Las ruedas omnidireccionales Mecanum son una tecnología poderosa que permite que un automóvil robot se mueva en cualquier dirección, incluido el movimiento lateral hacia la izquierda y hacia la derecha.
En este proyecto, demostraremos cómo usar Arduino para controlar un automóvil robot de la marca Osoyoo equipado con ruedas omnidireccionales Mecanum.
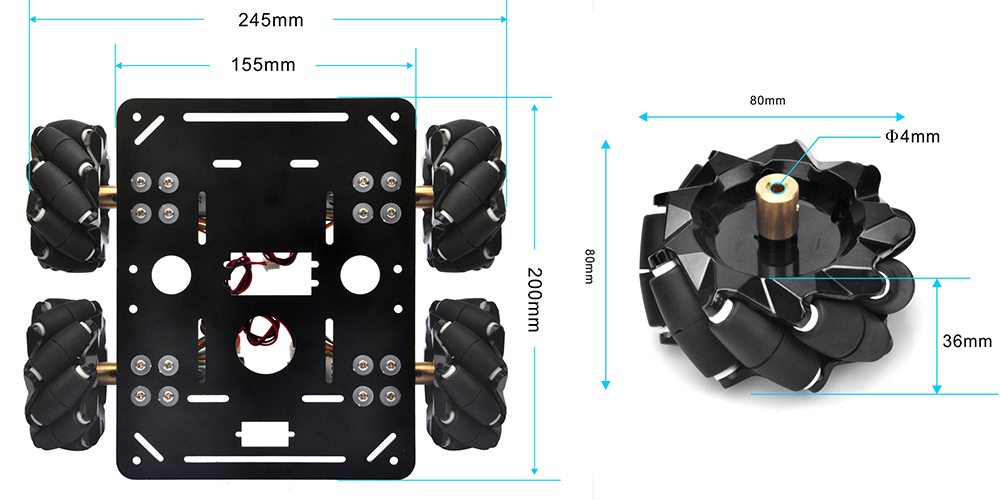
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2 ruedas izquierdas/2 ruedas derechas y 4 motores)
Placa OSOYOO Mega2560, totalmente compatible con Arduino
Escudo Wi-Fi OSOYOO V1.3 x 1
Controlador de motor OSOYOO Modelo Y x 1
Medidor de voltaje OSOYOO x1
Caja de batería OSOYOO x 1
OSOYOO Cable de puente hembra a hembra de 3 pines x1
OSOYOO Cable de puente macho a hembra de 6 pines x2
OSOYOO 2 pin XH.25 hembra a hembra x1
18650 baterías (3,7 V) x 2
Specifications:
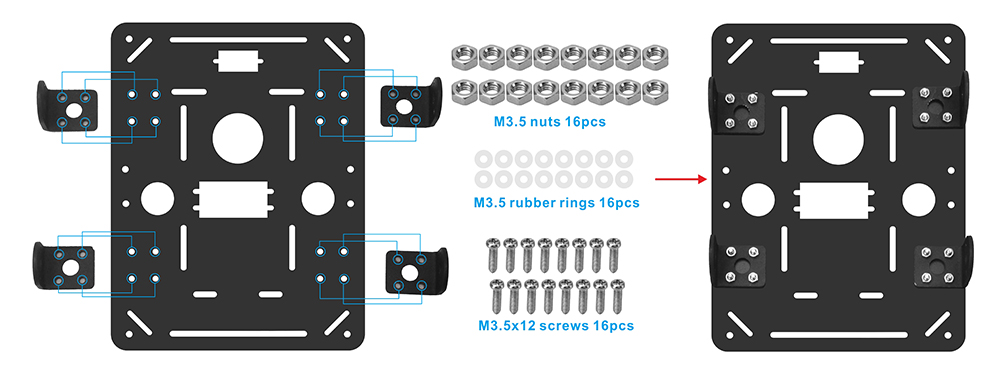
Paso 1. Instale el soporte de metal en el chasis de metal con 16 tornillos M3.5*12, anillos de goma M3.5 y tuercas M3.5 como se muestra en las siguientes imágenes.
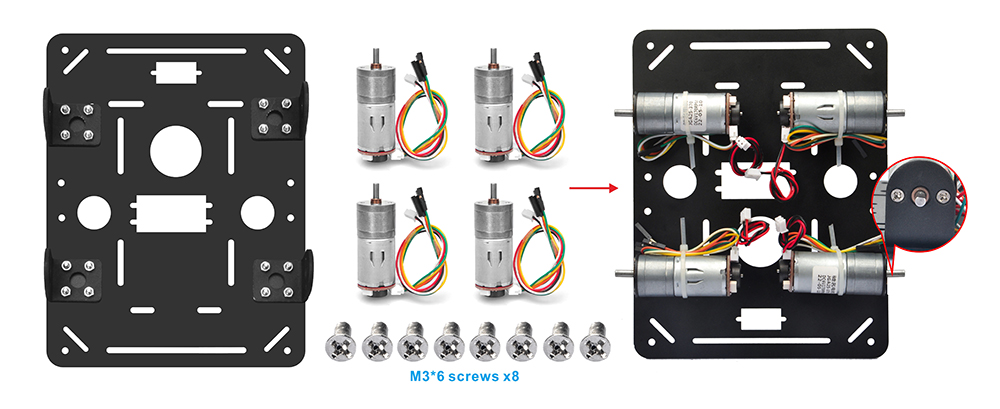
Paso 2. Instalación de 8 tornillos M3*6 según el siguiente cuadro rojo.
