Mecanum Wheel Robot Car Paquete completo (con baterías 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
Mecanum Wheel Robot Car Kit Chasis Metálico
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
El codificador se usa normalmente para el algoritmo PID. En este momento, nuestro automóvil Mecanum no necesita la función PID, por lo que no escribimos un programa codificador para este automóvil.
Muchos usuarios han comprado el motor de engranajes OSOYOO DC para el robot Tank, el robot de ruedas Mecanum y el carro Balance que tiene un codificador incorporado. Algunos de ellos están interesados en cómo programar codificadores. Proporcionamos un programa simple que guía al usuario a usar la placa básica OSOYOO para Arduino para leer cuántos codificadores de pulsos envían a Arduino en cada rotación..
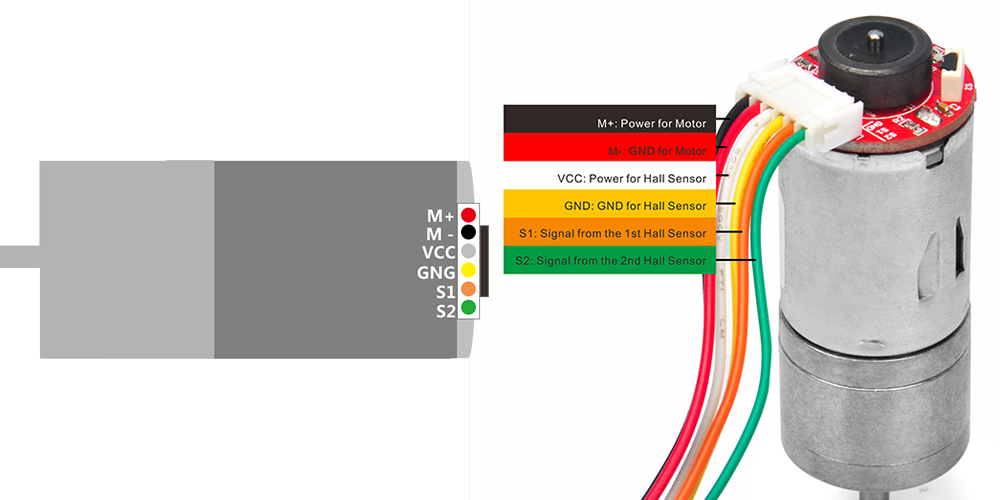
Ahora la última versión de los motores viene sin tapas de protección como la imagen adjunta. La tapa de protección del motor se despega con facilidad, por lo que retiramos esta tapa.
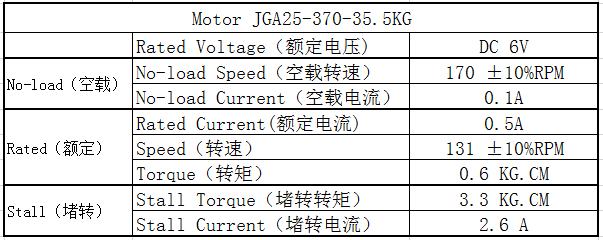
Ficha de datos:JGA25-370-35.5KG
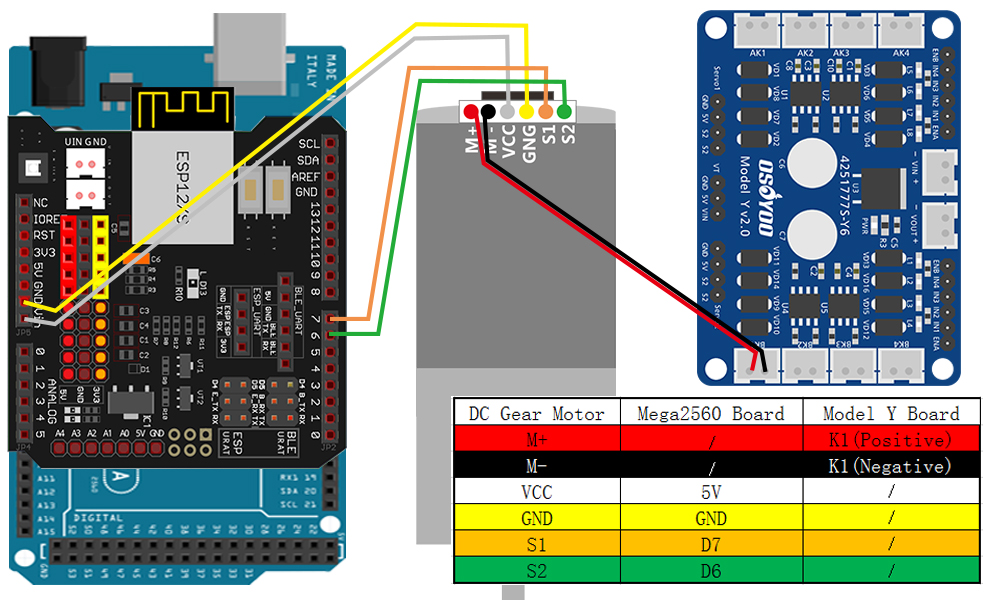
Conexión:
Motor paso a paso
OSOYOO Placa básica para Arduino
Linea blanca(V- Power)
VCC
Línea amarilla(G-GND)
GND
Naranja (S1)
D7
Verde (S2)
D6
Es posible que algún módulo haya invertido la línea V Power/G-GND. Si el siguiente código no funciona, cambie la línea amarilla a 5 V y la línea blanca a Arduino GND.
Una vez que cargue el código en Arduino IDE, abra el monitor serial en la esquina superior derecha.
Ahora instale una rueda en el motorreductor de CC y haga que se pueda girar a mano. Luego gire la rueda 360 grados y deténgase. Verá que se mostrará la pantalla del monitor serie:
La última línea muestra la Posición 151. Esto significa que cuando gira el motor 360 grados, el sensor de pasillo ha generado 151 pulsos. Entonces el motor tiene alrededor de 150 pulsos por rotación..
Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay












Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay
hi, Clay,
You can buy the IR obstacle sensor in https://osoyoo.store/products/ir-obstacle-avoidance-module-for-arduino-v2-0-robot-carmodel-2016000400?variant=31648429015151