



Mecanum Wheel Robot Car Full Package (with 18650 batteries)
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
 |
 |
 |
 |
 |
 |
 |
Mecanum Wheel Robot Car Kit Metal Chassis
| Buy from US |
Buy from UK |
Buy from DE |
Buy from IT |
Buy from FR |
Buy from ES |
ここでご購入を! |
|
|
|
|
|
|
|

OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2xleft-wheels/2xright-wheels and Motor x 4)
OSOYOO Mega2560 board, fully compatible with Arduino x 1
OSOYOO Wi-Fi shield x 1
OSOYOO Model Y motor driver x 1
OSOYOO IR Obstacle Sensor x 2
OSOYOO Battery box x 1
OSOYOO 3pin female to female jumper wire x1
OSOYOO 6pin male to female jumper wire x2
OSOYOO 2 pin XH.25 female to female x1
OSOYOO 10 pin jumper wire male to female x1
18650 Batteries(3.7V) x 2

In this lesson, we will install 2pcs IR distance sensors on a robot car and program the car to follow object movements. The car receives the signal from the IR distance sensors, and then the program will drive the car to take actions.

You must complete lesson 1 (assembling the car) before you continue on with this lesson.
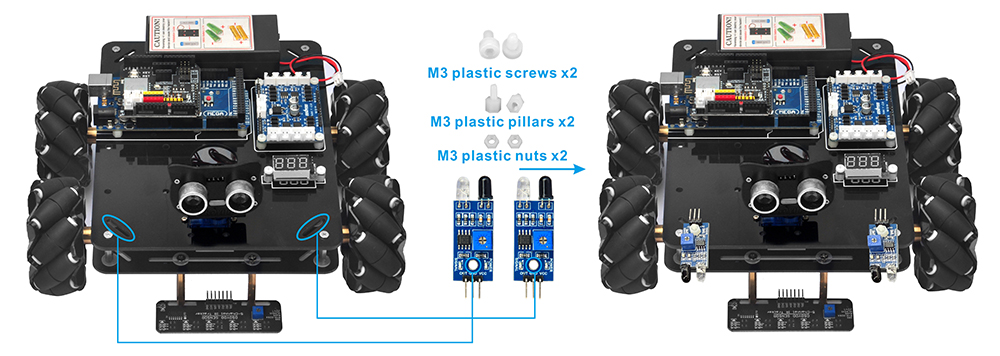
Install 2pcs IR distance sensors modules as below . (Remember : DO NOT remove any existing wires installed in Lesson 1)

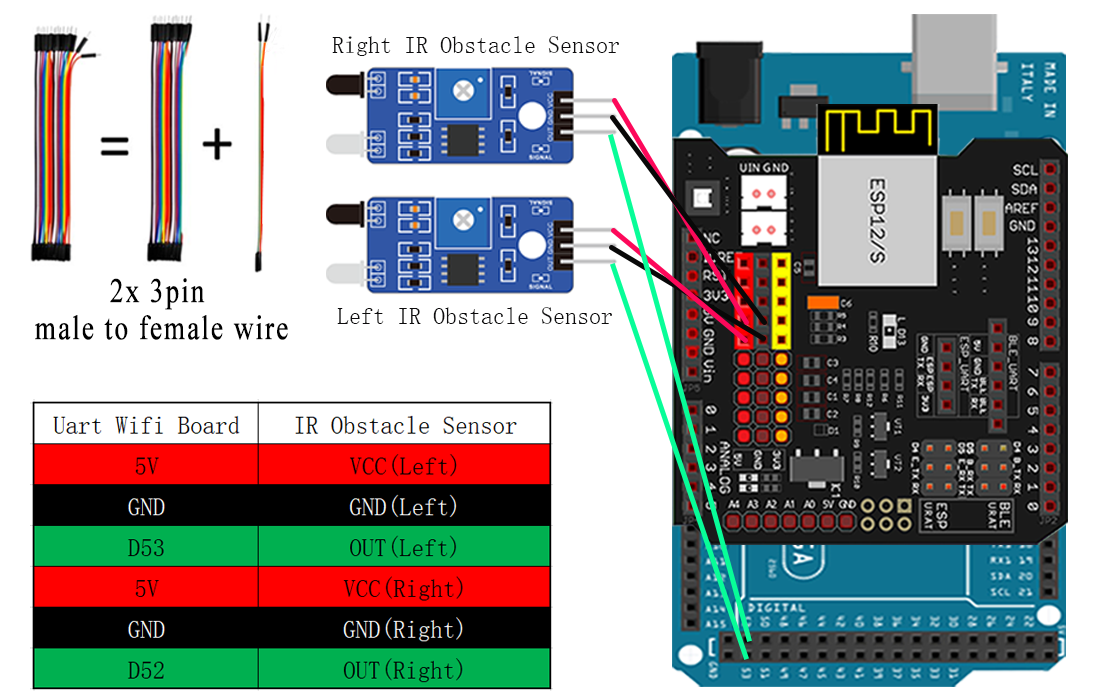
Connect 2pcs IR distance sensors modules as below connection diagram. (Remember : DO NOT remove any existing wires installed in Lesson 1)