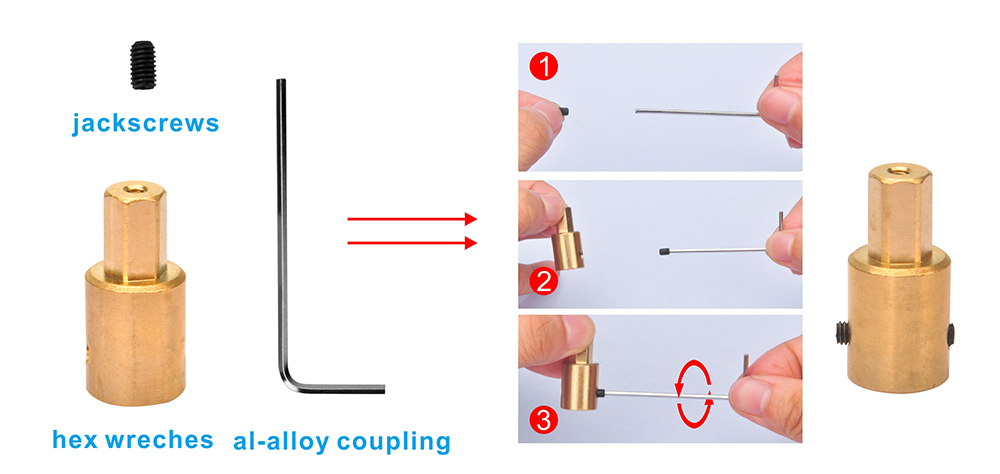
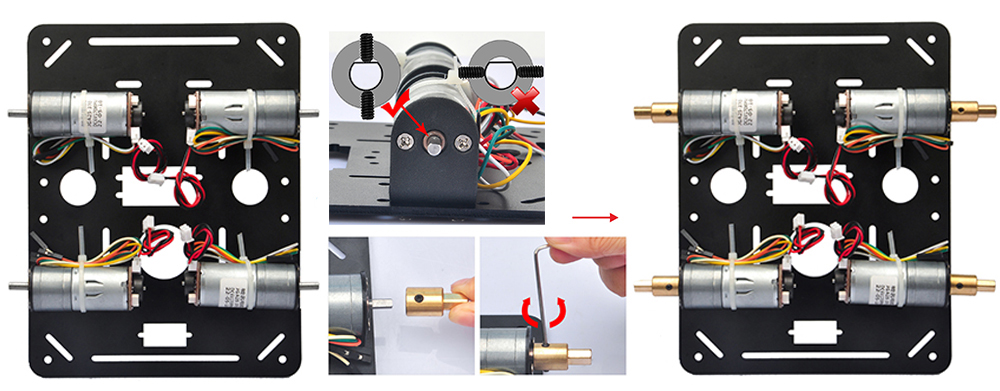
Paso 3. Instale los tornillos niveladores en el acoplamiento de aleación de aluminio, apriete los tornillos niveladores para fijar el acoplamiento de aleación de aluminio en el motor como se muestra en las siguientes imágenes..
El eje del motor tiene un área plana. Asegúrese de que el tornillo nivelador esté colocado en esta parte plana y apriete ambos tornillos en el eje como se muestra en las siguientes imágenes..
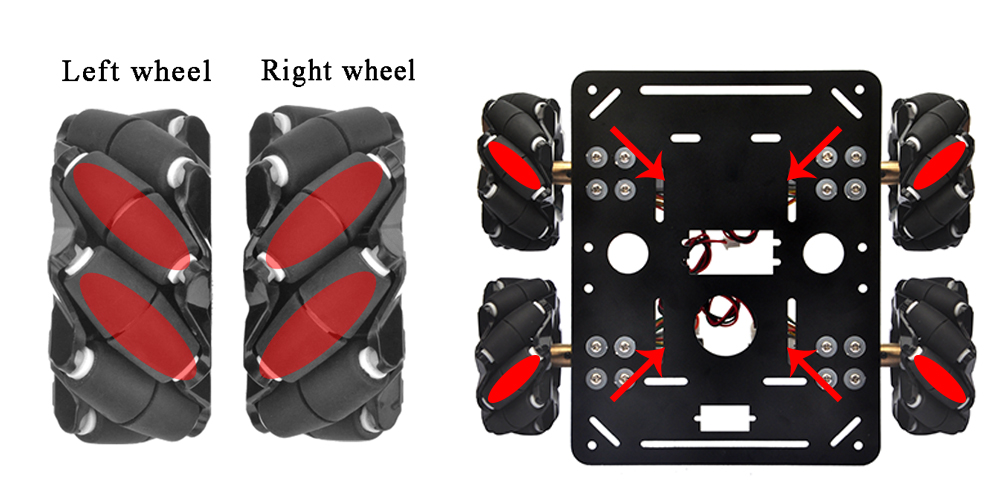
Etapa 4. Instale las 4 ruedas Mecanum en el acoplamiento de aleación de aluminio con 4 piezas M2.5 * 10 como se muestra en las siguientes imágenes.
