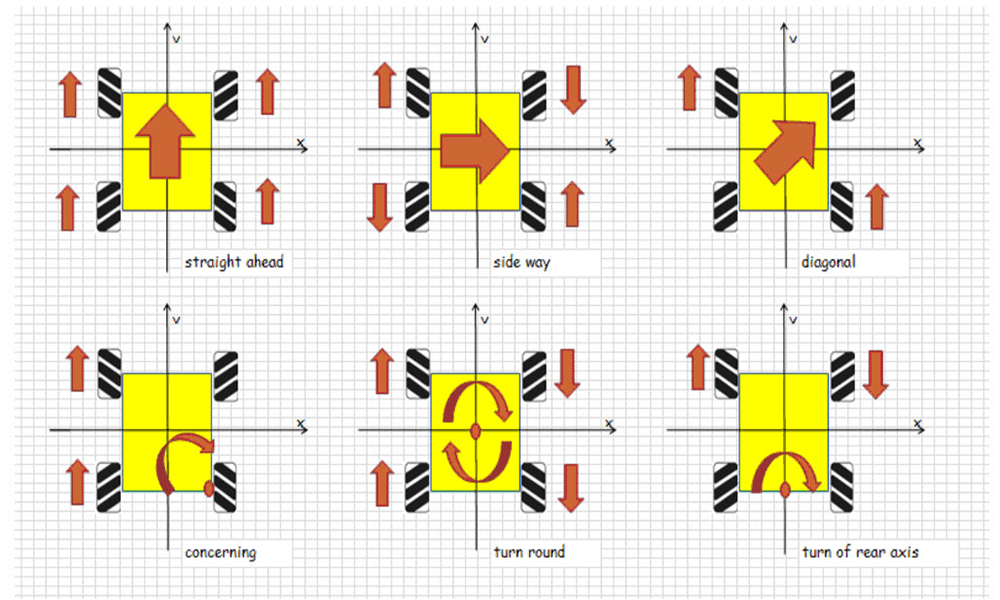
Mecanum-Omniräder sind eine leistungsstarke Technologie, die es einem Roboterauto ermöglicht, sich in jede Richtung zu bewegen, einschließlich seitlicher Bewegungen nach links und rechts.
In diesem Projekt werden wir zeigen, wie man mit Arduino ein Roboterauto der Marke Osoyoo steuert, das mit Mecanum-Omni-Rädern ausgestattet ist.
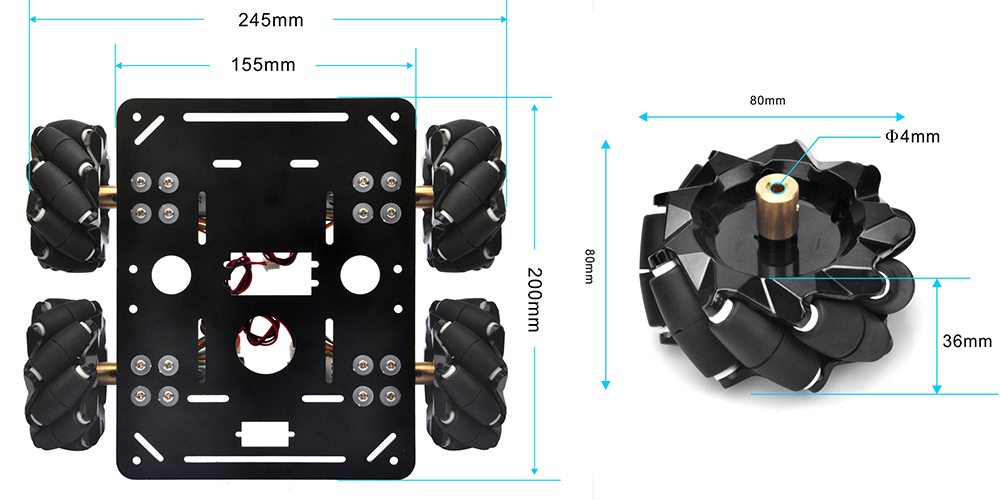
OSOYOO Mecanum Wheels Robotic Car Chassis x 1 (2 x linke Räder/2 x rechte Räder und Motor x 4)
OSOYOO Mega2560 Board voll kompatibel mit Arduino
OSOYOO V1.3 WIFI-Schild x 1
OSOYOO Model Y Motortreiber x 1
OSOYOO Voltmeter x1
OSOYOO Batteriekasten x 1
OSOYOO 3-Pin-Überbrückungskabel von Buchse zu Buchse x1
OSOYOO 6-Pin-Überbrückungskabel von Stecker zu Buchse x2
OSOYOO 2-polige XH.25-Buchse auf Buchse x1
18650 Batterien (3,7 V) x 2
Spezifikationen:
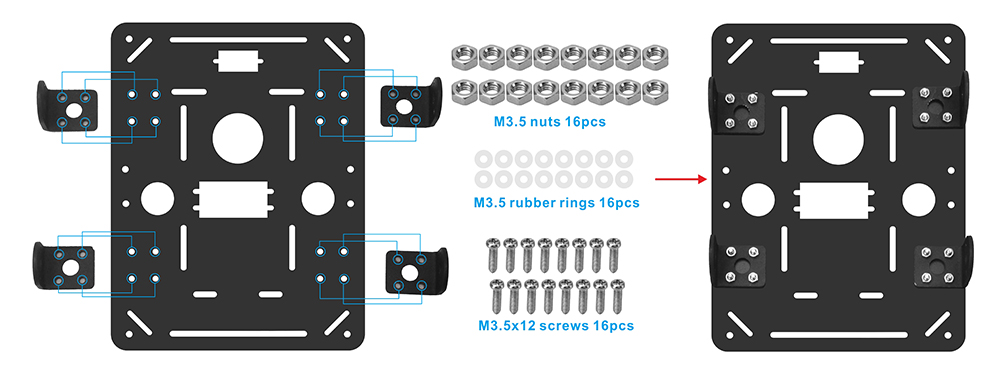
Schritt 1. Installieren Sie den Metallhalter mit 16 M3,5 x 12 Schrauben, M3,5 Gummiringen und M3,5 Muttern wie in den folgenden Abbildungen auf dem Metallchassis.
