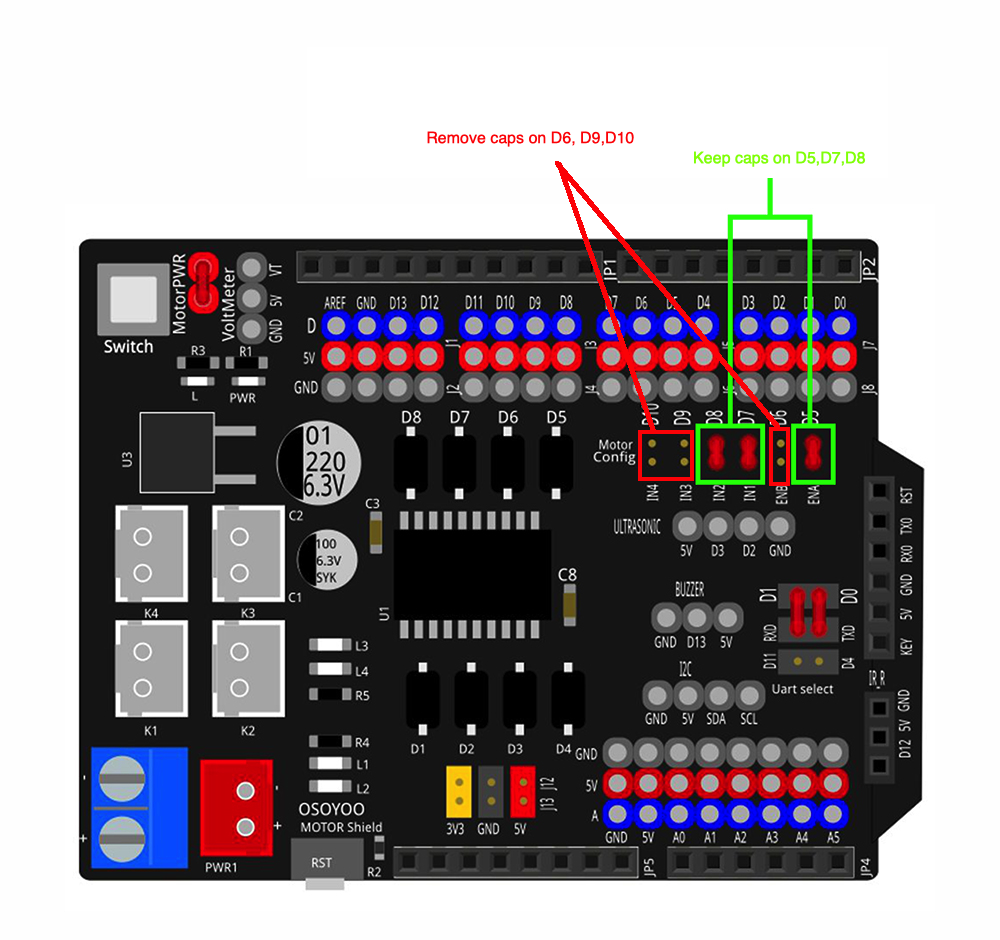
1)Retire las tapas de los puentes en ENB-D6, IN3-D9, IN4-D10
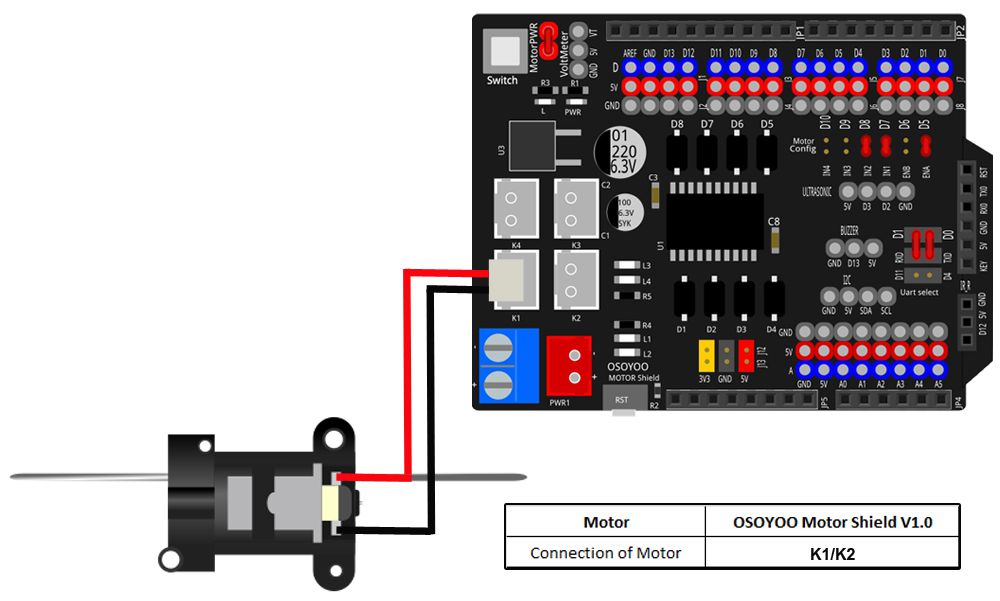
2) Conecte el motor a K1 o K2 del escudo OSOYOO Motor V1.1:
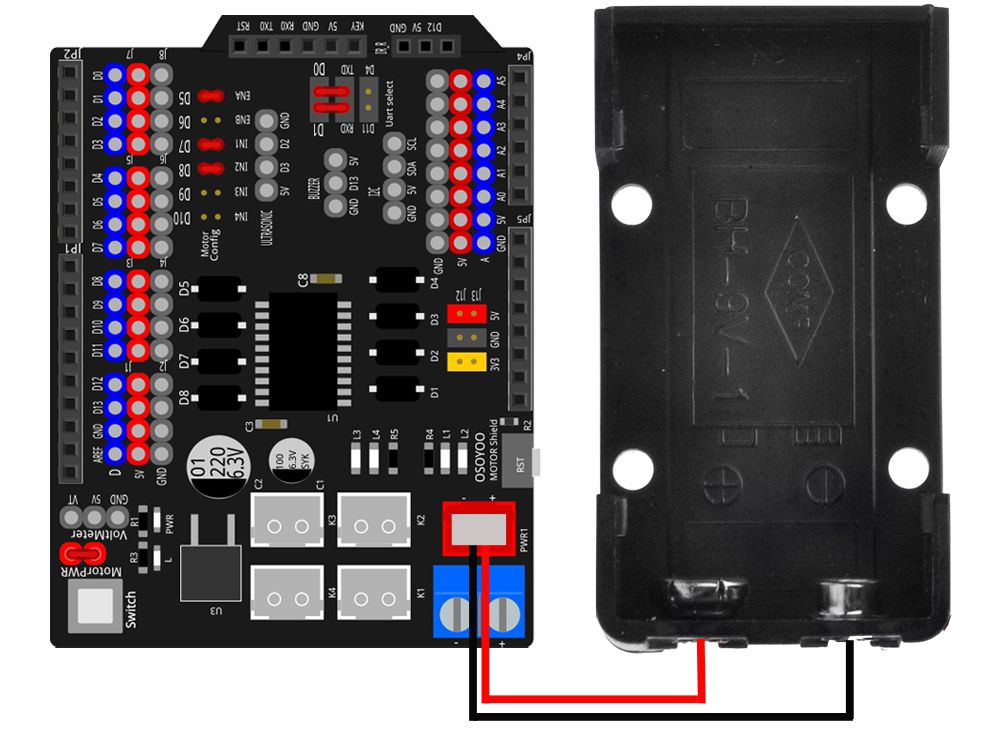