Hay dos tipos de ruedas Mecanum, rueda Mecanum izquierda y derecha; la diferencia entre ellos es la orientación de los rodillos. Para una rueda Mecanum, como se muestra a continuación, los rodillos están orientados de abajo a la derecha a arriba a la izquierda. Los rodillos para las ruedas B se instalan de manera opuesta.
Una configuración correcta requiere que cada una de las cuatro ruedas se ajuste de la manera que se muestra a continuación, donde el eje de rotación del rodillo superior de cada rueda apunte hacia el centro de la plataforma. Tenga en cuenta que todo el análisis dinámico y los códigos escritos previamente se basan en esta configuración.
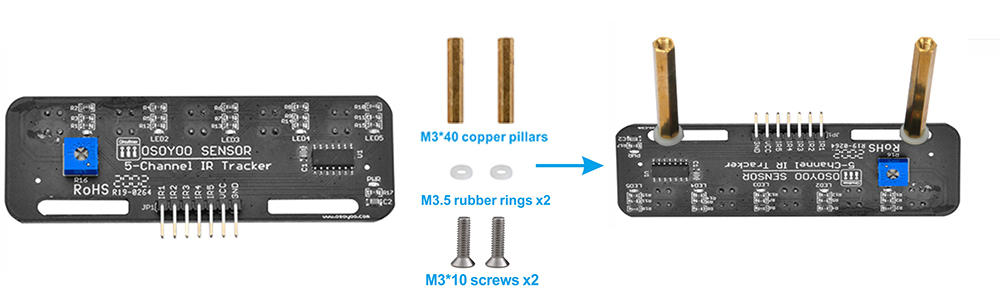
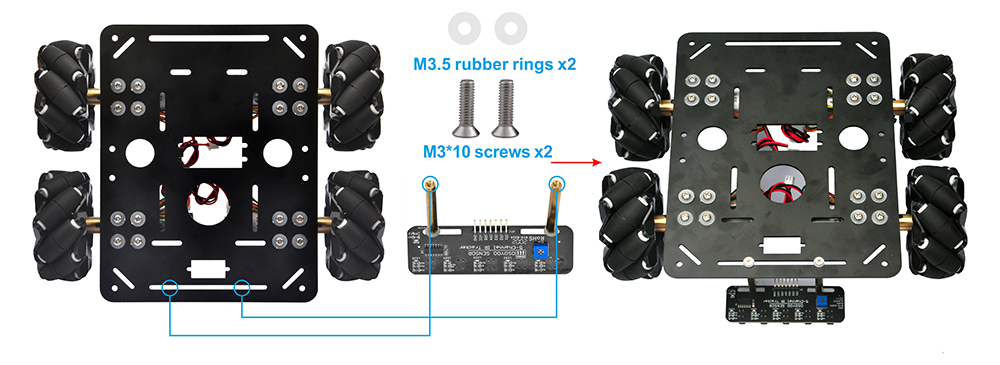
Paso 5. Instale 2 pilares de cobre M3x40 con 2 tornillos M3 y 2 anillos de goma M3.5 en el sensor de seguimiento como se muestra en las siguientes imágenes.
Paso 6. Agregaremos un módulo de sensor de seguimiento de 5 puntos al chasis del automóvil con tuercas M3 como se muestra en las siguientes imágenes.
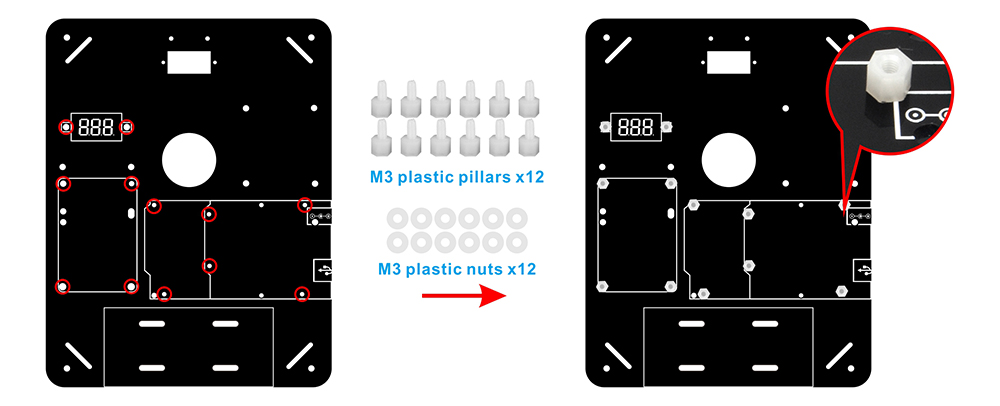
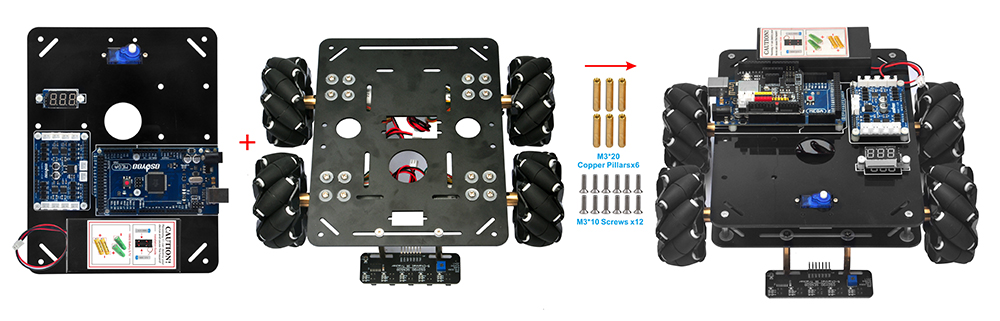
Paso 7. Instale 12 piezas de pilares y tuercas de plástico M3 en el tablero acrílico como se muestra en las siguientes imágenes.