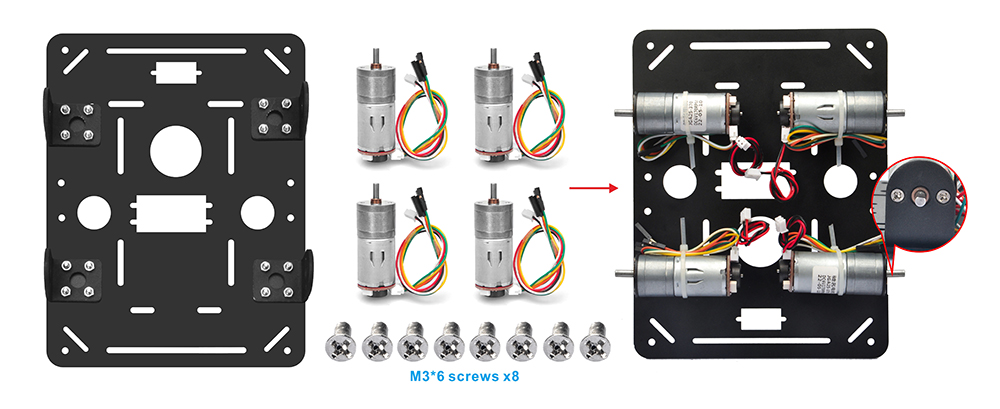
Schritt 2. Installieren Sie 8 Stück M3 * 6-Schrauben gemäß dem folgenden roten Kasten.
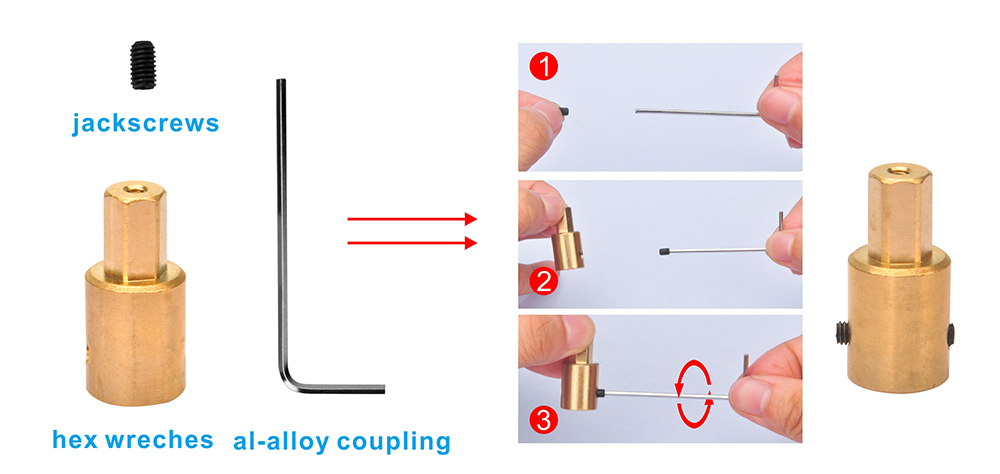
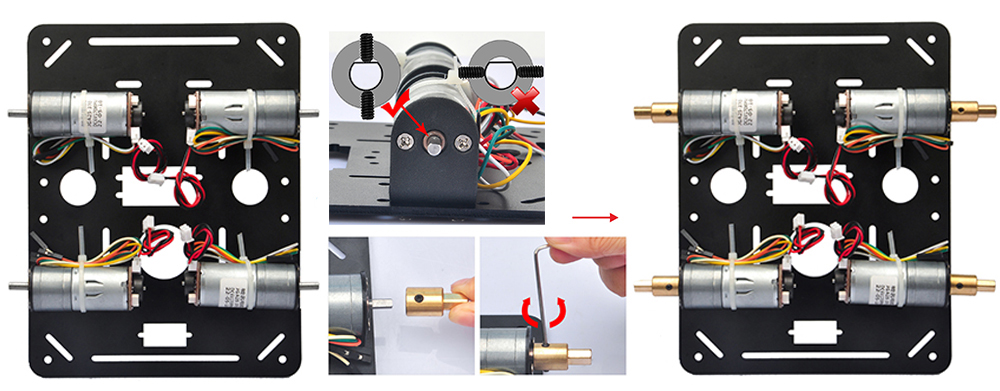
Schritt 3. Installieren Sie die Abdrückschrauben an der Al-Legierungskupplung, bitte ziehen Sie die Abdrückschrauben fest, um die Al-Legierungskupplung am Motor zu befestigen, wie in den folgenden Bildern gezeigt.
Stellen Sie sicher, dass die Abdrückschraube auf dieser Fläche positioniert wurde, und ziehen Sie beide Schrauben an der Welle wie in den folgenden Abbildungen fest.