3) Conecte la caja de la batería al escudo OSOYOO Motor V1.1 de la siguiente manera:
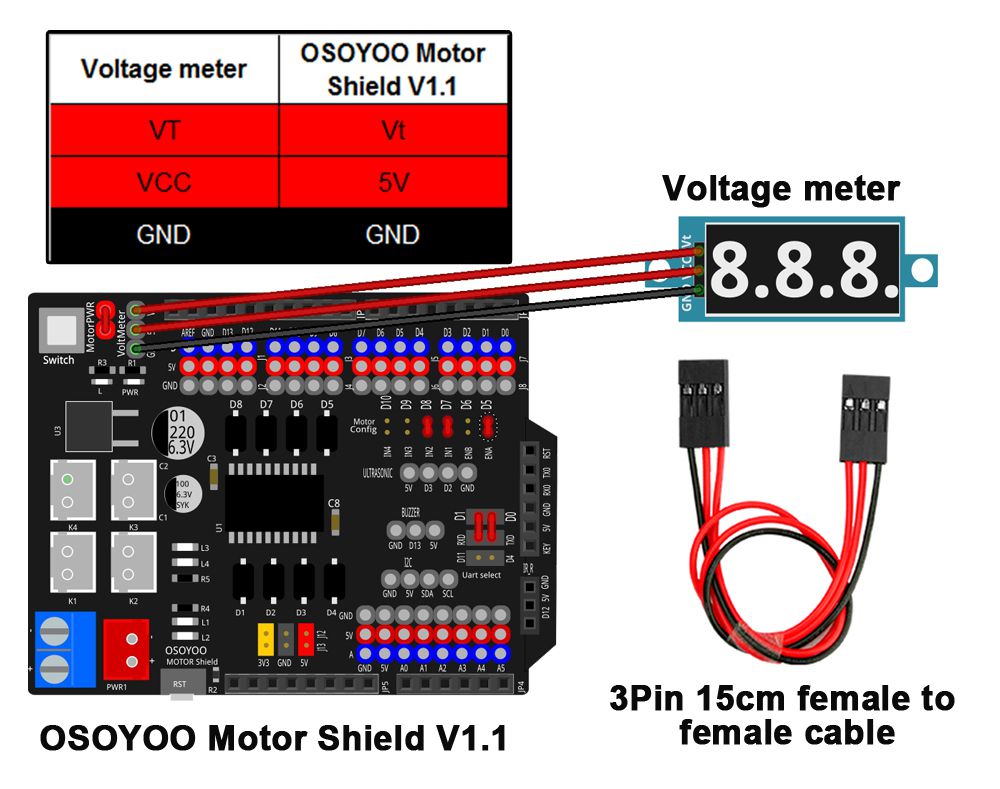
4) Conecte el medidor de voltaje al escudo OSOYOO Motor V1.1 de la siguiente manera:
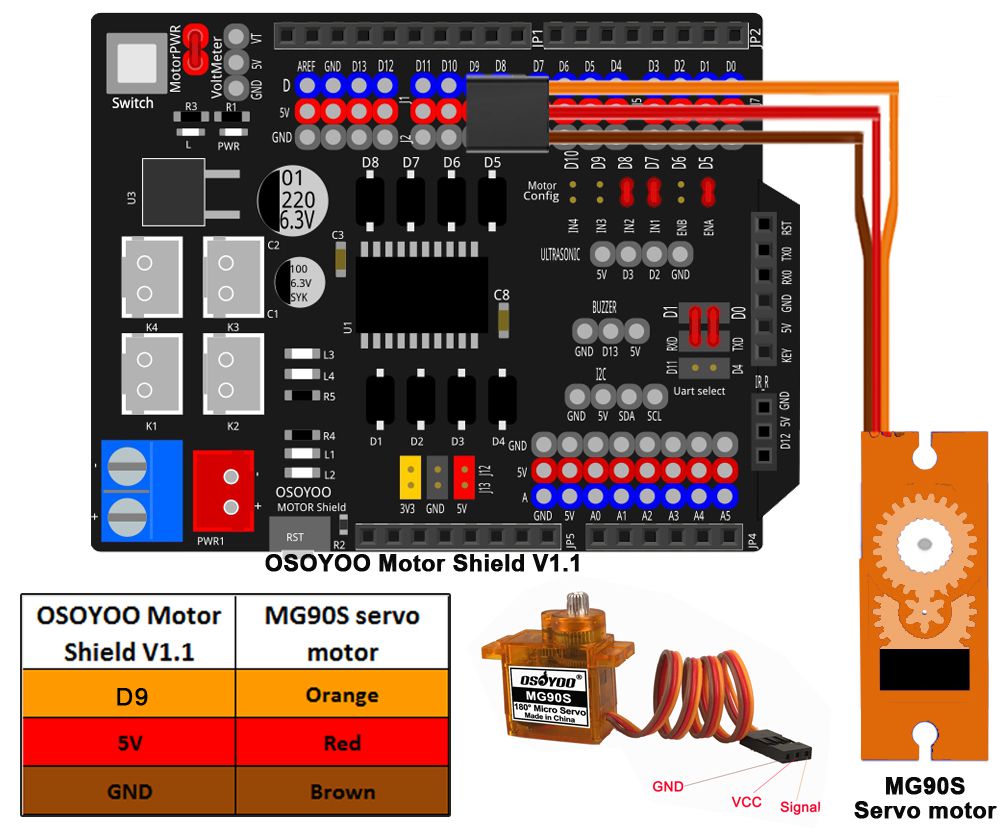