Step 1: Install latest Arduino IDE (If you have Arduino IDE version after 1.1.16, please skip this step). Download Arduino IDE from https://www.arduino.cc/en/Main/Software?setlang=en, then install the software.
Step 2: Download https://osoyoo.com/driver/mecanum_metal_chassis_m2/m2-lesson6.zip, nzip the download zip file mc-lesson4.zip, you will see a folder called m2-lesson6.zip.
Step 3: Connect Mega2560 board to PC with USB cable, Open Arduino IDE → click file → click Open → choose code “mc-lesson6.ino” in lesson6 folder, load the code into Arduino.

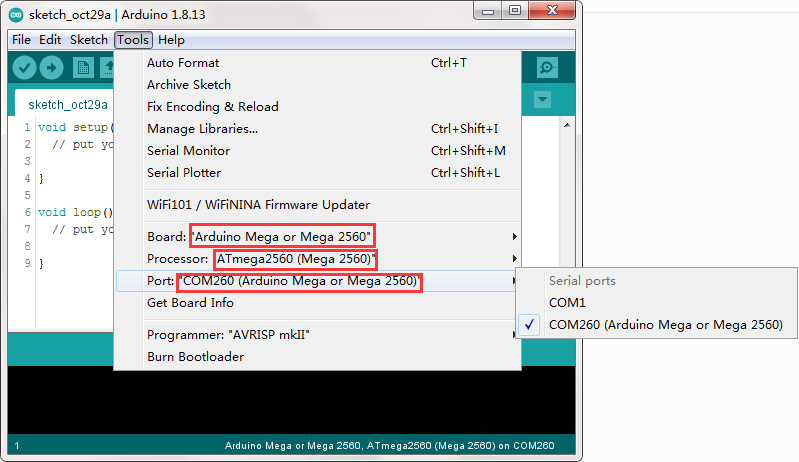
Step 4: Choose corresponding board/port for your project, upload the sketch to the board.
Step 5: Turn on the car, put object about 10 cm ahead of each IR distance sensors and adjust potentiometer on IR distance sensors to detect object or your hand.
Note: When these IR modules detect objects, both the power indicator and signal indicator are on. When No object is detected, only power indicator is on, signal indicator is off. If the signal indicator is always on even though there is no obstacle in front of the sensor, you need to adjust the potentiometer.

Turn on the car, place your hand ahead of the car, then the car will move towards your hand as if you pull it. It goes forward when both IR Obstacle Avoidance modules detect your hand; it turns right if only the right IR Obstacle Avoidance module detects object; it turns left if only the left IR distance sensor detects object.
When your hand is over 10 cm ahead, it will stop.











Do you have the sensors required for this lesson available for purchase?
I realize they are extra and do not come with the kit that I purchased.
Thank you,
Clay
hi, Clay,
You can buy the IR obstacle sensor in https://osoyoo.store/products/ir-obstacle-avoidance-module-for-arduino-v2-0-robot-carmodel-2016000400?variant=31648429015151