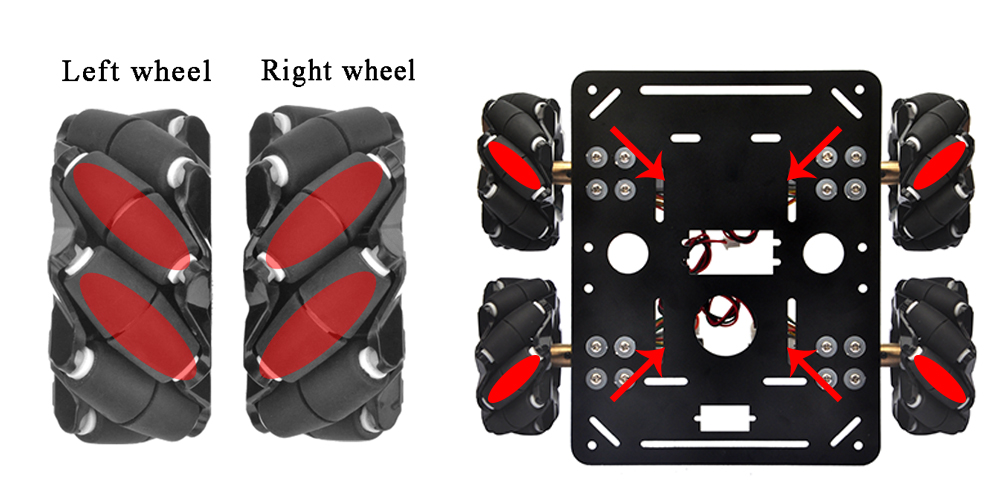
Step4. Install the 4 mecanum wheels on al-alloy coupling with 4pcs M2.5*10 as following pictures.
Es gibt zwei Arten von Mecunum-Rädern, linkes und rechtes Mecunum-Rad; der Unterschied zwischen ihnen ist die Ausrichtung der Rollen. Bei einem Mecunum-Rad sind die Rollen, wie unten gezeigt, von unten rechts nach oben links ausgerichtet. Rollen für B-Räder sind eingebaut umgekehrt.
Eine korrekte Konfiguration erfordert, dass jedes der vier Räder wie unten gezeigt eingestellt ist, wobei die Rotationsachse der oberen Rolle jedes Rads auf die Mitte der Plattform zeigt Bitte beachten Sie, dass alle dynamischen Analysen und vorgefertigten Codes auf dieser Konfiguration basieren.
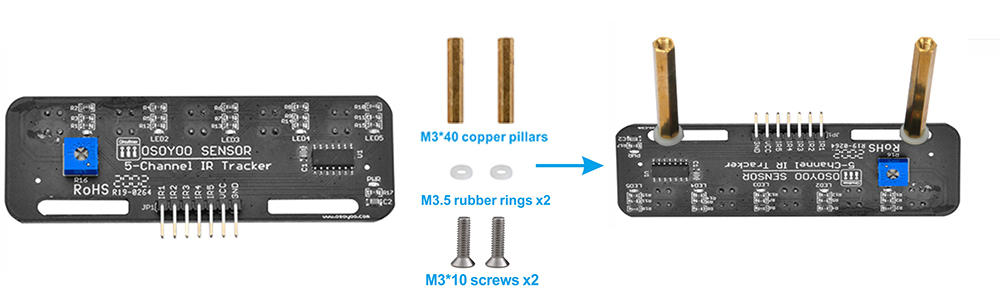
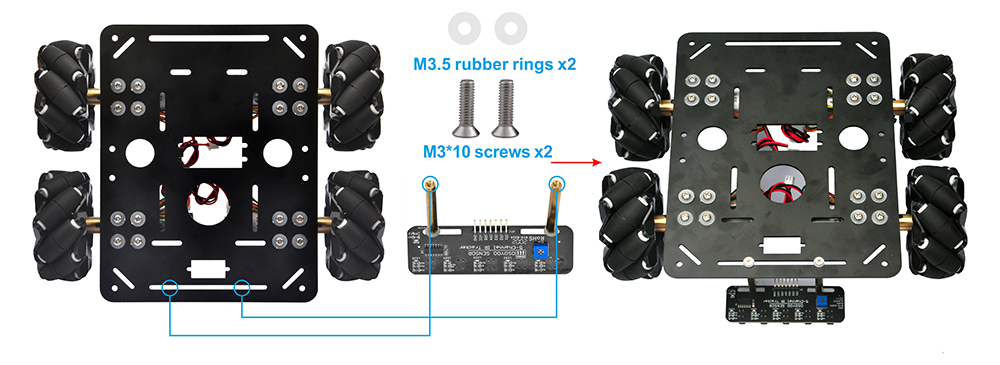
Schritt 5. Installieren Sie 2 Stück M3x40-Kupfersäulen mit 2 Stück M3-Schrauben und 2 Stück M3,5-Gummiringen am Tracking-Sensor, wie in den folgenden Bildern gezeigt.
Schritt 6. Wir werden dem Fahrzeugchassis ein 5-Punkt-Tracking-Sensormodul mit M3-Muttern hinzufügen, wie in den folgenden Bildern gezeigt.