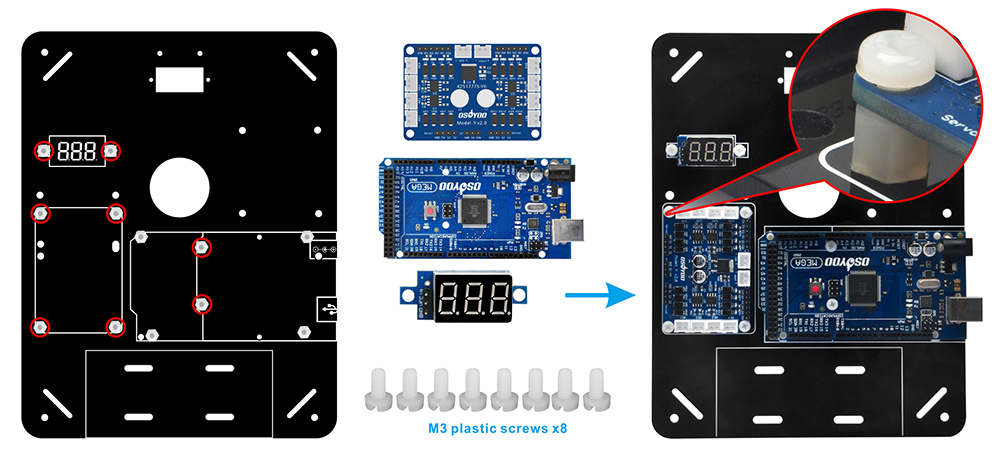
Paso8. Instale 1 placa OSOYOO Mega2560, 1 placa de controlador de motor modelo Y y 1 medidor de voltaje en el chasis acrílico con los 8 tornillos de plástico M3 como se muestra en las siguientes imágenes.
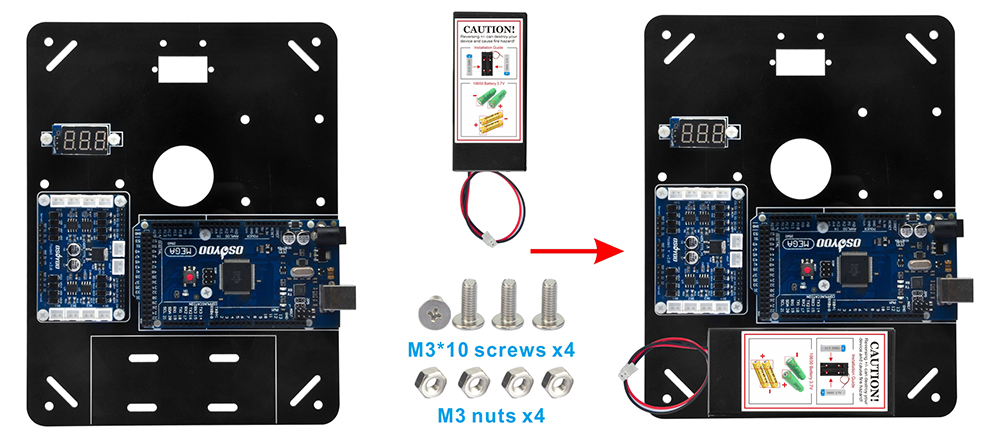
Paso9. Instale la caja de la batería con 4 tornillos y tuercas M3x10 como se muestra en las siguientes imágenes.
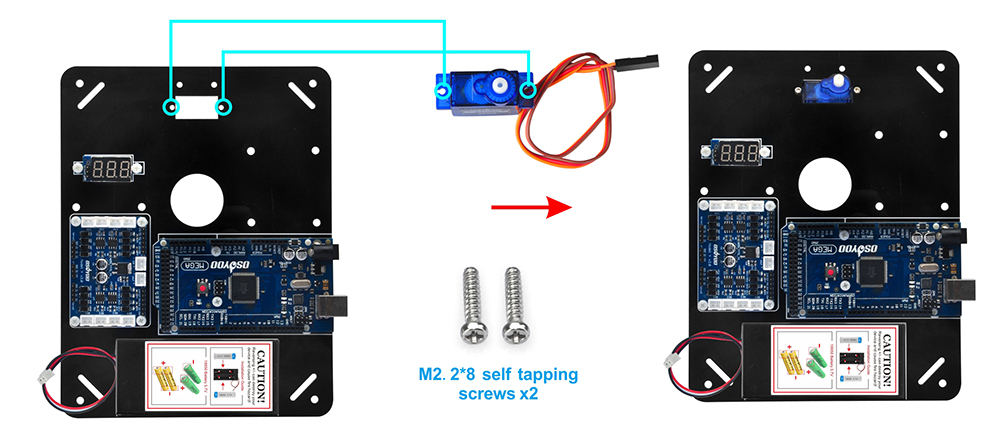
Paso 10. Instale el servo SG90 en el chasis acrílico con 2 tornillos autorroscantes M2.2*8 como se muestra en las siguientes imágenes..