5) Conecte el servomotor MG90S (de color naranja) a D9 del escudo OSOYOO Motor V1.1 de la siguiente manera:
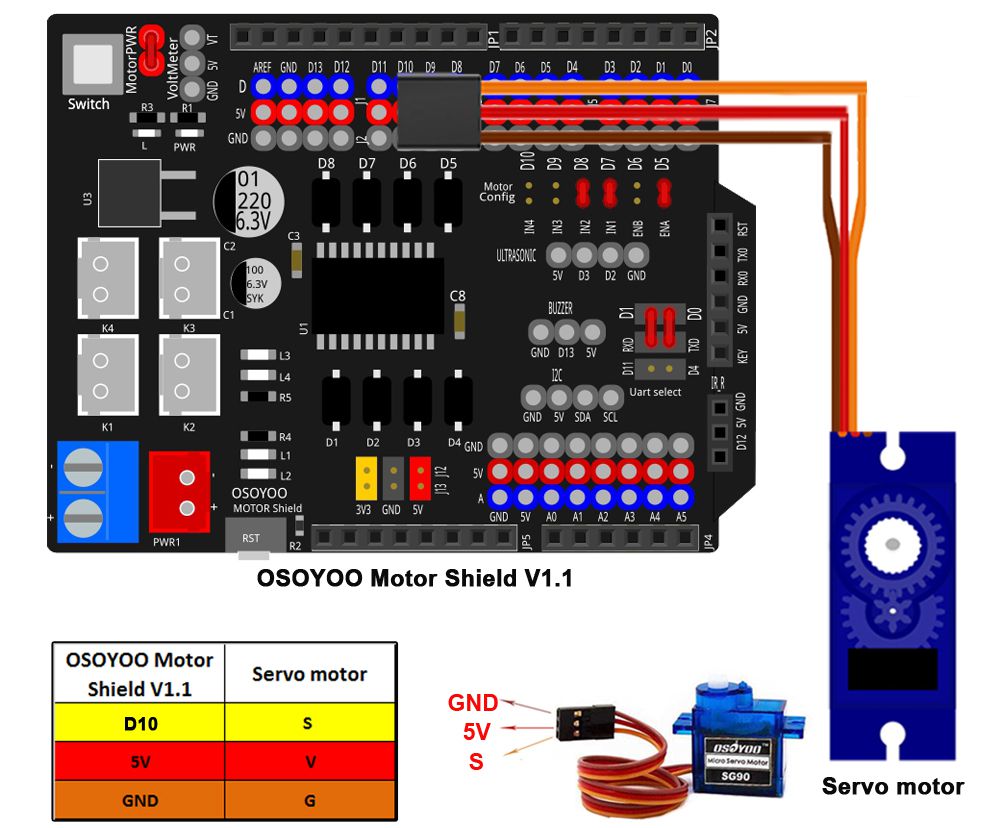
6) Conecte el servo motor (de color azul) a D10 del escudo OSOYOO Motor V1.1 de la siguiente manera:
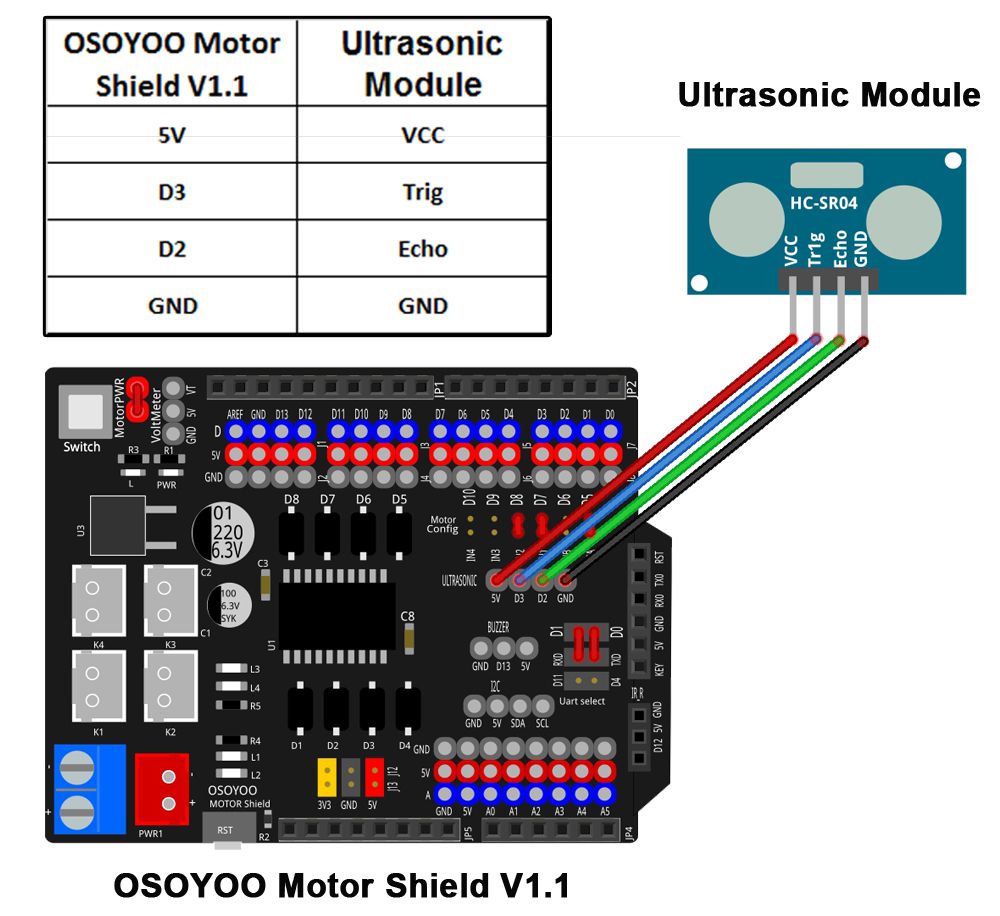