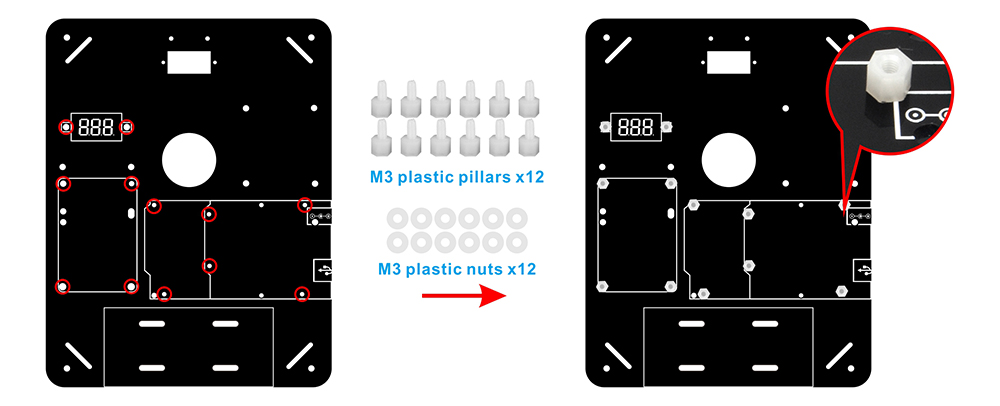
Schritt 7. Installieren Sie 12 Stück M3-Kunststoffsäulen und Muttern auf der Acrylplatte, wie in den folgenden Bildern gezeigt.
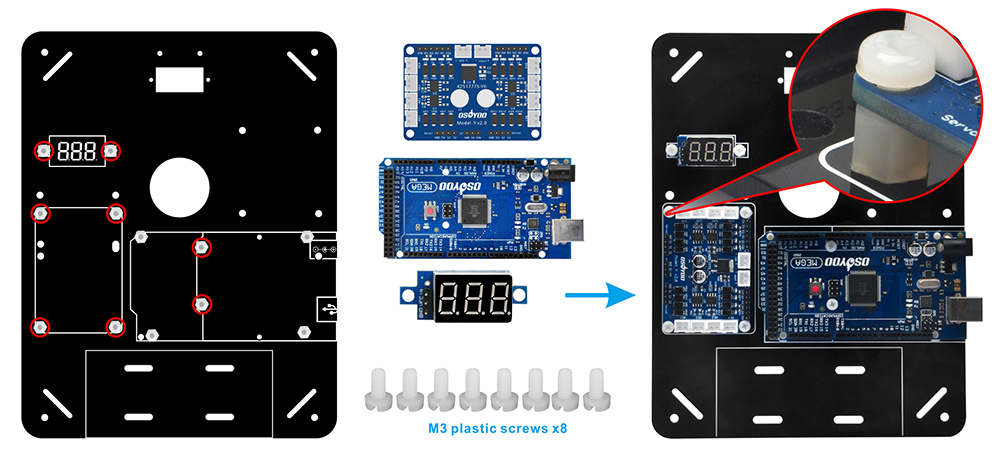
Schritt 8. Installieren Sie 1 Stück Osoyoo Mega2560-Platine, 1 Stück Motortreiberplatine Modell Y und 1 Stück Spannungsmesser mit den 8 Stück M3-Kunststoffschrauben wie in den folgenden Abbildungen auf dem Acrylgehäuse.
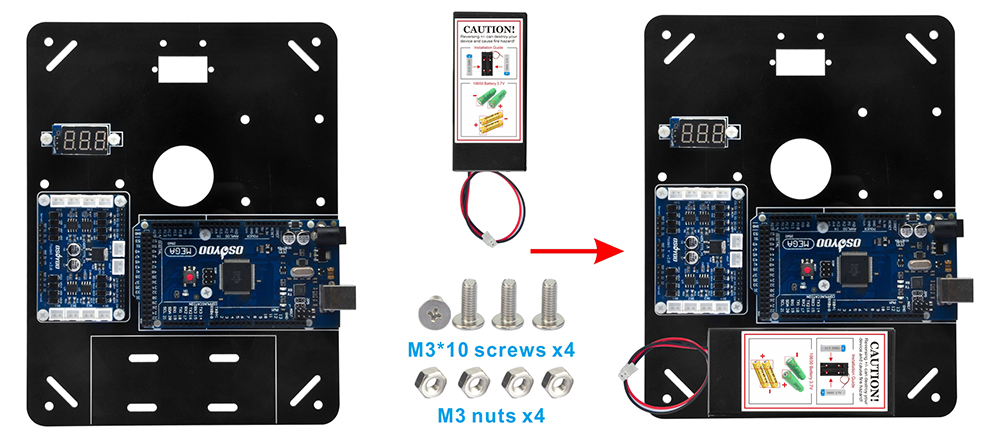
Schritt 9. Installieren Sie den Batteriekasten mit 4 Stück M3x10 Schrauben und Muttern wie in den folgenden Abbildungen.
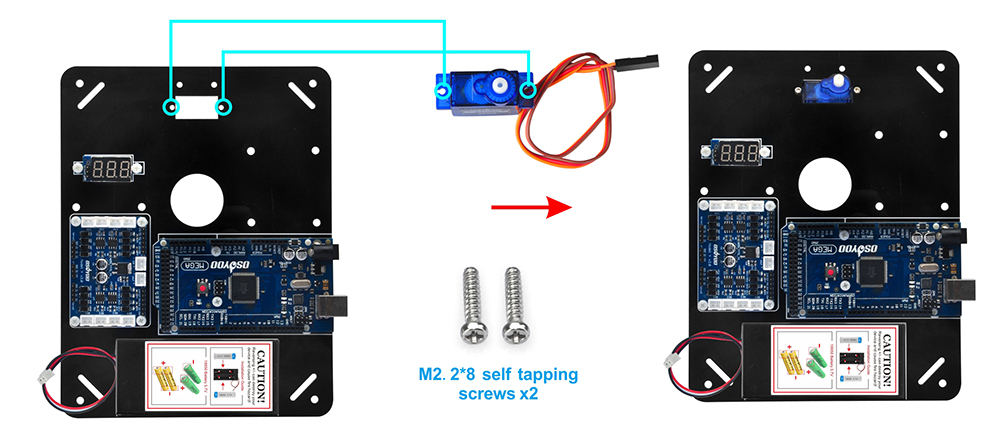
Schritt 10. Installieren Sie das SG90-Servo auf dem Acrylchassis mit 2 Stück M2,2 * 8 selbstschneidenden Schrauben, wie in den folgenden Abbildungen gezeigt.