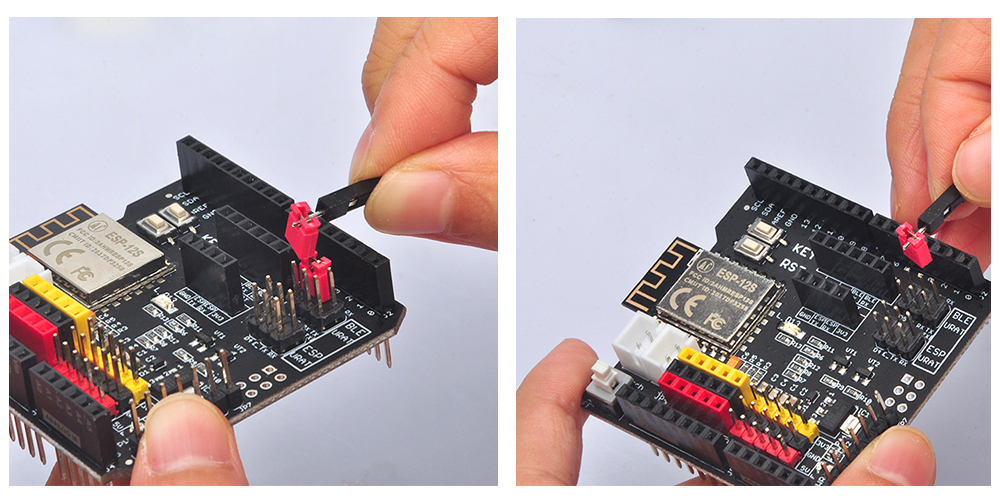
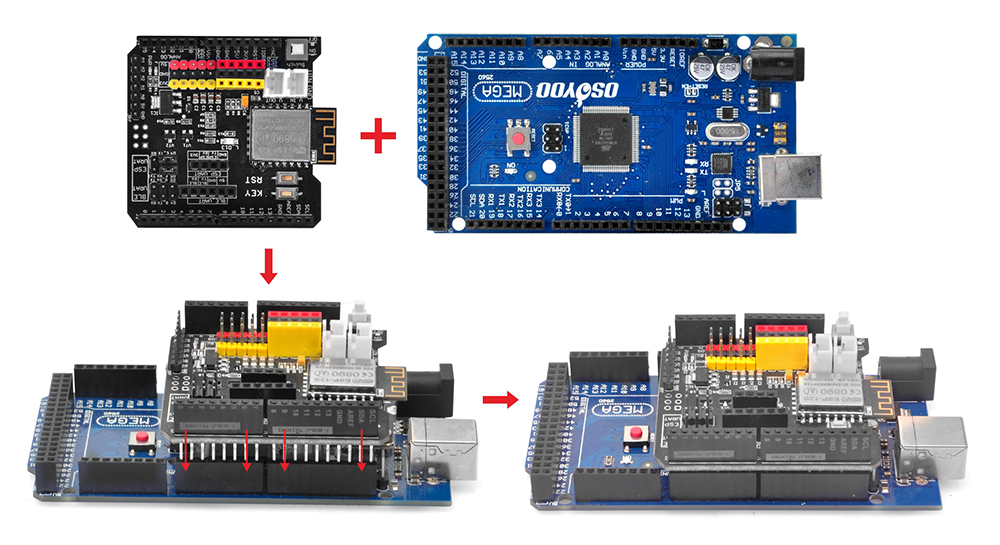
Paso 11. Retire la tapa del puente rojo del escudo Wi-Fi e inserte el escudo OSOYOO Wi-Fi en la placa Arduino Mega2560 como se muestra en las siguientes imágenes.
Paso 12. Instale el chasis de acrílico en el chasis de metal. Tenga en cuenta la parte delantera y trasera del chasis de acrílico y el chasis de metal.
Antes de conectar los cables, asegúrese de haber insertado OSOYOO Wi-Fi Shield en la placa MEGA2560.