7) Conecte el sensor ultrasónico al escudo OSOYOO Motor V1.1 de la siguiente manera:
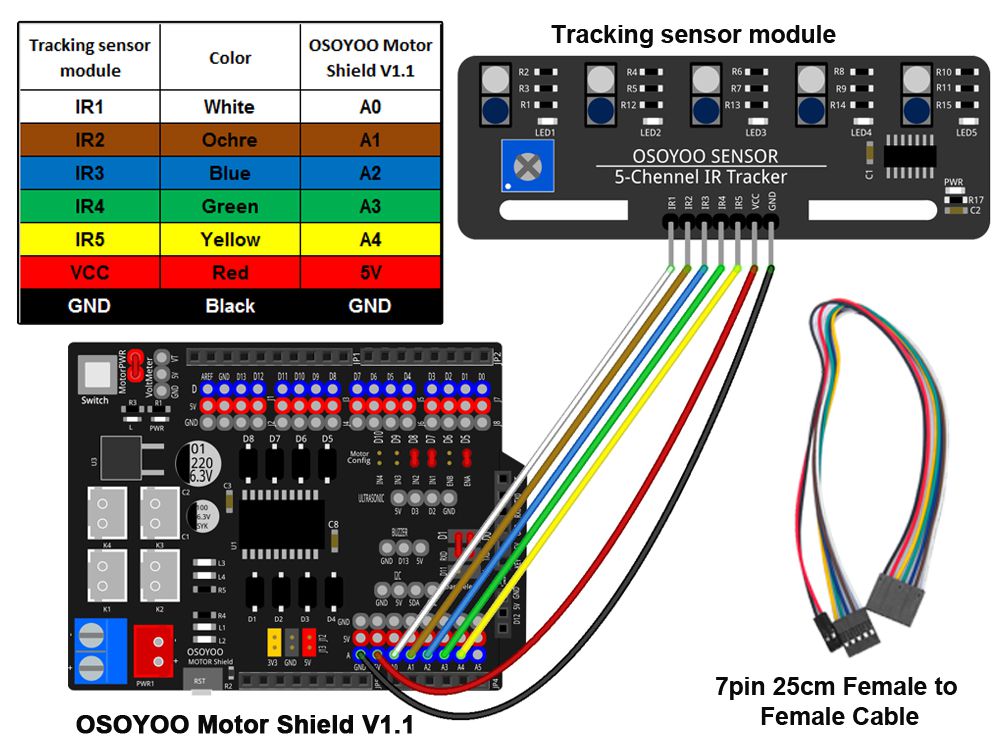
8) Conecte el módulo del sensor de seguimiento al escudo OSOYOO Motor V1.1 de la siguiente manera:
Ahora la instalación del hardware está casi lista. Antes de instalar la batería en la caja, primero debemos cargar el código de muestra en la placa Arduino.
Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.8.19, omita este paso). Descargue el IDE Arduino desde https://www.arduino.cc/en/software , luego instale el software.
Instale una utilidad zip para descomprimir el archivo de código, como 7-zip
Alineación del servo de dirección
Antes de ejecutar el código de muestra, primero pruebe la dirección del servo de dirección.