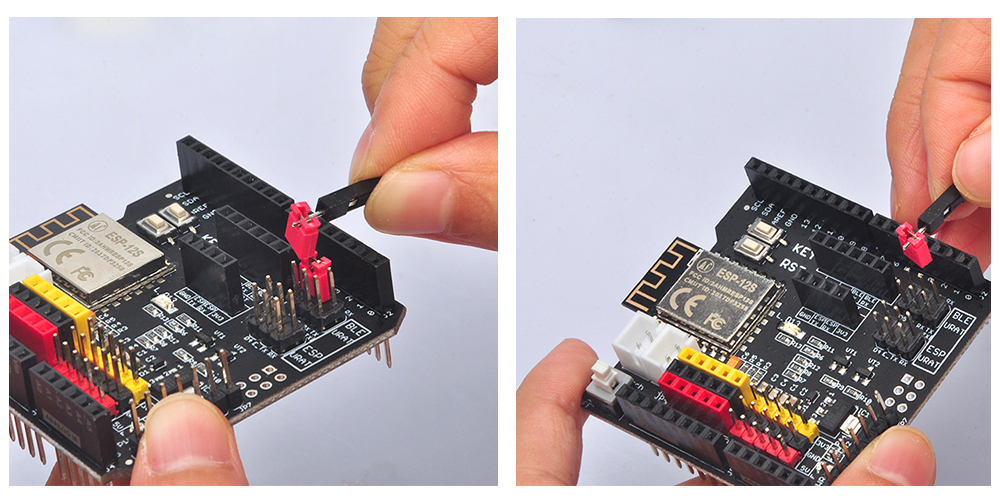
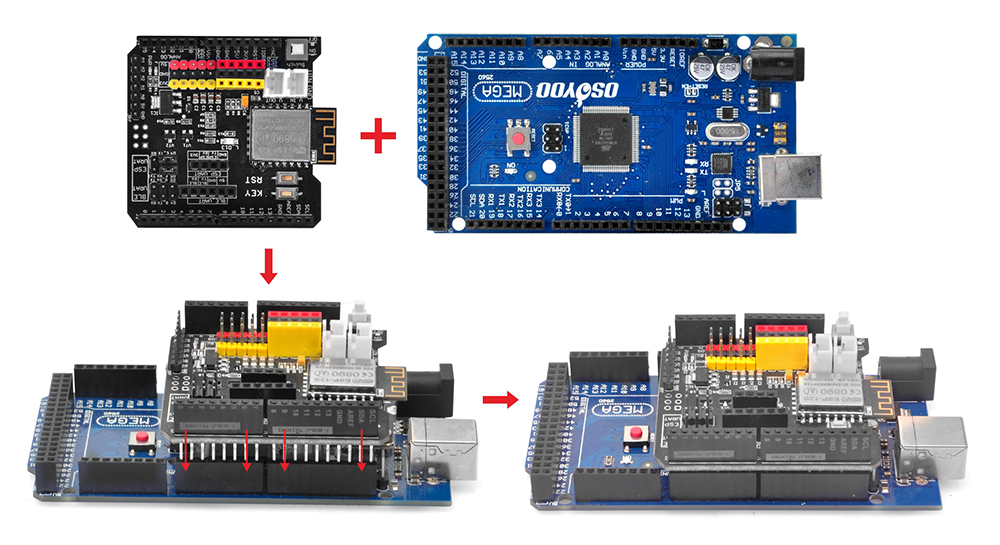
Schritt 11. Entfernen Sie die rote Jumper-Kappe vom WLAN-Schild und setzen Sie das OSOYOO-WLAN-Schild in das Arduino Mega2560-Board ein, wie in den folgenden Bildern gezeigt.
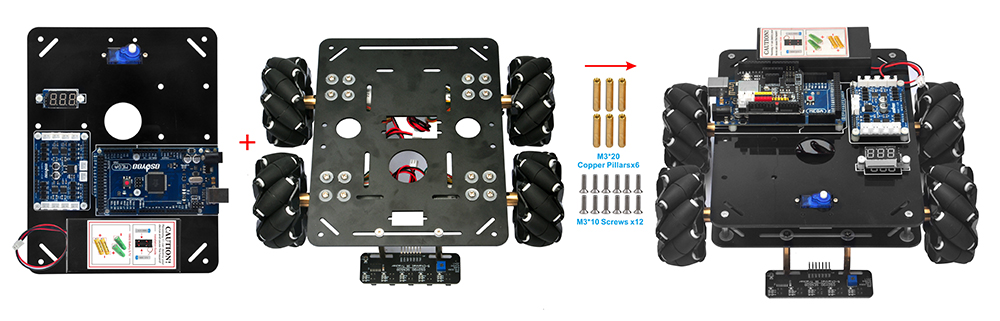
Schritt 12. Installieren Sie das Acrylchassis auf dem Metallchassis. Bitte beachten Sie die Vorder- und Rückseite des Acrylchassis und des Metallchassis.