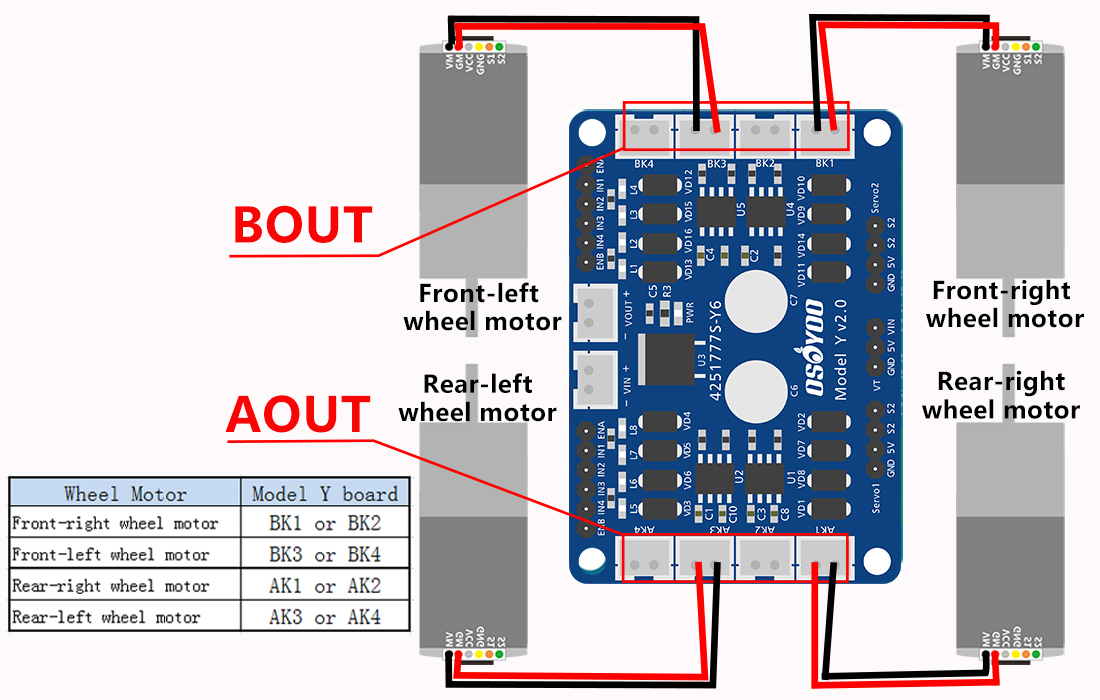
Paso 13. Conecte 4 motores a la placa de controlador del modelo Y según las siguientes imágenes.
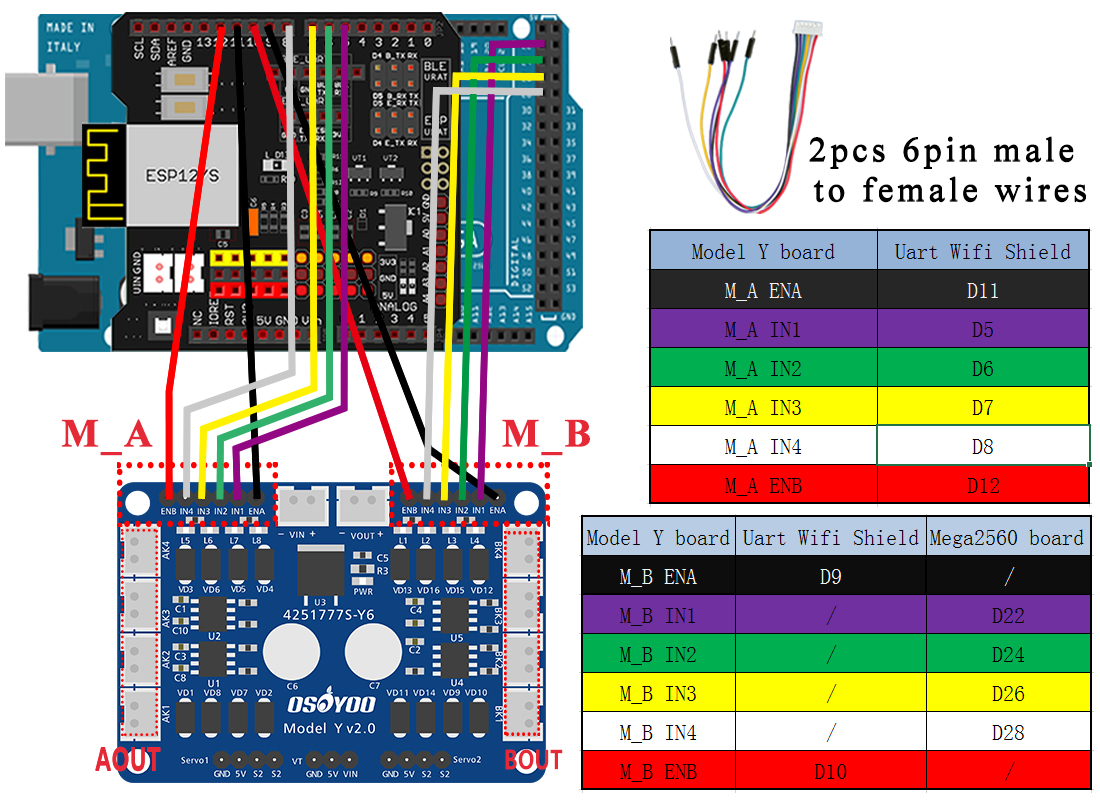
Paso 14.
Placa modelo Y M_A IN1,IN2,IN3,IN4 pin conectar a D5,D6,D7,D8.
Placa modelo Y M_B IN1,IN2,IN3,IN4 pin conectar a D22,D24,D26,D28.
El pin M_A ENA, ENB se conecta a D11, D12.
El pin M_B ENA, ENB se conecta a D9, D10.
Precaución::
Cuando inserte/retire el enchufe del cable paralelo de 6 clavijas en el enchufe macho de 6 clavijas del modelo Y, sujete el soporte de clavijas de plástico blanco para realizar la operación. Nunca arrastre los cables para sacar el enchufe del enchufe, de lo contrario dañará los cables.