Ahora puede descargar e instalar el archivo de prueba del servo de la Lección 1 ( steering.ino )
Paso 2. Descomprima este archivo, verá una carpeta llamada servo, ingrese a esa carpeta, encontrará un archivo de steering.ino
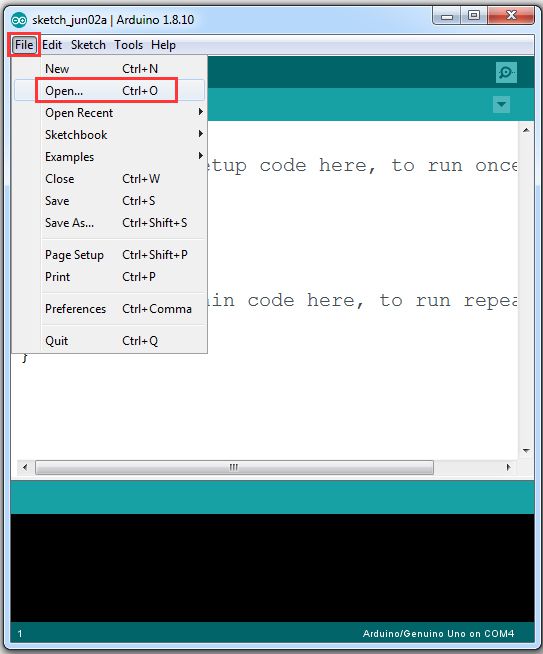
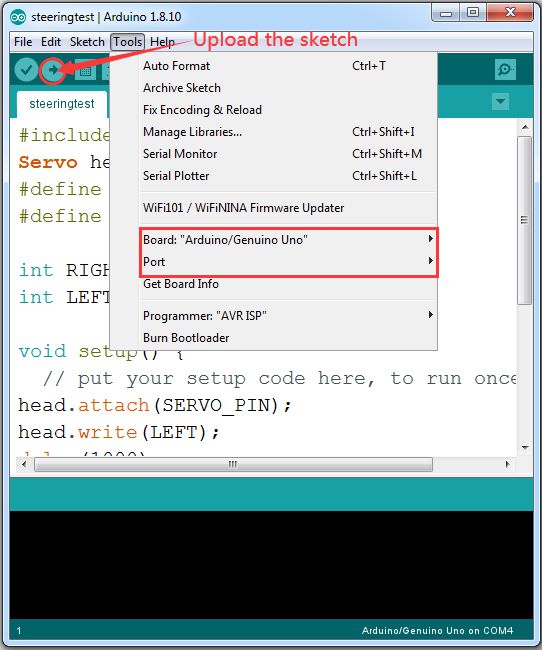
Paso 3 Conecte la placa básica OSOYOO UNO R3 a la PC con un cable USB, abra el IDE Arduino -> haga clic en Archivo -> haga clic en Abrir -> elija el código ” roadtest.ino ” en la carpeta de prueba de dirección , cargue el código en la placa básica OSOYOO para Arduino.
Aviso: apague la batería o desconecte el adaptador de corriente cuando cargue el código en la placa básica OSOYOO para Arduino.
Paso 4. Elija la placa/puerto correspondiente para su proyecto, luego cargue el código en la placa.
Paso 5. Si su servo de dirección no mira hacia el centro de la dirección frontal, entonces tiene dos opciones: Opción 1 ) Use un destornillador para liberar el brazo de dirección del servo, vuelva a alinear la dirección de la rueda manualmente y luego fije el brazo del servo de nuevo.
Opción 2) Puede cambiar el valor predeterminado de la línea 4
#define FRONT 90
si la dirección tiende ir a la izquierda, aumente el valor de 90 a 95, 100, 105 …
si la dirección tiende ir a la derecha, disminuya el valor de 90 a 85, 80, 75 …
Ejecute el código nuevamente hasta que la dirección de las ruedas finalmente miren hacia el frente.
Luego escriba el valor FRONT, usaremos este valor para cambiar el código de la Lección 2, 3, 4, 5 y 6, luego hacer que el servo de la dirección siempre mire hacia adelante con el valor FRONT predeterminado.
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.


































Bonjour,
Je suis bloqué sur la leçon 2. La leçon 1 fonctionne très bien. Le programme est bien téléchargé de la leçon 2 mais la voiture sur le sol n’avance pas alors que lorsque je la tiens dans la main, les roues tournent normalement et rapidement.
J’ai l’impression que le moteur manque de puissance. Pourriez-vous m’aider ?
Cordialement,
Noah
1)please double check if the battery is enough. If battery lower than 8V, please recharge the battery or buy a new 9V battery
2)please make sure very parts is not suck, especially in front steering structure.