Stellen Sie vor dem Anschließen der Kabel sicher, dass Sie das OSOYOO WIFI Shield bereits auf die MEGA2560-Platine gesteckt haben.
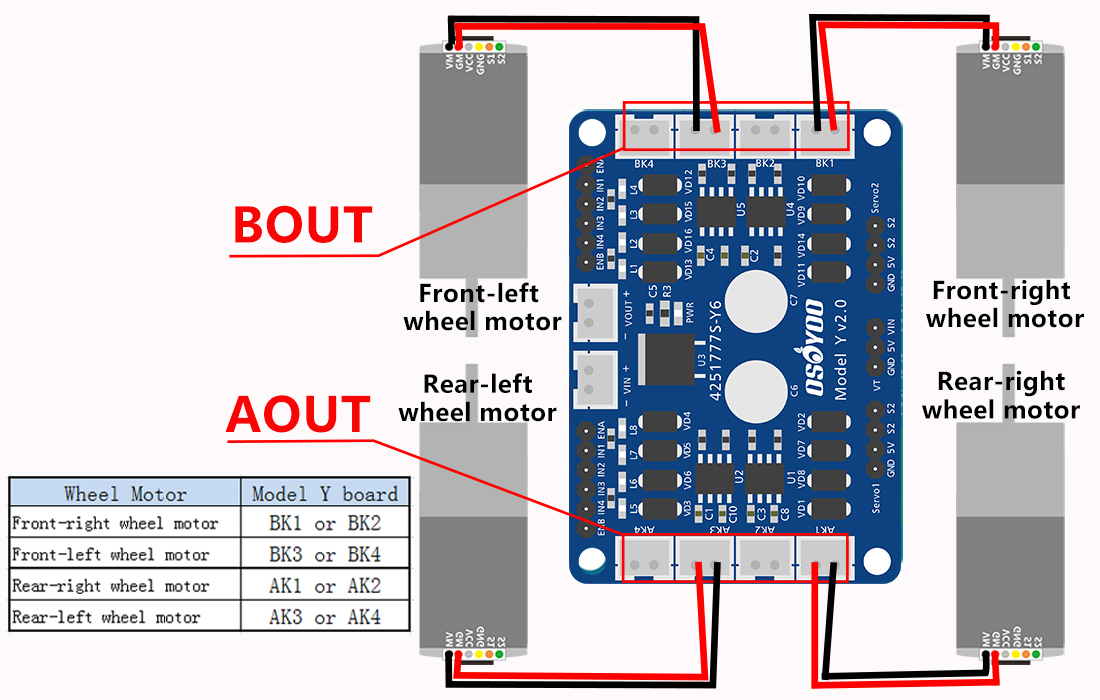
Schritt 13. Schließen Sie 4 Motoren an die Treiberplatine des Modells Y an, wie in den folgenden Bildern gezeigt..
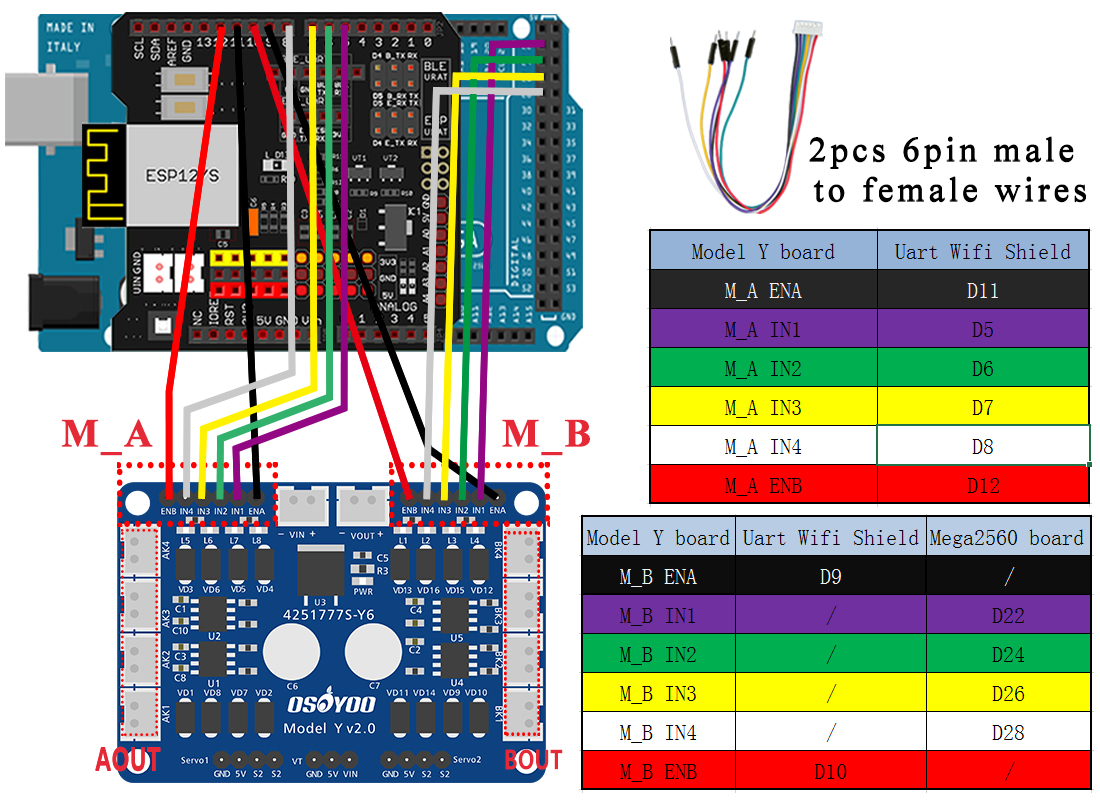
Schritt14.