Paso 15:
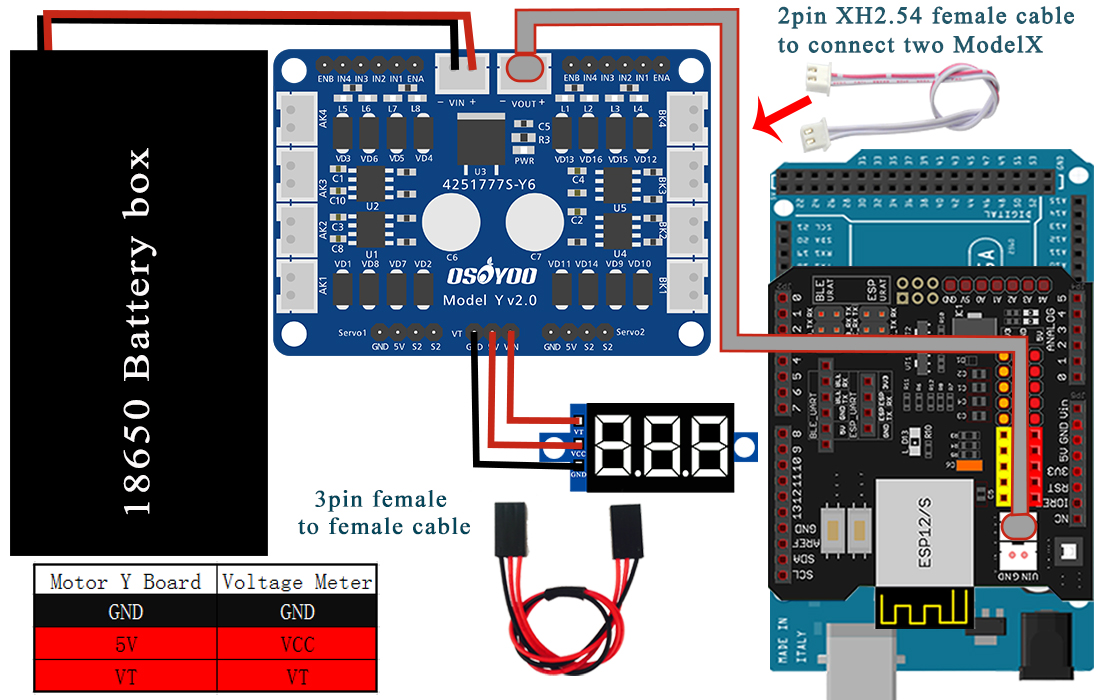
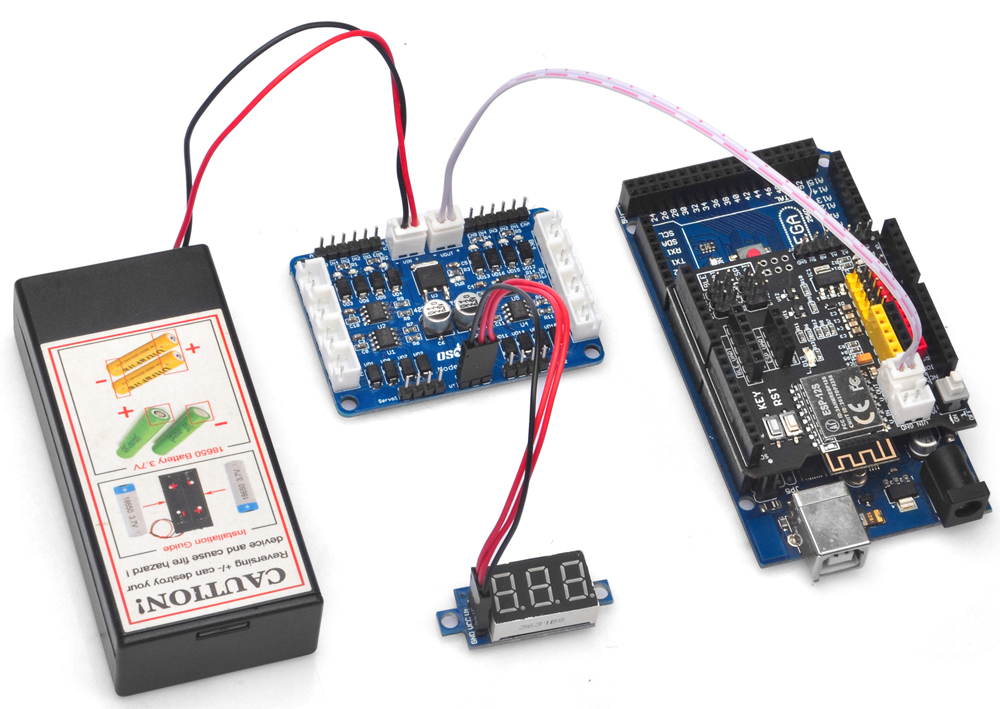
Conecte el medidor de voltaje a la placa del controlador del motor modelo Y con un cable hembra a hembra de 3 pines como se muestra en la siguiente imagen.
Conecte la placa del controlador del motor del modelo Y al escudo Wi-Fi con un cable hembra XH2.54 de 2 pines.
Conecte la caja de la batería 18650 a la placa del controlador del motor modelo Y como se muestra en la siguiente imagen.
