Mecanum Wheel Robot Car Pacchetto completo (con batterie 18650)
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
Mecanum Wheel Robot Car Kit Telaio in metallo
Buy from US
Buy from UK
Buy from DE
Buy from IT
Buy from FR
Buy from ES
ここでご購入を!
L’encoder viene normalmente utilizzato per l’algoritmo PID. In questo momento, la nostra macchina Mecanum non ha bisogno della funzione PID, quindi non scriviamo un programma di codifica per questa macchina.
Molti utenti hanno acquistato il motoriduttore OSOYOO DC per robot Tank, robot ruota Mecanum e Balance car con encoder integrato. Alcuni di loro sono interessati a come programmare l’encoder. Forniamo un semplice programma che guida l’utente a utilizzare OSOYOO Basic Board per Arduino per leggere quanti impulsi gli encoder inviano ad Arduino ad ogni rotazione.
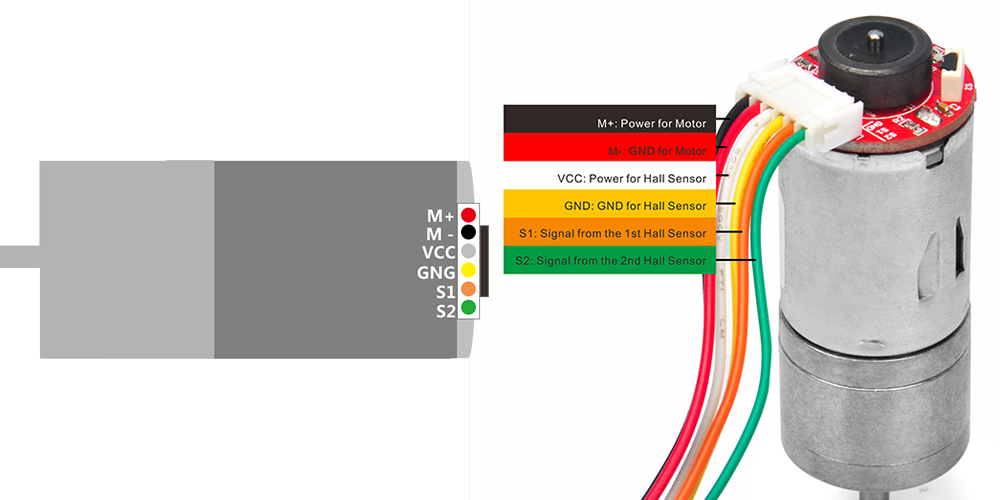
Ora l’ultima versione dei motori viene fornita senza cappucci di protezione come l’immagine allegata. Il cappuccio di protezione del motore si stacca facilmente, quindi rimuoviamo questo cappuccio.
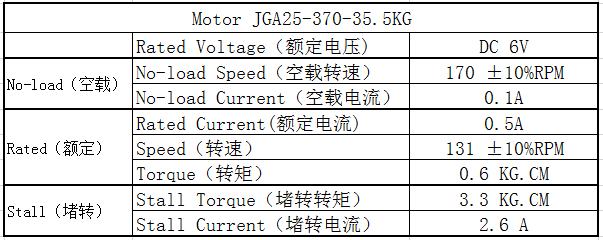
Scheda dati:JGA25-370-35.5KG
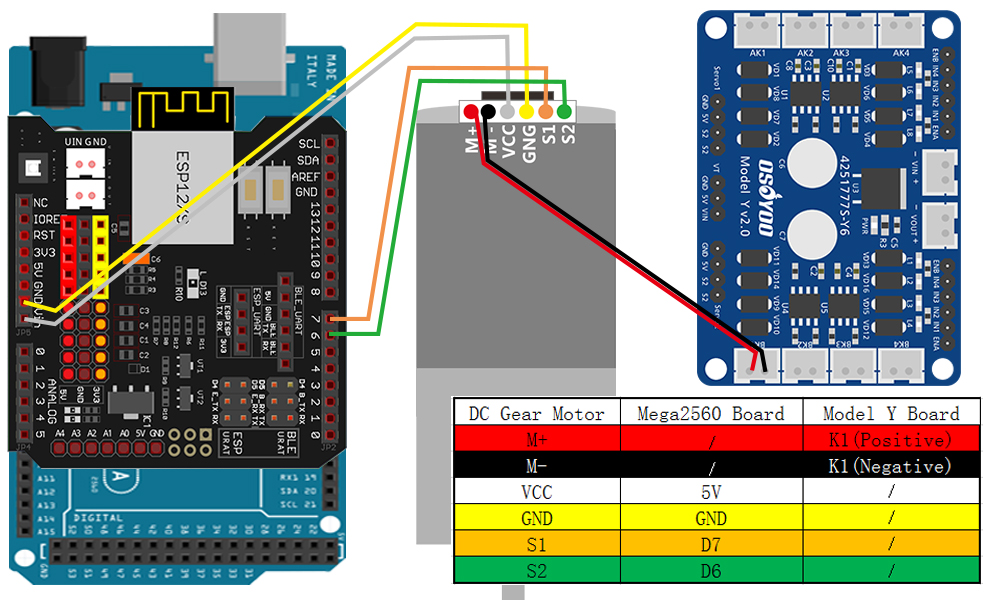
Connessione:
Motore passo-passo
Scheda di base OSOYOO per Arduino
linea bianca(V- Power)
VCC
Linea gialla (G-GND)
GND
Arancia (S1)
D7
Verde (S2)
D6
Alcuni moduli potrebbero avere la linea V Power/G-GND invertita. Se il seguente codice non funziona, passare la linea gialla a 5V e la linea bianca a Arduino GND.
Una volta caricato il codice nell’IDE di Arduino, apri il monitor seriale nell’angolo in alto a destra.
Ora installa una ruota sul motoriduttore DC e fallo girare a mano. Quindi ruotare la ruota di 360 gradi e fermarsi. Vedrai che lo schermo del monitor seriale mostrerà:
L’ultima riga mostra la posizione 151. Ciò significa che quando si ruota il motore a 360 gradi, il sensore Hall ha generato 151 impulsi. Quindi il motore ha circa 150 impulsi per rotazione.
Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay












Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay
hi, Clay,
You can buy the IR obstacle sensor in https://osoyoo.store/products/ir-obstacle-avoidance-module-for-arduino-v2-0-robot-carmodel-2016000400?variant=31648429015151