Modell Y-Platine M_A IN1, IN2, IN3, IN4 Pin verbinden mit D5, D6, D7, D8.
Modell Y-Platine M_B Pin IN1, IN2, IN3, IN4 mit D22, D24, D26, D28 verbinden.
M_A ENA, ENB Pin verbinden mit D11, D12.
M_B ENA, ENB-Pin verbinden mit D9, D10.
Vorsicht:
Halten Sie beim Einstecken/Entfernen des 6-poligen Parallelkabelsteckers in den 6-poligen Stecker des Modells Y den weißen Stifthalter aus Kunststoff, um den Vorgang auszuführen. Ziehen Sie niemals an den Drähten, um den Stecker aus der Buchse zu ziehen, da dies sonst beschädigt wird Drähte.
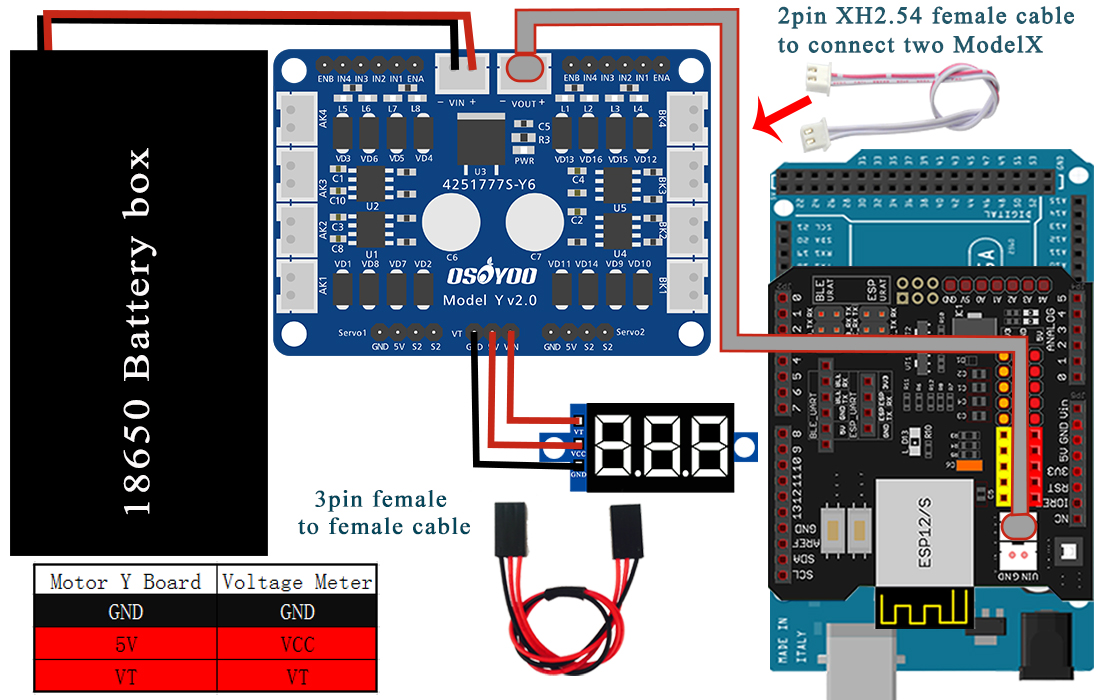
Schritt15.
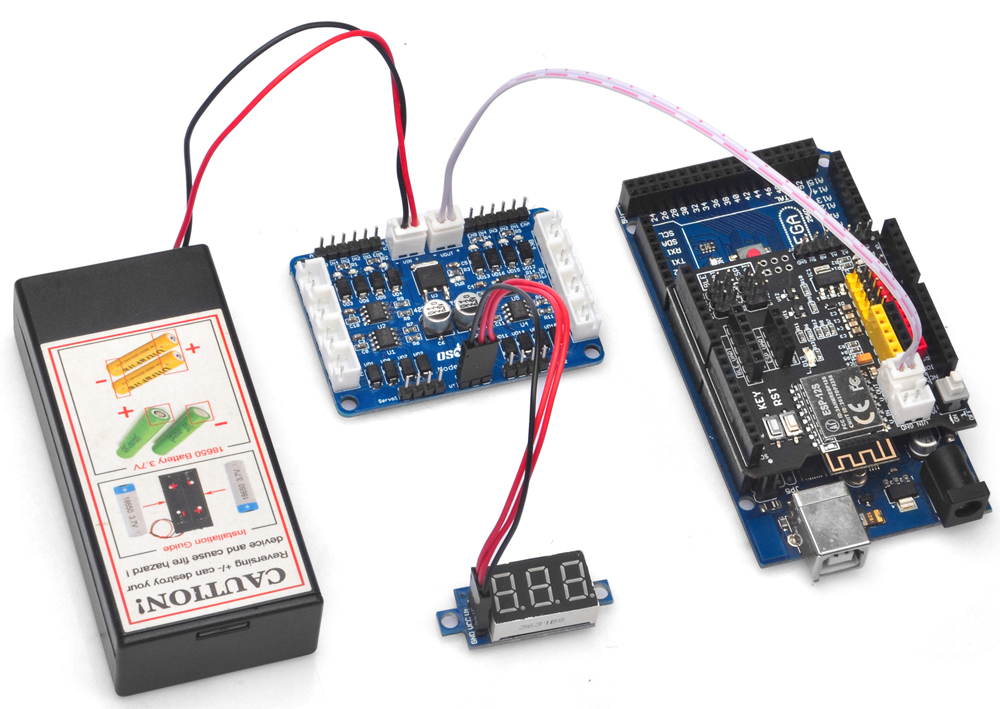
Schließen Sie den Spannungsmesser an die Motortreiberplatine des Modells Y mit einem 3-poligen Kabel von Buchse zu Buchse an, wie in der folgenden Abbildung gezeigt.