Paso 1: Instale el IDE de Arduino más reciente (si tiene una versión de IDE de Arduino posterior a la 1.1.16, omita este paso). Descarga el IDE de Arduino desde https://www.arduino.cc/en/Main/Software?setlang=en, luego instale el programa
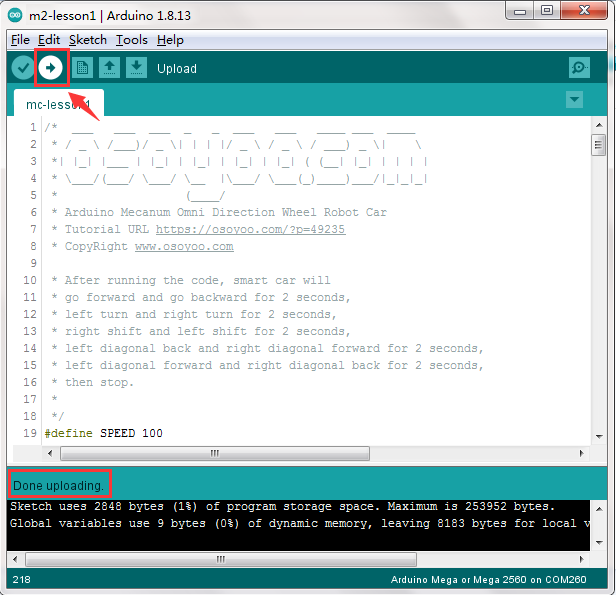
Paso 3: conecte la placa Mega2560 a la PC con un cable USB, abra Arduino IDE → haga clic en archivo → haga clic en Abrir → elija el código “lección 1.ino” en la carpeta lección 1, cargue el código en Arduino.
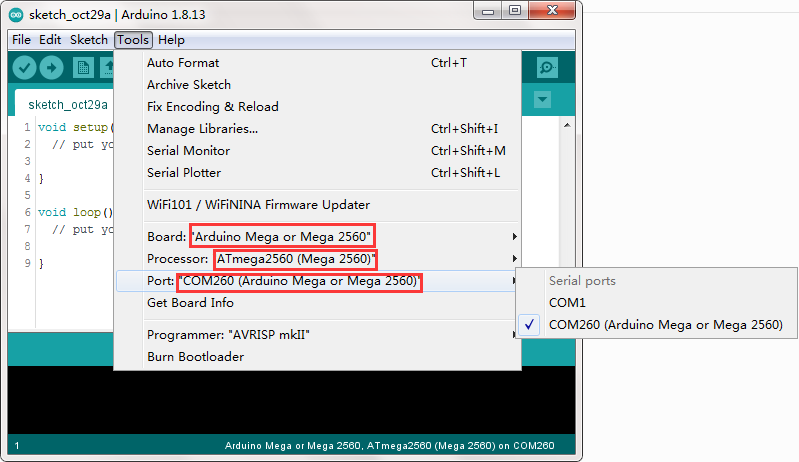
Paso 4: elija la placa/puerto correspondiente para su proyecto, cargue el boceto en la placa.
Desconecte Arduino de la PC, coloque la batería en la caja de la batería. Cuando coloque el automóvil en el suelo, encienda el interruptor OSOYOO Uart Wi-Fi shield y el interruptor en la caja de la batería.
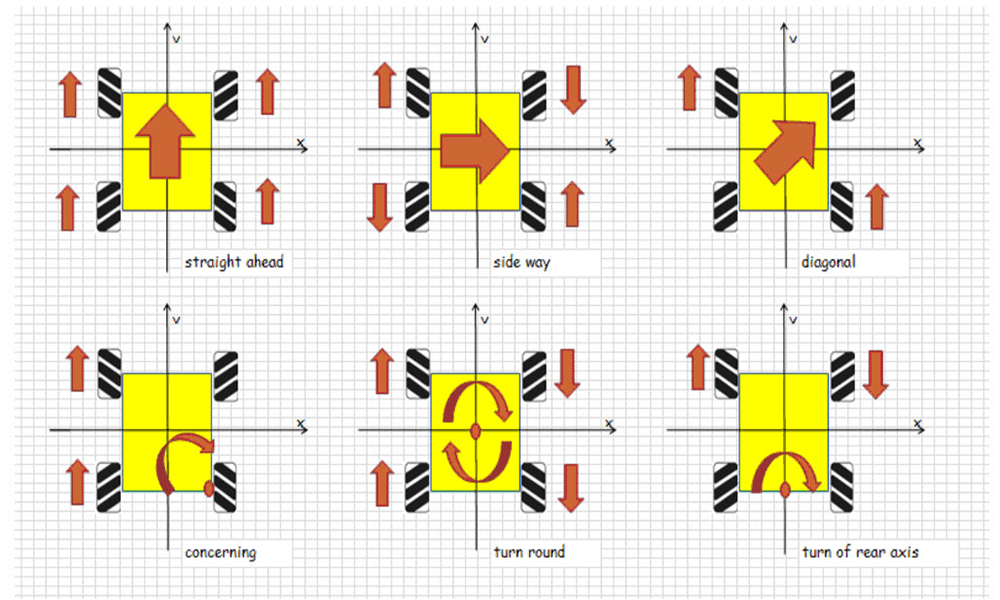
Después de ejecutar el código de la Lección 1, el automóvil se moverá
Adelante→Atrás→Giro a la izquierda→Giro a la derecha→
Desplazamiento paralelo a la derecha→Desplazamiento paralelo a la izquierda→
Diagonal arriba a la derecha→ Diagonal abajo a la izquierda→
Diagonal izquierda arriba → Diagonal derecha abajo
Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.

















Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.