Verbinden Sie die Motortreiberplatine des Modells Y mit dem WLAN-Schild mit einem 2-poligen XH2.54-Buchsenkabel.
Schließen Sie die Batteriebox 18650 an die Motortreiberplatine des Modells Y an, wie in der folgenden Abbildung gezeigt.
Schritt 1: Installieren Sie die neueste Arduino IDE (Wenn Sie eine Arduino IDE-Version nach 1.1.16 haben, überspringen Sie bitte diesen Schritt.) Laden Sie Arduino IDE von herunter https://www.arduino.cc/en/Main/Software?setlang=en , Installieren Sie dann die Software.
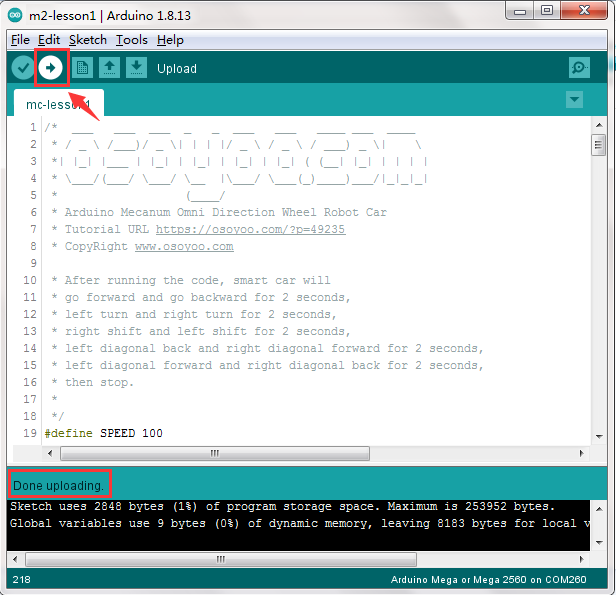
Schritt 3: Schließen Sie das Mega2560-Board mit einem USB-Kabel an den PC an, öffnen Sie die Arduino IDE -> klicken Sie auf Datei -> klicken Sie auf Öffnen -> wählen Sie den Code „lesson1.ino“ im Ordner Lesson1, laden Sie den Code in Arduino.
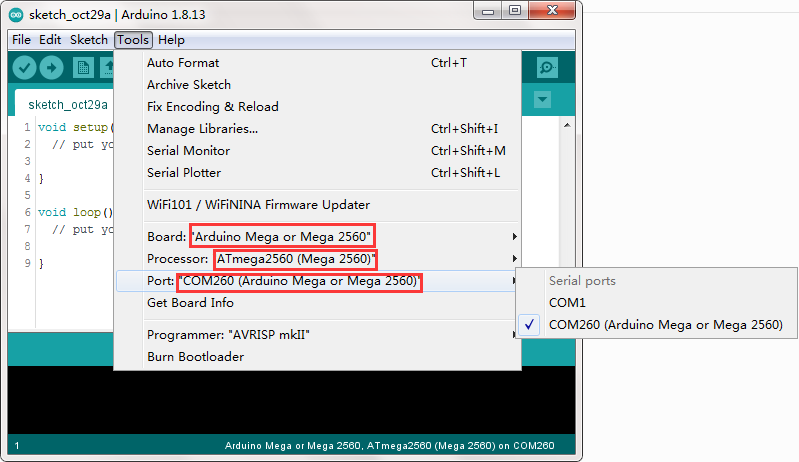
Schritt 4: Wählen Sie das entsprechende Board / Port für Ihr Projekt, laden Sie die Skizze auf das Board hoch.
Trennen Sie Arduino vom PC, legen Sie die Batterie in das Batteriefach. Wenn Sie das Auto auf den Boden stellen, schalten Sie den Schalter am OSOYOO Uart WIFI-Schild und den Schalter am Batteriefach ein.
Nach dem Ausführen des Lektion 1-Codes bewegt sich das Auto
Vorwärts→Rückwärts→Linkskurve→Rechtskurve→
Parallelverschiebung rechts→Parallelverschiebung links→
Diagonal nach oben rechts→ Diagonal nach unten links→
Diagonal nach oben links → Diagonal nach unten rechts
Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.

















Thank you for this lesson
I got to the loading of the program and the robot performed the movements correctly
Iknow a little about the “arduino” software but I don’t understand from what the movements are made !
There is nothing in the “loop” loop
Can you give mesome information ?
Thank you
Regards
Jaco51
First of all, I suppose you have some basic idea about C language and its grammar. Also know a little bit about the function concept. If not, please google some beginner’s tutorial about C programming.
In each of Arduino code there must be two functions: setup() and loop(), setup() function will be executed once when Arduino is powered up. After setup() function is executed, then Arduino will execute loop() function over and over.
The code inside the curly braces {} of the loop() function will be executed repeatedly until the power is turned off, that’s why it is named the loop function.
In this lesson, loop() function is empty, so our project will only run the code inside setup() function. After running the last statement of setup() functions, the car program will end and stop.